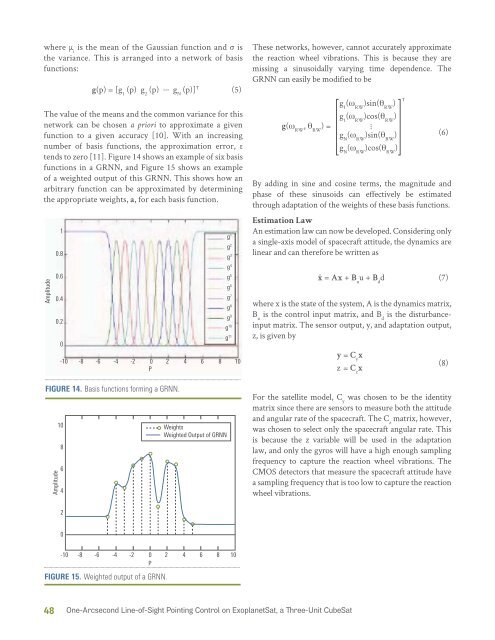
where μ iis the mean of the Gaussian function and σ isthe variance. This is arranged into a network of basisfunctions:g(p) = [g 1(p) g 2(p) ... g N(p)] T (5)<strong>The</strong> value of the means and the common variance for thisnetwork can be chosen a priori to approximate a givenfunction to a given accuracy [10]. With an increasingnumber of basis functions, the approximation error, εtends to zero [11]. Figure 14 shows an example of six basisfunctions in a GRNN, and Figure 15 shows an exampleof a weighted output of this GRNN. This shows how anarbitrary function can be approximated by determiningthe appropriate weights, a, for each basis function.AmplitudeAmplitude10.80.60.40.20-10 -8 -6 -4 -2 0 2 4 6 8 10PFIGURE 14. Basis functions forming a GRNN.10864WeightsWeighted Output of GRNNg 1g 2g 3g 4g 5g 6g 7g 8g 9g 10g 11<strong>The</strong>se networks, however, cannot accurately approximatethe reaction wheel vibrations. This is because they aremissing a sinusoidally varying time dependence. <strong>The</strong>GRNN can easily be modified to beg( RW, RW) =g 1( RW)sin( RW) Tg 1( RW)cos( RW)...g N( RW)sin( RW)g N( RW)cos( RW)By adding in sine and cosine terms, the magnitude andphase of these sinusoids can effectively be estimatedthrough adaptation of the weights of these basis functions.Estimation LawAn estimation law can now be developed. Considering onlya single-axis model of spacecraft attitude, the dynamics arelinear and can therefore be written as(6)ẋ = Ax + B uu + B dd (7)where x is the state of the system, A is the dynamics matrix,B uis the control input matrix, and B dis the disturbanceinputmatrix. <strong>The</strong> sensor output, y, and adaptation output,z, is given byy = C yxz = C zxFor the satellite model, C ywas chosen to be the identitymatrix since there are sensors to measure both the attitudeand angular rate of the spacecraft. <strong>The</strong> C zmatrix, however,was chosen to select only the spacecraft angular rate. Thisis because the z variable will be used in the adaptationlaw, and only the gyros will have a high enough samplingfrequency to capture the reaction wheel vibrations. <strong>The</strong>CMOS detectors that measure the spacecraft attitude havea sampling frequency that is too low to capture the reactionwheel vibrations.(8)20-10 -8 -6 -4 -2 0 2 4 6 8 10PFIGURE 15. Weighted output of a GRNN.48 One-Arcsecond Line-of-Sight Pointing Control on ExoplanetSat, a Three-Unit CubeSat
Given this linear system and assuming that the disturbanceinput is known, the estimator can be designed with thefollowing dynamics.x = (A – LC y) x + B uu + B da T g( RW, RW) + Lyz = C zx<strong>The</strong> estimator gain matrix, L, can be selected with standardlinear techniques such as pole placement or linear quadraticestimator techniques. This would ensure that the estimatordynamics, given by the matrix A-LC y, is stable. If thedisturbance were known exactly, the estimator wouldbe stable since the disturbance is known to be a boundedinput. However, the disturbance is not exactly known. <strong>The</strong>disturbance is d a T g(ω RW,θ RW). <strong>The</strong> true values of a arenot known exactly and therefore continuously estimatedby a weight vector estimate, â, which is generated by theadaptation law described below.Adaptation LawAn adaptation law, which updates the estimates of theweights of the GRNN, â, must be developed to ensurestability of the estimator. To do this, first, an error signalis defined as the difference between the adaptation outputof the system and the adaptation output of the estimator:(9)e= z – z (10)It can be shown that this error signal can be written as[12]e = H(s) T g( RW, RW) (11)where H(s) is the error transfer function defined asH(s) = C z(sI – A + LC y) –1 B d(12)and = â – a. Equation (10) defines a well-known errorsignal, which has associated provably stable adaptationlaws [12], [13]. If the error transfer function is strictlypositive real (SPR), the following adaptation law can beuseda . = –eg( RW, RW) (13)where η > 0 is the learning rate. If the error transferfunction is not SPR, the following adaptation can be usedwherea . = –H(s)g( RW, RW) (14) = e + a T H(s)g( RW, RW) – H(s)a T g( RW, RW) (15)This adaptation law results in a slower adaptation since thesignals are filtered through H(s). <strong>The</strong> second adaptationlaw was chosen since the error transfer function wasnot SPR. <strong>The</strong> stability proof is a Lyapunov-based proofthat shows that a transformed error signal goes to zerodue to a positive definite Lyapunov-like function and anassociated negative semidefinite time derivative [12].ResultsA simulation of the spacecraft with the adaptiveestimator was developed. <strong>The</strong> simulation was run withthe reaction wheel speed being swept linearly from 900to 1100 back to 900 rpm with a period of 200 s. With atotal simulation time of 1000 s, the reaction wheel speedrange is swept through 10 times. In addition, a lightlydamped resonance was added at 16 Hz (~1000 rpm) tomake the problem a little more difficult.One-Arcsecond Line-of-Sight Pointing Control on ExoplanetSat, a Three-Unit CubeSat49
- Page 3: The Draper Technology Digest (CSDL-
- Page 11 and 12: AvionicsBolometerPIPayloadGPS Radio
- Page 13: HUMAN SPACE PROGRAMSApolloFrom the
- Page 18: System Cmd/ObjDescriptionScriptSour
- Page 21 and 22: HOW SMALL SPACE CAN ENABLEOPERATION
- Page 24 and 25: Science RequirementsThe primary per
- Page 26 and 27: The other end houses the payload, w
- Page 28: operations. For a thorough discussi
- Page 31: REFERENCES1. Mayor, M. and D. Quelo
- Page 35 and 36: TABLE 1. Space-Rated Gyro Compariso
- Page 37 and 38: FIGURE 5. Apollo 14 astronaut Ed Mi
- Page 40 and 41: Christopher M. Pong, Matthew W. Smi
- Page 43 and 44: SensorsActuatorsSoftware1-kHz Sampl
- Page 45: Adapter plateKistler tableFIGURE 6.
- Page 48: and actuators to measure and cancel
- Page 55 and 56: REFERENCES1. Piterman, A. and Z. Ni
- Page 57 and 58: Office of the Chief Technologist pr
- Page 60 and 61: designer must balance the needs for
- Page 62 and 63: to select the type and number of sc
- Page 64: Small Space Authors’ BiographiesN
- Page 67 and 68: The 2011 Draper DistinguishedPerfor
- Page 69: performance, and vendor quality iss
- Page 74 and 75: RESULTSFigure 4 shows current volta
- Page 76 and 77: Authors’ BiographiesJonathan J. B
- Page 78: The 2011 EngineeringVice President
- Page 81 and 82: Sharon G. Kujawa, Ph.D., is an Asso
- Page 83 and 84: Jason FieringExcellence in Innovati
- Page 85 and 86: Peter CastelliOutstanding Task Lead
- Page 87 and 88: Michael ClohecyOutstanding Task Lea
- Page 89: Rick StonerHoward Musoff Student Me
- Page 92 and 93: Deutsch, O.L.; Antelman, E.T.; Peli
- Page 94 and 95: Kniazeva, T.; Hsiao, J.C.; Charest,
- Page 97 and 98: Smith, M.W.; Seager, S.; Pong, C.M.
- Page 99 and 100:
List of 2011 Patents IssuedBarrows,
- Page 101:
Ko, C.W.; Supervisors: Tao, S.; Liv