Position Regulation with Feed Forward - Maxon Motor ag
Position Regulation with Feed Forward - Maxon Motor ag
Position Regulation with Feed Forward - Maxon Motor ag

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
EPOS <strong>Position</strong>ing Controller<br />
maxon motor control<br />
EPOS Application Note: <strong>Position</strong> <strong>Regulation</strong> <strong>with</strong> <strong>Feed</strong> <strong>Forward</strong><br />
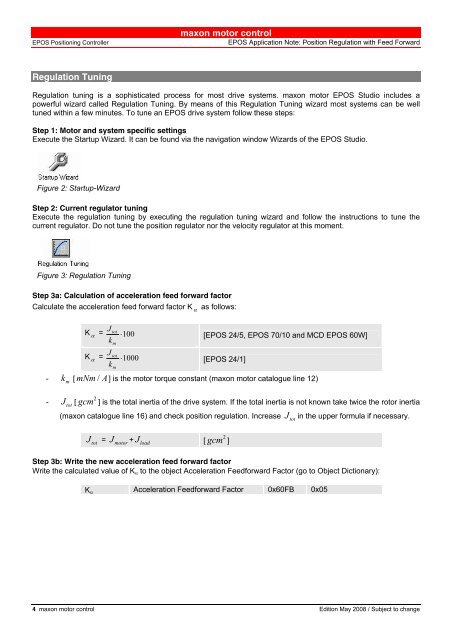
<strong>Regulation</strong> Tuning<br />
<strong>Regulation</strong> tuning is a sophisticated process for most drive systems. maxon motor EPOS Studio includes a<br />
powerful wizard called <strong>Regulation</strong> Tuning. By means of this <strong>Regulation</strong> Tuning wizard most systems can be well<br />
tuned <strong>with</strong>in a few minutes. To tune an EPOS drive system follow these steps:<br />
Step 1: <strong>Motor</strong> and system specific settings<br />
Execute the Startup Wizard. It can be found via the navigation window Wizards of the EPOS Studio.<br />
Figure 2: Startup-Wizard<br />
Step 2: Current regulator tuning<br />
Execute the regulation tuning by executing the regulation tuning wizard and follow the instructions to tune the<br />
current regulator. Do not tune the position regulator nor the velocity regulator at this moment.<br />
Figure 3: <strong>Regulation</strong> Tuning<br />
Step 3a: Calculation of acceleration feed forward factor<br />
Calculate the acceleration feed forward factor K as follows:<br />
α<br />
k<br />
J<br />
K α =<br />
tot<br />
⋅100<br />
k<br />
m<br />
J<br />
K α =<br />
tot<br />
⋅1000<br />
k<br />
m<br />
[EPOS 24/5, EPOS 70/10 and MCD EPOS 60W]<br />
[EPOS 24/1]<br />
- [ mNm / A ] is the motor torque constant (maxon motor catalogue line 12)<br />
m<br />
J tot<br />
gcm<br />
2<br />
- [ ] is the total inertia of the drive system. If the total inertia is not known take twice the rotor inertia<br />
(maxon catalogue line 16) and check position regulation. Increase<br />
J tot<br />
in the upper formula if necessary.<br />
2<br />
J = J + J [ ]<br />
tot<br />
motor<br />
load<br />
gcm<br />
Step 3b: Write the new acceleration feed forward factor<br />
Write the calculated value of K α to the object Acceleration <strong>Feed</strong>forward Factor (go to Object Dictionary):<br />
K α Acceleration <strong>Feed</strong>forward Factor 0x60FB 0x05<br />
4 maxon motor control Edition May 2008 / Subject to change