Hybrid Systems - Part I - Chess
Hybrid Systems - Part I - Chess
Hybrid Systems - Part I - Chess

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
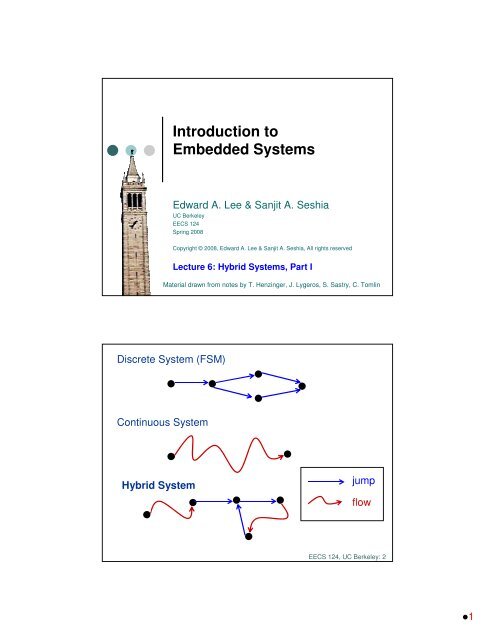
Introduction toEmbedded <strong>Systems</strong>Edward A. Lee & Sanjit A. SeshiaUC BerkeleyEECS 124Spring 2008Copyright © 2008, Edward A. Lee & Sanjit A. Seshia, All rights reservedLecture 6: <strong>Hybrid</strong> <strong>Systems</strong>, <strong>Part</strong> IMaterial drawn from notes by T. Henzinger, J. Lygeros, S. Sastry, C. TomlinDiscrete System (FSM)Continuous System<strong>Hybrid</strong> SystemjumpflowEECS 124, UC Berkeley: 21
Topics in Today’s Lecture Examples of <strong>Hybrid</strong> <strong>Systems</strong> The <strong>Hybrid</strong> Automaton Model properties of this kind of model Next time: focus on special case called TimedAutomata (TA), and bisimulation of TA with FSMEECS 124, UC Berkeley: 3A Thermostat(happen instantaneously)EECS 124, UC Berkeley: 42
Dynamics of Thermostatx82807068onofftEECS 124, UC Berkeley: 5<strong>Hybrid</strong> Automaton for ThermostatIs this automaton deterministic?EECS 124, UC Berkeley: 63
Formal Representation of <strong>Hybrid</strong> AutomatonEECS 124, UC Berkeley: 7Where do <strong>Hybrid</strong> <strong>Systems</strong> arise? Digital controller of physical “plant” thermostat intelligent cruise control in cars aircraft auto pilot Phased operation of natural phenomena bouncing ball biological cell growth Multi-agent systems ground and air transportation systems interacting robots (e.g., RoboSoccer)EECS 124, UC Berkeley: 84
<strong>Hybrid</strong> Automaton for Bouncing Ballx – vertical distance from ground (position)v – velocityc – coefficient of restitution, 0 c 1EECS 124, UC Berkeley: 9Simulation of Bouncing Ball Automaton:Plot position x as a function of time tWhat kind of plot would you expect?EECS 124, UC Berkeley: 105
Simulation of Bouncing Ball Automaton inPtolemy II / HyVisualEECS 124, UC Berkeley: 11Zeno BehaviorInformally:The system makes an infinite number of jumpsin finite timeEECS 124, UC Berkeley: 126
A Run/Execution of a <strong>Hybrid</strong> AutomatontimeEECS 124, UC Berkeley: 13Zeno Behavior: Formal DefinitiontimeEECS 124, UC Berkeley: 147
Analysis of Zeno Behavior of Bouncing BallEECS 124, UC Berkeley: 15Why does Zeno Behavior Arise?Our model is a mathematical artifactZeno behavior is mathematically possible, but it isinfeasible in the real, physical worldPoints to some unrealistic assumption in the modelEECS 124, UC Berkeley: 168
<strong>Hybrid</strong> Automaton for Bouncing Ball: What’sUnrealistic about this model?x – vertical distancev – velocityc – coefficient of restitution, 0 c 1EECS 124, UC Berkeley: 17Eliminating Zeno Behavior: RegularizationAn instantaneous mode change (jump) is unrealisticWhat happens as ε goes to 0?EECS 124, UC Berkeley: 189
Simulation for ε = 0.3EECS 124, UC Berkeley: 19Simulation for ε = 0.15EECS 124, UC Berkeley: 2010
Exercise: Construct a <strong>Hybrid</strong> Automaton Model ofiRobot Hill ClimberEECS 124, UC Berkeley: 2111