
You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
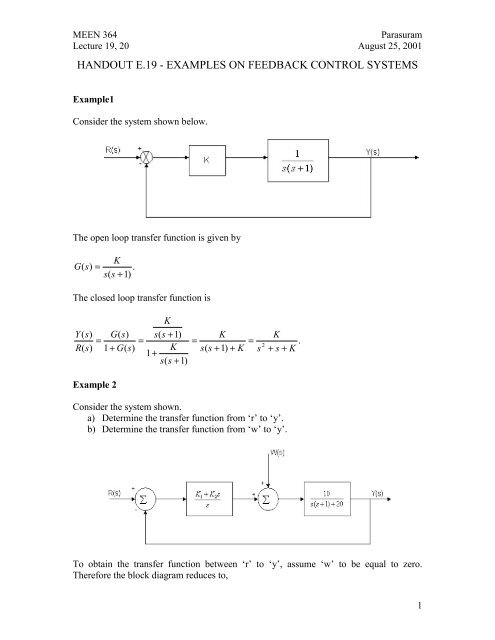
MEEN 364ParasuramLecture 19, 20 August 25, 2001HANDOUT E.19 - <strong>EXAMPLES</strong> <strong>ON</strong> <strong>FEEDBACK</strong> C<strong>ON</strong>TROL <strong>SYSTEMS</strong>Example1Consider the system shown below.The open loop transfer function is given byG(s)=K.s(s + 1)The closed loop transfer function isY(s)R(s)G(s)=1+G(s)Ks(s + 1)=K1+s(s + 1)=Ks(s + 1) + K=s2K.+ s + KExample 2Consider the system shown.a) Determine the transfer function from ‘r’ to ‘y’.b) Determine the transfer function from ‘w’ to ‘y’.To obtain the transfer function between ‘r’ to ‘y’, assume ‘w’ to be equal to zero.Therefore the block diagram reduces to,1
MEEN 364ParasuramLecture 19, 20 August 25, 2001Hence the open loop transfer function is( KG s)=+ Kss)10 10( K1+ K2s)⋅=.s(s + 1) + 20 s(s + s + 20)1 2(2The closed loop transfer function is given byY(s)R(s)G(s)=1+G(s)10( K1+ K s)2s(s + s + 20)=10( K1+ K2s)1+2s(s + s + 20)2=s3+ s210( K1+ K s)2+ s(20+ 10K2) + 10K1.To obtain the transfer function between ‘w’ and ‘y’, assume ‘r’ to be equal to zero. Hencethe block diagram reduces to,For the above block diagram the open loop transfer function is10 10G( s)==2s(s + 1) + 20 s + s + 20and the feedback transfer function is given byK1+ K2sH ( s)= .sTherefore the transfer function from ‘w’ to ‘y’ is given by2
MEEN 364ParasuramLecture 19, 20 August 25, 2001Y ( s)W ( s)G(s)=1+G(s)H ( s)=1+( s2102( s + s + 20)10 K⋅+ s + 20)1+ K2ss=( s3+ s210s+ s(20+ 10K2) + 10K1.)Example 3A unity feedback system has the open loop transfer functions + 1G( s)= .3 2s + sFind the error constants K p , K v and K a for the system.The closed loop transfer function is given asY(s)R(s)G(s)=1+G(s)s + 13 2=s + ss + 11+3s + s2=s3s + 1.2+ s + s + 1The transfer function for the error signal is given by3 2s + 1s + sE( s)= R(s)− Y(s)= R(s)−R(s)=R(s).3 23 2s + s + s + 1 s + s + s + 1Therefore the steady state error for the system can be obtained by applying the final valuetheorem asess= lim sE(s).s−>0Therefore,ess3 2s + s= lim sR(s).s−>0 3 2s + s + s + 1For a unit step input, we have R ( s)= 1 , therefore the steady state error iss3 23 2s + s 1 s + s1ess= lim s ⋅⋅ = lim= 0 = .s−>0 3 23 2s + s + s + 1 s s−>0 s + s + s + 1 1+KTherefore the value of K p is given asp3
MEEN 364ParasuramLecture 19, 20 August 25, 2001K p→ ∞.For a ramp input, we have R ( s)= 12 , therefore the steady state error iss3 22s + s 1 s + sess= lim s.. = lim= 0 =s−>0 3 223 2s + s + s + 1 s s−>0 s + s + s + 11Kv.Hence the value of K v is given asK v→ ∞.For a parabolic input, we have R ( s)= 13 , therefore the steady state error iss3 2s + s 1 s + 1ess= lim s.. = lim= 1 =s−>0 3 233 2s + s + s + 1 s s−>0 s + s + s + 11Ka.Therefore,K a= 1.Example 4The block diagram shown below shows a control system in which the output member ofthe system is subject to a disturbance. In the absence of a disturbance, the output is equalto the reference. Investigate the response of this system to a unit step disturbance.Since we are interested in the response of the system to a unit step disturbance, assumethe reference input to be equal to zero. Therefore the block diagram reduces to4
MEEN 364ParasuramLecture 19, 20 August 25, 2001H ( s)= h,with h > 0. Determine the system type with respect to the reference input.The closed loop transfer function is given asY(s)R(s)G(s)=1+G(s)H ( s)1s(1+ Ts)=h1+s(1+ Ts)=Ts21.+ s + hThe transfer function for the error signal is given by2⎛ 1 ⎞ Ts + s + h −1E( s)= R(s)− Y(s)= ⎜1−R(s)R(s).2⎟ =2⎝ Ts + s + h ⎠ Ts + s + hThe steady state error is obtained asess2Ts + s + h −1= lim s ⋅ E(s)= lim s ⋅R(s).s−>0s−>0 2Ts + s + hFor a step reference input, the error isess22Ts + s + h −11 Ts + s + h −1h −1= lim s ⋅⋅ = lim= .s−>0 20 2Ts + s + h s s−>Ts + s + h hIf the system is not unity feedback then, h ≠ 1, therefore the system is of Type 0. If thesystem is unity feedback, i.e., h = 1, then the system is of Type 1 as the steady state errorfor the step reference input is zero.6
MEEN 364ParasuramLecture 19, 20 August 25, 2001Assignment1) Consider a unity feedback system whose open loop transfer function is given by( s + 1)G( s)=.2s(s + 2s+ 5)Determine the closed loop transfer function of the system.2) Problem 4.32a from the textbook “ Feedback control of dynamic systems”, by Franklinet.al.Recommended Reading“Feedback Control of Dynamic Systems” 4 th Edition, by Gene F. Franklin et.al – pp 201– 215, 230 – 242.Recommended Assignment“Feedback Control of Dynamic Systems” 4 th Edition, by Gene F. Franklin et.al –problems 4.22, 4.28, 4.33, 4.35, 4.37.7