Fundamentals of Kalman Filtering and Applications to GNSS
Fundamentals of Kalman Filtering and Applications to GNSS
Fundamentals of Kalman Filtering and Applications to GNSS

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
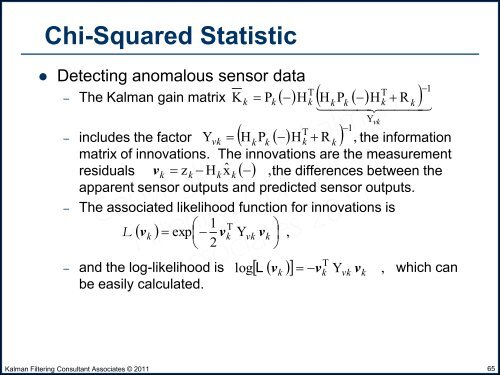
Chi-Squared Statistic<br />
• Detecting anomalous sensor data<br />
– The <strong>Kalman</strong> gain matrix K P <br />
<br />
– includes the fac<strong>to</strong>r Yvk<br />
HkPk<br />
Hk<br />
R<br />
k the information<br />
matrix <strong>of</strong> innovations. The innovations are the measurement<br />
residuals v k zk<br />
Hk<br />
xˆ<br />
k , the differences between the<br />
apparent sensor outputs <strong>and</strong> predicted sensor outputs.<br />
– The associated likelihood function for innovations is<br />
1 T <br />
L vk<br />
exp<br />
vk<br />
Yvk<br />
vk<br />
,<br />
2 <br />
k<br />
– <strong>and</strong> the log-likelihood is log L vk<br />
vk<br />
Yvk<br />
vk<br />
which can<br />
be easily calculated.<br />
k<br />
H<br />
T<br />
k<br />
<br />
T<br />
<br />
1<br />
,<br />
<br />
H<br />
k<br />
P<br />
<br />
k<br />
Hk<br />
R<br />
k<br />
<br />
Y<br />
vk<br />
T<br />
,<br />
T<br />
<br />
1<br />
<strong>Kalman</strong> <strong>Filtering</strong> Consultant Associates © 2011<br />
65