- Page 1 and 2:
CCS C Compiler Manual PCB / PCM / P
- Page 3 and 4:
Table of Contents Overview ........
- Page 5 and 6:
Table of Contents PreProcessor ....
- Page 7 and 8:
Table of Contents enable_interrupts
- Page 9 and 10:
Table of Contents read_bank( ) ....
- Page 11 and 12:
Table of Contents spi_init() ......
- Page 13 and 14:
OVERVIEW C Compiler PCB, PCM and PC
- Page 15 and 16:
Overview Directories The compiler w
- Page 17 and 18:
Overview debug file. +FS Select SXC
- Page 19 and 20:
Overview Menu All of the IDE's func
- Page 21 and 22:
Overview Debugging Windows Debugger
- Page 23 and 24:
PROGRAM SYNTAX Overall Structure A
- Page 25 and 26:
Program Syntax Sequence Same as ??=
- Page 27 and 28:
STATEMENTS Statements STATEMENT if
- Page 29 and 30:
Statements The expression is evalua
- Page 31 and 32:
Statements goto goto The goto state
- Page 33:
Statements ; Statement: ; Example:
- Page 36 and 37:
Identifiers ABCDE ID[X] ID[X][X] ID
- Page 38 and 39:
expr&expr Left to Right expr^expr L
- Page 40 and 41:
Structures & Unions typedef Named R
- Page 42 and 43:
Enumerated Types enum enumeration t
- Page 44 and 45:
SEE ALSO: Declarations, Type Specif
- Page 46 and 47:
Using Program Memory for Data CCS C
- Page 49 and 50:
FUNCTION DEFINITION Function Defini
- Page 51 and 52:
Function Definition Default Paramet
- Page 53 and 54:
FUNCTIONAL OVERVIEW I2C I2C is a po
- Page 55 and 56:
Functional Overview #DEVICE ADC=10
- Page 57 and 58:
Functional Overview can_enable_rtr(
- Page 59 and 60:
Functional Overview Relevant Prepro
- Page 61 and 62:
Functional Overview Configuration M
- Page 63 and 64:
Functional Overview Writes N bytes
- Page 65 and 66:
Functional Overview External Memory
- Page 67 and 68:
Functional Overview Relevant Interr
- Page 69 and 70:
Functional Overview be treated as a
- Page 71 and 72:
Functional Overview psp_input_full(
- Page 73 and 74:
Functional Overview Program Eeprom
- Page 75 and 76:
Functional Overview None Relevant I
- Page 77 and 78:
Functional Overview printf() or fpr
- Page 79 and 80:
Functional Overview to be enabled.
- Page 81 and 82:
Functional Overview configure the s
- Page 83 and 84:
Functional Overview Relevant Interr
- Page 85 and 86:
Functional Overview None Relevant I
- Page 87 and 88:
Functional Overview USB Universal S
- Page 89 and 90:
Functional Overview Relevant Interr
- Page 91 and 92:
Functional Overview WDT or Watch Do
- Page 93 and 94:
Functional Overview variables/const
- Page 95 and 96:
PREPROCESSOR PRE-PROCESSOR DIRECTOR
- Page 97 and 98:
PreProcessor { int8 a; int16 b; } t
- Page 99 and 100:
PreProcessor ASR.B f,W W0 = f >> 1a
- Page 101 and 102:
PreProcessor DEC Wa,Wd Wd = Wa â
- Page 103 and 104:
PreProcessor MUL.SU Wa,lit5,Wd {Wd+
- Page 105 and 106:
PreProcessor SUBR Wa,lit5,Wd Wd = l
- Page 107 and 108:
PreProcessor The compiler will set
- Page 109 and 110:
PreProcessor Examples: #byte status
- Page 111 and 112:
PreProcessor #define isequal(a,b) (
- Page 113 and 114:
PreProcessor NORETFIE to interrupt
- Page 115 and 116:
PreProcessor Note: you may NOT use
- Page 117 and 118:
PreProcessor void TimerTask(void) {
- Page 119 and 120:
PreProcessor Some processors allow
- Page 121 and 122:
PreProcessor to see if the specifie
- Page 123 and 124:
PreProcessor #INCLUDE "filename" El
- Page 125 and 126:
PreProcessor #INT_IC2QEI Input Capt
- Page 127 and 128:
PreProcessor Files: Also See: enabl
- Page 129 and 130:
PreProcessor #line Syntax: Elements
- Page 131 and 132:
PreProcessor Purpose: Stops inserti
- Page 133 and 134:
PreProcessor object file. It is an
- Page 135 and 136:
PreProcessor SCK2 SSDMA Transmit (a
- Page 137 and 138:
PreProcessor #priority Syntax: Elem
- Page 139 and 140:
PreProcessor #rom Syntax: Elements:
- Page 141 and 142:
PreProcessor the serial number. lis
- Page 143 and 144:
PreProcessor __time__ Syntax: Eleme
- Page 145 and 146:
PreProcessor #use capture Syntax: E
- Page 147 and 148:
PreProcessor type=speed option the
- Page 149 and 150:
PreProcessor SLOW RESTART_WDT FORCE
- Page 151 and 152:
PreProcessor remappable pin to firs
- Page 153 and 154:
PreProcessor MULTI_MASTER the RCV p
- Page 155 and 156:
PreProcessor not used. Purpose: Thi
- Page 157 and 158:
PreProcessor CLOCK_HIGH=n High time
- Page 159 and 160:
PreProcessor TICK=xx Sets the desir
- Page 161 and 162:
PreProcessor Examples: #USE TOUCHPA
- Page 163 and 164:
BUILT-IN FUNCTIONS BUILT-IN FUNCTIO
- Page 165 and 166:
Built-in Functions isspace(char) st
- Page 167 and 168:
Built-in Functions rtc_alarm_write(
- Page 169 and 170:
Built-in Functions Domain error occ
- Page 171 and 172:
Built-in Functions Returns: Functio
- Page 173 and 174:
Built-in Functions atoi( ) atol( )
- Page 175 and 176:
Built-in Functions bit_test( ) Synt
- Page 177 and 178:
Built-in Functions calloc( ) Syntax
- Page 179 and 180:
Built-in Functions clc1_setup_input
- Page 181 and 182:
Built-in Functions . cog_restart( )
- Page 183 and 184:
Built-in Functions delay_cycles( )
- Page 185 and 186:
Built-in Functions output_low(PIN_B
- Page 187 and 188:
Built-in Functions should have been
- Page 189 and 190:
Built-in Functions If "errno.h" is
- Page 191 and 192:
Built-in Functions Examples: printf
- Page 193 and 194:
Built-in Functions Availability: Re
- Page 195 and 196:
Built-in Functions putc( ) putchar(
- Page 197 and 198:
Built-in Functions frexp( ) Syntax:
- Page 199 and 200:
Built-in Functions Li f,g or e Matc
- Page 201 and 202:
Built-in Functions Requires: Exampl
- Page 203 and 204:
Built-in Functions Example Files: A
- Page 205 and 206:
Built-in Functions get_tris_x( ) Sy
- Page 207 and 208:
Built-in Functions INT:iiiii ID DEV
- Page 209 and 210:
Built-in Functions SPIxDO SPIxCLK E
- Page 211 and 212:
Built-in Functions ready to be read
- Page 213 and 214:
Built-in Functions i2c_poll( ) Synt
- Page 215 and 216:
Built-in Functions i2c_speed( ) Syn
- Page 217 and 218:
Built-in Functions i2c_write( ) Syn
- Page 219 and 220:
Built-in Functions Availability: Re
- Page 221 and 222:
Built-in Functions clear_interrupt,
- Page 223 and 224:
Built-in Functions Returns: Functio
- Page 225 and 226:
Built-in Functions Parameters: Retu
- Page 227 and 228:
Built-in Functions Examples: byte C
- Page 229 and 230:
Built-in Functions Requires: #INCLU
- Page 231 and 232:
Built-in Functions make32( ) Syntax
- Page 233 and 234:
Built-in Functions n is a count of
- Page 235 and 236:
Built-in Functions Also See: memcpy
- Page 237 and 238:
Built-in Functions } void main() {
- Page 239 and 240:
Built-in Functions take much longer
- Page 241 and 242:
Built-in Functions Parameters: Retu
- Page 243 and 244:
Built-in Functions Function: Availa
- Page 245 and 246:
Built-in Functions Parameters: Stri
- Page 247 and 248:
Built-in Functions Availability: Re
- Page 249 and 250:
Built-in Functions putc_send( ); fp
- Page 251 and 252:
Built-in Functions pwm_set_duty() S
- Page 253 and 254:
Built-in Functions qei_status( ) Sy
- Page 255 and 256:
Built-in Functions Function: Availa
- Page 257 and 258:
Built-in Functions Parameters: Retu
- Page 259 and 260:
Built-in Functions at 0 and the ran
- Page 261 and 262:
Built-in Functions · ADC_START_ONL
- Page 263 and 264:
Built-in Functions Function: Availa
- Page 265 and 266:
Built-in Functions Examples: Exampl
- Page 267 and 268:
Built-in Functions Availability: Re
- Page 269 and 270:
Built-in Functions Examples: Exampl
- Page 271 and 272:
Built-in Functions rtos_disable( )
- Page 273 and 274:
Built-in Functions rtos_run( ) The
- Page 275 and 276:
Built-in Functions program will con
- Page 277 and 278:
Built-in Functions Example Files: A
- Page 279 and 280:
Built-in Functions n Assigns the nu
- Page 281 and 282:
Built-in Functions set_cog_phase( )
- Page 283 and 284:
Built-in Functions set_open_drain_c
- Page 285 and 286:
Built-in Functions Returns: Functio
- Page 287 and 288:
Built-in Functions setup_sd_adc_cal
- Page 289 and 290:
Built-in Functions Function: Availa
- Page 291 and 292:
Built-in Functions Parameters: Retu
- Page 293 and 294:
Built-in Functions ADC_CLOCK_DIV_3
- Page 295 and 296:
Built-in Functions CCP_SHUTDOWN_ON_
- Page 297 and 298:
Built-in Functions Returns: Functio
- Page 299 and 300:
Built-in Functions Examples: Exampl
- Page 301 and 302:
Built-in Functions Function: Availa
- Page 303 and 304:
Built-in Functions LCD_DISABLED, L
- Page 305 and 306:
Built-in Functions setup_opamp1( )
- Page 307 and 308:
Built-in Functions increment/decrem
- Page 309 and 310:
Built-in Functions Examples: Exampl
- Page 311 and 312:
Built-in Functions Parameters: Opti
- Page 313 and 314:
Built-in Functions SDADC_GAIN_1
- Page 315 and 316:
Built-in Functions TB_DIV_32, TB_DI
- Page 317 and 318:
Built-in Functions Returns: Functio
- Page 319 and 320:
Built-in Functions T5_DIV_BY_1, T5_
- Page 321 and 322:
Built-in Functions Also See: #FUSES
- Page 323 and 324:
Built-in Functions // This shifts 8
- Page 325 and 326:
Built-in Functions spi_data_is_in(
- Page 327 and 328:
Built-in Functions will be clocked
- Page 329 and 330:
Built-in Functions spi_write( ) spi
- Page 331 and 332:
Built-in Functions Parameters: Retu
- Page 333 and 334:
Built-in Functions Returns: Functio
- Page 335 and 336:
Built-in Functions Availability: Re
- Page 337 and 338:
Built-in Functions Requires: Nothin
- Page 339 and 340:
Built-in Functions Note: If the sta
- Page 341 and 342:
Built-in Functions void main(void)
- Page 343 and 344:
Built-in Functions Examples: int fo
- Page 345 and 346: Built-in Functions Availability: Re
- Page 347 and 348: STANDARD C INCLUDE FILES errno.h er
- Page 349 and 350: Standard C Include Files CHAR_MIN:
- Page 351 and 352: ERROR MESSAGES Compiler Error Messa
- Page 353 and 354: Error Messages Expect comma Expect
- Page 355 and 356: Error Messages In the meantime if t
- Page 357 and 358: Error Messages A function and all o
- Page 359: Error Messages USE parameter value
- Page 362 and 363: Function never called Function not
- Page 365 and 366: COMMON QUESTIONS & ANSWERS How are
- Page 367 and 368: Common Questions & Answers How can
- Page 369 and 370: Common Questions & Answers This exa
- Page 371 and 372: Common Questions & Answers } set_tr
- Page 373 and 374: Common Questions & Answers How does
- Page 375 and 376: Common Questions & Answers RAM is a
- Page 377 and 378: Common Questions & Answers What is
- Page 379 and 380: Common Questions & Answers Why does
- Page 381: Common Questions & Answers If nothi
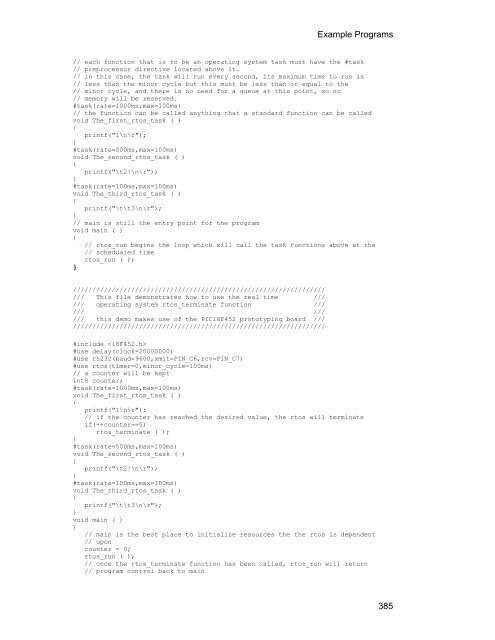
- Page 384 and 385: A stand-alone application that need
- Page 386 and 387: Serial boot loader program for chip
- Page 388 and 389: Simulates an I2C serial EEPROM show
- Page 390 and 391: Serial EEPROM functions 24256.C Ser
- Page 392 and 393: Standard C error handling for math
- Page 394 and 395: #include #endif #use delay(clock=2
- Page 398 and 399: } printf("RTOS has been terminated\
- Page 400 and 401: #use rs232(baud=9600,xmit=PIN_C6,rc
- Page 402 and 403: #use delay(clock=20000000) #use rs2
- Page 405 and 406: SOFTWARE LICENSE AGREEMENT SOFTWARE
- Page 407 and 408: INDEX # #ASM ......................
- Page 409 and 410: Index Continue ....................
- Page 411 and 412: Index LIST ........................
- Page 413 and 414: Index setup_power_pwm .............