The spectrum of delay-differential equations: numerical methods - KTH
The spectrum of delay-differential equations: numerical methods - KTH
The spectrum of delay-differential equations: numerical methods - KTH

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
40 Chapter 2. Computing the <strong>spectrum</strong><br />
Let x(t) be a solution to (2.35) and u(t, θ) := x(t + θ). We now have that<br />
∂u<br />
∂θ<br />
= ∂u<br />
∂t<br />
since x(t + θ) is symmetric with respect to t and θ. It remains to show that<br />
the boundary condition holds. Note that u ′ θ (t, 0) = ˙x(t), and hence u′ θ (t, 0) =<br />
A0x(t) + A1x(t − τ) = A0u(t, 0) + A1u(t, −τ).<br />
<strong>The</strong> converse is proven next. Suppose u(t, θ) is a solution to (2.36) and let<br />
x(t) := u(t, 0) for t ≥ 0. From (2.36) it follows that ˙x(t) = u ′ t(t, 0) = u ′ θ (t, 0) =<br />
A0u(t, 0) + A1u(t, −τ) = A0x(t) + A1x(t − τ). �<br />
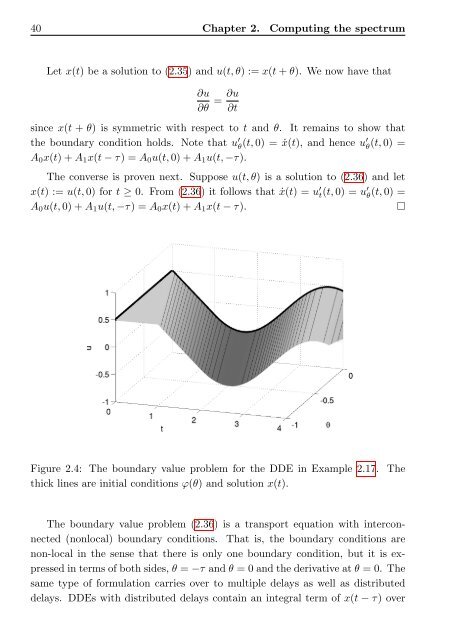
Figure 2.4: <strong>The</strong> boundary value problem for the DDE in Example 2.17. <strong>The</strong><br />
thick lines are initial conditions ϕ(θ) and solution x(t).<br />
<strong>The</strong> boundary value problem (2.36) is a transport equation with interconnected<br />
(nonlocal) boundary conditions. That is, the boundary conditions are<br />
non-local in the sense that there is only one boundary condition, but it is expressed<br />
in terms <strong>of</strong> both sides, θ = −τ and θ = 0 and the derivative at θ = 0. <strong>The</strong><br />
same type <strong>of</strong> formulation carries over to multiple <strong>delay</strong>s as well as distributed<br />
<strong>delay</strong>s. DDEs with distributed <strong>delay</strong>s contain an integral term <strong>of</strong> x(t − τ) over