

Pairwise Markov Random Fields and its Application in Textured ...
Pairwise Markov Random Fields and its Application in Textured ...
Pairwise Markov Random Fields and its Application in Textured ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
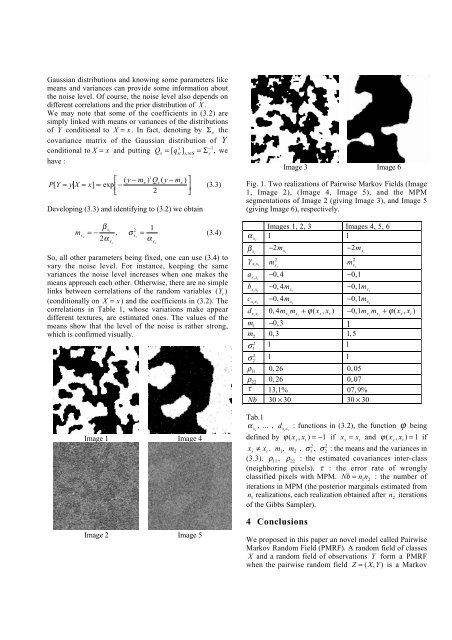
Gaussian distributions <strong>and</strong> know<strong>in</strong>g some parameters likemeans <strong>and</strong> variances can provide some <strong>in</strong>formation aboutthe noise level. Of course, the noise level also depends ondifferent correlations <strong>and</strong> the prior distribution of X .We may note that some of the coefficients <strong>in</strong> (3.2) aresimply l<strong>in</strong>ked with means or variances of the distributionsof Y conditional to X = x . In fact, denot<strong>in</strong>g by Σ xthecovariance matrix of the Gaussian distribution of Yconditional to X = x <strong>and</strong> putt<strong>in</strong>g Q x= [q x st] s,t∈S=Σ −1 x, wehave :⎡P[Y = yX= x] ∝ exp − (y − m x )t Q x(y − m x) ⎤⎢⎣ 2⎥ (3.3)⎦Develop<strong>in</strong>g (3.3) <strong>and</strong> identify<strong>in</strong>g to (3.2) we obta<strong>in</strong>Image 3 Image 6Fig. 1. Two realizations of <strong>Pairwise</strong> <strong>Markov</strong> <strong>Fields</strong> (Image1, Image 2), (Image 4, Image 5), <strong>and</strong> the MPMsegmentations of Image 2 (giv<strong>in</strong>g Image 3), <strong>and</strong> Image 5(giv<strong>in</strong>g Image 6), respectively.m xs=− β x s, σ 2 xs= 1(3.4)2α xsα xsImages 1, 2, 3 Images 4, 5, 6α xs1 1So, all other parameters be<strong>in</strong>g fixed, one can use (3.4) tovary the noise level. For <strong>in</strong>stance, keep<strong>in</strong>g the samevariances the noise level <strong>in</strong>creases when one makes themeans approach each other. Otherwise, there are no simplel<strong>in</strong>ks between correlations of the r<strong>and</strong>om variables (Y s)(conditionally on X = x ) <strong>and</strong> the coefficients <strong>in</strong> (3.2). Thecorrelations <strong>in</strong> Table 1, whose variations make appeardifferent textures, are estimated ones. The values of themeans show that the level of the noise is rather strong,which is confirmed visually.Image 1 Image 4Image 2 Image 5β xs−2m xs−2m xsγ xs x t2m xs2m xsa xs x t−0, 4 −0,1b xs x t−0, 4m xt−0,1m xtc xs x t−0, 4m xs−0,1m xsd xs x t0, 4m xsm xt+ ϕ(x s, x t) −0,1m xsm xt+ ϕ(x s, x t)m 1−0,3 1m 20,3 1,52σ 11 12σ 21 1ρ 110,26 0,05ρ 220,26 0,07τ 13,1% 07,9%Nb 30 × 30 30 × 30Tab.1α xs, ... , d xs x t: functions <strong>in</strong> (3.2), the function ϕ be<strong>in</strong>gdef<strong>in</strong>ed by ϕ(x s, x t) =−1 if x s= x t<strong>and</strong> ϕ(x s, x t) = 1 ifx s≠ x t. m 1, m 2, σ 2 1, σ 2 2: the means <strong>and</strong> the variances <strong>in</strong>(3.3). ρ 11, ρ 22: the estimated covariances <strong>in</strong>ter-class(neighbor<strong>in</strong>g pixels). τ : the error rate of wronglyclassified pixels with MPM. Nb = n 1n 2: the number ofiterations <strong>in</strong> MPM (the posterior marg<strong>in</strong>als estimated fromn 1realizations, each realization obta<strong>in</strong>ed after n 2iterationsof the Gibbs Sampler).4 ConclusionsWe proposed <strong>in</strong> this paper an novel model called <strong>Pairwise</strong><strong>Markov</strong> <strong>R<strong>and</strong>om</strong> Field (PMRF). A r<strong>and</strong>om field of classesX <strong>and</strong> a r<strong>and</strong>om field of observations Y form a PMRFwhen the pairwise r<strong>and</strong>om field Z = (X,Y) is a <strong>Markov</strong>













