Fundamentals of Kalman Filtering and Applications to GNSS
Fundamentals of Kalman Filtering and Applications to GNSS
Fundamentals of Kalman Filtering and Applications to GNSS

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
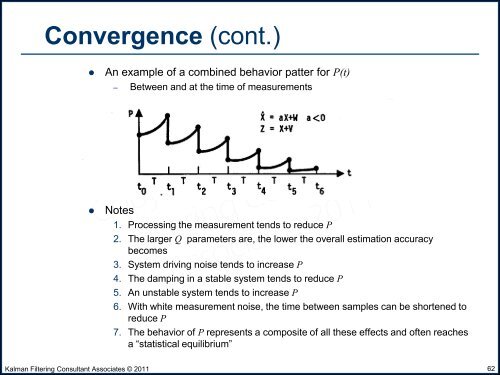
Convergence (cont.)<br />
• An example <strong>of</strong> a combined behavior patter for P(t)<br />
– Between <strong>and</strong> at the time <strong>of</strong> measurements<br />
• Notes<br />
1. Processing the measurement tends <strong>to</strong> reduce P<br />
2. The larger Q parameters are, the lower the overall estimation accuracy<br />
becomes<br />
3. System driving noise tends <strong>to</strong> increase P<br />
4. The damping in a stable system tends <strong>to</strong> reduce P<br />
5. An unstable system tends <strong>to</strong> increase P<br />
6. With white measurement noise, the time between samples can be shortened <strong>to</strong><br />
reduce P<br />
7. The behavior <strong>of</strong> P represents a composite <strong>of</strong> all these effects <strong>and</strong> <strong>of</strong>ten reaches<br />
a ―statistical equilibrium‖<br />
<strong>Kalman</strong> <strong>Filtering</strong> Consultant Associates © 2011<br />
62