Fundamentals of Kalman Filtering and Applications to GNSS
Fundamentals of Kalman Filtering and Applications to GNSS
Fundamentals of Kalman Filtering and Applications to GNSS

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
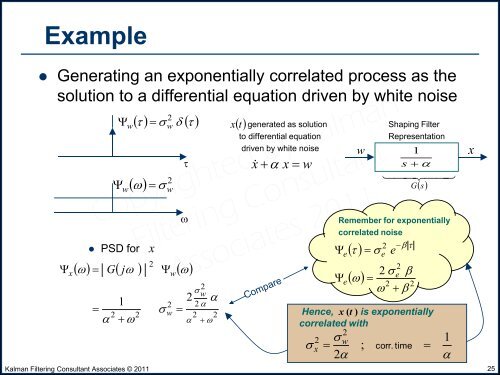
Example<br />
• Generating an exponentially correlated process as the<br />
solution <strong>to</strong> a differential equation driven by white noise<br />
<br />
<br />
w s<br />
<br />
w<br />
<br />
s<br />
2<br />
w<br />
2<br />
w<br />
<br />
<br />
x<br />
t<br />
<br />
generated as solution<br />
<strong>to</strong> differential equation<br />
driven by white noise<br />
x<br />
x w<br />
w<br />
Shaping Filter<br />
Representation<br />
1<br />
s <br />
<br />
<br />
Gs<br />
x<br />
<br />
x<br />
<br />
• PSD for x<br />
2<br />
<br />
G j<br />
<br />
<br />
1<br />
<br />
2 2<br />
<br />
<strong>Kalman</strong> <strong>Filtering</strong> Consultant Associates © 2011<br />
s<br />
w<br />
2<br />
w<br />
<br />
s<br />
2<br />
w<br />
2<br />
2 <br />
2 2<br />
<br />
<br />
<br />
<br />
e<br />
e<br />
s w<br />
<br />
2<br />
Remember for exponentially<br />
correlated noise<br />
<br />
<br />
s<br />
2<br />
e<br />
e<br />
2 s<br />
<br />
2<br />
<br />
e<br />
<br />
<br />
2 2<br />
<br />
Hence, x (t ) is exponentially<br />
correlated with<br />
2<br />
2<br />
s x ; corr. time <br />
1<br />
<br />
25