

Sirgue, L., and Pratt, R. G., 2003. - Queen's University
Sirgue, L., and Pratt, R. G., 2003. - Queen's University
Sirgue, L., and Pratt, R. G., 2003. - Queen's University

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Waveform Inversion under Realistic Conditions: Mitigation of non-linearity.<br />
L. <strong>Sirgue</strong>, Ecole Normal Supérieure de Paris / CGG France, <strong>and</strong> R. Gerhard <strong>Pratt</strong> ∗ , Queen’s <strong>University</strong>,<br />
Canada.<br />
Summary<br />
Using a realistic starting model <strong>and</strong> starting frequency,<br />
st<strong>and</strong>ard waveform inversion methods are likely to fail to<br />
converge to the global minimum of the misfit function. A<br />
strategy that relies on the preconditioning of the gradient<br />
direction <strong>and</strong> data residuals can be developed. Such<br />
strategy can improve the convergence accuracy, but is<br />
nevertheless delicate to implement.<br />
Introduction<br />
In waveform inversion, we aim to recover a quantitative<br />
model of the subsurface in a way that minimizes the difference<br />
between observed <strong>and</strong> calculated data. Because of<br />
the high computational cost of calculating the synthetic<br />
data, the inverse problem is the most often solved by local<br />
methods which rely on the repeated calculation of the gradient<br />
of the least-squares misfit function at each iteration<br />
(Tarantola, 1984). Due to the high non-linearity of the<br />
waveform inverse problem, the misfit function presents<br />
numerous local minima that must be avoided in order<br />
to insure convergence within the global minimum. The<br />
success of waveform inversion of depends upon two main<br />
aspects, 1: the accuracy of the starting model <strong>and</strong> 2:<br />
the minimum frequency at which the inversion is initiated.<br />
Often, synthetic examples of waveform inversion<br />
are shown when both or one or these parameters are unrealistic<br />
(Forgues et al., 1998; Freudenreich et al., 2001;<br />
<strong>Sirgue</strong> <strong>and</strong> <strong>Pratt</strong>, 2001; Shipp <strong>and</strong> Singh, 2002), i.e. either<br />
the starting model is unrealistically close to the true<br />
model or the frequency is too low to be present in real<br />
seismic data b<strong>and</strong>width.<br />
In this paper we show that st<strong>and</strong>ard gradient methods<br />
(without preconditioning) are unlikely to provide accurate<br />
convergence if the starting model <strong>and</strong> the lowest frequency<br />
are realistic. In such a case, a set of methods<br />
for preconditioning of the gradient <strong>and</strong> the data residuals<br />
must be applied in order to improve the convergence of<br />
the waveform inversion.<br />
We carry out our demonstration on a 2-D numerical experiment<br />
in which the true model is an extended version<br />
of the Marmousi model (18 km long). We first illustrate<br />
the difficulties associate with inversion by showing a set<br />
of inversions illustrating the issue of local minima. We<br />
then propose a set of preconditioning operators that are<br />
applied to the gradient <strong>and</strong> data residuals that improve<br />
the convergence accuracy of the inversion.<br />
a)<br />
V (m/s)<br />
b)<br />
V (m/s)<br />
3500<br />
3000<br />
2500<br />
2000<br />
1500<br />
3500<br />
3000<br />
2500<br />
2000<br />
1500<br />
Depth (km)<br />
Depth (km)<br />
0<br />
0.5<br />
1.0<br />
1.5<br />
2.0<br />
0<br />
0.5<br />
1.0<br />
1.5<br />
2.0<br />
Distance (km)<br />
0 1 2 3 4 5 6 7 8 9<br />
Distance (km)<br />
0 1 2 3 4 5 6 7 8 9<br />
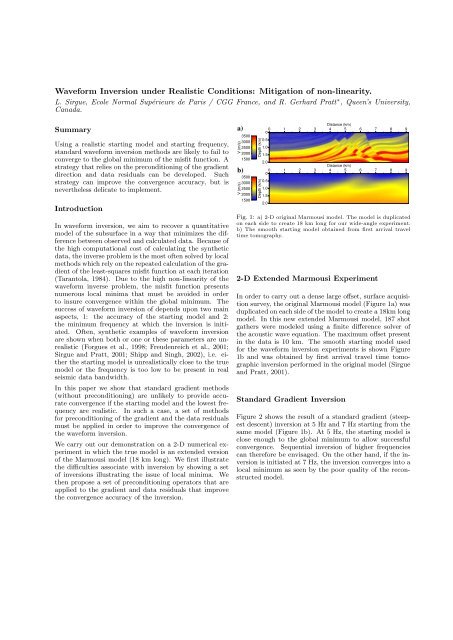
Fig. 1: a) 2-D original Marmousi model. The model is duplicated<br />
on each side to create 18 km long for our wide-angle experiment.<br />
b) The smooth starting model obtained from first arrival travel<br />
time tomography.<br />
2-D Extended Marmousi Experiment<br />
In order to carry out a dense large offset, surface acquisition<br />
survey, the original Marmousi model (Figure 1a) was<br />
duplicated on each side of the model to create a 18km long<br />
model. In this new extended Marmousi model, 187 shot<br />
gathers were modeled using a finite difference solver of<br />
the acoustic wave equation. The maximum offset present<br />
in the data is 10 km. The smooth starting model used<br />
for the waveform inversion experiments is shown Figure<br />
1b <strong>and</strong> was obtained by first arrival travel time tomographic<br />
inversion performed in the original model (<strong>Sirgue</strong><br />
<strong>and</strong> <strong>Pratt</strong>, 2001).<br />
St<strong>and</strong>ard Gradient Inversion<br />
Figure 2 shows the result of a st<strong>and</strong>ard gradient (steepest<br />
descent) inversion at 5 Hz <strong>and</strong> 7 Hz starting from the<br />
same model (Figure 1b). At 5 Hz, the starting model is<br />
close enough to the global minimum to allow successful<br />
convergence. Sequential inversion of higher frequencies<br />
can therefore be envisaged. On the other h<strong>and</strong>, if the inversion<br />
is initiated at 7 Hz, the inversion converges into a<br />
local minimum as seen by the poor quality of the reconstructed<br />
model.
a)<br />
V (m/s)<br />
3500<br />
3000<br />
2500<br />
2000<br />
1500<br />
b)<br />
V (m/s)<br />
3500<br />
3000<br />
2500<br />
2000<br />
1500<br />
Depth (km)<br />
Depth (km)<br />
Distance (km)<br />
0 1 2 3 4 5 6 7 8 9<br />
0<br />
0.5<br />
1.0<br />
1.5<br />
2.0<br />
0<br />
0.5<br />
1.0<br />
1.5<br />
2.0<br />
Distance (km)<br />
0 1 2 3 4 5 6 7 8 9<br />
Fig. 2: St<strong>and</strong>ard gradient (steepest descent) method. a) Inversion at 5 Hz. b) Inversion at 7 Hz. At 7 Hz, the inversion fails because<br />
the starting model is not close enough to the global minimum.<br />
Preconditioning methods<br />
Wavenumber Filtering of the Gradient Direction<br />
It is well known that waveform inversion of wide angle<br />
seismic data allows both migration-like <strong>and</strong> tomographiclike<br />
reconstructions (Mora, 1989). The inversion can<br />
hence potentially recover both the low <strong>and</strong> high wavenumber<br />
components of the velocity model. The migration<br />
must however occur after the convergence of the tomographic<br />
reconstruction, as the high wavenumber must be<br />
updated once the low wavenumber are accurate. Further<br />
tests (not shown here) demonstrate that the gradient is in<br />
fact dominated by the migration regime so that the convergence<br />
rate of the low wavenumbers is slow compared<br />
to the one of the high wavenumbers. Therefore, in order<br />
to compensate for this characteristic of the gradient, the<br />
high wavenumber components are removed by the application<br />
of a 2-D low-pass wavenumber filter to the gradient<br />
vector.<br />
Time Damping of the data residuals<br />
The inversion of the early arrivals is useful because they<br />
contribute to the tomographic reconstruction of the low<br />
wavenumbers. Moreover, the first arrivals are less sensitive<br />
to kinematic errors because they correspond to the<br />
shortest ray paths providing the low wavenumber information.<br />
The early arrivals are therefore the most linear<br />
components of the wavefield.<br />
Although the inversion of a single frequency prevents the<br />
use of time windowing to select the early arrivals, a time<br />
damping function may however be applied by using a complex<br />
angular frequency (ω ′<br />
= ω + i/τ), in the numerical<br />
modeling (Mallick <strong>and</strong> Frazer, 1987). This time damping<br />
may be applied to a single frequency <strong>and</strong> does not require<br />
a time representation of the wavefield. The time equivalent<br />
function f(t) is hence multiplied by an exponential<br />
decay function e −t/τ . Further multiplication of the wavefield<br />
by the term e to/τ of the time damping operator may<br />
be applied so that the damping is 1 at a chosen time t o.<br />
The equivalent time damped signal may then be expressed<br />
as<br />
f ′ (t) = e −(t−to)/τ f(t)<br />
=<br />
∫ +∞<br />
−∞<br />
e −iωt Ψ (ω + i/τ) × e to/τ dω, (1)<br />
where τ is the damping term, t o is the time origin <strong>and</strong><br />
Ψ(ω) is the complex wavefield. The time damping may<br />
be applied in waveform inversion so that early arrivals are<br />
predominant in the data residuals. The first arrival travel<br />
time picks must be provided for the time reference t o.<br />
Preconditioned Inversion<br />
In order to improve the convergence efficiency of the waveform<br />
inversion starting at 7 Hz, we propose a strategy relying<br />
on both the preconditioning of the gradient vector<br />
<strong>and</strong> the data residuals described previously. This strategy<br />
is decomposed into two main steps, 1: the low wavenumbers<br />
are recovered using time damping of the data residuals<br />
<strong>and</strong> wavenumber filtering of the gradient, 2: the high<br />
wavenumbers are recovered later in the inversion by using<br />
the full near offset wavefield (without time damping).
a)<br />
V (m/s)<br />
b)<br />
V (m/s)<br />
c)<br />
V (m/s)<br />
3500<br />
3000<br />
2500<br />
2000<br />
1500<br />
3500<br />
3000<br />
2500<br />
2000<br />
1500<br />
3500<br />
3000<br />
2500<br />
2000<br />
1500<br />
Depth (km)<br />
Depth (km)<br />
Depth (km)<br />
0<br />
0.5<br />
1.0<br />
1.5<br />
2.0<br />
0<br />
0.5<br />
1.0<br />
1.5<br />
2.0<br />
Distance (km)<br />
0 1 2 3 4 5 6 7 8 9<br />
0<br />
0.5<br />
1.0<br />
1.5<br />
2.0<br />
Distance (km)<br />
0 1 2 3 4 5 6 7 8 9<br />
Distance (km)<br />
0 1 2 3 4 5 6 7 8 9<br />
Fig. 3: Preconditioned waveform inversion at 7 Hz. Stage 1: gradient wavenumber filtering is applied with a) τ = 0.1s <strong>and</strong> then b)<br />
τ = 0.25s. b) Stage 2: St<strong>and</strong>ard Inversion of offset 0.2-5 km. Each pass of stage 1 was carried out inverting from the near to the far<br />
offsets.<br />
a)<br />
0<br />
1<br />
2<br />
Offset (km)<br />
-9 -8 -7 -6 -5 -4 -3 -2 -1 0 1 2 3 4 5 6 7 8<br />
b)<br />
0<br />
1<br />
2<br />
Offset (km)<br />
-9 -8 -7 -6 -5 -4 -3 -2 -1 0 1 2 3 4 5 6 7 8<br />
Time (s)<br />
3<br />
4<br />
5<br />
6<br />
7<br />
Time (s)<br />
3<br />
4<br />
5<br />
6<br />
7<br />
Fig. 4: Time modeling using 114 frequencies. Shot point at 4.6 km. The source term is a Ricker with a peak frequency at 5 Hz.a)<br />
The true dat. b) The modeling in the final model of inversion.
a) b)<br />
Velocity (m/s)<br />
1500 2000 2500 3000 3500 4000<br />
c)<br />
0<br />
Velocity (m/s)<br />
1500 2000 2500 3000 3500 4000<br />
0<br />
0<br />
Velocity (m/s)<br />
1500 2000 2500 3000 3500 4000<br />
500<br />
500<br />
500<br />
Depth (m)<br />
1000<br />
Depth (m)<br />
1000<br />
Depth (m)<br />
1000<br />
1500<br />
1500<br />
1500<br />
2000<br />
2000<br />
2000<br />
Fig. 5: Velocity traces showing the true model (gray), the starting model (dotted) <strong>and</strong> the inversion result (solid). a) Trace at 2.9<br />
km.b) Trace at 4.5 km. c) Trace at 6 km.<br />
For the recovery of the low wavenumbers, we advocate<br />
an approach that inverts from the near to the far offset<br />
data thus effectively carrying out a layer stripping<br />
strategy (Figure 3a-c). The first arrival travel times were<br />
picked in order to apply time damping with a initial value<br />
of τ = 0.1 s. The wavenumber filter prevents wavenumbers<br />
beyond k = 1 km −1 from being updated. The time<br />
damping is then relaxed by decreasing the damping with<br />
a value of τ = 0.25 s thus including later arrivals in the<br />
inversion. The final stage of the inversion was carried out<br />
with no preconditioning (Figure 3d), only the near offset<br />
data were inverted. Although the modeling in time in the<br />
final model (Figure 4b) shows an overall good fit with the<br />
true data (Figure 4a), the velocity trace extracted from<br />
the model (Figure 5) shows that some parts of the model<br />
are less accurately recovered.<br />
Conclusion<br />
scheme:, in 63rd Mtg. Eur. Assn. of Expl. Geophys.,<br />
Session: O–19.<br />
Mallick, S., <strong>and</strong> Frazer, N. L., 1987, Practical aspects of<br />
reflectivity modeling: Geophysics, 52, 1355–1364.<br />
Mora, P., 1989, Inversion = migration + tomography:<br />
Geophysics, 54, no. 12, 1575–1586.<br />
Shipp, R. M., <strong>and</strong> Singh, S. C., 2002, Two-dimensional<br />
full wavefield inversion of wide-aperture marine seismic<br />
streamer data: Geophys. J. Int., 151, 325–344.<br />
<strong>Sirgue</strong>, L., <strong>and</strong> <strong>Pratt</strong>, R., 2001, An optimal choice of temporal<br />
frequencies for imaging: application to waveform<br />
inversion.:, in 71st Ann. Internat. Mtg Soc. of Expl.<br />
Geophys., 698–701.<br />
Tarantola, A., 1984, Inversion of seismic reflection data<br />
in the acoustic approximation: Geophysics, 49, no. 08,<br />
1259–1266.<br />
We have shown that when the starting frequency (7 Hz)<br />
<strong>and</strong> the starting model used are both realistic, st<strong>and</strong>ard<br />
waveform inversion is likely to fail. A set of preconditioning<br />
tools should therefore be applied that improve the<br />
convergence accuracy. However, the accuracy of the velocity<br />
model may be difficult to evaluate on real data as<br />
errors in the model will not be easy to identify.<br />
Acknowledgments<br />
We thank CGG France for sponsoring this work.<br />
References<br />
Forgues, E., Scala, E., <strong>and</strong> <strong>Pratt</strong>, R. G., 1998, High resolution<br />
velocity model estimation from refraction <strong>and</strong><br />
reflection data:, in 68th Ann. Internat. Mtg, Soc. Expl.<br />
Geophys., Exp<strong>and</strong>ed Abstracts Soc. of Expl. Geophys.,<br />
1211–1214.<br />
Freudenreich, Y., Singh, S., <strong>and</strong> Barton, P., 2001, Subbasalt<br />
imaging using a full elastic wavefield inversion














