Introduction to and Andy Ruina and Rudra Pratap
Introduction to and Andy Ruina and Rudra Pratap
Introduction to and Andy Ruina and Rudra Pratap

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
12 Chapter 0. Preface Preface<br />
namics or more advanced Multi-object Dynamics.<br />
Organization <strong>and</strong> formatting<br />
Each subject is covered in various ways.<br />
Every section starts with descriptive text <strong>and</strong> short examples motivating<br />
<strong>and</strong> describing the theory;<br />
More detailed explanations of the theory are in boxes interspersed in<br />
the text. For example, one box explains the common derivation of angular<br />
momentum balance from * F D m * a (page 974), one explains the<br />
genius of the wheel (page 208), <strong>and</strong> another connects * ! based kinematics<br />
<strong>to</strong> Oe r <strong>and</strong> Oe based kinematics (page 856);<br />
Sample problems (marked with a gray border) at the end of each section<br />
show how <strong>to</strong> do homework-like calculations. These set an example<br />
by their consistent use of free-body diagrams, systematic application<br />
of basic principles, vec<strong>to</strong>r notation, units, <strong>and</strong> checks against both intuition<br />
<strong>and</strong> special cases;<br />
Homework problems at the end of each chapter give students a chance<br />
<strong>to</strong> practice mechanics calculations. The first problems for each section<br />
build a student’s confidence with the basic ideas. The problems are<br />
ranked in approximate order of difficulty, with theoretical problems<br />
coming later. Problems marked with a * have an answer at the back<br />
of the book;<br />
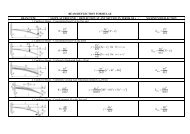
Reference tables on the inside covers <strong>and</strong> end pages concisely summarize<br />
much of the content in the book. These tables can save students<br />
the time of hunting for formulas <strong>and</strong> definitions.<br />
Notation<br />
Clear vec<strong>to</strong>r notation helps students do problems. One common class of<br />
student errors comes from copying a textbook’s printed bold vec<strong>to</strong>r F the<br />
same way as a plain-text scalar F . We reduce this error by use a redundant<br />
vec<strong>to</strong>r notation, a bold <strong>and</strong> harpooned F * .<br />
As for all authors <strong>and</strong> teachers concerned with motion in two <strong>and</strong> three<br />
dimensions we have struggled with the tradeoffs between a precise notation<br />
<strong>and</strong> a simple notation. Perfectly precise notations are complex <strong>and</strong> intimidating.<br />
Simple notations are ambiguous <strong>and</strong> hide key information. Our attempt<br />
at clarity without <strong>to</strong>o-much clutter is summarized in the box on page 40.<br />
1 For example, we use angular<br />
momentum balance (appropriately<br />
expressed) with respect <strong>to</strong> any possiblyaccelerating<br />
point, not just points<br />
selected from an arcane list.<br />
Relation <strong>to</strong> other mechanics books<br />
The bulk of the content of this book can be found in other places including<br />
freshman physics texts, other engineering texts, <strong>and</strong> hundreds of classics.<br />
Nonetheless this book is in some ways different in organization <strong>and</strong> approach.<br />
It also uses some important but not well-enough known concepts 1 .<br />
Mastery of freshman physics (e.g., from Halliday, Resnick & Walker, Tipler,