

DOOMBA ME 4451: Robotics December 14, 2010 Dr. Harvey ... - helix
DOOMBA ME 4451: Robotics December 14, 2010 Dr. Harvey ... - helix
DOOMBA ME 4451: Robotics December 14, 2010 Dr. Harvey ... - helix

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Initial Plan<br />
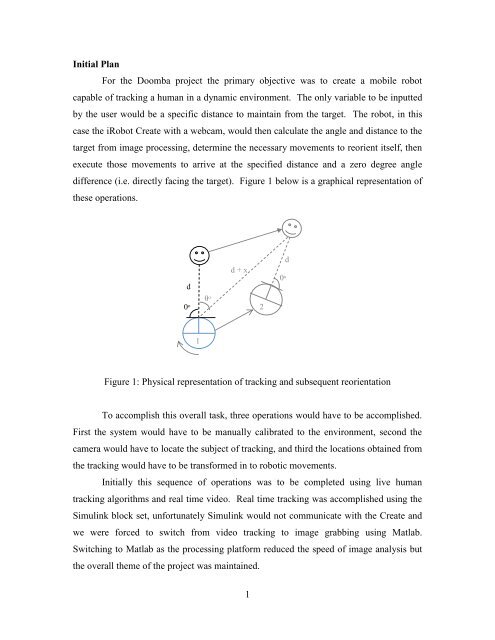
For the Doomba project the primary objective was to create a mobile robot<br />
capable of tracking a human in a dynamic environment. The only variable to be inputted<br />
by the user would be a specific distance to maintain from the target. The robot, in this<br />
case the iRobot Create with a webcam, would then calculate the angle and distance to the<br />
target from image processing, determine the necessary movements to reorient itself, then<br />
execute those movements to arrive at the specified distance and a zero degree angle<br />
difference (i.e. directly facing the target). Figure 1 below is a graphical representation of<br />
these operations.<br />
d<br />
0ᵒ<br />
θᵒ<br />
d + x<br />
2<br />
0ᵒ<br />
d<br />
1<br />
Figure 1: Physical representation of tracking and subsequent reorientation<br />
To accomplish this overall task, three operations would have to be accomplished.<br />
First the system would have to be manually calibrated to the environment, second the<br />
camera would have to locate the subject of tracking, and third the locations obtained from<br />
the tracking would have to be transformed in to robotic movements.<br />
Initially this sequence of operations was to be completed using live human<br />
tracking algorithms and real time video. Real time tracking was accomplished using the<br />
Simulink block set, unfortunately Simulink would not communicate with the Create and<br />
we were forced to switch from video tracking to image grabbing using Matlab.<br />
Switching to Matlab as the processing platform reduced the speed of image analysis but<br />
the overall theme of the project was maintained.<br />
1










