Analysis on Steering Gain and Vehicle Handling Performance with ...
Analysis on Steering Gain and Vehicle Handling Performance with ...
Analysis on Steering Gain and Vehicle Handling Performance with ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
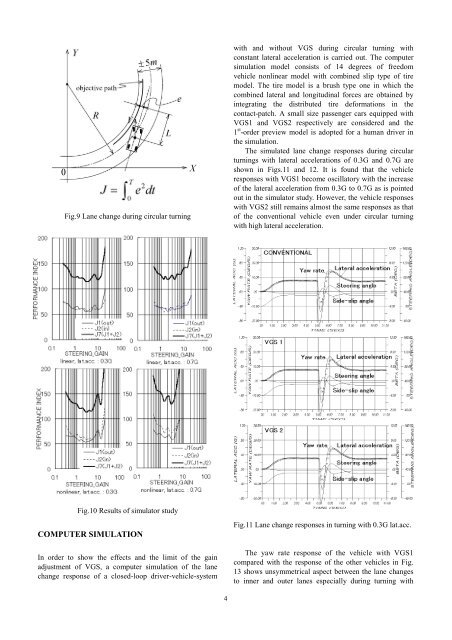
Fig.9 Lane change during circular turning<br />
<strong>with</strong> <strong>and</strong> <strong>with</strong>out VGS during circular turning <strong>with</strong><br />
c<strong>on</strong>stant lateral accelerati<strong>on</strong> is carried out. The computer<br />
simulati<strong>on</strong> model c<strong>on</strong>sists of 14 degrees of freedom<br />
vehicle n<strong>on</strong>linear model <strong>with</strong> combined slip type of tire<br />
model. The tire model is a brush type <strong>on</strong>e in which the<br />
combined lateral <strong>and</strong> l<strong>on</strong>gitudinal forces are obtained by<br />
integrating the distributed tire deformati<strong>on</strong>s in the<br />
c<strong>on</strong>tact-patch. A small size passenger cars equipped <strong>with</strong><br />
VGS1 <strong>and</strong> VGS2 respectively are c<strong>on</strong>sidered <strong>and</strong> the<br />
1 st -order preview model is adopted for a human driver in<br />
the simulati<strong>on</strong>.<br />
The simulated lane change resp<strong>on</strong>ses during circular<br />
turnings <strong>with</strong> lateral accelerati<strong>on</strong>s of 0.3G <strong>and</strong> 0.7G are<br />
shown in Figs.11 <strong>and</strong> 12. It is found that the vehicle<br />
resp<strong>on</strong>ses <strong>with</strong> VGS1 become oscillatory <strong>with</strong> the increase<br />
of the lateral accelerati<strong>on</strong> from 0.3G to 0.7G as is pointed<br />
out in the simulator study. However, the vehicle resp<strong>on</strong>ses<br />
<strong>with</strong> VGS2 still remains almost the same resp<strong>on</strong>ses as that<br />
of the c<strong>on</strong>venti<strong>on</strong>al vehicle even under circular turning<br />
<strong>with</strong> high lateral accelerati<strong>on</strong>.<br />
Fig.10 Results of simulator study<br />
COMPUTER SIMULATION<br />
In order to show the effects <strong>and</strong> the limit of the gain<br />
adjustment of VGS, a computer simulati<strong>on</strong> of the lane<br />
change resp<strong>on</strong>se of a closed-loop driver-vehicle-system<br />
Fig.11 Lane change resp<strong>on</strong>ses in turning <strong>with</strong> 0.3G lat.acc.<br />
The yaw rate resp<strong>on</strong>se of the vehicle <strong>with</strong> VGS1<br />
compared <strong>with</strong> the resp<strong>on</strong>se of the other vehicles in Fig.<br />
13 shows unsymmetrical aspect between the lane changes<br />
to inner <strong>and</strong> outer lanes especially during turning <strong>with</strong><br />
4