Fundamentals of Kalman Filtering and Applications to GNSS
Fundamentals of Kalman Filtering and Applications to GNSS
Fundamentals of Kalman Filtering and Applications to GNSS

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
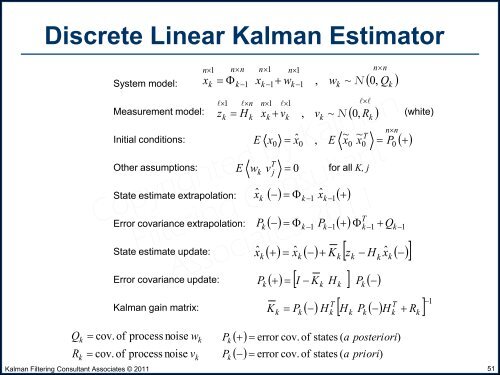
Discrete Linear <strong>Kalman</strong> Estima<strong>to</strong>r<br />
System model:<br />
n1<br />
x<br />
k<br />
nn<br />
k1<br />
n1<br />
k1<br />
n1<br />
k1<br />
k<br />
<br />
nn<br />
x w , w ~ N 0,<br />
Q<br />
k<br />
<br />
Measurement model:<br />
Initial conditions:<br />
1<br />
n<br />
n1<br />
1<br />
<br />
<br />
z H x v , v ~ N 0,<br />
R<br />
k<br />
k<br />
k<br />
k<br />
k<br />
T<br />
E x xˆ<br />
~ ~<br />
0 0 , E x0<br />
x0<br />
P0<br />
k<br />
<br />
nn<br />
(white)<br />
<br />
Other assumptions:<br />
E<br />
w k v T j<br />
0<br />
for all K, j<br />
State estimate extrapolation:<br />
Error covariance extrapolation:<br />
State estimate update:<br />
Error covariance update:<br />
<strong>Kalman</strong> gain matrix:<br />
xˆ<br />
k<br />
<br />
x ˆ k x<br />
P<br />
k<br />
P<br />
xˆ<br />
<br />
K z H xˆ<br />
<br />
k<br />
k<br />
ˆ k1 k1<br />
<br />
T<br />
k 1 P k 1 k 1<br />
Qk<br />
1<br />
k<br />
<br />
I<br />
Kk<br />
H k Pk<br />
<br />
T<br />
T<br />
K P <br />
H H<br />
P H<br />
R 1<br />
k<br />
k<br />
k<br />
k<br />
k<br />
k<br />
k<br />
k<br />
k<br />
<br />
k<br />
Q<br />
R<br />
<strong>Kalman</strong> <strong>Filtering</strong> Consultant Associates © 2011<br />
k<br />
k<br />
<br />
<br />
cov. <strong>of</strong><br />
cov. <strong>of</strong><br />
process noise w<br />
process noise v<br />
k<br />
k<br />
P<br />
P<br />
k<br />
k<br />
<br />
error cov. <strong>of</strong> states (<br />
error cov. <strong>of</strong> states ( a priori)<br />
a posteriori)<br />
51