T - IfB
T - IfB
T - IfB

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
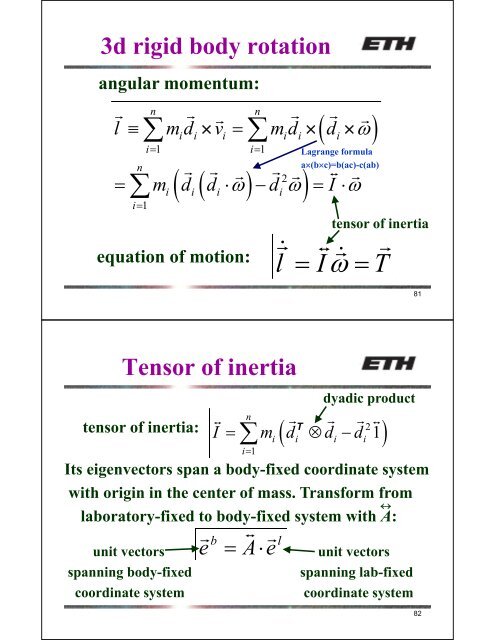
3d rigid body rotationangular momentum: n n l md v md d i1i i i i i ii1 i1n m d d d I a(bc)=b(ac)-c(ab)2i i ii equation of motion:Lagrange formulatensor of inertial I T81Tensor of inertiatensor of inertia:I m d d dn2 1Ti i i ii1Its eigenvectors span a body-fixed coordinate systemwith origin in the center of mass. Transform fromlaboratory-fixed to body-fixed system with A:unit vectorsspanning body-fixedcoordinate systemeb Aeldyadic productunit vectorsspanning lab-fixedcoordinate system82