Fundamentals of Kalman Filtering and Applications to GNSS
Fundamentals of Kalman Filtering and Applications to GNSS
Fundamentals of Kalman Filtering and Applications to GNSS

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
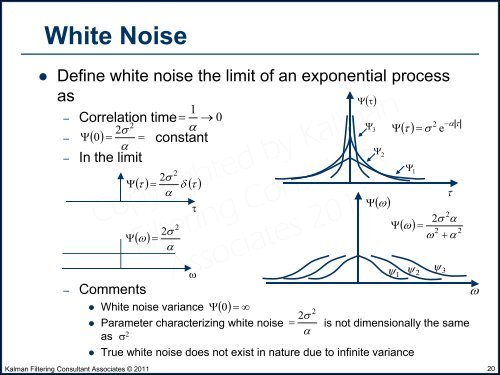
White Noise<br />
• Define white noise the limit <strong>of</strong> an exponential process<br />
as<br />
– Correlation time <br />
2s <br />
– <br />
2<br />
0 constant<br />
<br />
– In the limit<br />
<br />
<br />
<br />
<br />
<br />
<br />
– Comments<br />
2s<br />
<br />
<br />
2<br />
2s<br />
<br />
<br />
2<br />
<br />
<br />
1 0<br />
<br />
<br />
<br />
<br />
• White noise variance 0 <br />
2s 2<br />
• Parameter characterizing white noise is not dimensionally the same<br />
as s 2<br />
<br />
• True white noise does not exist in nature due <strong>to</strong> infinite variance<br />
3<br />
2<br />
<br />
<br />
<br />
<br />
<br />
<br />
1<br />
2<br />
s e<br />
<br />
<br />
2<br />
2s<br />
<br />
<br />
<br />
2 2<br />
<br />
<br />
1 2 3<br />
<br />
<strong>Kalman</strong> <strong>Filtering</strong> Consultant Associates © 2011<br />
20