

Acoustic Feedback Cancellation for hearing-aids ... - ResearchGate
Acoustic Feedback Cancellation for hearing-aids ... - ResearchGate
Acoustic Feedback Cancellation for hearing-aids ... - ResearchGate

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
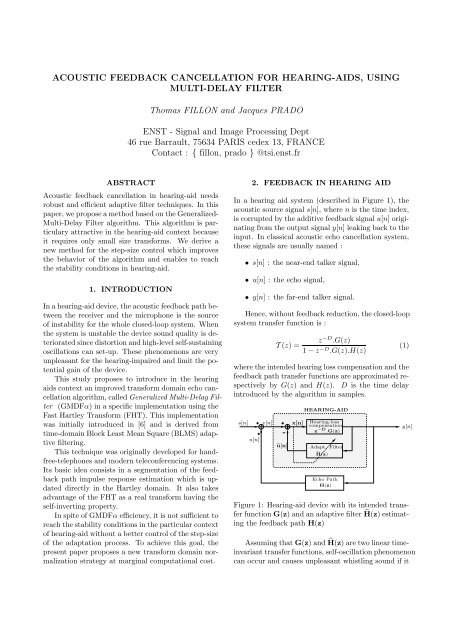
ACOUSTIC FEEDBACK CANCELLATION FOR HEARING-AIDS, USINGMULTI-DELAY FILTERThomas FILLON and Jacques PRADOENST - Signal and Image Processing Dept46 rue Barrault, 75634 PARIS cedex 13, FRANCEContact : { fillon, prado } @tsi.enst.frABSTRACT<strong>Acoustic</strong> feedback cancellation in <strong>hearing</strong>-aid needsrobust and efficient adaptive filter techniques. In thispaper, we propose a method based on the Generalized-Multi-Delay Filter algorithm. This algorithm is particularyattractive in the <strong>hearing</strong>-aid context becauseit requires only small size trans<strong>for</strong>ms. We derive anew method <strong>for</strong> the step-size control which improvesthe behavior of the algorithm and enables to reachthe stability conditions in <strong>hearing</strong>-aid.1. INTRODUCTIONIn a <strong>hearing</strong>-aid device, the acoustic feedback path betweenthe receiver and the microphone is the sourceof instability <strong>for</strong> the whole closed-loop system. Whenthe system is unstable the device sound quality is deterioratedsince distortion and high-level self-sustainingoscillations can set-up. These phenomenons are veryunpleasant <strong>for</strong> the <strong>hearing</strong>-impaired and limit the potentialgain of the device.This study proposes to introduce in the <strong>hearing</strong><strong>aids</strong> context an improved trans<strong>for</strong>m domain echo cancellationalgorithm, called Generalized Multi-Delay Filter(GMDFα) in a specific implementation using theFast Hartley Trans<strong>for</strong>m (FHT). This implementationwas initially introduced in [6] and is derived fromtime-domain Block Least Mean Square (BLMS) adaptivefiltering.This technique was originally developed <strong>for</strong> handfree-telephonesand modern teleconferencing systems.Its basic idea consists in a segmentation of the feedbackpath impulse response estimation which is updateddirectly in the Hartley domain. It also takesadvantage of the FHT as a real trans<strong>for</strong>m having theself-inverting property.In spite of GMDFα efficiency, it is not sufficient toreach the stability conditions in the particular contextof <strong>hearing</strong>-aid without a better control of the step-sizeof the adaptation process. To achieve this goal, thepresent paper proposes a new trans<strong>for</strong>m domain normalizationstrategy at marginal computational cost.2. FEEDBACK IN HEARING AIDIn a <strong>hearing</strong> aid system (described in Figure 1), theacoustic source signal s[n], where n is the time index,is corrupted by the additive feedback signal u[n] originatingfrom the output signal y[n] leaking back to theinput. In classical acoustic echo cancellation system,these signals are usually named :• s[n] : the near-end talker signal,• u[n] : the echo signal,• y[n] : the far-end talker signal.Hence, without feedback reduction, the closed-loopsystem transfer function is :T (z) =z −D .G(z)1 − z −D .G(z).H(z)(1)where the intended <strong>hearing</strong> loss compensation and thefeedback path transfer functions are approximated respectivelyby G(z) and H(z). D is the time delayintroduced by the algorithm in samples.s[n]u[n]v[n]û[n]x[n]HEARING-AIDHearing-losscompensationz −D .G(z)Adapt. FilterĤ(z)Echo PathH(z)Figure 1: Hearing-aid device with its intended transferfunction G(z) and an adaptive filter Ĥ(z) estimatingthe feedback path H(z)y[n]Assuming that G(z) and Ĥ(z) are two linear timeinvarianttransfer functions, self-oscillation phenomenoncan occur and causes unpleasant whistling sound if it
exists z on the unit circle <strong>for</strong> which :{|G(z).H(z)| > 1, andarg(G(z).H(z)) = 2mπ rad, m ∈ N.(2)According to condition (2), it is obvious that thegain provided by G(z) has to be limited in order tokeep the system in stable conditions. However limitingthe gain prevents from efficiently compensatingthe <strong>hearing</strong> loss.In the recent years, many different approaches havebeen studied to reduce acoustic feedback [2, 3, 4]. Twodifferent approaches are generally considered :• non-continuous adaptation : the adaptive feedbackcancellation filter is update only during silenceor when oscillation is detected,• continuous adaption generally based on LMSadaptive filtering.In many non-continuous schemes, a burst of pseudorandomnoise sequence is generated at the output ofthe <strong>hearing</strong>-aid in order to identify the feedback path.This article focuses on LMS-based continuous adaptationscheme according to the following reasons :• feedback path can vary between two updates• regularly switching off the system and generatingnoise can be unpleasant <strong>for</strong> the <strong>hearing</strong>impaired .LMS-based feedback cancellation systems adaptthe coefficients of the filter Ĥ(z) that estimates thefeedback signal through û[n] by minimizing, in theLeast Mean Square (LMS) sense, the error signal :x[n] = v[n] − û[n].The closed-loop system transfer function with adaptivefeedback cancellation is given by (see Fig. 1) :z −D .G(z)T (z) =) (3)1 − z −D .G(z).(H(z) − Ĥ(z)According to Equation (3), the stability conditionbecomes :()∣∣∣∣∣G(z). H(z) − Ĥ(z) < 1 (4)LMS-based algorithm have to deal with drasticconditions of use compared to classical acoustic echocancellation :• echo and source signals y[n] and s[n] are stronglycorrelated because of the closed-loop system,• acoustic environment is very varying both outsidethe ear (caused by objects or hand proximityof the ear ) and inside the ear (caused by jawor face movements),• the high gain in the device negatively balancesthe stability condition.According to this particular context, the presentpaper proposes to use an improved algorithm frommodern acoustic echo cancellation system.3. GENERALIZED MULTI-DELAY FILTERIN HARTLEY DOMAINFerrara introduced in [1] an exact and fast implementationof Block-LMS in the frequency domain whichtakes advantage of the Discrete Fourier Trans<strong>for</strong>m(DFT) circular convolution property. This methodis known as Fast LMS (FLMS).The second advantage of the FLMS is that thefrequency trans<strong>for</strong>ms coefficients are less correlatedthan in the time domain. This enables a faster andnearly uni<strong>for</strong>m convergence rate of all the modes ofthe adaptive filter.In fact, FLMS can be transposed with any trans<strong>for</strong>mshaving the circular convolution property. In [6],FLMS was exactly transposed in the Discrete HartleyTrans<strong>for</strong>m (DHT) domain.The DHT of a M-dimensional real vector x =[x 0 , . . . , x M−1 ] is closely related to the DFT and definedby :X h k = √ 1M−1∑Mm=0(x m⎧⎪ ⎩cos 2π mk ) (+ sin 2π mk )⎫⎪ ⎭MM(5)Using DHT in the context of <strong>hearing</strong> aid seemsvery attractive <strong>for</strong> the following reasons :• it is a real trans<strong>for</strong>m,• it has the self-inverting property (DHT = DHT −1 )and thus it reduces the implementing cost ofprogramming a trans<strong>for</strong>m function in the <strong>hearing</strong>device DSP chip.A modification of FLMS was initially proposed in[7]. This implementation, known as Multi-Delay Filter(MDF), consists in sectioning the impulse responseof length N in K short successive segments of lengthM. Its initial aim was to use K M-dimensional trans<strong>for</strong>msinstead of one larger N-dimensional in order todeal with large impulse responses in room acousticalenvironment. The use of short trans<strong>for</strong>m is very interestingaccording to the low computational powerand fixed-pointed arithmetic of <strong>hearing</strong> aid dedicatedDSP chips. This algorithm also enables to reduce thedelay to a correct value (10-20ms).In [5] a Weighted OverLap-Add (WOLA) versionof MDF was introduced and is known as GeneralizedMDFα (GMDFα) where α stands <strong>for</strong> the overlap factorα = M Rwhere M is the size of the trans<strong>for</strong>m and
R is the stride between two updates of the buffers. αcontrols the update rate of the adaptation process.As <strong>for</strong> the FLMS, GMDFα can be transposed toDHT domain (GMDFα-DHT) .Consequently, the present paper suggests the useof GMDFα-DHT <strong>for</strong> acoustic feedback cancellation in<strong>hearing</strong> <strong>aids</strong>. A complete description of the algorithmis given in [6].In GMDFα-DHT the time-domain tap weight vectoris divided into K segments and the algorithm directlyhandles with the M-dimensional DHT of eachsegment : H k s, k ∈ [0; K − 1].At each block index s, the update can be written :whereH k s+1 = H k s + Cµ s ⊙ (Y k s ⋆ E s ) (6)• C is a constraint matrix,• µ s is the step-size parameter which controls theconvergence of the algorithm (see definition insection 4)• Y k s is the DHT of the <strong>hearing</strong> aid output dataalso sectioned in K blocks.• E s is the DHT of the error signal which is theinput data <strong>for</strong> the <strong>hearing</strong> aid.• ⊙ is the Schür component by component product• ⋆ denotes cross-correlation equivalent operationin the Hartley domain.GMDFα-DHT is also a very flexible solution <strong>for</strong>feedback cancellation in <strong>hearing</strong>-aid. Indeed, differentstrategy could be chosen on each block and in eachfrequency bin 1 .4. NEW ADAPTATION STEP-SIZEDEFINITIONTo ensure the convergence of the adaptive filter atmarginal computational cost, simple update rules haveto be investigated. Defining a new control of the stepsizein equation (6) seems to be a good choice. Thestep-size µ s is given by :whereµ s = µ 0 T s (7)• µ 0 is constant and given by : µ 0 = 1K+1(see [5])• T s is the trans<strong>for</strong>m domain normalization vector.1 Due to the close relation between DFT and DHT, the binsof the trans<strong>for</strong>m domain are indicated as frequency binsIndeed, T s is an important parameter which controlsthe convergence of the adaptation process. It isgiven by :T s =[ 1P s,1, . . .1P s,M] T(8)where the i th spectral component P s,i is obtain byfirst order low-pass filtering of the i th power spectrumcomponent of Y s :P s+1,i = γP s,i + (1 − γ)|Y s, i| 2 , 0 < γ < 1 (9)A new definition of T s is proposed here. According tothe particular conditions in this closed-loop system,the idea behind this new normalisation strategy is toadopt a more careful adaptation rule. This may slowdown the convergence but will prevent from some bias.4.1. Minimum threshold of the Power Spectrumin Sub-bandIf P s,i has a very small value, the signal is probablycarrying no valuable in<strong>for</strong>mation in the i th frequencybin and is not properly exciting the closed-loop system.However, according to equation (8) small valuesof P s,i induce a fast adaptation of the gradient. In orderto reach a satisfactory trade-off, a new definitionof T s is proposed.Power spectral coefficients are grouped in K B subbands{B k } k∈[1;KB] and the mean spectral power ofeach subband is evaluated.P m s,k = mean {P s,i } (i∈Bk )(10)Then, in order to prevent from normalizing the gradientby small values, Ps,k m is used as a minimum threshold<strong>for</strong> the corresponding subband.T s,i = 1/max ( P s,i , Ps,km )(11)4.2. Balancing with the Error Power SpectrumIn modern acoustic echo cancellation systems, doublespeechdetectors are commonly used in order to freezethe adaptation process when the far-end talker signalis too weak or in case of double-talk situation.In the <strong>hearing</strong>-aid context, the algorithmic complexityof double-speech detectors seems to be prohibitiveaccording to the dedicated DSP chips capabilities.Nevertheless as the echo and source signalsare highly correlated, a strategy has to be proposedto slow down the adaptation process when the errorsignal power is too important.Recently, the introduction of a delay at the outputof the device has been proposed to reduce correlationbetween the echo and source signals [8]. This approachhas been integrated to the present study sinceit enables to reduce the bias in the identification of
the echo path. It should also be noticed that a delayis induced by block processing in trans<strong>for</strong>m domainalgorithms.Let us consider that the power spectrum of theerror signal reaches a high level. Two situations arethen probable :(A) the source signal s[n] is present and the algorithmwould consider it as an error. Thus, adaptationshould be slowed down.(B) the source signal is not present. Thus, the convergenceis not achieved and the adaptation shouldbe sped up.As it is impossible to determine in which situation thesystem is, a careful strategy needs to be chosen. Theproposed strategy is to balanced the normalizationvector T s with the spectrum power of both the outputsignal Y s and the error signal E s .In situation (A), this strategy would tend to slowdown the adaptation. In situation (B), it seems coherentto normalize the error signal by its own powerspectrum.As <strong>for</strong> P s , let us define the error signal power spectrumby :˜P s+1,i = γ ˜P s,i + (1 − γ)|Es, i| 2 (12){ }˜P s,k m = mean ˜Ps,i(i∈B k )(13)The new definition of the normalization vector thusbecomes :⎧ ( ( )⎫T s,i = 1/ ⎩ max Ps,i , Ps,k) m + ρ. maxm ˜Ps,i , ˜P s,k ⎭(14)Where ρ is a parameter which balances the relativeimportance of P s and ˜P s .5. SIMULATION RESULTSComputer simulations were conducted to evaluate theefficiency of the GMDF α-DHT algorithm in reducingacoustic feedback.GMDF α-DHT was also compared to the proposedimplementation with a novel stepsize parameter controlaccording to the previous section.Two different impulse responses measurements ofIn-The-Ear <strong>hearing</strong> aid devices were used (see Figure2). These impulse responses have been normalizedto exactly reach the critical stability value.Figures (3) and (4) present the results throughspectrogram comparaisons. A 5s speech sentence atthe sampling rate of 16kHz was used as the sourcesignal and the impulse response models were switchedat the middle of the duration in order to simulatea fast change in the feedback path. The simulateddB0.10−0.1−0.20−20−4020 40 60 80 100 120Samples−600 1000 2000 3000 4000 5000 6000 7000 8000Frequency (Hz)Figure 2: Impulses responses and their respectivepower spectrum<strong>hearing</strong>-aid gain was static and set respectively to 5dBand 15dB in experiments illustrated in Figures (3)and (4).With the gain set to 5dB (see Figure 3), the originalGMDF α-DHT implementation prevents efficientlyfrom self-oscillations until the switch between the impulseresponses (top of the figure). This switch causesinstability and self-oscillations <strong>for</strong> about 2s. After thisrelatively long time of convergence, the adaptive filtercomes back to a stable solution without any selfoscillation.In same conditions, with the novel stepsizedefinition, no self-oscillation occurs even at theswitch time (see bottom of the figure).In the second test, with the gain set to 15dB, acomplete instability of the system can be observed<strong>for</strong> the original GMDF α-DHT implementation (seetop of Figure 4). In the same test condition, the novelstrategy prevents from system instability. Sound qualityis quite the same than in the previous test withthe same algorithm.According to these experiments, the novel strategyappears to efficiently improve the behavior ofthe GMDF α-DHT.Similar results have been observed with many differentset-up. Notably, high gain values can be providedwith a compression stage in the <strong>hearing</strong>-aid. Indeednon-linearities in the <strong>hearing</strong>-loss compensationstage of the device (see Fig. 1) improve the decorrelationof the source and echo signals and thus improvethe feedback path estimation.Independently of sound quality and distortion, noself-oscillation phenomenon occurs in experiments conductedwith higher gain values when the new step-sizedefinition is used. However, further studies are neededin order to defined properly the right gain margin <strong>for</strong><strong>hearing</strong>-aid device provided by the proposed feedbackcancellation algorithm.













