(ATBD) SMAP Level 1 Radar Data Products - NASA
(ATBD) SMAP Level 1 Radar Data Products - NASA
(ATBD) SMAP Level 1 Radar Data Products - NASA

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
41<br />
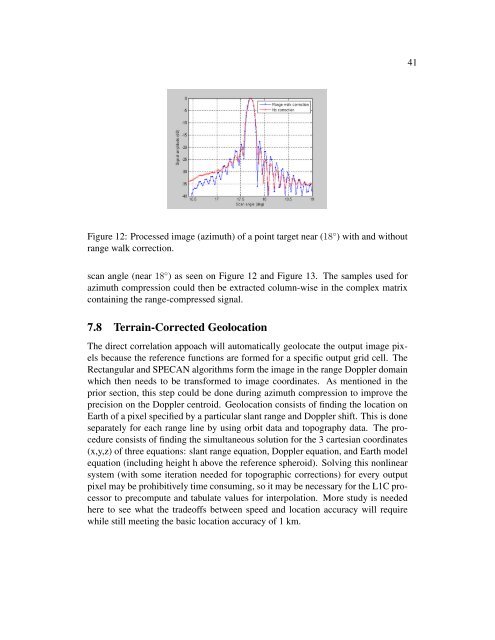
Figure 12: Processed image (azimuth) of a point target near (18 ◦ ) with and without<br />
range walk correction.<br />
scan angle (near 18 ◦ ) as seen on Figure 12 and Figure 13. The samples used for<br />
azimuth compression could then be extracted column-wise in the complex matrix<br />
containing the range-compressed signal.<br />
7.8 Terrain-Corrected Geolocation<br />
The direct correlation appoach will automatically geolocate the output image pixels<br />
because the reference functions are formed for a specific output grid cell. The<br />
Rectangular and SPECAN algorithms form the image in the range Doppler domain<br />
which then needs to be transformed to image coordinates. As mentioned in the<br />
prior section, this step could be done during azimuth compression to improve the<br />
precision on the Doppler centroid. Geolocation consists of finding the location on<br />
Earth of a pixel specified by a particular slant range and Doppler shift. This is done<br />
separately for each range line by using orbit data and topography data. The procedure<br />
consists of finding the simultaneous solution for the 3 cartesian coordinates<br />
(x,y,z) of three equations: slant range equation, Doppler equation, and Earth model<br />
equation (including height h above the reference spheroid). Solving this nonlinear<br />
system (with some iteration needed for topographic corrections) for every output<br />
pixel may be prohibitively time consuming, so it may be necessary for the L1C processor<br />
to precompute and tabulate values for interpolation. More study is needed<br />
here to see what the tradeoffs between speed and location accuracy will require<br />
while still meeting the basic location accuracy of 1 km.