Monte Carlo Particle Transport Methods: Neutron and Photon - gnssn
Monte Carlo Particle Transport Methods: Neutron and Photon - gnssn
Monte Carlo Particle Transport Methods: Neutron and Photon - gnssn

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Library of Congress Cataloging-in-Pubiicatioii DataLux, I.<strong>Monte</strong> <strong>Carlo</strong> particle transport methods: neutron <strong>and</strong> photoncalculations/authors, Ivan Lux <strong>and</strong> Laszlo Koblinger.p. cm.Includes bibliographical references <strong>and</strong> index.ISBN 0-8493-6074-91. <strong>Neutron</strong> transport theory. 2. <strong>Photon</strong> transport theory.3. <strong>Monte</strong> <strong>Carlo</strong> method. I. Koblinger, Laszlo. II. Title.QC793.5.N4628L88 1990530.1 '38—dc20 90-2108CIPThis book represents information obtained from authentic <strong>and</strong> highly regarded sources. Reprinted material isquoted with permission, <strong>and</strong> sources are indicated. A wide variety of references are listed. Every reasonable efforthas been made to give reliable data <strong>and</strong> information, but the author <strong>and</strong> the publisher cannot assume responsibilityfor the validity of all materials or for the consequences of their use.All rights reserved. This book, or any parts thereof, may not be reproduced in any form without written consentfrom the publisher.Direct all inquiries to CRC Press. Inc.. 2000 Corporate Blvd., N.W., Boca Raton, Florida 33431.« 1991 by CRC Press, Inc.International St<strong>and</strong>ard Book Number 0-8493-6074-9Library of Congress Card Number 90-2108Printed in the United States
PREFACEWith this book we try to reach several more-or-iess unattainable goalsnamely• To comprise in a single book ali the most important achievements of Menucalculations for solving neutron <strong>and</strong> photon transport problems;• To present a book which discusses the same topics in the three levels known kliterature;• To write a book which gives useful informati< i i
III. Statistical Considerations • • 62A. The Central Limit Theorem 63B. The Actual Computations . 63C The Efficiency 65Appendix 3A:Energy Selection from the Klein-Nishina Formula 65A. Combination of the Direct Sampling <strong>and</strong>Rejection Techniques — 66B. The Carlson Method 68Appendix 3B:Thermal <strong>Neutron</strong> Energy Selection 69A. Selection from the Maxwellian Distribution 69B. New Energy Selection from the Differential Thermal<strong>Neutron</strong> Cross-Section 70Appendix 3C:Fission <strong>Neutron</strong> Energy Selection .....71Appendix 3D:Angle Selection for Anisotropic Scatterings 73A. Table Look up Method 75B. Sampling from Linear Anisotropic Angular Distribution 75C. Application of the Rejection Technique for the LegeodreExpansion 77D. Selection of Discrete Angles from the Legendre Expansion — 77References... • - 79Chapter 4Collision Density <strong>and</strong> Importance Equations <strong>and</strong> Their Solution by<strong>Monte</strong> <strong>Carlo</strong> 81I. <strong>Monte</strong> <strong>Carlo</strong> Calculation of Integrals ...............81A. Two Basic Ways for Solving One-DimensionalIntegrals — ................................81B. Generalization to Multi-Dimensional Cases.................. — , 83C. Integration Domains of Complicated Shape 83D. Convergence of Numerical Integration <strong>Methods</strong>....... 85II. Elementary Variance Reducing Techniques — — 86A. Mean <strong>and</strong> Variance, in Straightforward Sampling 86B. Importance Sampling .... — 87C. Systematic Sampling 89D. Quota Sampling - — ,. 90E. Use of Expected Values — , .,.. 9 JF. Correlated Sampling 92G. Further <strong>Methods</strong> 93III. Solution of Fredholm-Type Integral Equations 93A. Introduction 93B. Fredholm-Type Integral Equations, Functionals to beDetermined — ..... — .. 94C. Expansion into Neumann Series <strong>and</strong> Solution by<strong>Monte</strong> <strong>Carlo</strong> 94
D. Kernel Distortion, Importance Sampling 96IV. Collision Density Equations • 98A. Definition of the Collision Densities 99B. Definition of the Transition <strong>and</strong> Collision Kernels 100C. The Equations Connecting the Collision Densities 101D. The Theory of the Step-By-Step Solution of the CollisionDensity Equations 103E. Normalizations of the Transition <strong>and</strong> Collision Kernels 104F. Termination of the <strong>Monte</strong> <strong>Carlo</strong> Cycle 107V. Scoring 108A. General Formulation of the Reaction Rates 108B. Estimation of More than One Response 108C. <strong>Monte</strong> <strong>Carlo</strong> Estimation of the Responses 109D. Examples of Pay-Off Functions 110VI. Three Special Problems 119A. Path Stretching (Exponential Transformation) 119B. Perturbation <strong>Monte</strong> <strong>Carlo</strong> 121C Criticality Studies 125VII. Adjoint <strong>Monte</strong> <strong>Carlo</strong> 126A. The Value Equations • 127B. Solution of the Value Equations (Adjoint <strong>Monte</strong> <strong>Carlo</strong>) — 129C. Sampling the Adjoint Source 130D. The Collision Kernel of the Value Equation 131E. Scoring in the Adjoint <strong>Monte</strong> <strong>Carlo</strong> 134F. Contributions of the Uncollided <strong>Particle</strong>s 137VIII. Variances 138A. Variance Estimates by the Moment Equations 139B. The Value Used as Importance Function — 141References. 141Chapter 5The Moment Equations 143I. Introductory Remarks • • • • • 143A. Relation of the Expected Score to the AdjointCollision Density 145B. Conditions of Existence <strong>and</strong> Uniqueness 146C. Analog <strong>and</strong> Nonanolog Simulation — 149D. Definitions <strong>and</strong> Notations 151E. Heuristic Interpretation of the Moment Equations 155II. Moment Equations in Nonmultiplying Games 158A. Score Probability Equations — . — 158B. Moment of a General Score Function 160C Special Cases: Expectation <strong>and</strong> Second Moment ofthe Score 163D. An Analytical Example 166III. Extension to Multiplying Games 169A. Score Probability Equation 170B. Expectation <strong>and</strong> Second Moment 171C. An Equivalent Nonmultiplying Game 173D. Splitting: When a Nonmultiplying Game is Played asa Multiplying One. 178E. Alternative Forms of the Collision Kernel 182
IV. Further Generalizations — 183A. Interruption <strong>and</strong> Restart of a Free Flight .... — 1.84B. Geometrical Splitting — ...186C. Score Probabilities in a General Time-Independent Game 192D. Inclusion of Time Dependence — — 193V. Analysis of the First-Moment Equation 196A. Unbiased Estimators — 197B. Weight Generation Rules 199C. A Nonanolog Game Without Statistical Weights:Importance Sampling 203D. Generalized Exponential Transformation 207E. Path Stretching ,. 212F. Computing Time <strong>and</strong> Number of Events per History .213G. Feasibility of a Nonanolog Game .216H. Delta Scattering 222VI. Partially Unbiased Estimators 226A. Transformation Theorems — .. 228B. Commonly Used Estimators ,231C. Analysis of Variances in the Straight-AheadScattering Model — . 236VII. Approximate Solutions of the Moment Equations 239A. The Simplified Model 240B. The Separation Assumption 241C. On the Quality of the Approximation 244D. Effect of Surroundings 246VIII. Analysis of Second Moment Equations —.. 249A. Zero-Variance Schemes — ............................ 250B. On the Boundedness of the Variance 258C Sufficient Conditions of Variance Reduction byNonanolog Games — 260D. Examples: Survival Biasing <strong>and</strong> ELP <strong>and</strong> MELP <strong>Methods</strong> 263E. Variance <strong>and</strong> Efficiency of the Equivalent NonmultiplyingGame 265F. Zero-Variance Partially Unbiased Estimators:The Minimum-Variance Composed Estimator 271G. Relative Merits of the Common Estimators..... — 275H. The Self-Improving Estimator 280I. Variance Versus Efficiency in a Nonanalog Game 283J. Optimization of Source Distribution ....... 284IX. Miscellaneous Specific Moment Equations 286A. Estimation of Bilinear Forms 287B. Correlation of Estimators — 289C Moment-Generating Equation 290D. Coupled Multiparticle Simulation — 290Appendix 5A:Solution of the Moment Equations in the Forward/Backward Model 294Appendix 5 B:Second Moments of Multiple Convolutions 297
Appendix 5C:Solution of the Moment Equations in the Straight-AheadScattering Model 300References 301Chapter 6Special Games 305I. Correlated <strong>Monte</strong> <strong>Carlo</strong>: Perturbation Calculations 305A. Correlated Moment Equations 307B. Feasibility of a Correlated Game 311C Correlated Difference Estimators 314D. Variance of the Correlated Score Difference 315E. Examples <strong>and</strong> Special Techniques 321F. Perturbation Source Method 324G. Parametric Perturbations: Integral <strong>Monte</strong> <strong>Carlo</strong>. 327II. Differential <strong>Monte</strong> <strong>Carlo</strong>: Sensitivity Analysis 328A. Estimation of First-Order Derivatives — 329B. Discussion of the Game 332C. Data Adjustment with Sensitivites 336D. Estimation of Higher-Order Derivatives 338E. A Simple Example 340F. Extension to Parameter Dependent Estimators 343G. Perturbation Estimation by Differential Games: The TaylorSeries Approach 344III. Criticality Calculations • • 346A. Principle of the Simulation: The Source Iteration 3471. First Method 3472. Second Method 3503. Third Method 3514. Fourth Method 354B. On the Convergence of the Source Iteration 355C. Practical Realizations — - 357D. Variance of the Estimated Multiplication Factor 362E. A One-Step Scheme: Acceleration of the Iteration 364F. Reactivity Change Due to Perturbations 367G. Parametric Derivatives of k eff376IV. Estimation of Flux at a Certain Point 377A. The Next-Event Point Estimator 378B. Confidence Limits for Singular Estimators 382C Point Estimators with First-Order Singularity 386D. Bounded-Variance Point Estimators 391E. Practical Modifications of the Basic <strong>Methods</strong> 394V. Specific Problems in Statistical Evaluation ..399A. Optimum Combination of Sample Means 399B. Unbiased Estimation of Combined Variance fromSmall Sample Sets 406C Estimation of a Common Mean from Rare Sets 411D. Estimation of the Combined Variance of Rare Sets 416E. Estimation of Ratio of Expectations 419F. On the Determination of Theoretical Variances 426
Appendix 6A:Unbiased Estimation of Criticality Reaction Sates 43«Appendix 6B:Accuracy of the Corrected Variance from Small Sample Sets .. 43Appendix 6C:Expectation of the Matrix ARA .......... — . — — , 43Appendix 6D:Empirical Third Moments - • - — • • • •4*References — 44Chapter 7Optimization of Efficiency-Increasing Techniques 44I. Simple Examples of Optimization <strong>Methods</strong>A. Optimum Splitting Schemes in the Straight-Ahead Mode!B. Optimization of Path Stretching in the Straight-Ahead Model ......C. Approximate Optimization of the Russian Roulette ParameterD. Optimization by Direct Statistical Approach — ....................II. Optimization of Geometrical SplittingA. Geometrical Splitting in Terms of Regional Importances............B. A Simple MethodC. Properties <strong>and</strong> Refinements of the Method .........................D. The Continuous Splitting Model — . — ......................1:4 Optimization of the Continuous Splitting Scheme ..................F. Practical RealizationsG. The Weight-Window TechniqueIII. Optimization of Path Stretching -A. Zero-Variance Path-Stretching Schemes ..... —....... — .........B. Discussion of the Schemes ..... —C Practical Applications in Deep Penetration Calculations —........D. Special Problems Associated with the Method 506Appendix 7A:Approximate Moments of the Number of Transmitted <strong>Particle</strong>sThrough Multilayer Slabs 508References — .309Index 513
!Chapter 1SCOPE AND STRUCTURE OF THE BOOK<strong>Monte</strong> <strong>Carlo</strong> methods are being efficiently used for solving widely varying types ofphysical problems. Although <strong>Monte</strong> <strong>Carlo</strong> is trivially a straightforward tool to stimuhiter<strong>and</strong>om processes, it can also be used for solving problems that have no immediate probabilisticinterpretation.The first inventions of the method go back very far in history, 4however, extensiveapplications came along with the construction <strong>and</strong> use of modem digital computers, i r,from the late 1940s.Historically, the <strong>Monte</strong> <strong>Carlo</strong> method has first been successfully used to solve particletransport problems <strong>and</strong> this is still one of the areas of most extensive use 'The general method was originally developed by Fermi, UI am, <strong>and</strong> von i . un
2 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationsby a little bit more mathematics, the introduction of several more advanced techniques (suchas the adjoint treatment) becomes possible.in Chapter 5 the whole treatment is based on the moment equations. The investigationof the equations that govern various moments of the <strong>Monte</strong> <strong>Carlo</strong> estimates are extremelyhelpful for increasing the efficiency of the methods.Special games (correlated, perturbation <strong>and</strong> differential <strong>Monte</strong> <strong>Carlo</strong>; cnticality <strong>and</strong> fluxat a point calculations) are discussed in Chapter 6 — based on the mathematical treatmentintroduced in the previous part.The last Chapter is devoted to optimization of the techniques (splitting, path stretching,Russian roulette, etc.) widely used in deep-penetration <strong>Monte</strong> <strong>Carlo</strong> calculations.Our intention was to compile the book in such a way that readers whose interest extendsjust to the depth of the first or to the second level, are provided with a concise <strong>and</strong> easilyintelligible treatise of all the necessary tools for preparing <strong>Monte</strong> <strong>Carlo</strong> programs <strong>and</strong> solvingproblems. Though the real novelties are necessarily subjects of the later Chapters. we dohope that the reader can find new approaches, or descriptions of well-known techniquesfrom a new, <strong>and</strong> hopefully interesting, point of view even in the first Chapters.We also hope that the underst<strong>and</strong>ing of the first level treatment will trigger out thecuriosity of many readers to start to study the second <strong>and</strong> even further, the third level.Readers of the last three Chapters become familiar with the complete set of the mostsophisticated weapons of the <strong>Monte</strong> <strong>Carlo</strong> arsenal.An essential feature of the book is that the same nomenclature <strong>and</strong> a unified notationis used throughout the different Chapters, wherever possible.Cross references between the various levels (particularly from higher levels to lowerones) make it obvious for the reader that the different approaches represent different projectionsof the very same physical phenomena.References are given at the end of each Chapter, therefore, several basic sources arelisted more than once in the book. From our point of view, such repetitions are not unnecessary,but rather make the reader's orientation easier.It is clear for us that the inclusion of all the knowledge accumulated during 4 decadesby a lot of scientists is impossible. Apart from the limitation mentioned already in the titleof the book, i.e., that we deal only with transport of neutrons <strong>and</strong> photons, the most seriousstipulation is that with very few exceptions, the whole treatment is restricted to timeindependent,or steady-state problems. There are also many minor points not treated, forexample we do not discuss the construction <strong>and</strong> tests of the basic r<strong>and</strong>om number generators.In these cases the reader is directed to the literature.REFERENCES1. Carter, 1.. I., <strong>and</strong> Cashwell, E. I).. <strong>Particle</strong>-<strong>Transport</strong> Simulation with the <strong>Monte</strong> <strong>Carlo</strong> Method. ERDACrit. Rev. Ser., National Technical Information Service, Springfield, MA, 1975.2. Cashwell, E. D. <strong>and</strong> Everett, C. J., A Practical Manual on the <strong>Monte</strong> <strong>Carlo</strong> Method for R<strong>and</strong>om WalkProblems, Pergamon Press, London, 1959.3. Ermakov, S, M. <strong>and</strong> Mikhailov, G. A., Course of Statistical Modelling (in Russian), Nauka, Moscow,1976.4. IIaltnn. J. H., A Retrospective <strong>and</strong> Prospective Survey of the <strong>Monte</strong> <strong>Carlo</strong> Method, StAM Rev., 12, 1,1970.5. Hammersley, J. M. <strong>and</strong> H<strong>and</strong>scomb, 1). C., <strong>Monte</strong> <strong>Carlo</strong> <strong>Methods</strong>, John Wiley & Sons, New York,1964.6. Kahn, H., Applications of <strong>Monte</strong> <strong>Carlo</strong>. AECU-3259 Report, R<strong>and</strong> Corporation, Santa Monica, CA, 1954.
7. Shreider, Y. A., Ed,, Method statisticheskih ispytani (<strong>Monte</strong> <strong>Carlo</strong>) (in Russian) Fizmatgiz, Moscow(1961) — German translation: Die <strong>Monte</strong> <strong>Carlo</strong> Methode und ihre Verwirklichung mit elektronischerDigitalrechnem. B.b. Teubner Verlags gesellschaft, Leipzig, 1964. —English translation: The <strong>Monte</strong> CarkMethod, Pergamon Press, New York, 1966.8. Sobol, I. M., The <strong>Monte</strong> <strong>Carlo</strong> Calculational Method, (in Russian), Nauka, Moscow, 1973.9. Spanier, J. <strong>and</strong> Gelbard, E. M., <strong>Monte</strong> <strong>Carlo</strong> Principles <strong>and</strong> <strong>Neutron</strong> <strong>Transport</strong> Problems, AddisonWesley, Reading, MA, 1969.10. Stevens, P. M. <strong>and</strong>Trubey, D. K., <strong>Methods</strong> for Calculating <strong>Neutron</strong> <strong>and</strong> Gamma-ray Attenuation. Weapon.Radiation Shielding H<strong>and</strong>book, Report DNA-1892-3, Nuclear Defense Agency, Washington, D.C., 1972Chap. 3.11. Wood, J., Computational <strong>Methods</strong> in Reactor Shielding, Pergamon Press, Oxford, 1982.
Chapter 2INTRODUCTIONWhen we started to think about writing a book on <strong>Monte</strong> <strong>Carlo</strong> techniques for neutron<strong>and</strong> photon transport calculations it was clear that in the very first sentence a nice definitionof the <strong>Monte</strong> <strong>Carlo</strong> method itself should be given. This task seemed to be very easy: justhave a look on the earlier textbooks <strong>and</strong> copy the well-established definition! However, afterreading more <strong>and</strong> more introductions it became more <strong>and</strong> more hopeless to find this sentence.Instead of exact definitions we have rather found illustrations <strong>and</strong> examples.In the book, which is the most sophisticated earlier description of the <strong>Monte</strong> <strong>Carlo</strong>applications on neutron transport, 33the authors, J. Spanier <strong>and</strong> E. M. Gelbard frankly confessthat they found "it difficult to construct a definition which characterizes the <strong>Monte</strong> <strong>Carlo</strong>method accurately, completely <strong>and</strong> concisely". Their next sentence, however, already catchesa basic feature of <strong>Monte</strong> <strong>Carlo</strong>, namely that "this method, in all its forms, involves somesort of r<strong>and</strong>om sampling process". And, really, r<strong>and</strong>om is the only word obligatorilycontained in all definitions.Anyhow, after listing our excuses, we cannot avoid giving our definition, which maynot be accurate, complete, <strong>and</strong> concise, but can help the reader begin to have a rough imageabout the method.In all applications of the <strong>Monte</strong> <strong>Carlo</strong> method a stochastic model is constructed in whichthe expected value of a certain r<strong>and</strong>om variable (or of a combination of several variables)is equivalent to the value of a physical quantity to be determined. This expected value isthen estimated by the average of several independent samples representing the r<strong>and</strong>omvariable introduced above. For the construction of the series of independent samples, r<strong>and</strong>omnumbers following the distributions of the variable to be estimated are used.There are two requirements imbedded in this definition, viz.:First, a stochastic model adequate to the problem has to be constructed. Secondly, inthe actual <strong>Monte</strong> <strong>Carlo</strong> calculations, the user has to be able to select r<strong>and</strong>om numbers withvarious distributions.There are basically two different ways to construct a stochastic model. In certain cases— as in particle transport, the topics of this book — the physical process is per se stochastic<strong>and</strong> thus the most straightforward <strong>Monte</strong> <strong>Carlo</strong> calculation is simply a numerical (or computer)simulation of the real physical events. Such direct simulations are called analog <strong>Monte</strong> <strong>Carlo</strong>games. When the computational process deviates more or less from the one-to-one simulationof the actual physical process, the game is called nonanalog. The distinction is not alwaysclear. Several authors tolerate small deviations <strong>and</strong> still call simulations slightly differingfrom the straightforward one analog. (In our book at the beginning the strictness of thisdistinction has no importance, however, from Chapter 5 on, the term "analog" is usedexclusively for the really analog simulations.)The other extreme case is when the stochastic model is constructed artificially, just forsolving deterministic equations by <strong>Monte</strong> <strong>Carlo</strong>.In the simulation of a physically stochastic process, two expected values: that of thephysical quantity <strong>and</strong> that of the average of r<strong>and</strong>om samples, must equal one another. Bothexpected values have their own variances, which may have no direct relationship. In thecorrect solution of a deterministic problem, the expected value of the r<strong>and</strong>om sample averageequals the real value of the quantity in question which is not accompanied by any statisticaluncertainty.Though the distinction between the two cases described above is clear, in transport,calculations one can seldom — or rather never — find algorithms or computer codes basedpurely on one-to-one simulation of the physical processes, <strong>and</strong> — on the other h<strong>and</strong> — in
6 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationsthe procedures derived for solving the deterministic equations of the expected values (generallycollision densities), one can still find many resemblances to a particle's r<strong>and</strong>om walk.Here we have again attained one of the aims of this book: we should like to illustrate withas many examples as possible that heuristically introduced plausible modifications of thesimple simulations lead to techniques, the validity of which can be mathematically correctlyproved by analysis of the deterministic transport equations. The opposite statement is notalways true, there are special procedures which are hardly underst<strong>and</strong>able heuristically.An immediate question arises: why are refined nonanalog methods worked out, if weknow that an accurate, analog simulation of the real physical process does not necessarilyserve us with correct results? The answer is very simple: to save computer time. In thephysical experiments millions of particles are usually emitted from the source <strong>and</strong> only asmall fraction of them is observed by a receptor (the word receptor is used hereafter in amost general sense, it may be, e.g., a physical detector, a cell in a reactor core, an organin a human body). In the computation — even on the fastest machine — the simulations ofall the interreactions of so many particles is impossible within reasonable running times.The use of less source particles may result in a very small number (none, in the extreme)of them reaching the receptor, thus causing very poor statistics, i.e., nonconfident results.This answer directly involves a precondition against the nonanalog techniques: they are worthapplication only if they decrease the computer time as compared to that of the analogsimulation, assuming that the statistical uncertainties are the same in the two cases. Needlessto say the first precondition is that the result, the expected value of the physical quantity tobe determined in any accepted nonanalog technique, must be the same as in the physicalreality or in the direct simulation of the process.The second requirement for building <strong>Monte</strong> <strong>Carlo</strong> games is the ability to select theproper r<strong>and</strong>om numbers.This is the topic of the next sections.I. SAMPLING PROBABILITY DISTRIBUTIONSIn most practical cases, sampling of any probability distribution is based on samplingone or more r<strong>and</strong>om number(s) uniformly distributed (or equidistributed) over the interval(0,1) (hereafter: r<strong>and</strong>om number) <strong>and</strong> on a transformation of it (them).The probability density function (PDF) of the r<strong>and</strong>om numbers is:if o i < iotherwisethe expected value is:<strong>and</strong> the variance is:D(O {M(f) - [M©! 2 } 1/2Since
thus,As it is proved" — <strong>and</strong> is so pLiiivblt rn < >< > >derivation — an n digit binary ran Iwn • m >1 1digits after the binary point. Since in , u\ cii , i m . inot fill in continuously the (0,1) inte v, * JI ' mthe really r<strong>and</strong>om <strong>and</strong> therefore neui iep ate ) s< . ie ttiri i> ir<strong>and</strong>om numbers uniformly distributed on (0,1). In the n a i < ioi iused transformation methods are overviewed.Many special techniques are listed in the very early r>' j > r. '> ' >of particles after collisions) are described in the appendi< < « i > ru piBefore turning to the summary of the most common 1 i j falso heuristically obvious <strong>and</strong> is often met in conjunctioi « it • .. u / i i i imethods.Theorem 2.1 — Let p,, p 2, . . . ,p„ be probabilities of the e,, e 2, . . . ,e nmutuallyexclusive events <strong>and</strong> assume that:111 ]For the selection of one of the discrete events let us first select a r<strong>and</strong>om number 0 equidistributedon (0,1). Then the event e, is selected if the inequalityis fulfilled.P 1+ + P,- , 5 5 P < P 1+ ••• +- P, AlA)
8 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> CalculationsProof, The proof of the selection rule is quite straightforward since the probability that thevalue of p is betweenS p,a n dE p,is JUStp|,•For selecting a value of a continuous r<strong>and</strong>om variable, a number of techniques aredescribed in the following section. We assume that the r<strong>and</strong>om variable has a probabilitydensity function so thatp(0 -=s 0 <strong>and</strong> J p(0 d£ = 1A. THE INVERSE DISTRIBUTION METHODTheorem 2.2 — If p(x) is the PDF of a variable x, a «: x < b, then an x value determinedby the relationsP = P(x) = I p(x) dx( 2 0 )x = P'(P)falls with a frequency p(x)dx between x <strong>and</strong> x + dx, i.e. if p, (i = 1,2,... ,n) areindependent r<strong>and</strong>om numbers then the x, = P " '(Pi) values are independent realizations ofthe x r<strong>and</strong>om variable. Shortly, we can say that X;'s are selected from p(x).*Proof. Let us denote the probability that a selected x is less than x„ by P'(x < x ()). Thenfrom Equation (2.2)P'(x
9B. THE PROBABILITY MIXING METHODTheorem 2,3 — If the PDF p(x) can be broken up to the sum of n non-negative functions:P(x) '= P/X), p,(x) ^ 0, a .< bthen sampling can be realized by a two-step procedure. First, the i-th term is seie
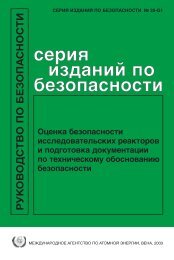
10 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> CalculationsFIGURE 2. i.Illustration of the rejection technique.Proof. (Before we present the proof, it is worth noting that the correctness of the procedureis plausible from the graphical explanation in Figure 2.1.)The probability density function of x is the conditional density of x given thatP 2
11It is easy to prove 15by summing up the probabilities of accepting the sample after= 1,2... trials that the average number of trials, ft isn = —EThere are many different ways to improve the efficiency of the rejection procedure.Theorem 2.5 — More generally, 3if one can write p(x) in the formp(x) = Cg(x)f(x) (2.5)where f(x) is also a PDF <strong>and</strong> C is chosen such that the0 =£ g(x) s= !inequality holds for a « x $ b (i.e. Cg(x) is a majorant of p(x), see Figure 2.1), then thefollowing procedure can be applied:• select an x value from f(x)• select a r<strong>and</strong>om number p• accept x if <strong>and</strong> only ifPgWProof. The conditional density (q) of x, given that p < g(x), isf(x) £ L
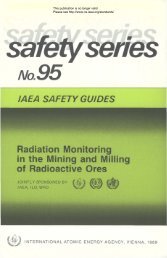
12 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationsc.d.f./ equally probableintervals (x ](x 14.i)* midpoints (x,)X nxFIGURE 2.2.A sketch of the table lookup method.wherep,(x) = Mp 2(x) = p(x) -Msampling from M 1is straightforward <strong>and</strong> the efficiency of the rejection is increased toE =(b a)(M M1 )Furthermore, the lower limit M 1can also be set differently to different subintervals,thus further improving the efficiency.The actual measure, how far we can proceed in taking out simple parts of a complicatedPDF depends partly on the computer time balance (how much time we gain by improvingthe rejection efficiency <strong>and</strong> how much we lose by setting more <strong>and</strong> more criteria). Moreover,there may be some programs where even the shape of the actual distribution changes duringthe computation <strong>and</strong> thus only very loose criteria can be set in advance.A generalization for the rejection technique for PDFs that can be exp<strong>and</strong>ed into McLaurinseries is given by Lux, 20 where an "iterative rejection" method is proposed in which —roughly speaking — the g(x) <strong>and</strong> f(x) functions of Equation (2.5) are changed after eachunsuccessful trial.D, THE TABLE LOOKUP METHODOne of the fastest, though trivially approximate, selection methods applicable for arbitrarydistribution is the table lookup method, where midpoints of equally probable intervalsof the variable to be selected are picked up r<strong>and</strong>omly from a table (Figure 2.2).The table here contains the x coordinates of the finite number midpoints from which anactual value is selected with equal probabilities.The accuracy of this method is improved by increasing the number of intervals (n),which in turn increases both the core requirement <strong>and</strong> the selection time. Another easy wayfor improvement is applied if the midpoints are not just the middle of the intervals:
13but the most probable values:x, = p(x)dxx,., , - x, J*,In case of complicated density functions the determination of the limits of the equalprobability intervals themselves may be complicated <strong>and</strong> time consuming, however, one hasto bear in mind that this task is to be solved only once for a given PDF.Another restriction is that the method cannot be applied direct'functions defined over an infinite domain since the tail of the distributfif a table of finite dimensions is used. There are several cases whenbe overcome by tricky methods. A nice example was proposed b)(described in Reference 22) for the exponential distribution.Here, the PDF isp(x) = e "<strong>and</strong> samples can very easily be obtained by solution of the inverse distribution Equation(2.2),*x = P '(p) = -lnp (2 6)however, the execution of logarithm is very time consuming.Instead, let us write the realization of x in the formx = k • ln2 - z (2.7)where k > 0 <strong>and</strong> 0 < z =s ln2. Let us select a r<strong>and</strong>om number p <strong>and</strong> determine a value ksuch that2-x ^p=S 2" ( k f "It can be seen 30that choosing k in this way the cumulative distribution function of z inEquation (2.7) readsP(z) = e - 1 0 < z «: ]n2Since the r<strong>and</strong>om variable z is defined over a finite interval it can be selected by tablelookup <strong>and</strong> the z value so selected along with the integer k value above determines theexponentially distributed r<strong>and</strong>om variable x according to Equation (2.7).An actual realization of the above procedure is detailed in Reference 22.E. SELECTION FROM POWER FUNCTIONSLet p(x) = (n + l)x" O=Sx=Sl (2.8)* Here, the term (1-p) derived from Equation 2.2 is replaced by p since both are equidistributed on (0,1).
14 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationsthus the CDF isP(x) ' p(x)dx = X 1 1 ' 1Joi.e., the direct inverse distribution method can be applied, a r<strong>and</strong>om sample x is obtainableby Equation (2.2):p = x" M x = p"">*-o (2.9)This method is not fast enough in most computers since the execution of the a boperationis quite slow if b is not an integer. Therefore, if n is an integer, the following method canreplace the execution of Equation (2.9).Theorem 2.6 — Let x (the sample) be the maximum of n + 1 r<strong>and</strong>om numbers, thenthe x is a representative sample from Equation (2.8).Proof: The probability, that a r<strong>and</strong>om number p, is equal or less than x c(0 =£ x„ =£ 1) isjust X 0. The probability that all r<strong>and</strong>om numbers from a set of n + 1 independent element isless than x„ isN t 1P(Pi " x„, p 2x„,...,P 11+1X 0) = n (p, x L))i = iN +1=n x ()=1x 01=i•In the method proposed here, a set of n + 1 r<strong>and</strong>om numbers has to be generated. Inmost computers the generation of the elementary r<strong>and</strong>om numbers is much faster than theexecution of Equation (2.7), however, especially for large values of n. it might be advisedto check the actual computer times before the selection of one of the two procedures.If x is equidistributed on (a,b) then the transformation /. - - (x - a)/(b - a) should firstbe applied.F. SAMPLING FROM THE NORMAL DISTRIBUTIONFrom the positive half of the Gaussian distribution,p(x) = - exp(-x 2 /2) (2.9)"Y TTa simple rejection method is given in Reference 15:let: x' - "1OgP 1y = - iogp 2accept x' if, <strong>and</strong> only if
IS<strong>and</strong> give a r<strong>and</strong>om sign (by the use of a third r<strong>and</strong>om number) to x':x =s-x+ 1.if p, ^0.5- 1.if p 3< 0,5The efficiency of this procedure is fairly high:exp( - 1/2) =-= 0,76Approximate Gaussian PDF sampling can be rctheorem: according to which the sum of a large n " it 1 j * .! •>distributed r<strong>and</strong>om variables (with finite variance) is t >'i i> >uiiis• j n lb i.the X 1variables are uniformly distributed on (0,1), then ih> a i. - : n I ,JKwith a variance ofV'12then x = Xf„ i x, is asymptotically (n -» 00 ) normally distributed with a residual expectedvalue ofna„ = an = -<strong>and</strong> a variance ofs„ = Vn-sTherefore, if samples from a normal distribution with a - 0, s ~ I (Equation 2.9) haveto be generated then the(2.10)rule is to be applied, with n -*
16 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> CalculationswhereThe fastest procedure 27which is completely accurate <strong>and</strong> does not need considerablestorage was recommended by Marsaglia et al. 24It works basically with the probability mixingmethod (see Section LEi., of this Chapter). The normal distribution is composed of threeterms where the first two have the major contributions <strong>and</strong> are very simple <strong>and</strong> easy tosample. Actually, in about 86%' of the selections three, in a further 11% two r<strong>and</strong>om numbershave to be summed as in Equation (2.10) <strong>and</strong> only in less than 3% is a rather complicatedalgorithm used.The flow chart of this procedure is given in Figure 2.3.Many procedures for generating normally distributed r<strong>and</strong>om numbers are collected <strong>and</strong>compared in the paper of Ahrens <strong>and</strong> Dieter 1 <strong>and</strong> Kinderman <strong>and</strong> Ramage. 18G. EFFICIENT SELECTIONS FROM THE EXPONENTIAL DISTRIBUTIONThe simplest method for selecting r<strong>and</strong>om variables from the exponential distributionis to use the inverse solution, as given by Equation (2.6). A faster method was alreadydescribed in Section 1.1). Other rapid but generally large storage-requiring methods basedalso on the use of tables prepared in advance are elaborated by Marsaglia 23 2 3<strong>and</strong> Ahrens<strong>and</strong> Dieter. 1Von Neumann 29suggested a simple rejection technique, the scheme of which is givenin Figure 2.4.The efficiencies of the different selection methods are compared in Reference 1.H. THE USE OF THE FIRST DERIVATIVE OF THE PDFLux 20presented a special method that uses the first derivative of the density functionto be sampled. The procedures suggested in his paper originate from two theorems, viz.:Theorem 2.7 — Let p(x) be a continuous PDF on (0,A) <strong>and</strong> let(i) p(x) = 0 if X=SO or x > A(ii)dp(x)dx= p (x) be continuous on (0,A)Gd) g(y) = ~ |ctp(y) + p'(y)Kl - exp[a(y - A)] 0, if 0 y < a (2.11)where a is an arbitrary real number. Thus, g(y) is again a PDF <strong>and</strong> if Tj is a sample fromg(y) thenI = --- ln[e aT| - (e-'" 1 - e ° A )p] (2.12)ais a sample from p(x).
18 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationsi =0
19After substitution <strong>and</strong> integration one getsP 6(X) = p(x)LiTheorem 2.8 — Let p(x) again be a PDF continuous for x > 0 <strong>and</strong> continuous fromthe right at x = 0 <strong>and</strong> let:(i) p(x) = 0, if x < 0(ii) p'(x) continuous, if x > 0(iii) g(y) = - [ap(y) + p'(y)J( S - e"") =¾ 0, if y ^ 0a(iv) Hm p(y)e'" -•• 0where a is again an arbitrary real number. The g(y) defined in this way is again a PDF <strong>and</strong>if T] is a sample from g(y) then£ = - - In[I -(1 - 6""L)Plais a sample from p(x).The proof is analogous to that of Theorem 2.7. <strong>and</strong> is thus not detailed here.Several illustrative applications of the above theorems are given in the original papeiof Lux, 20here we call the attention of the reader to one only which fits to our special field:If in Theorem 2.7 a is set to unity <strong>and</strong> A tends to infinity, then from Equation (2.1 \ )g(y) = p(y) +p'(y)<strong>and</strong> if g(y) is non-negative then according to Equation (2.12)£ = — lnp + T)This selection procedure was first recommended by Mikhailov 2 " for sampling of .¾.-.fission neutron spectrum <strong>and</strong> the Maxwell energy distribution.I. SELECTING RANDOM VECTORSVery often, a r<strong>and</strong>om vector of an n dimensional phase space (that is n coa r<strong>and</strong>om point) has to be selected. In the simplest cases the multidimensionaldistribution can be factorized into a product of one dimensional PDFs of mutuallyr<strong>and</strong>om variables.A simple example of it for n = 2 is the selection of points in a square:Here both £ <strong>and</strong> t| arje equidistributed on (0,1) <strong>and</strong> their representative values x <strong>and</strong> ycan be set by the use of two successive r<strong>and</strong>om numbers:x = P.y = P 2
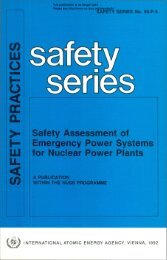
20 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculations>x,y0 1 xFIGURK 2.5.A r<strong>and</strong>om point in a square."I1LV-1HGURIi 2.().Selection of a r<strong>and</strong>om unit vector in two dimensions.If the PDFs cannot be separated for the variables (i.e., the borders of the domain arecomplicated) generally only the rejection technique works.Let the n-dimensional domain — from which the samples are to be taken — be definedby the relationF ( £ , O =£0<strong>and</strong> a, =¾ £ « b, for i == 1, 2 . . . ,n then select x,'s withx, = a, + (D 1- a,)p,<strong>and</strong> accept the point (a,, a 2, . . . a„) if <strong>and</strong> only ifF(x,.,X 2,...,X n) 0J. SELECTING TWO- AND THREE-DIMENSIONAL MANDOMORIENTATIONSThere are practically no transport codes where there is no need for the generation ofr<strong>and</strong>omly oriented two- <strong>and</strong>/or three-dimensional unit vectors.In two dimensions, according to the notation in Figure 2.6, the connection between theCartesian coordinates <strong>and</strong> the angle up is£ =COSTP
21<strong>and</strong>T) - sincp<strong>and</strong> cp is equidistributed in (0,2tt).Thus, for the r<strong>and</strong>om selection of the two coordinates a quite straightforward methodis given by:IP =2lTp<strong>and</strong>y = cos
22 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculations<strong>and</strong>(2.15)The efficiency is trivially the ratio of the circle to the square areas, i.e.,V. - - 0.7854Though the straightforward procedure (2.13) seems to be much simpler than (2.15), inmost computers both the generation of r<strong>and</strong>om numbers <strong>and</strong> the execution of the otherelementary operations of (2.12) are less time consuming than the evaluation of the sine <strong>and</strong>cosine of an angle.If not a unit vector, but rather a point from the circle area has to be selected then Equation(2.13) should be supplemented byr = max(p,,p 2)(since: p(r) = 2r dr) <strong>and</strong> x <strong>and</strong> y should be multiplied by r.In the rejection method Equation (2.14) gives directly the necessary coordinates (thereis no need for normalization), thus its preference to the direct method in Equation (2.12) iseven more obvious.In three dimension the coordinates of a r<strong>and</strong>om unit vector are 31Z =(i)x = Vl — w 2 coscpy = Vl — w 2 sincpwhere w is equidistributed on (—1,1) <strong>and</strong> coscp <strong>and</strong> sincp can be generated by one of themethods listed above.A point from inside of a sphere can again be selected by the rejection method, wherethe sphere is boxed in a cube. The efficiency here is the ratio of the sphere to the cubevolumes:E = - = 0.5236II. BASIC PHYSICAL QUANTITIESThe reader is assumed to be familiar with the basic physical quantities that are characteristicto particle transport that will be used in the following Chapters of this book. Thereare, however, several quantities which are named differently in different papers (e.g.,fluence, flux, flux density . . . ), or which have equivalent physical interpretations butdifferent names in different contexts (macroscopic cross-section <strong>and</strong> linear attenuation coefficient).Even a larger variety is found in the use of symbols for a number of terms.Considering all the above arguments it seems appropriate to give a systematic reviewof the basic quantities, their notations, definitions, <strong>and</strong> symbols as well as the derivation ofthe basic relations between several quantities.The main source of the definitions given in the following sections is the most recentbooklet of the International Commission on Radiation Units <strong>and</strong> Measurements (ICRU), 13
23though many quantities not listed there are taken from other sources <strong>and</strong> several notationsare specifically introduced for later use in this book.The survey of the definitions is arranged in sections collecting quantities describingsimilar phases of the radiation transport.A. THE PHASE SPACEA migrating particle (neutron or photon) is represented by a set of coordinates thatuniquely determine the state of the particle. The notations of the relevant coordinates aregiven below.The three spatial Cartesian coordinates x, y <strong>and</strong> z of the particle are often denoted bythe single vectorial symbol r.The three-dimensional unit direction vector is denoted by co <strong>and</strong>, if necessary, itscomponents parallel to the x, y, <strong>and</strong> z coordinates are denoted by M X, w y<strong>and</strong> w,, respectively.The symbol E represents the energy of a particle.Since in many cases the energy <strong>and</strong> the direction of a particle change simultaneously,sometimes the coordinates (, E) are simply denoted by a single vector E. (If somebodydoes not like to see the "energy" described by a "vector", wc would like to remind themthat — at least for neutrons — the direction vector + the energy coordinates might havebeen replaced by the velocity of the particle, i.e., by a real vector quantity.)Further simplifying the notation, a set of the spatial, direction, <strong>and</strong> energy coordinatesare united <strong>and</strong> described by a point in the six-dimensional phase-space: P.In the integrations JjJ . . . dx dy dz may be replaced by J . . . dr, similarly Jj . , . dmdE is often reduced to J . . . dE <strong>and</strong> the shortest way to denote an integration over thewhole phase-space is J . . . dP.B. THE PARTICLE SOURCESThe intensity of a neutron or photon source is denoted by Q <strong>and</strong> Q(P) means the numberof particles emitted with coordinates in dP about P.Generally, for the <strong>Monte</strong> <strong>Carlo</strong> calculations the equations are established for one startingparticle, i.e.,Q(P) dP - 1<strong>and</strong> hence Q is called the source density.For radioactive sources the term activity is used which is the "quotient of dN by dt,where dN is the number of spontaneous nuclear transformations which occur . . . in thetime interval dt". This quantity of the ICRU differs from our intensity in two respects:1. Since we deal with stationary processes in most of this book, the differentiation withrespect to time is not necessary for us, we shall consider all quantities (e.g., collisiondensities, reaction rates) as integrated over an arbitrary time interval (e.g., unity);2. there are many isotopes where e.g., beta decay is the elementary "nuclear transfermation" <strong>and</strong> gammas are emitted only in a fraction of decays thus the number of transformations(activity) is higher than the number of photons emitted (intensity).<strong>Neutron</strong> sources are often characterized by the yield which is the number of neutronsleaving the source. Thus in case of extended sources, the yield is decreased by self-absorption.In many cases, the sources are isotropic, monoenergetic, or point-like. In such casesthe argument is simplified from (P) (r,o>,E) to (r) or (r,E) or in any other way but thesymbol Q is preserved even in these cases. Therefore, equations like(2.15a)
24 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationsare written, <strong>and</strong> here the difference in the argument indicates the difference in the quantities<strong>and</strong> necessarily in their units.C. FLUX-TYPE QUANTITIESThis is the point where perhaps the most loose use of words can be found in the literature.By the ICRU definition "the fluence, , of particles is the quotient of dN by da, where dNis the number of particles which enter a sphere of cross-sectional area da''. The argumentr is naturally joinable to the symbol ( 1> since it specifies the point around which the sphereis placed.The time derivative of the fluence (cp = ¢) is called by the ICRU as flux density orfluence rate, however, in most of the books <strong>and</strong> papers both fluence <strong>and</strong> flux density aresimply called flux, <strong>and</strong> this word is used throughout our book too.Flux also can be considered as differential by energy <strong>and</strong>/or direction of flight, then itis denoted as
D. ELEMENTARY INTERACTIONS OF PARTICLES WITH MATTERlead to:<strong>Neutron</strong>s <strong>and</strong> photons interact with matters in many ways. Interactions or collisions can• Absorption, when the original particle entering the collision is absorbed <strong>and</strong> no particleof the same type is emitted, or• Scattering, if the incoming particle continues its flight after the collision but possiblywith altered direction <strong>and</strong> energy, or» Multiplicative effects, where after certain nuclear transformations more than one ofthe same type particles leave the collision than that entered.There are interactions when the type of the outcoming particle(s) is different from thaiof the colliding particle, e.g., reactions (n,-y) or (n.try). The outputs of these events giveadditional source terms in the joint neutron-photon transport calculations.The probabilities of these interactions both for neutrons <strong>and</strong> photons, depend on thecolliding particle's energy <strong>and</strong> on the knocked element.The interaction probabilities are described by thecross-sections.The total microscopic cross-section is defined as the probability of an interaction in amass element divided by the product of the number of nuclei <strong>and</strong> the fluence. Its unit istherefore cm 2 , <strong>and</strong> the generally used symbol is o\ however, we shall denote it by a*.used:In the formulae of the transport processes another quantity is much more frequently*(Xex = pN A— (2.! 8)]Vfwhere p is the density of the material, N Ais the Avogadro constant, <strong>and</strong> M is the molarmass of the target element. The quantity defined by Equation (2.18) has the unit of 1/crn<strong>and</strong> in neutron physics it is called the macroscopic cross-section <strong>and</strong> denoted by X, whereasin photon interactions the term linear attenuation coefficient <strong>and</strong> the symbol ja are preferred.Since in this book we deal with the transport of both particles the symbol tr <strong>and</strong> thesimple name cross-section is used for the quantity of Equation (2.18) <strong>and</strong> if the microscopiccross-section is referred, we distinguish it with the obligate attribute "microscopic" <strong>and</strong> thesuperscript asterisk.If the matter investigated is a compound of n elements then the resultant cross-sectionis the weighted sum of the elementary microscopic cross sections" rr*•-, W i MU'l'J )where W 1is the weight fraction, cr* is the microscopic cross-section, <strong>and</strong> M 1is theMOLARmass of the i-th component.In most cases different types of interactions may occur at a certain collision <strong>and</strong> thusthe total cross section can be expressed as the sum of partial cross-sections. If a* denotesthe partial microscopic cross-section of the j-th type of interaction on the i-th element, thenthe total cross-section is:
26 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> CalculationsBy introducing the partial macroscopic cross-sections asVv'iEquation (2.20) reduces ton m< r = H cr y(2.21)The cross-section is a function of the incident particle's energy <strong>and</strong> in inhomogeneousmedia it also varies from site to site, thus generally has two arguments:a(r,E)In non-absorption events, differential cross-sections can be introduced wheret r, (r. io. E -* O)'. E') d to' d E'is proportional to the probability that the particle entering a collision of type j with directiono) <strong>and</strong> energy E leaves it with new direction <strong>and</strong> energy coordinates in dw' about ai' <strong>and</strong>between E' <strong>and</strong> E' + dE', respectively.Again only the argument will indicate whether differential or integrated quantities arementioned, i.e., similarly to Equation (2.15a), formulae liken-.(r.K) -I cr,E') dE'can occur.Another quantity important for the study of scattering events is the expected number ofthe oincoming particles. One can assign such an expected number (v) to every type ofinteractions. This number will be trivially 0, for an absorption, 1, for simple scatteringevents, 2, for (n,2n) reactions, etc.For fission interactions of neutrons v is usually not an integer which indicates thatdifferent numbers of neutrons can be emitted even if the same type of nuclei are split byneutrons of the same incident energy.If a complete set of v y-s are assigned to possible interactions with a ;jcross-sections,then the expected number of the outcoming particles isS S v ,j o-y= - J — Jwhich may be either less or larger than one.The probability of the occurrence of a certain reaction (type j) with a partial crosssectionCT 1- isCT<strong>and</strong> this quantity, from its definition could easily be called reaction rate (or more definitely
27absorption, scattering, etc. rate if the type of reaction is definitely denominated). However,the term reaction rate shall be used in a much more genera! sense, as defined in Section G.of this Chapter.E. FREE-PATHS, DISTANCESIn a homogeneous medium the mean free path between two collisions is1X = -trsince the PDF of the path length (R) isp(R) = ere""'* (2.22)<strong>and</strong> thus1\ = = Rc " K JR = -Jo (JActual selected paths will also be denoted by R.In inhomogeneous media, where the cross-section changes during the flight betweentwo collisions the PDF of Equation (2.19) is changed to:p(R) = o-(R) exp^|o-(R')dR'^The quantityT(R) - (2.23)is called the optical distance from the starting point to the next collision site at a geometricaldistance of R.In most of the practical cases, the material does not change continuously, but there arcdifferent, clearly separated regions filled with different media <strong>and</strong> thus the integral in Equation(2.23) is replaced by a sum (see Figure 2.7):nt(R) = S 0•,R 1i= 1F. COLLISION DENSITIESIn Section D. the elementary probabilities of interactions were described. The expectednumber of collisions occurring in a phase-space element dP about P are characterized bytwo functions, two collision densities.X(P) dPis the number of particles leavingsometimes briefly called the outgoing density, whereasa collision with coordinates lying in dP about P <strong>and</strong> isi|i(P)dP
28 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> CalculationsFIGURE 2.7.A particle night crossing boundaries of zones of different materials.denotes the number of particles entering a collision with coordinates dP about P <strong>and</strong> itsname is incoming density, or simply collision density.From the above definitions it is clear that none of these functions is a "density function"since generally the normalization conditionsJ X(P) dP = 1<strong>and</strong>Ji|/(P)dP = 1are not satisfied.The incoming density is closely related to the flux. Let us recall the definition of theflux (fluence, by the rigorous ICRU terminology):(r,E)dadEis the number of particles entering an infinitesimal sphere of radius dr. cross-sectional areaof da = Tr (dr) 2with direction <strong>and</strong> energy dE about E. The expected path length ofthese particles is (see Equation 2.14)4--- - dpThus the expected number of particles entering collisions in the infinitesimal sphere(i.e. the collision density) isi|i(r,E)dr dE = a(r,E) < d( >
29therefore:4,(P) cr(r,,E) cp(P) (2,24)The inverse relationCj)(P)(T(r,,E)(2.25)is valid only if cr ^ 0, which condition clearly reflects the very simple physical fact that invacuum the flux is still a reasonable quantity whereas no collisions can happen if no materialis present.G. QUANTITIES TO BE DETERMINED: REACTION RATES, RESPONSES,SCORESGenerally, the aim of a <strong>Monte</strong> <strong>Carlo</strong> calculation is the estimation of the value of a.physical quantity or values of several quantities. For the sake of simplicity we restrict ourdiscussion to the determination of a single quantity. Extension of the considerations toparallel examination of several quantities is straightforward.These quantities can represent a great number of physically interpretable data varyingfrom the number of collisions in a space element to leakage probabilities, detector responsesor doses absorbed in certain regions of the core of a reactor or even in organs of ananthropomorphic phantom. Just to preserve generality of the discussion all these quantitieswill be called either as receptor responses or reaction rates.A common feature of these responses is that they can be formulated as weighted integrals(or functionals) of one of the collision densities.Thus a response (or reaction rate) is most generally formulated as:(2.26)orThe f <strong>and</strong> T 4, weight function are derived from the physical connection between thecollision density <strong>and</strong> the quantity to be determined. The integrations are extended, to theregion of interest, or, by other words the f weight functions have to vanish outside the rangeof interest. Since the subscript of f is trivial from the type of collision density used in theintegrals of (2.26) it is generally omitted.Naturally if R is calculated not for a finite range but only for a point, e.g., for r G, thenthe weight function contains a Dirac-delta component:f(P) = f,(E)8(r -rjthenSimply, if the number of collisions are to be computed for a phase space domain P 1f(P)—
30 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> CalculationsAnother simple example can be derived from Equation (2.25), the formula for the fluxintegral in a phase-space domain P 0iso--'(r,E)iKP) dPi.e.,I 41(P) = (J-'(r,E)here.A <strong>Monte</strong> <strong>Carlo</strong> estimate of the reaction rate is called the (actual) score, <strong>and</strong> everysimulated event has a — many times zero — contribution to the score. A reaction rate isusually estimated by several independent <strong>Monte</strong> <strong>Carlo</strong> histories <strong>and</strong> the final estimate willbe the average of the individual scores.H. OTHER QUANTITIESThere are many other quantities — which may or may not have direct physical meaning— introduced in the next chapters. They are, however, used only in connection with certainspecial examples or techniques <strong>and</strong> will be defined at the appropriate places.A general rule of our notation is that if a quantity is denoted by x in the analog simulation(in the numerical "copy" of the real physical process) then its counterpart used in thenonanalog simulations (e.g., simulations deviating from the physical process) will be denotedby x.The statistical weights necessarily introduced for nonanalog simulations are denoted byW <strong>and</strong> the factors modifying it at a single step by w.REFERENCES1. Ahrens, J. H. <strong>and</strong> Dieter, IJ., Computer <strong>Methods</strong> for Sampling from the Exponential <strong>and</strong> Normal Distributions,Comm. ACM, IS, 873 (1972).2. Harnett. U. D., The behaviour of pseudo-r<strong>and</strong>om sequences generated on computers by the multiplicativecongruential method, Meth. Comp., 16, 63 (1962).3. Carter, L. L. <strong>and</strong> Cashwell, E. D., <strong>Particle</strong>-<strong>Transport</strong> Simulation with the <strong>Monte</strong> <strong>Carlo</strong> Method. ERDACritical Review Series, National Technical Information Service, Springfield, MA, 1975.4. Coveyou, R. R., Serial correlation in the generation of pseudo-r<strong>and</strong>om numbers, J. Assoc. Comput. Mach.,7. 72 (1960).5. Coveyou, R. R. <strong>and</strong> MacPherson, R. I)., Fourier Analysis of Uniform R<strong>and</strong>om Number Generators, J.Assoc. Comput. Mach., 14. 100 (1967).6. Ermakov, S. M. <strong>and</strong> Mikhailov, G. A., Course of Statistical Modelling (in Russian), Nauka, Moscow(1976).7. Everett, (.'. J. <strong>and</strong> Cashwell. E. D., A <strong>Monte</strong> <strong>Carlo</strong> Sampler. LA-5061-MS Report, Los Alamos ScientificLaboratory, Los Alamos (1972).8. Everett, C. J. <strong>and</strong> Cashwell, E. D., A Second <strong>Monte</strong> <strong>Carlo</strong> Sampler. LA-5723-MS Report, Los AlamosScientific Laboratory, Los Alamos, CA, (1974).9. Everett, C. J. <strong>and</strong> Cashwell, E. D., A Third <strong>Monte</strong> <strong>Carlo</strong> Sampler. LA9721-MS Report, Los AlamosNational Laboratory, Los Alamos, CA, (1983).10. Forsythe, G. E., Generation <strong>and</strong> Testing of R<strong>and</strong>om Digits at the National Bureau of St<strong>and</strong>ards, AppliedMathematics Series, No. 12, U.S. Government Printing Office, Washington, D.C. (1951), 34.11. Gruenberger, F., Tests of r<strong>and</strong>om digits, Math. Tables Aids Comput., 4, 244 (1956).12. Halton, J. H., A retrospective <strong>and</strong> prospective survey of the <strong>Monte</strong> <strong>Carlo</strong> method, SIAM Rev., 12, 1(1970).13. Radiation Quantities <strong>and</strong> Units. Report 33, International Commission on Radiation Units <strong>and</strong> Measurements,Washington, D.C. (1480).
14. Irving, D. C, Freestone, R. M., Jr., <strong>and</strong> Kara, F. B. K., 05R, A general-purpose <strong>Monte</strong> <strong>Carlo</strong> neutrontransport code. ORNL-3622 Report, Oak Ridge National Laboratory, Oak Ridge, TN (1965).15. Kabn, H., Applications of <strong>Monte</strong> <strong>Carlo</strong>. AECU-3259 Report, R<strong>and</strong> Corporation, Santa Monica, CA (1954.}16. Kendall, M. G. <strong>and</strong> Babington-Smith, B., R<strong>and</strong>omness <strong>and</strong> r<strong>and</strong>om sampling numbers, J. k. Stan::;Sue. A, 101, 147 (1938).17. Kendall, M. G. <strong>and</strong> Moran, P. A. P., Geometrical Probability, Hafner Publishing Co., New York (1963).18. Kinderman, A. J. <strong>and</strong> Ramage, J. G., Computer generation of normal r<strong>and</strong>om variables, J, Am. Statist.Assoc.. 71, 893 (1976).19. Lehner, D. H., Mathematical methods in large-scale computing units, in Proc. Symp. on Large-ScuteDigital CaIc Mach., Harvard Univ. Press, Harvard, MA (1949), 141,20. Lux, I., A special method to sample some probability density functions, Computing, 28, !83 (1978)21. Lux, I., Generation of r<strong>and</strong>om numbers by iterative rejection technique (in Hungarian). AlkahnazoiiMatematikai Lapok, 1, 347 (1975).22. Lux, I., HEXANN-EVALU — a <strong>Monte</strong> <strong>Carlo</strong> Program System for Pressure Vessel <strong>Neutron</strong> IrradiationCalculation. VTT Report 210, Technical Research Centre of Finl<strong>and</strong>, Espoo (1983).23. Marsaglia, G., Generating Exponential R<strong>and</strong>om Variables, Ann. Math. Stat., 32, 899 (1961).24. Marsaglia, G. <strong>and</strong> Bray, T. A., A convenient method for generating normal variables, SiAM Rev 6,260 (1964).25. MacLaren, M. D., Marsaglia, G., <strong>and</strong> Bray, T., A fast procedure for generating exponential r<strong>and</strong>omvariables, Comm. ACM, 7, 298 (1964).26. MacLaren, M. D. <strong>and</strong> Marsaglia, G., Uniform r<strong>and</strong>om number generators, J. Assoc. Comput. Much.,12, 83 (1965).27. McGrath, E. J. <strong>and</strong> Irving, D. ('., R<strong>and</strong>om Number Generation for Selected Probability Distributions.ORNL-RSIC-38 Report, Techniques for Efficient <strong>Monte</strong> <strong>Carlo</strong> Simulation, Vol. II., Oak Ridge NationalLaboratory, Oak Ridge, TN (1975).28. Mikhailov, G. A., On modelling r<strong>and</strong>om variables for one class of distribution laws, (in Russian), TeonyiiVeroyatnostei i ee Primeneniya, 10, 749 (1965).29. Neumann, J., Various Techniques Used in Connection with R<strong>and</strong>om Digits. National Bureau of St<strong>and</strong>ardsApplied Mathematics Series, No. 12, U.S. Government, Printing Office, Washington, D.C. (1951), p. 36.30. Rhoades, W. A. <strong>and</strong> Mynatt, F. R., The DOT III. Two-dimensional Discrete Ordinates <strong>Transport</strong> Code.ORNL-TM-4280 Report. Oak Ridge National Laboratory, Oak Ridge, TN (1973).31. Shreider, Y. A., Ed., Metod statisticheskih ispytani <strong>Monte</strong> <strong>Carlo</strong> (in Russian) Fizmatgiz, Moscow (1961).— German translation: Die <strong>Monte</strong> <strong>Carlo</strong> Methode und ihre Verwirklichung mil elektronischen DigilalrechnernB.b. Teubner Verlagsgesellschaft, Leipzig (1964). — English translation: The <strong>Monte</strong> <strong>Carlo</strong> Method,Pergamon Press, New York (1966).32. Sobol, I. M., The <strong>Monte</strong> <strong>Carlo</strong> Calculational Method, (in Russian), Nauka, Moscow (1973).33. Spanier, J. <strong>and</strong> Gelbard, E. M., <strong>Monte</strong> <strong>Carlo</strong> Principles <strong>and</strong> <strong>Neutron</strong> <strong>Transport</strong> Problems, Addison-Wesley, Reading (1969).34. Taussky, O. <strong>and</strong> Todd, J., Generation of Pseudo-r<strong>and</strong>om Numbers. Symp. on <strong>Monte</strong> <strong>Carlo</strong> <strong>Methods</strong>,University of Florida 1954, H.A. Meyer, Ed., John Wiley & Sons, New York (1956). 15.35. Wood, J., Computational <strong>Methods</strong> in Reactor Shielding. Pergamon Press, Oxford (1982).
">3
33Chapter 3DIRECT SIMULATION OF THE PHYSICAL PROCESSES"Life" of a neutron or photon, from its birth to its death is governed by nature viamany r<strong>and</strong>om processes. Just at the very beginning: there is only a certain probability thata particle is "born" at all in the source in a given short time interval. The initial directionof flight of a particle is also a r<strong>and</strong>om variable <strong>and</strong> such is its energy (if the source is notmono-energetic) <strong>and</strong> its location (if the source is not so small in spatial extension that canbe represented by a point).In addition, r<strong>and</strong>omness remains with the particle throughout its further history. Neitherthe distance traversed up to its next collision site nor the type of the subsequent interactioncan be determined in advance for an individual particle. Instead, probability distributionsof them are known. Similarly, r<strong>and</strong>om variables are the energy <strong>and</strong> the direction of thescattered particles <strong>and</strong> even the number of the secondaries created in a multiplicative interaction.The same uncertainty characterizes the detection: only a certain fraction of the particlescrossing the receptor region will interact in that volume. Again, only the interaction probabilities<strong>and</strong> not the reactions of any individual particles can be predicted even if all thephysical parameters of both the particle <strong>and</strong> the receptor are known.As a consequence of these inherent stochastic processes all observed results will beaccompanied by smaller or larger fluctuations, this is why, e.g. measured count rates aregenerally given together with their st<strong>and</strong>ard deviations. In measurements carried out undertime-independent (steady-state) conditions, the easiest way to decrease the statistical uncertaintiesis the increase of the observation time. The alternative — but seldom realizablein practice — way is the increase of the source intensity. Anyhow, in most experiments theproduct of the source intensity <strong>and</strong> the observation time can be set to as large as 10* particles,or even higher by several orders of magnitude.If the reader compares the definition of <strong>Monte</strong> <strong>Carlo</strong> methods we gave at the beginningof Chapter 2 <strong>and</strong> the r<strong>and</strong>om nature of the neutron <strong>and</strong> photon migration outlined in theprevious paragraphs, one cannot hut wonder that many people got the idea to connect thetwo phenomena: to try to simulate the particles' r<strong>and</strong>om walk on computers. The wordsimulation here means the as accurate as possible realization of the coordinates of the particles— in a computer.At first sight one might think that the accuracy of the computer simulation depends onthe answers to two questions:1. How precisely do we know the probability distributions governing the physical processes,<strong>and</strong>2. How correctly can we select r<strong>and</strong>om samples from these distributions?And really, lack of satisfactory knowledge of the distributions or application of incorrectlyselected procedures may draw systematic errors into the computations. By using aterminology more familiar in <strong>Monte</strong> <strong>Carlo</strong>: the results will be biased.There is, however, another source of error. It is the statistical uncertainty which isat least in the one-to-one simulation — completely analog — or even equivalent — to ther<strong>and</strong>om fluctuation observed at measurements. The origin of this uncertainty is theoreticallythe same for the physical processes <strong>and</strong> their computer simulations. Nevertheless, in practicethey differ — unfavorably for the <strong>Monte</strong> <strong>Carlo</strong> technique — in their extent. The r<strong>and</strong>omwalk simulations are very time-consuming <strong>and</strong> therefore an increase of the simulation number(the computational counterpart of the product of the source intensity <strong>and</strong> the measuring time)over about 10 5is seldom realizable.
34 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> CalculationsThus, in most <strong>Monte</strong> <strong>Carlo</strong> programs, special techniques are introduced to decrease thestatistical uncertainties. The introduction of such techniques leads to deviations from theone-to-one simulations, to so-called nonanalog games. Appropriate selection of the nonanalogprocedures is of major importance <strong>and</strong> will be discussed many times, in different levelsthroughout this book.Now, however — in spite of all its disadvantages — let us turn back <strong>and</strong> investigate indetail the analog simulation, from which the idea of <strong>Monte</strong> <strong>Carlo</strong> application for particletransport originated in the 1940s. Still now, a deep underst<strong>and</strong>ing of the simplest analogprocedures is the basis for underst<strong>and</strong>ing the more advanced techniques.In the same way as the life of a physical particle starts by its emission from some sortof source, in an analog <strong>Monte</strong> <strong>Carlo</strong> game first the initial coordinates have to be selected.The next step is the free flight of the neutron or photon up to its next collision, consequently,in the simulation, a path length has to be selected. From the starting point coordinates <strong>and</strong>the direction of flight, the site of the subsequent interaction is to be determined.At the collision site, a large variety of interactions with the different atoms constitutingthe material at that point can take place. Accordingly, in the numerical simulation, first thetypes of both the collided atom <strong>and</strong> the interaction have to be selected. If the actual collisiondoes not lead to absorption the particle goes on its way with a new energy <strong>and</strong> direction —both of them are to be selected. In multiplicative events, or e.g. (n,y) reactions, new particlesare also created, the parameters of which are generally immediately selected but temporarilystored <strong>and</strong> h<strong>and</strong>led as coordinates of particles from secondary sources. The histories of these"secondaries" are followed after the termination of the "primary" particle. (For correctnessit must be noted here that in, e.g. an (n,2n) reaction there is no physically correct distinctionbetween the two outcoming neutrons as to which one is the primary <strong>and</strong> which is thesecondary. The decision is arbitrary from the point of physics <strong>and</strong> is governed by practicalconsideration.)After the simulation of a scattering event, the process is followed by a next path selection.The repetition of this two step (transition + collision) cycle is terminated by one of thefollowing three events:• An absorption takes place• The particle leaves the system investigated in such a way that there is no possibilityto return• The energy of the particle falls out of the range of interestIf the event, whose frequency is just studied, occurs, the actual contribution is calculatedeither in the transition or in the collision phase. The sum of the contributions collectedduring the simulation of the history of a single primary source particle is called the score.And the average of an appropriately large number of scores is the <strong>Monte</strong> <strong>Carlo</strong> estimate ofthe physical quantity investigated.In the consecutive sections of this Chapter, the basic procedures used during these steps(source selection, transition <strong>and</strong> collision simulations, <strong>and</strong> scoring) are discussed, severalspecific procedures, frequently used in neutron <strong>and</strong> photon transport processes, are collectedin the Appendices of this Chapter.I. ANALOG SIMULATION OF THE RANDOM WALKA. SELECTION OF SOURCE PARAMETERSThere are six fundamental parameters of a particle emitted from a source, viz:• The three spatial coordinates: r = (x,y,z), in a Cartesian system• Two coordinates of the direction of flight: co = ((D„(o y,(o z), |to| = 1 <strong>and</strong>• The energy (E) of the particle
35The list presented above is not the only possible specification, one can use, e.g., sphericalcoordinates instead of Cartesian, or replace the energy of the photons by the wavelength,or prefer to describe the state of a neutron by the velocity vector instead of the energy am!the unit length direction vector.However, in any representation, the number of the mutually independent parameters issix <strong>and</strong> simple transformation rules can help to change from one representation to another,if needed.Any set of the six parameters can be considered as the coordinates of a point in a sixdimensionalphase-space.In nearly all practical cases the source density Q (r,co,E) can be factorized as:Q(r.«,E) = Q,(r) • QJo>)• Q 1;(E)reflecting the physical fact that the spatial, directional, <strong>and</strong> energy distributions anindependent from each other.From the point of view of <strong>Monte</strong> <strong>Carlo</strong> selection, it means that one can >;e v»,the r, to, <strong>and</strong> E coordinates.To simplify the description of the selection procedures, we assume -— ft— that the source is normalized to unity, i.e.,:Jq(P)CIP = 1moreover:Jq 1(F) dr -- 1<strong>and</strong>JqJWMCO - 1JQe(E) dE = 1If these conditions are not fulfilled <strong>and</strong>(Q(P)dP - Q 0* 1then the only correction that has to be made is the multiplication of all results by 0,, sincethe transport processes are linear with respect to the absolute source intensity.1. Space Coordinates SamplingFor point-like sources, the r<strong>and</strong>om selection is replaced by an assignment:r •-• r for i = 1,2, ni.e., all the n simulations start from the source point rIf the source is uniformly distributed along a straightline (or rod of negligible radius)
36 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> CalculationszthyFIGURE 3.1.Selection of a r<strong>and</strong>om point from a line source.then let us put this line into the coordinate system as given in Figure 3.1, <strong>and</strong> define theaxis t along the source line. ThenQ(t) dt =p(t)dtif t = 0 at R 1<strong>and</strong> R 2= R 1+ T(R 2- R)Now the i-th source point is selected as:r, = R 1+ P 1T(R 2 R 1)More complicated, one-dimensional sources (or more precisely sources that can beapproximated by one-dimensional curves) seldom occur in practice. But if they do occur,the best approach is to describe the curve in a parametric form, then select the parameter tfrom p(t) <strong>and</strong> determine the Cartesian coordinates by transformation.After, the zero- <strong>and</strong> one-dimensional forms let us continue with sources that can bedescribed by surfaces.If the surface is a region of a plane, let us fix a (£„r\) coordinate system to the plane.Points from sources that have simple boundaries can be easily selected. Recipes to pick-uppoints from a square (or from a rectangle, after linear transformations) <strong>and</strong> a circle are givenin Sections 2.1.1 <strong>and</strong> 2.I.J, respectively. For other surfaces with complicated boundaries,the application of the rejection technique is recommended — if the user cannot find a special,efficient tricky method for his problem. In the application of the rejection method the sourceregion is to be covered by a rectangle (Figure 3.2.a) from which tentative coordinates areselected. The points lying out of the region of interest are to be rejected.If the area of the covering rectangle is much larger than that of the source, it is expedientto cover the source region by several smaller rectangles (Figure 3.2.b). In this case, firstone of the rectangles is to be selected. The i-th one is chosen with a probability of
¥7if t, is its area <strong>and</strong>Tthen the coordinates are selected from the i-th rectangle — by the rejection method.The covering surface is not necessarily a rectangle. (The reader should remember thatin the general description of the rejection technique in Section 2.1.C we have also startedwith a majorant constant <strong>and</strong> subsequently proceeded to majorant functions.) Any geometries!figure which is easy to sample can be used. For example, in Figure 3.2.B the first coveringrectangle should, generally, be replaced by a parallelogram, if the t,/t,* efficiency gainovercompensates for the time increase brought in by the more complicated sampling procedureneeded.Surfaces extended into three dimensions seldom occur in practice. If the source isuniformly distributed on the surface of a sphere then the method given in Section 2.I.J forthe selection of three dimensional unit vectors can be applied — with two additional transformations:first all the three Cartesian coordinates have to be multiplied by the actual radius,then the points have to be shifted by the coordinates of the actual center of the sourceMost sources are extended into three dimensions. (Physically there are only threedimensionalsources, the representations of them by points, curves, or surfaces are onlyapproximations.)The ideas of r<strong>and</strong>om sampling in three dimensions are the same as in two dimensions.For simple regions (rectangular blocks, circular cylinders, spheres, etc.) direct procedurescan be developed by establishing the appropriate PDFs <strong>and</strong> using the inverse distributionmethod (Section 2.1.A). Points from source zones limited by complex boundary surfacescan be selected by the rejection technique: now the zones (or separate parts of it) are to beimbedded in rectangular boxes — or sometimes into other volumes still easy to h<strong>and</strong>le.2. Sampling of Initial DirectionsIn the great majority of problems the particles are emitted by isotropic distribution, inwhich case, the method for selecting the direction cosines of r<strong>and</strong>om vectors described inSection 2.1..1 may be used.Sometimes a parallel beam of particles enters the system of interest. In such a case,the r<strong>and</strong>om sampling of the direction cosines is replaced by assignments of the actual values.A cosine distribution is achieved if a plane is placed into an isotropic field, (i.e., into
38 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationsthe infinite space where isotropic sources are distributed uniformly). Let us fix the coordinatesystem's [x, y] plane parallel to the plane of interest. Then the outer normal to the planehas the following direction cosines:<strong>and</strong>,.„ = 1The cosine distribution has the PDF: 6P(W 2) - 2co z, w z3= 0Thus, according to Equation 2.2p = 2co 7dco 7<strong>and</strong> theW 7= Vpsampling rule can be used. (The reader should remember Theorem 2.6 <strong>and</strong> replace theexecution of a square root by selecting the maximum of two r<strong>and</strong>om numbers.) Since theazimuth is uniformly distributed over (0,2ir), in the formulaeCo x= Vl— Co 7• coscp<strong>and</strong>co y= Vl— Co 7• sincpcoscp <strong>and</strong> sincp can be selected either directly (cp = p,2ir), or by the Neumann method givenin Section 2.I.J, Equation (2.15).3. Selection of the Initial EnergiesThe simplest — <strong>and</strong> not too rare — case is if one has a monoenergetic source <strong>and</strong> can,therefore, replace the energy selection by an assignment. There are many gamma sourcesthat emit photons of different discrete energies with different intensities (probabilities). Thesampling from such line spectra can be carried out as described in Theorem 2.1.More skillful techniques are needed to pick-up energies from continuous spectra. Arelatively easy, though not exact, method is to approximate the spectrum with either a stepfunction or by a broken line. In both cases the inverse distribution method (Section 2.1.A)is applicable. If the continuous spectrum is described by an analytical formula, the task isto find the best of the methods discussed in Section 2.1, but the rejection technique is theonly one that always works.Two source types have special importance in neutron transport calculations. <strong>Methods</strong>for selecting neutron energies from the Watt-fission spectrum <strong>and</strong> from the Maxwelli<strong>and</strong>istribution describing the energy distribution of the thermal neutrons are given in Appendices3B <strong>and</strong> 3C, respectively.
39B. PATH LENGTH SELECTIONAs has been introduced in Section 2.II.E the path (R) traversed between two collision*has a PDF of:p(R) = CT(R) expa(R') dR'If the medium ishomogeneous:CT(R')= CT,,thenp(R) =
40 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationsdetermination of the R 1distances, i.e., in the determination of the coordinates, where theparticle trajectories cross the boundaries separating the different homogeneous zones. Thisprocedure may be extremely complicated in complex geometries thus another technique 48is suggested instead of the "straightforward" method described above.The method is the following:(rO:1. Define a majorant cross-section: cr 0S 5 rj(r), for all r-s along the path;2. Select a distance R by Equation (3.2) <strong>and</strong> determine the tentative next collision siteK = r k_! + R
41For the computer simulation outlined above, a trajectory going out of the system meansthat t for certain p-s n-« selected, QplprtpH the thp- inequality:inprmalitvjof Equation (3.3) cannot be fulfilled even with the largest j — the particle goes through al!regions without collision.Such a finite extension of the non-zero, cross-section region has the mathematicalconsequence that the p(R) function given in Equation (3.1) is not a PDF. If R 0is thecoordinate of the latest boundary crossing point in a certain trajectory (rj(R') ^ 0, ifR' > R 0), thenP(oc) - P(RJ < 1The leakage of the particles will be discussed in this latter way, that is as a problem ofhaving a not normalized probability density for the path length, in Sections 3.1.A <strong>and</strong> 4.IV.E.There is an alternative description of the isolated systems: a black absorber surface isplaced on the outer surface. This approach of absorbing all particles crossing the systemboundary is as acceptable as to let the particles fly away forever.*C. COLLISIONS — IN GENERALThere are many different ways in which an incident particle can interact with matter.The most general formulation of the interactions was given in Section 2.N.I). The quantitythe value of which is proportional to the probability that an interaction will take place in anelementary volume is the cross-section. If there are n elements composing the material inwhich the particle flies, <strong>and</strong> m different types of interactions then the total cross-section isexpressed by the sum:o-(E) = E S 0-(E) (3.5)i = i j = iwhere (J 13denotes the partial macroscopic cross-section of the j-th type interaction, if the ith type element is hit by a particle having an incident energy E.The cross-sections are assumed to be independent of the angle of incidence (w). Thisassumption is not fully true, however the influence of the orientation of the particle withrespect to e.g., the axis of a molecule containing the element hit is always negligible intransport calculations.The probability that at the next interaction the i-th element will be hit <strong>and</strong> the actualinteraction will be of the j-th type is:CT 1J(E)Py = -77J7 (3.6)CT(E)From Equations (3.5) <strong>and</strong> (3.6) it trivially follows that:nmS X P, -I* The author of this paragraph (L.K.) admits that, of these two physically fictional but very fruitful models hecan more easily imagine the system immersed in an infinite sea of vacuum than covered by an impenetrableabsorber.
42 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationsi.e. the actual (i,j) values can be selected as described in Theorem 2.1. Since at the definition(3.5) we assumed that all interaction types are allowed for all elements, there might be (i,j)pairs for whichCR, = 0(For example, in neutron transport calculations, one of the possible interactions is fission,but the list of the fissionable elements is quite limited.) In practice generally one of thefollowing two ways is followed:1. First the type of interaction (j) is selected with a probability ofp, = S p„i = I<strong>and</strong> then the element hit is chosen from the conditional probability:np(i|j) =^PiThe second selection is frequently omittable, for example, if the selected interaction isabsorption it may be of no interest which type of element absorbed the particle.2. One can first select the element i with a probability of:INPi = SP,jJ= 1<strong>and</strong> follow with the selection of the type of interaction. The conditional probability for thesecond selection is now:P(JlO = -P,This method is advantageous if the types of interactions that have non-zero cross-sections(i.e., that can reallyhappen) are different for the different elements involved in the sameproblem. (As an example, the reader can think of a reactor core containing water <strong>and</strong>uranium.)After the selection of the actual interaction the <strong>Monte</strong> <strong>Carlo</strong> treatment may be continuedin three principally different ways:1. If an absorption is selected then the history of the particle followed is terminated.The termination of the life of the followed particle, however, may lead to creation of newparticles.Let us illustrate with two examples:• The neutron is absorbed in an (n,"y) reaction where a secondary photon is createdwhich has to be followed if one executes a coupled neutron-gamma transport calculation,in practice, this may be done by storing the phase-space coordinates of the photons created,continuing the neutron simulations <strong>and</strong> start a gamma transport calculation phase afterwards.• At pair-production, the followed photon disappears <strong>and</strong> an electron-positron pair is
43created. However, from the immediate annihilation of the positron, two new photons arecreated, by very good approximation just at the site of the pair-producing interaction.Since the scope of the book is restricted to neutron <strong>and</strong> photon transport problems, weassume that paths of charged particles are never followed. Thus, interactions like (n,p) OJ(n,a) are considered as absorptions.2. In the simulation of scattering events, energy <strong>and</strong> direction coordinates of the scatteredparticles have to be selected according to the appropriate probability densities,3. If a multiplicative event; such as a fission, or (n, 2n) reaction; is selected, then theenergy <strong>and</strong> direction coordinates of the new particle(s) have to be selected. In case of eventsin which more than one secondary is created, the history of one is followed immediately,the initial coordinates of the other(s) are temporarily stored.Hereafter, we assume that the system is subcritical, that is the number of stored particlesdoes not increase boundlessly.The simulation of the collisions is the only point in the analog <strong>Monte</strong> <strong>Carlo</strong> where rti
44 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> CalculationsCross-sections of individual elements <strong>and</strong> several frequently used compounds are available,e.g., in the compilations mentioned above. It is worth noting here that in the energyrange which is typical in reactor physics calculations (—10 keV to 10 Mev), from amongthe three important interactions the uncertainties of the photoelectric cross-sections are thelargest.2. Compton ScatteringIn Compton scattering the incident photon loses a part of its energy <strong>and</strong> is deflected.The theory of this effect was developed by Klein <strong>and</strong> Nishina. 22In their derivation it isassumed that the electron is initially free <strong>and</strong> at rest. In this case the electron hit carriesaway the full energy lost by the incident photon.Under the free stationary electron assumption the Klein-Nishina differential microscopiccross-section isda?(a 0,r)) _ 1zr 2 [l + ajl - cos-d)]dO 22+ cos v +a 2 (l -- ms-ftl cos-t)) 22-I rcin cm 2 /p.lf>rtrnn~/electron1 + a„(l - cos-D). steradian(3.7)(The index 1 refers to the "one-electron" cross-section.)In Equation (3.7), the following notation is used: a„ — is the incident photon's energyin electron rest energy units, i.e.,:a„ = EJk where e = m ec 2 = 0.511 MeV{> is the deflection angle of the photon; <strong>and</strong> r eis the classical radius of the electron(r e= e 2 /(m tc 2 ) = 2.818 x 10" 1 3 cm)From the conservation of momentum <strong>and</strong> energy, the energy loss of the photon <strong>and</strong> theangle of deflection are linked by the following relation:1i=«=x a 01 + a„(l — cosx))(3.8)where a is the photon's energy after the collision, in electron rest energy units <strong>and</strong> 1/x isthe energy loss ratio.Since the minimum <strong>and</strong> maximum values of cos \) are -- 1 <strong>and</strong> + 1, respectively, x canvary from 1 to 1 + 2a u.By substituting Equation (3.8) into Equation (3.7), <strong>and</strong> taking into account thatdli =- 2ird(cos-ft)<strong>and</strong> from Equation 3.8d(cos-&) =dx
45one gets a new formulation of the differential microscopic cross-section:datfa ,x) / B C D\dx- K( A +V xI ; H ; ) = f(a„,x)x 2 x(3.9)whereK = TTr 2 Ya 0A =I/alB = I - 2(a c+ l)/a 2C = (1 + 2aJ/a 2<strong>and</strong>DThe total cross-section is obtained by integration of either Equation (3.7) over all anglesor Equation 3.9 over 1x =¾ 1 + 2a D. The result is1 + a„fl +cr*(a 0) = 2Kj- -2 + 2a„ Cn(I + 2a J1 + 2a„€n(l + 2a„) 1 + 3a„2a 0(1 4- 2a 0) 2 (3.10)Equation (3.10) can theoretically be used for direct computation, however, it leads tonumerical errors due to near-cancellation between the logarithmic <strong>and</strong> algebraic terms atlow energies. For practical use the empirical formula of Hastings 21is proposed:C Tl" "~f~ CT) -J- Co-TK) = Ka 0- T--:'7---;rV" ":f"T • 1 1 •)Tf + d,Tf + d 2T| + d 3where T 1= 1 +0.222037a o, C 1= 1.651035, C 2= 9.340220, C 3= -8.325004,d, = 12.501332, d 2= -14.200407 <strong>and</strong> d 3= 1.699075.The fit of Hastings is correct within 1.3% up to 100 MeV. Its use is recommended notonly due to the lack of the numerical problems mentioned above, but also because theevaluation of the RHS of Equation (3.11) is much faster than that of Equation (3.10).The Klein-Nishina cross-section formulae describe the probabilities of scattering on asingle electron. The cross-section of an element whose atomic number is z <strong>and</strong> thus containsz orbital electrons is:The macroscopic cross-sections, or rather the linear attenuation coefficients accordingto the terminology generally used in connection with photon interactions, are to be calculatedas given in Equation (2.20) both for the differential <strong>and</strong> the total cross-sections. Since theangular (or energy change) distribution, in the Klein-Nishina approximation, is independentof the atomic number(s) of the element(s), the angle of scattering (or the energy of thescattered photon) can be selected by the same procedure for all elements <strong>and</strong> compounds.
46 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> CalculationsIn other words there is no need at all to select the type of element hit, thus method 1. ofSection 3.1.C is preferred.The PDF to be sampled isp(a u,x)f(a u,x)0"f(a o)where f <strong>and</strong> a* are defined by Equations (3.9) <strong>and</strong> (3.10), respectively, <strong>and</strong> values of theenergy change x are to be picked up with given a ()incident energies.Concrete recipes are given in Appendix 3A.In reality, the electrons of an element or compound are neither free nor at rest whenthe photons hit them. The binding corrections are usually taken into account by applying amultiplicative correction, the so-called incoherent scattering function S(q,z):or lm(a 0,d,z) = (T 1(OL 1,,®) • S(q,z)The first argument of S is the momentum transfer:q = (a 2 + a 2 - 2aa 0cosft)" 2 (3.12)the second is the atomic number.Tables of incoherent scattering factors are given e.g., by Hubbell et al. 24while Biggset al. 3 developed analytical approximations for them. Recently, Persliden 41 developed asampling method, where first the Klein-Nishina density function is sampled <strong>and</strong> an additionalaccept or reject game is applied for the correction for electron binding.Data for the incoherent scattering factors <strong>and</strong> total cross-sections derived with them areincluded in most large cross-section libraries mentioned earlier.Trivially, if the electron binding effect is not neglected, the scattering angle (or energychange) distributions are not element independent anymore.The formula for incoherent scattering can be further refined:• one can take into account that the electrons hit are not at rest but in motion• the radiative correction reflects the emission <strong>and</strong> reabsorption of virtual photons• there is a minor probability that double Compton effect occurs, in which an additionalphoton is emittedAll these corrections are described in details by Hubbell et al. 24In practical transportcalculations, however, most frequently the use of the Klein-Nishina approximation is satisfactory.3. Pair-ProductionIn this interaction the incident photon disappears in the field of either the nucleus or anelectron, <strong>and</strong> an electron-photon pair is created. The threshold of the effect is 2m l!c 2(thecombined rest energy of the created particles). The cross-section rises monotonically fromzero at the threshold. With the exception of the lowest atomic number elements, pairproduction in the field of electrons is much less probable than that in the field of the nucleus.The cross-section for pair-production in the field of the nucleus is proportional, roughly, tothe square of the atomic number.The full phenomenon of pair-production is quite complicated, readers interested in detailsare advised to read the overview of Hubbell et al. 24Cross-sections for particular elements can be found in the libraries already mentioned.
47The life of the primary photon is trivially terminated at pair production. The two chargedparticles follow their paths, however the positron — generally in the closest vicinity of stsbirth — combines with an electron. In this annihilation, two photons are emitted. These"secondary'' photons have twice m 0c 2initial energies, assuming that the annihilated electronpositronpair had virtually no kinetic energy. The two "secondary" photons start to fly inopposite directions, which are practically uncorrelated to the direction of the primary photon.Since the free paths of the positrons are negligible relative to those of the photons, in the<strong>Monte</strong> <strong>Carlo</strong> codes the annihilation games are started just from the site of the pair productionevent.4. Other InteractionsFrom among the other reactions Rayleigh (or coherent) scattering is a process whichmay be not negligible at low energies for materials containing high atomic number elements.During coherent scattering, by definition, there is no energy loss. The angle distribution isdescribed as a product of the classical Thompson cross-section:dated) r 2<strong>and</strong> the so-called atomic form factor F(q, z), where q is again the momentum transfer. Sincehere a (, = a, Equation (3.12) reduces toq = 2a„sin —M2In many photon transport calculations Rayleigh scattering is treated by combining itwith the electron binding effect on the Compton event. Therefore, values of the atomic formfactors are given in the same references as those of the incoherent scattering function. Ascattering angle selection method is proposed by Persliden. 41<strong>Photon</strong>uclear absorption — These processes, leading to emission of one or moreneutrons, charged particles or photons, have small cross-sections, but there are broad peaks(giant resonances) in the 12 to 24 MeV region (at higher energies for the light elements).Since a large fraction of these reactions leads to the emission of neutrons, nuclearabsorption may be interesting in high energy coupled photon-neutron calculations. Photo -nuclear cross-section compilations have been carried out at the NBS.' 7 ' 8Other photon interactions (e.g. Delbriick-scattering, or photomeson production) contribute less than 1% to the total cross-section <strong>and</strong> are always neglected.E. INTERACTIONS OF NEUTRONS WITH MATTERThe ways in which a neutron can interact with matter show a much larger variation thanis exhibited by photon interactions.A major physical difference is that photons interact mostly with the electrons of theatoms, whereas neutrons interact predominantly with the nucleus. Moreover, the crosssectionvs. energy curves are not so smooth, for several important interactions no theoreticalformulae are known, the user has to pick up both the total <strong>and</strong> differential cross-sectionsfrom compilations of measurements.There are resonances, where the cross-section jumps up <strong>and</strong> then back down in anextremely short energy interval <strong>and</strong> the measurement of the fine structure of such an abruptcross-section change is very problematic. Thus problems with the unresolved resonances arediscussed separately at the end of this Section.
48 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> CalculationsIn general, from the computational point of view, one can choose from two basicallydifferent approaches. In the first case the energy is allowed to change continuously. Then,the uncertainties in the shape of the near-resonance part of the cross-section curve may causesignificant errors, especially since interpolation between different energies is a hard task.Similarly, problematic is the interpolation between different elements, <strong>and</strong> even variousisotopes of the same element may have significantly different cross-sections at the sameneutron energy.The other method is the use of the so-called multigroup treatment. Here, the energyrange of interest is artificially divided into several groups <strong>and</strong> the cross-sections are averagedover them. Needless to say, the more groups are used the more accurate results may beexpected. The fundamental problem with the multigroup treatment is that the cross-sectionsmust be averaged by the flux-energy curve, which is not known in advance. Anyhow, thepreparation of the multigroup cross-section libraries is a very difficult task <strong>and</strong> has its ownlarge literature. In the following we shall discuss only the pointwise cross-sections.Even in the pointwise (continuous energy) treatment, neutrons that have slowed downby a sequence of scattering events to equilibrium with the thermal motion of atoms areh<strong>and</strong>led in a separate group. These thermal neutrons either lose or gain energy during thescatterings, therefore, one can say that the "end" of slowing down is thermalization.Generally, neutrons whose energies are less than about 0.5 eV are called thermal neutrons.Classification <strong>and</strong> description of the neutron interactions are given in several textbooks,see e.g., References 20, 1, <strong>and</strong> 8.For the actual cross-sections, the reader is again advised to review the large compilations,such as the ENDF 3 0 <strong>and</strong> the Livermore 32 libraries.1. CaptureUsing a somewhat loose terminology one could say that capture of neutrons is thecounterpart of the absorption of photons. Really, in this process the history of the neutronis terminated — like that of the photon at a photoelectric interaction. Significant differencein the treatment arises only in coupled neutron-photon transport codes, since an importantkind of capture events is radiative capture, where the emission of a photon follows theabsorption of neutron.The cross-section for capture typically does not exceed a few percent of the scatteringcross-section. Radiative capture is, however, a more important reaction for thermal neutrons.For nuclides which have a capture resonance near the thermal region capture represents themain contribution to the total cross-section. The thermal capture cross-section of cadmiumfor example, is higher by a factor of more than 300, than the scattering cross-section.2. Elastic ScatteringIn an elastic scattering between two particles (the incident neutron <strong>and</strong> the target nucleus)the momentum <strong>and</strong> the energy are conserved. The basic assumptions involved in the abovestatement are that the target atoms are initially free <strong>and</strong> at rest.The change in neutron energy, from E 0to E, <strong>and</strong> the scattering angle (in the laboratorysystem) are linked by the following relation:(3.13)where A = m,/m n, the ratio of the mass of the target to that of the neutron or. with verygood approximation, the mass number of the target nucleus. The new energy is determined
49from Equation (3.13) asE = -—- (cosft + Vcos 2 ff + A 2 - I) 2 (3.14)(A + I) 2Substituting the two extreme values: COS'S = - 1 <strong>and</strong> cost) = 1, respectively, one getsthe restrictionE„a 2 =£ E =S E 0for the new energy, where a = (A — 1)/(A + 1).For a wide range of energies (especially for light target nuclei) the elastic scattering isisotropic in the center-of-mass system. Then its cosine can be simply selected as(cos-d) cm= 1 - 2p (3.15)<strong>and</strong> the cosine of the scattering angle in the laboratory system iscv1 + A(cosd) c mCOStJ = — = =-=== (j.16)Vl -FA 2 + 2A(cosft) cmHereafter the subscript cm indicates the variable measured in the center-of-mass system,angles in the laboratory system have no subscripts.The new energy is to be computed from Equation (3.14), or directly fromE = V 2EJ(I - a 2 )(cosfl) cm+ 1 + a 2 ! (3.17)where a = (A - 1)/(A + 1).The selection procedure can further be simplified if the target is hydrogen: A = 1. Bypreserving the isotropic scattering assumption in the center-of-mass system (which is validup to about 10 MeV) <strong>and</strong> substituting Equation (3.15) into Equation (3,16) one getscos-d = VpThe new energy isE = E 0(cos-f>) 2= E„pWhen scatterings are simulated for such incident energies <strong>and</strong> target nuclei that scatteringis not isotropic, theoretically the Equationcr(p,)dp, (—1 5 S fx «£ i) (3.18)has to be solved for the actual selection, where p, denotes the cosine of the scattering angle— either in the laboratory or in the center-of-mass system. If the differential cross-sectionis given in the center-of-mass system, then there are two ways to proceed:1. One can first transform the cross-section according totr(p,)dp, = CT tm(p. cJdp. om(3.1 1 ))
50 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculations2. Or select the center-of-mass scattering angle <strong>and</strong> compute the cosine of the scatteringangle in the laboratory system from Equation (3.16).The differential cross-sections required to solve Equation 3.18 are found in the librariesin approximate forms, they are usually tabulated in terms of |x cm.If the elastic scattering is not assumed to be isotropic in the center-of-mass system, dataspecifying the differential cross section are required to solve Equation (3.18). Since anisotropyis much more frequently considered in simulating inelastic than elastic scatteringevents actual techniques are discussed in the next subsection <strong>and</strong> in Appendix 3D.3. Inelastic ScatteringIn a scattering process, if the residual nucleus is left in an excited state, the scatteringis called inelastic. The kinetic energy retained by the target nucleus is denoted by — Q. Thevalue of Q is negative, since, by definition, Q is "the excess of kinetic energy of the productparticles over that of the original particles". 8Again, from the conservation of energy <strong>and</strong> momentum, the scattering angle iscos-it = -2, E E QA(A + 1) (A - 1) / 7 =(3.20)<strong>and</strong> the new energy isE = - [cosWE 0± \/E 0(cos 2 -& + A 2 - 1) + A(A + I)Q] 2 (3.21)(A + I) 2Naturally, Equations (3.20) <strong>and</strong> (3.21) reduce to Equations (3.13) <strong>and</strong> (3.14), respectively,if one substitutes Q = 0.If Q is large, Equation (3.21) might lead to complex solutions, thus, there is a thresholdenergy (E 01) for a given cos-d:A(A 6+I)QCOS 2 Tj -+ A-' - 1The minimum threshold [(E 0 t) m] is given by cos-d — 0:A + 1(E 0X = — QThere is no inelastic scattering if the energy of the incident neutron is less than— (A + 1)Q[/A, where Q 1denotes the excitation energy of the first excitated state of thenucleus hit.One can see that two discrete values of E can be obtained from Equation (3.21) ifVe 0cosij > Ve 0(COS 2 IJ + a 2 - n + A(A + uq (3.22)Thus, in the region
51the secondary neutron can appear with either of two energies. This region is called thedouble-valued region. If the condition (3.22) is not satisfied only the positive sign in theRHS of Equation (3.21) gives a physically realistic solution.The angles for the inelastic scattering are selected nearly exclusively from differentia!cross-sections presented in terms of the center-of-mass angles. The transformation into thelaboratory angle is given by:whereg + (cos-Q)v mCOS-O == — 7 = = —=r (3.Z.5)Vl + 2g(cosi c »,, mF g 21A(A + I)QFor the actual angle (or cosine of angle) selections, few data are available on the angulardistribution.In the center-of-mass system scattering is nearly isotropic for the low- <strong>and</strong> intermediateenergy (Sl MeV) neutrons, thus the differential cross-section is frequently represented bya low-order (N £ 6) Legendre polynomial expansion:tT cm(E 0,p. cm) = ^ 2 (2n + Df n(E)P n(JO (3.24)where a(E) is the average cross section of inelastic scattering <strong>and</strong> f n(E) is the expansioncoefficient to be recorded in the cross-section library (f~, = 1).Recipes for selecting scattering angles from tables of Legendre polynomials are giver,in Appendix 3D.The scattering may be highly anisotropic if only one excitation level is considered. NoIall energy levels can be treated individually. In the statistical gas model, the excitation levelstructure is replaced by a continuum. The energy of the secondary neutron is selected froma density function:P(E) = C 1EeXPt-C 2(E 11)E], O *, E < E 11,where C 1is a normalization constant, C 2(E 0) is an empirical function, depending on thetarget nucleus, <strong>and</strong> E mis the maximum energy of the secondary neutron.An actual selection scheme is given in Appendix 3D.4. Scattering of Thermal <strong>Neutron</strong>sAt the end of the slowing down process the energy of the neutron becomes comparableto the thermal motion energy of the atoms (or molecules) of the target material. Then theneutrons can either lose or gain energy during collisions with the target nuclei. In a completetreatment, thermal scattering is influenced by such factors as interference between the targetatoms or chemical binding. Generally, the phenomenon is treated with the free gas model'"where the two minor effects mentioned above are neglected.
52 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> CalculationsIf there is no absorption, the energy of the thermal neutrons follows the Maxwelli<strong>and</strong>istribution;f(E) - ~ J . | exp(-EVkT) (3.25)VTf kT Sj kTwhere T is the temperature [K] <strong>and</strong> k is the Boltzmann constant.Even if there is a weak absorption, the Maxwellian distribution is still a good approximation,however the spectrum is shifted towards higher energies. 46This shift can be describedby using a temperature higher than that of the scattering medium.The differential cross-section CT(E„—> E, cosif) is also derivable from the free gas model. 4 'In several <strong>Monte</strong> <strong>Carlo</strong> codes the effects of thermal motion <strong>and</strong> chemical binding aresimulated in great detail. From among the most important programs let us mention here theVIM (developed at Argonne National Laboratory) <strong>and</strong> the MCNP (Los Alamos NationalLaboratory). 19In a simpler approximation, the new energy is frequently selected from Equation (3.25)<strong>and</strong> uniform scattering in the laboratory system is assumed.An effective method is to use few thermal groups (one, in the extremity) with presetthermal energies <strong>and</strong> cross-sections.If the thermal neutron group has an upper energy limit (or cut-off energy) E*, the densityfunction has the following form:f(E),- , exp(-E/T), if 0 E < E*Tv 'it v TP-O(E- E*), if E 3= E*where2 r IE dEP = — /-exp(-E/T) —Vtt JB«Y TTThe truncation prevents the thermal neutrons from having higher energies than the thermalcut-off.A selection scheme for the truncated Maxwellian distribution is given by Lux. 33In another paper of Lux 36a sampling scheme is presented to select the outcoming energyfrom the ingoing energy of a thermal neutron. The actual scheme is described in Appendix3B.5. FissionMany high atomic number nuclides decay after absorption of neutrons, with the simultaneousemission of high-energy secondary neutrons. The great majority of these neutronsis emitted within a few microseconds of the fission event. Delayed neutrons, both the yield<strong>and</strong> energy of which are lower, are generally of smaller importance.The average number of the secondary neutrons (v) is about 2.3 to 2.9 for most nuclidesof interest <strong>and</strong> depends on the target as well as on the incident neutron energy.For 2 3 5 U <strong>and</strong> thermal neutrons v — 2.43 is commonly accepted, a table for severalelements <strong>and</strong> energies is given in Reference 28 <strong>and</strong> reprinted in Reference 8.In a <strong>Monte</strong> <strong>Carlo</strong> game the actual number of the secondaries can be selected in a
53straightforward manner: select 3 neutrons with a probability of (v - 2) <strong>and</strong> 2 with aprobability of (v — 3).The energy of the fission neutrons can also be approximated by the MaxweJlian distribution,with appropriately selected temperatures. For 2 3 5 U <strong>and</strong> thermal fission k'T 1.290MeV gives the best fit. 8Watt 43published the following fission energy formula:f(E) = 0.484 exp(-E)sinhV2E (3.26}where E = E/E c<strong>and</strong> E 0= 1 MeV.A slightly modified fit is given by Cranberg. 12His expression for the energy distributionof the neutrons emerging from thermal fission of 2 3 5 U isf(E) = 0.4527 exp( - E/0.965) • sinhV2.29E (3.27;A selection scheme for the distribution described by Equations (3.2.6) <strong>and</strong> (3.27) is givenin Appendix 3C.It is usually assumed that fission neutrons are emitted isotopicaily in the laboratorysystem. High energy neutrons may cause fission events in which one or two of the emergentneutrons may have been scattered inelastically rather than emitted. Treatments for suchsecondary neutrons are suggested by Carter <strong>and</strong> Cashwell. 76. (n,2n) <strong>and</strong> (n,3n) ReactionsThe cross-sections of the (n,2n) <strong>and</strong> (n,3n) reactions are very small or rather negligiblein comparison to that of inelastic scattering. Furthermore, the thresholds for these reactionsare at high energies for most materials of interest. If the reactions are not neglected, thecorrelation between the energies <strong>and</strong> the scattering angles of the secondaries is generallyignored. Thus, the same selection procedures can be applied as for the inelastic scatteringIt should be, however, noted that this independent sampling yields unbiased results only onthe average, at the individual event simulations the conservation laws may be violated.7. Charged <strong>Particle</strong> Producing ReactionsCharged particle producing reactions, such as (n.p), (n,a) or (rt,np) may be importantif the target is composed of light nuclei. For example the (n,a) cross-section of Be, N <strong>and</strong>O may exceed that of the inelastic scattering — for the same elements. However, theseinteractions are considered as absorption events, if only histories of neutral particles arefollowed.8. Cross-sections in the Unresolved Resonance RangesProbably the greatest weakness of modem <strong>Monte</strong> <strong>Carlo</strong> codes lies in the cross-sectionuncertainties, <strong>and</strong> especially in our inability to measure or use cross-sections in the unresolvedresonance range. 19Let us illustrate the problem of extremely large storage requirements by an examplegiven by Levitt. 33Over the energy range of 30 eV to 25 keV, approximately 33,000 resonancesexist in the cross-sections of 239 Pu. To describe each resonance adequately wouldrequire about 8 points per resonance, for each of the total, scattering, <strong>and</strong> fission crosssections;<strong>and</strong> the corresponding energy. This amounts to about one million words of computerstorage! Thus, the use of point cross-section data is restricted to computers of extremelylarge capacity.The most commonly used method is the probability table method invented by Levitt."
54 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> CalculationsThe cross-sections at a given energy are represented by a distribution function whose meanvalue is the infinite dilution smooth average of the energy dependent cross-section. Thedistribution functions are given in tabular form. These tables are called cross-section probabilitytables.Values of the probability tables are obtained from "ladders produced about a smallenergy range, sufficient to contain 50 to 100 resonances, insuring an adequate sampling ofresonance interference <strong>and</strong> overlap effects while preventing significant variation in the energy-dependentaverage parameters." 33In most of the practical applications a table size of10 probabilities is enough. In the calculation, when a neutron enters the unresolved resonanceregion, the cross-sections are obtained by r<strong>and</strong>om selection from the appropriate probabilitytable — following the general sampling rule given in Section 2.I.D."The probability table method assumes that the resonances are so close together thatthe neutron enters a resonance r<strong>and</strong>omly, <strong>and</strong> that the resonances are sufficiently narrow toignore successive collisions in the same region." 33F. DIRECTION COSINES OF A PARTICLE AFTER SCATTERINGIn the previous subsections different types of scatterings were briefly discussed. Generallaws governing the scattering of the particles at various interactions were described <strong>and</strong>several actual recipes for selecting the scattering angles are given in the Appendices of thisChapter.One task remains to be done: to compute the new direction cosines, u>l, u>' y, <strong>and</strong> u>', inthe Cartesian system, if the pre-collision cosines: co x, w y, to 2(to 2 + to 2 + to 2 = 1) <strong>and</strong> theangle of scattering (•&) as well as the azimuth (x) are assumed to be already known. Thistransformation needs only geometrical considerations, thus the derivation is omitted here.From the several formulations (naturally, differing from each other only in notation) that ofSreider et al. 43is given here:m' z— W 2COSiJ + acosxto' = -—-—r (w yB +] - It) 7to xasinx)<strong>and</strong>1W X= ~ (W xS - WyCtsinx)1 — (JUwherea = (1 - to 2 )" 2B = cos"f> — oi 7u>' 7<strong>and</strong> the azimuth x is assumed to be distributed uniformly over (0,2TT).G. SCORINGSince the whole treatment here is based on the completely analog simulation of thephysical processes, scoring has to be done in the same manner: according to the physicalprocess studied. Therefore, there are at least as many scoring possibilities as physicalquantities to be determined.There are cases when more than one possible way exists to estimate the same quantity.Let us illustrate with the example of the flux integral, i.e., the flux integrated over a certain
SSspace region. According to the two different definitions given in Section 2.11.C the programmercan calculate the flux integral in two ways:1. To store score contribution of 1/cr before the simulation of every collision taking placein the region of interest, or2. To sum up the chord lengths of the paths in the region.(Needless to say the first method cannot be used if the flux integral is to be calculatedin a region containing vacuum.)Reaction rates, net currents, etc. can be compiled in similar straightforward manner, bysimply registering the occurrence of the events investigated.From the quantities used in dosimetry kerma (or kerma rate) is calculated most easilythe difference between the energies of a particle before <strong>and</strong> after collision is just the ' 'kineticenergy released to matter" at the collision site. Absorbed dose can exactly be computedonly by codes in which the histories of the charged particles are also followed.Let us briefly mention here another quantity which will be repeatedly discussed severaltimes throughout this book. That is the fiux-at-a-point. The importance of it needs noexplanation. In measurements one can produce very small, "point-like" detectors, however,if the sensitive volume of the instrument is too small, large times are needed to achieveacceptable statistics. In the case of <strong>Monte</strong> <strong>Carlo</strong> simulations the same method is triviallyusable: to surround the point of interest by a small but finite space element <strong>and</strong> to computethe flux integral in it. However, the difficulty with the statistics is aggravated in the numericalsimulations since the required computer time may exceed even hours or days. Thus, othermethods are preferred — <strong>and</strong> given later.II. PLAUSIBLE MODIFICATIONS OF THE ANALOG GAMEIn the previous Chapter, the whole <strong>Monte</strong> <strong>Carlo</strong> game was based on an as precise aspossible simulation of the physical processes. The application of such a method will necessarilylead to correct results — to the extent that the physical laws governing the r<strong>and</strong>omwalk of the particles are well known <strong>and</strong> correctly built into the actual computer program,Reliable final results, however, can be reached only after averaging many individual scoresobtained during the individual simulations.There might be many paths that end before they have made arty contribution to thescore. It is worth recalling here that the situation is the same again as in experiments:generally only a fraction of the emitted particles reaches the region of interest. In the physicalmeasurements if the count rate in a detector is very low, long detection times, or manyrepetitions of the experiment are required to obtain good statistics. Similarly in the numericalexperiments many particle histories have to be simulated in order to reach a reliable estimateof the quantity of interest. However, even in the fastest modern computers, the numericalsimulation of a long series of collisions <strong>and</strong> transitions requires an incomparably longer timethan the total flight time of a physical particle. A necessary — necessary from the point ofgood statistics — increase in the number of simulations might frequently lead to prohibitedlylarge computer times <strong>and</strong> thus the possibility of solving complex problems by analog <strong>Monte</strong><strong>Carlo</strong> method would be out of the question.This problem motivated — from the very beginning of the <strong>Monte</strong> <strong>Carlo</strong> applications —efforts to find methods which modify the analog simulation process in such a way that:• More particle simulations have non-zero contributions to the score, than in the analogsimulation,• But these individual scores differ just so from the analog ones that the expected resultsof the analog <strong>and</strong> the modified simulations be identical.
56 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>; <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> CalculationsModified simulation processes are generally called nonanalog games <strong>and</strong> the scoresleading to finally correct answers in the nonanalog games are called unbiased estimators.Nowadays a lot of different nonanalog game types <strong>and</strong> corresponding unbiased estimatorsare known <strong>and</strong> used. (It should be mentioned here, that unbiased estimators differing fromthe physical scores can be joined also to otherwise analog simulations, but this is rather atheoretical remark than a practical suggestion. Anyhow, examples illustrating this point willbe given in Section D of this Chapter.)The introduction of the more sophisticated efficiency increasing nonanalog methods, orrather the proof of their unbiasedness requires complicated mathematical manipulations <strong>and</strong>thus will be discussed in the subsequent Chapters of this book. There are, however, severalvery simple, <strong>and</strong> at the same time very effective, methods that can be easily understood ona heuristic basis. Such plausible techniques will be described in the following.In all the modified games the numerical experiments follow /weHtfo-particles which haveno analogs in nature, however, just for brevity, they will still be called particles.A. REPLACEMENT OF ABSORPTION AM) LEAKAGE BY STATISTICALWEIGHT REDUCTIONIn the description of the analog simulation processes we have seen that the r<strong>and</strong>om walkof a particle is terminated basically by three events:• If the particle is absorbed• If it leaves the region of interest <strong>and</strong> there is no possibility of its return• If the energy of the particle decreases below preset limitThe termination by the first two criteria can be avoided by the introduction of so-calledstatistical weights (or simply weights).In the simplest case, the weight is unity at the start of the simulation (at the emission):W 0= 1<strong>and</strong> is multiplied by the ratio of the nonabsorption <strong>and</strong> total cross sections at every collision,thus after the i-th interactionW 1- W (3.28)0"where Wj is the weight before the i-th collision. Absorption is not simulated, all particlessurvive all interactions but at the scoring the new, non-analog score (f oa) is used:f = Wf (3.29)where f awould be the score in the analog game <strong>and</strong> W is the actual weight. Otherwise, thenew energy <strong>and</strong> direction of flight coordinates are selected in the same way as they werefor scattering events in the analog simulation.Heuristically, one can imagine that a fraction of the particle was absorbed, <strong>and</strong> the otherfraction — the less than unit weight represents how large this latter fraction is — continuesits r<strong>and</strong>om walk.Similarly, if the geometrical region is finite <strong>and</strong> the possible path continues in vacuumin a certain direction, then the particle has a leakage probability (p,) of(3.30)
57where R 11is the distance to the region boundary. Instead of simulating the escape one canmultiply the weight of the particle leaving the (i-I)-St collision by the non-escape probability(1 - p), thus the weight of the particle entering the i-th collision becomesW; - W,_,(l - p) (3.-51)In such cases leakage of the particle is to be precluded <strong>and</strong> the next free path (R) has to beselected from the distorted, nonanalog density:P(R)p(R) = — , 0 R =5 R 0where p(R) is the path length density given in Equation (3.1).Trivially, the modified score is still the same as in Equation (3.29), since from the pointof simulation there is no difference whether in a particle's history the absorption or theleakage is replaced by weight reduction. In the previous case a fraction is considered asabsorbed <strong>and</strong> the other fraction (the remainder) is scattered, now a fraction leaves the region<strong>and</strong> the other fraction is artificially kept in the region. In both cases the second fractionwith its decreased weight — continues its r<strong>and</strong>om walk. Now if both absorption <strong>and</strong> leakageare replaced by weight reductions the resultant weight modification for a particle's flightbetween leaving the (i-l)-st <strong>and</strong> leaving the i-th collisions follows from Equations (3.28)<strong>and</strong> (3.31) as:W 1= W, ,(1 - p,)'-The simple multiplication of the two weight modifying factors indicates that the replacementof the absorption (during the collision) <strong>and</strong> the leakage (between two possiblecollisions), by weight reductions are mutually independent events.The demonstration of the variance decreasing effects of these two simple methods isthe task of another Chapter of the book (namely, Chapter 5. VIII), it should only be mentionedhere that in most computer codes absorption is replaced by weight reduction, whereas thenon-escape modification is seldom used, mainly because it often increases the computingtime to such an extent that the resulting efficiency is decreased. Computer time is increasedby the greater number of collisions to play in a game without leakage <strong>and</strong> also due to thesimple practical reason that the execution of the integral in Equation (3.30) for complexgeometries may waste more computer time than earned by prevention of the escape ofparticles.Finally, we should like to comment here, why the third paragraph of this point wasstarted with the words: "In the simplest case . . . " There is a possibility to start with anon-unit weight even at the emission. If the sampling from the source Q(r,E,w) is alreadydifficult <strong>and</strong> one can find another density function Q(r,E,&>) from which the selection iseasier, Q can be used for selecting r„, E„ <strong>and</strong> w„ <strong>and</strong> an initial weight ofQ(F 0 5E 0 1W,,)W 0= ff- *• °' (3.32 >CKr 01E 01CO n)has to be assigned to the particle. Trivially, Q must have non-zero value, wherever Q JKnon-zero. * The question whether such a source biasing is finally efficient or not depends* This non-zero condition is necessary not because of the hazard of singularity, but to ensure an adequate sampling(see Section 3.11. C).
58 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationson the balance between the time gain achieved by the introduction of the simpler densityfunction <strong>and</strong> the increase of the statistical uncertainty caused by the fluctuation of the initial(<strong>and</strong> inherited to all successive) weights.B. REPLACEMENT OF MULTIPLICATION BY INCREASE OF THE WEIGHTIn neutron transport in presence of fissioning materials v progeny neutrons with independentlydistributed energies <strong>and</strong> isotropic direction distributions can be released by fission.In the analog game first an actual integer value of n (see Section 3.I.E. point 5.) then nenergies <strong>and</strong> directions are selected <strong>and</strong> all the n neutrons are followed individually. Instead,one can choose a single energy <strong>and</strong> direction <strong>and</strong> follow a single progeny with a weight ofv — the expected value of n — times the weight the incident neutron that caused the fission(times the non-absorption probability, if absorption is replaced by weight reduction).Similarly, at pair-production interactions of photons, from the annihilation of the producedpositron two photons with the same energy are emitted. Here, again it is moreconvenient to follow a single photon with a starting weight of twice the weight of the incidentphoton (times the nonabsorption factor — if it is applied).C. RUSSIAN ROULETTE AND SPLITTINGThe purpose in introducing the weight was twofold. In Section A loss of paths byabsorption or leakage was prevented, in Section B unnecessary multiplications of simulationswere avoided. There may, however, be cases when just the opposite is profitable for theuser: unimportant paths should be stopped, or — in important regions — more independenthistories are needed than are at disposal.By the absorption <strong>and</strong>/or leakage replacement method the weight of the particle monotonicallydecreases <strong>and</strong> may reach very small values: following it any further is more orless a waste of time, since it will surely have only small contributions to the quantity to bedetermined (see the scoring formula [3.29]). In such cases the Russian roulette method canhelp. Let us decide that if a particle's weight (W) falls below a preset minimum W tn, weeither restore its starting (or any other preset) value, W 0, <strong>and</strong> continue its path, or we killit. The process is trivially correct if the survival probability (p) isp =Ww:<strong>and</strong> the history is terminated with a probability 1-p. In an alternative way, one can fix thesurviving probability p (), <strong>and</strong> increase the weight of the survivors toWW„ ew= -PoSince the importance of a particle depends not only on its weight but also, for example,on the region where (e.g., how near to the detector) it is, different minimum weights, orsurviving probabilities can be set to different regions.On the other h<strong>and</strong>, in very important regions we can increase the number of historiesby splitting the entering particle into several "fragments" which are afterwards followedindependently. If the particle is split into n new ones, "n for one splitting", the new weightis triviallyfor each progeny.Ww new= -n
59By this technique the number of events <strong>and</strong> the number of score contributions is increased,which — assuming that splitting is applied really in important regions - increases theefficiency, even in spite of the increased number of simulations.It is worth noting that the above-described trivial ways are not the only possibilities.Splitting <strong>and</strong> Russian roulette are treated in full generality in Chapter 5.III.Russian roulette <strong>and</strong> splitting may — <strong>and</strong> frequently are — used together. In complexgeometries, sometimes each region can be assigned an importance. 23Then, when a panicleenters region n + 1 from region n, <strong>and</strong> the ratio I n, ,/I n> 1. the particle is to be split infov = I n+1ZI npieces, otherwise Russian roulette is to be played by a survival probability ofp = I n +,/I n. If v, in the splitting, is not an integer, one can either choose the nearest integer,or to split into n = ent(v) with a probability of n 4- 1 — v <strong>and</strong> into n = entOf) + 1 witha probability of v — n.In the previous paragraph we already assumed that importances can be assigned to certainregions of phase space. Such importances, however, can be exactly specified only if theproblem is solved. Thus, in a first step one can use estimated values. Such estimates car.be derived from non <strong>Monte</strong> <strong>Carlo</strong> (e.g., discrete ordinate] calculations carried out forsimplified problems, or the user can set ad hoc values based on his earlier experiences withmore-or-less similar problems. Sometimes the first estimates of the importances are successivelycorrected after a smaller number of simulations <strong>and</strong> the computation is followedby the better estimates.In the solution of real physical problems, with different materials in different zones;energy dependent cross-sections; region, energy <strong>and</strong> direction dependent importances; theproper selection of the survival <strong>and</strong> splitting criteria may strongly influence the efficiencyof the calculation <strong>and</strong> is a hard task. Investigations on finding optimum or near optimumparameters will be given in Chapter 7.II.I). EXPECTED VALUES IN SCORINGThe replacement of absorption by the reduction of the artificially introduced weightparameter, from a certain point of view, is equivalent to the analytical calculation of theexpected value of a r<strong>and</strong>om process.Specifically, if we assign a score of 0 to an absorption <strong>and</strong> 1 to a scattering event, <strong>and</strong>we know that the probabilities of their occurrences are aja <strong>and</strong> a/a, respectively, then theweight reduction factor:cr — cr,, CT S1 •
60 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>; <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> CalculationsFIGURE 3.3.A sketch of expected leakage scoring.Better results can be achieved if we sum up the probabilities after every collisionconsidering the entrance on the x = 0 surface as the 0-th collision, that the particle reachesthe x = X surface without any more collision. The contribution to the score after the i-thcollision is thenf, = W 1expX - x,l-0-(E 1) ' , if to xl> 0 (3.33)<strong>and</strong>f, = 0, if w xl0Here, ail the positively oriented paths make their contribution to the transmission probability,however, due to the possibly large deviations in the exponents the score contributions maybe very different for different histories, which results in large variance of the score. Thusfor very deep penetration problems the application of this scoring method alone does nothelp.There are, however, thicknesses where the application of the expected leakage scoringtechnique increases the efficiency.2. Point Flux EstimationAnother very important problem arises when one wishes to calculate the flux~at-a-point.Let us briefly recall the definition of the flux: it is the number of particles crossing thesurface of an infinitesimally small sphere divided by the cross-sectional area of that sphere.Clearly, there will be no actual paths crossing an infinitesimal sphere, however, flux contributionscan be calculated via the sphere-crossing probabilities. Let us consider a particleentering the i-th collision at P with energy E 1, weight W 1<strong>and</strong> direction co,. Let D be thedetector point <strong>and</strong> da the cross-sectional area.The probability that the particle reaches the sphere is a product of two probabilities:1. The scattering event turns the particle to the proper direction2. There are no additional collisions along the PD path
61R-PDFIGURE 3.4.Geometry for the point flux calculation.Thus, if C(E,, to, -» w H,)dO = C(E 1^1)(IfI denotes the probabilitentering the collision at P will be scattered into the solid angle Oil arount .,is the optical distance between P <strong>and</strong> D. then the probability of crossingdp, = W 1 +,C(E if-&)dO • expl-T(E ; +,)JFor the contribution of a single collision of one particle this probabiL.j - ,>•>•• K"number of particles" in the definition of the flux, therefore, the flu* >.i,.ifi?v •the investigated collision is¢, = 4» = W 1 + 1C(E 1^) 6XpI-T(E 1 +,)] °-dacia_W^AEj.^expt-TfEj,,)]R 2^ ' ^ 'i.e., we have got a non-zero contribution formula. The only problem witis the R 2in the denominator, which means that one can obtain infinite cdetector is not surrounded by a vacuum. This divergence is a very seriouquestion of point flux estimators will still be discussed several tiroes in tinM> '3. Comments on the Two ExamplesFirst, we should like to call to the attention of the reader that the two examples presentedabove represent, in a certain sense, two basically different cases: expected values cars bederived either before or after the collisions. In the first case averaging is executed, over thepossible post-collision points, whereas in the second case the averaging is extended to theafter collision directions <strong>and</strong> the post-collision sites. <strong>Methods</strong> where these two ways arecombined will be presented in Chapter 6.1V.A second comment, which is absolutely trivial but perhaps wort't
62 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationsvacuum\\O Q XS\\\materialmaterial2\vacuumFIGURE 3.5.An illustration of the problem of omission of rare events.E. PROBLEMS WITH EXTREMELY RARE EVENTSIt was already mentioned in Chapter 3.1 that total omission — in an actual series ofsimulations — of events with extremely low probabilities but high contributions may leadto false results.The same problem may arise in the modifications, too. Let us just extend example 1 ofthe previous point to a slab of two layers with different materials having different scatteringcharacteristics. If the first layer is very thick, it has a high probability that all simulatedcollisions occur in it <strong>and</strong> thus the calculated angular distribution of the transmitted particleswill trivially be false, since there will be no information taken from the scattering laws ofthe second material.There is a similar danger in the application of biasing. The biasing process may resultjust in the opposite type of error than the neglect of the physically rare events. For example,if the modified source density Q(r,E,w) is much smaller than the exact one Q(r,E,w) overa certain (r,E,co) domain, one may have no point at all selected — in an actual calculation— from that domain <strong>and</strong> thus there is no chance for the correction according to Equation(3.32), i.e., the result will be false. The word "false" was intentionally used here insteadof "biased". This is not a classical example of a biased result, since if the number ofsamplings is extremely high (usually not realizable in practice) there will be no error exceedingthe statistical uncertainties.In the actual computations both the very likely full omission of the rare events <strong>and</strong> thevery improbable but accidentally possible selection of them in a small sample will result inincorrect results. (A nice numerical example is given in Chapter 2.5 of Reference 39.)III. STATISTICAL CONSIDERATIONSAs has already been discussed at the very beginning of this Chapter, r<strong>and</strong>omness characterizesthe migration of the particles. Therefore all results either by measurements or by<strong>Monte</strong> <strong>Carlo</strong> simulations have to be presented by two values: the average <strong>and</strong> the st<strong>and</strong>arddeviation. The latter characterizes the uncertainty of the average.In an analog numerical experiment with n simulations one may per se expect the sameuncertainty as in a physical experiment in which the measuring time is selected such that nparticles are emitted. (The "same uncertainty" does not mean exactly the same estimatedvalue of the st<strong>and</strong>ard deviation, since due to the r<strong>and</strong>omness even the empirical st<strong>and</strong>arddeviations fluctuate around the theoretical value.)
63In the following Sections, an elementary treatment of the statistical uncertainties isgiven. Derivations of the formulae given as well as more thorough discussion of their validitycan be found in many textbooks on probability theory <strong>and</strong> statistics." 16 - 29 - 40A. THE CENTRAL LIMIT THEOREMLet us consider n independent r<strong>and</strong>om observations, p.,, jx 2, . . . , ix nof a r<strong>and</strong>omvariable. Assuming that this r<strong>and</strong>om variable (cp) is a function of t, with a PDF p(t), theexpected value of cp is defined byM(cp) = f cp(t)p(t) dt(3.35¾The real meaning of t in our case is quite general, it symbolizes a variable by which all thepossible r<strong>and</strong>om paths can be parametrized.The variance is defined as:D 2 (cp) = M(Cp 2 ) - [M(Cp)] 2If one estimates the expected value by the average of the n samples, i.e., byM(cp) = M-,1 "X M-,n , ,then according to the law of large numbers the average |i approaches the expected valueM(cp) with a probability that approaches 1 as the sample size increases (n —» °°).More precise information on the convergency of the estimation is given by the centrallimit theorem.Given the n observations described abovelim Pa^ Vn ^ b] = -j= Pe- 2 ' 2 dt (3.36)D(cp) J \/2tt J.where P{x} denotes the probability that x is true. Equation (3.36) means that the average ofn independent observations of a r<strong>and</strong>om variable (with finite mean <strong>and</strong> variance) approachesa normal distribution.Substituting a = — 1 <strong>and</strong> b = 1 into Equation (3.36); the probability thatIfI n- M(cp)| > D(cp)/\/nis about 32%. The probability that, for example, the difference between the average <strong>and</strong>the expected value exceeds 3D/\/n is only 0.27%.In practice Equation (3.36) is not directly evaluable since the variance D 2 (cp) is notknown in advance. A method to estimate it is given in the next Section.IL THE ACTUAL COMPUTATIONSAt the actual computations histories of n particles are followed resulting in scoresM-!, u-2> • • • ,M-n- The definition of the average is:
64 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationswhereas the variance can he empirically estimated by the square of the st<strong>and</strong>ard deviation(s).n - 1 E (m - Ad2 (3.37)Equation (3.30) is an unbiased estimate of D(cp), i.e.M(s 2 ) " D 2The st<strong>and</strong>ard deviation of the mean(sji) is an unbiased estimate of D/'Vn:S (m-, - fx) 2 (3.38)Vn V n ( n ~ 1) .«This formula is hardly applicable in an actual calculation, since evaluation of the subtractionson the K(IS assumes the storing of all |x rs up to the end of the run. A moreconvenient formulation is achieved by elementary transformations:nis2 (P-. - M-) 2 = 2 (P-? - 2 P-.M< + p-) 2= Eft + n — ( X P-i= S ft 2 - - ( X ^This latest formulation drastically reduces the store requirement: one has to store onlythe sums of the scores <strong>and</strong> their squares.Now, the empirical st<strong>and</strong>ard deviation is computed as:1n(n - 1)(3.39)Frequently, the relative st<strong>and</strong>ard deviation, or coefficient of variation, is given. It isdefined by the relations,. =<strong>and</strong> hence can be computed ass,. =n - 1S Pin.(2 (i,,) 2 n JDuring the simulation of the history of even a single particle, the score may be obtained
65as a sum of many contributions. If the i-th particle undergoes m interactions, with !,.contributions, each, then the score isniNaturally, for the statistical evaluation the score ((X 1) is to be h<strong>and</strong>led as an independentestimate, its composition from the f Mcontributions is not of interest.C. THE EFFICIENCYFrom the computational point of view, it is not the variance itself but the computer timerequired to reach a given variance that should be reduced by the introduction of nonanaloggames. A modification of the analog game will certainly change the average time requiredby the individual simulations.It follows from Equation (3.38) that if the st<strong>and</strong>ard deviation of the mean (the quantitywhich characterizes the statistical uncertainty) is limited to s u>than the minimum numberof simulations isif s 2is the variance of the method. If the average time per simulation is denoted by t, thena computer time of(3.40)is consumed during the total game.If one compares techniques, the error limit (s c) is fixed, thus the time in Equation (3,40)is proportional to product of the variance square <strong>and</strong> the average time per simulation. Theinverse of this product is called the efficiency:better.In the comparison of two techniques, that with higher efficiency is considered to be theA detailed analysis <strong>and</strong> comparison of the efficiencies of a wide range of techniques isthe task of Chapter 7.APPENDIX 3A: ENERGY SELECTION FROM THEKLEIN-NISHINA FORMULAAs has been stated in Section 3.1.D the differential ;is generally approximated by the Klein-Nishina formula, dr rfor initially free <strong>and</strong> at rest target electrons.
66 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> CalculationsFrom Equation (3.9), the PDF of the ratio (x) of the energies of the photon before <strong>and</strong>after collision (a„ <strong>and</strong> a, respectively) isH A +BC~>if+ 2aP(x)0,otherwise(A.l)where the reader should be reminded thatX =A =ajaHalB = 1 - 2(a„ + l)/a„C = (1 + 2a 0)a 2 ,D = 1H is K/a*, the value K was given in Equation (3.9), the total cross-section cr* in Equation(3.10). However, the actual value of this normalization factor has no importance for theselection procedures.There are many procedures that may be used to select samples from the PDl- (A. 1).The five basically different types of sampling methods applied are1. The rejection technique2. Solution of the inverse cumulative distribution function (CDF) by numerical approximation3. Creation of approximate formulae for the inverse CDF4. Use of an approximate inverse CDF coupled with correction by a weight adjustmentfactor5. Direct samplingSeveral procedures are cited in Reference 31 <strong>and</strong> also compared in Reference 4.In the following we describe two methods only. The first one (A), is a combination oftwo techniques <strong>and</strong> is found to be the fastest method containing no approximation. 4Thesecond method (B). is extremely simple but is proposed for uses in codes where the exactnessof the new energy selection is not crucial since it is based on an approximate fit of theinverse CDI-.A. COMBINATION OF THE DIRECT SAMPLING AND REJECTIONTECHNIQUESThe only selection procedure which uses neither approximation nor rejection is the directsampling method proposed by Koblinger. 31This direct sampling is a combination of theprobability mixing <strong>and</strong> the inverse cumulative distribution methods.
67Let us express the PDF A.l as a sum of four terms:P 1(X) =HABP 2(X) = H -P,(x) H ~"<strong>and</strong>Dp 4(x) - 11-:The probabilities for the selection of the term (see Section 2,1.6) arePi ' P< H2p 2= H(l^ 4 V n P<strong>and</strong>Hwhere2rv<strong>and</strong>7 = 11The selection of the i-th term is carried out as given in Equation (2,1), however thewhole probability mixing method is applicable only if all p s(x)-s are non-negative functions.This condition is automatically satisfied for p,, p 3<strong>and</strong> p 4but,p 2(x) ss 0 only if a 0» 1 + V3 (A.2)If the condition A.2 is satisfied <strong>and</strong> the i-th term is selected the inverse CDF methodcan be applied for each of the four terms. The actual recipes arex = 1 + 2cxp for i = !x = fJ p for i = 2ft1 + 2apfor i = 3<strong>and</strong>x = (1 - yp)~" 2 for i
68 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculations> Select p,, p,, <strong>and</strong> p,
mwhereS=*LI + 0.5625 a,,The applicability of the method can be extended 6 up to about a., = K) (t. > : 5 McViby adding the term0.5(a o- 4) - p 2 (i - p) 2to the RHS of Equation (A.3).APPENDIX 3B: THERMAL NEUTEON ENElGY SELECTIONIn most codes thermal neutrons arc hardiej in orthere is no actual continuous energy change ;of the energy of the scattered neutron froixits pre-collision energy. Selection schemes >ui *}}> " • , (on. * . »A. SELECTION FROM THE MAXWELLIAN DISTRIBUTIONIn the free gas model with no absorption, the thermal neutrons hav « >&"• 1-distribution of Equation (3.25). The probability density function can2p(R) = -7= VR exp(-R) 0 « R < cx; (BA,where R is the energy in kT units.below.There are many procedures for sampling this distribution, two of them are1. Selection from a \l DistributionOne of the easiest sampling methods 34 is based on < >distribution with 3 degrees of freedom) has the same fa:a Maxwellian distribution one has to choose 3 independeidistribution with an expected value of 0 <strong>and</strong> unit varianceof the X 2distributions:P(Xl < y) = - 4 = |Vte- [ 'V 2 TT •'OThe PDF is2dt y >02p(R) -= — VR e" R d RV TTif t is replaced by 2R.Thus, the estimate of R isR =4 2p f
70 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> CalculationsSelect p,, p 2, P 1, <strong>and</strong> p,P 1> 0.15536*yesComputeR = p,* p,ComputeR=I- logp,p, > exp(-R) >P 1> "vR f>yesR = R- logp„* Exactly: ———, where e is the base of the natural logarithm.0.5 + eFIGURE 3B. 1. The flow chart for selecting the energy from the Maxwellian distribution.where p ;-s are independent samples from the Gaussian distribution. The fact that the selectionof normally distributed r<strong>and</strong>om numbers is rather time consuming makes this process inefficient.2. Selection from a Gamma DistributionSelection schemes can be based on recipes developed for the gamma distribution. Thegeneral gamma distribution is given byP(R) = FT"; R T r ~ 1 e" X x1 (Tl)which turns into the form of Equation 3B.1 if X = 1 <strong>and</strong> if) = 3 A 2. The selection schemegiven by McGrath et al. 3sis presented in Figure 3B.1.B. NEW ENERGY SELECTION FROM THE DIFFERENTIAL THERMALNEUTRON CROSS-SECTIONStill preserving the free gas model with no interference between the scattering atoms<strong>and</strong> no chemical binding effect the differential scattering cross section in the laboratorysystem can be approximated as follows(j E / m, f m, / K 2 X 2 I ,„ „CT(E 0-^E.uf) = -- /— ~ exp -- ;,- E 0- E B.2^ 4-rr V E 0y] 2*. 2 1 2KTC 2 \ ° 2m,/ Jwhere m, is the mass of the scattering nucleus, m is the mass of the neutrone -- 2m(E + E 11-- 2uVEE ( )).<strong>and</strong>
71Following Erikson's results' 3the expression of Equation (B.2) can be transformed sothat the resulting PDF (the normalized cross section) consists of the product of two independentprobability variables: p <strong>and</strong> q. The new probability density function ish(p.q) = CpexpC-q 2 );B..7where C is a normalization constant,P = Vl - 2Z(x + Z 2q = [Xp + (Z 2 - l)/pimX = --m tThe new variables p <strong>and</strong> q have physical meanings only if their range consists of two sets 1 ":R(p,q) - R,(p,q) + R 2(p,q) (B.4)whereR,(p,q) = jp.q: -a < q « a, 0 < p < + 1 j ---^-}<strong>and</strong>R 2( P,q) = {p,q: a < q, (H - i) ^
72 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> CalculationsComputea = ——-(2;r + 1) erf a.2 •'Ii = s exp(-a"J,g + hSelect p,Select q withMethod Ql"'Select q with' Method Q2 ;•Select p with'" Method Pl)Select p with: "Method P2 )vCompute2pqaAp - +E - Z-R 0,u.! +7. 2 - p2/.FIGURE 3B.2. Energy <strong>and</strong> scattering angle selection for thermal neutrons.The two most frequently used approximations have basically the same form:1 .-.p(E) = - exo( - Ea) sinhx/Ebcwherec = 2a 3/2 / exp (I)V T M(Cl)<strong>and</strong>E = E/E„ where E„ == 1 MeV:;rom comparison of Equation (Cl) with Equations (3.26) <strong>and</strong> (3.27) one getsa = 1b = 2
73' s' Method Q PiSelect p,q = y - lnp, + a 2Method P!Select p ;P. yesSelect p ;i, p sSelec! pComputez = p..z = max(p 4, p 5V'2 2/. fX + !Figure 3B.2 (continued).for the Watt spectrum, <strong>and</strong>1 ./0.9652.29for the Cranberg formula.A sampling procedure based on the rejection technique is given for Equation (0. \) byKalos et al. 27 <strong>and</strong> cited by Everett <strong>and</strong> Cashwell. 14 The flow chart is presented in Figure3C.1.APPENDIX 3D: ANGLE SELECTION FOE ANISOTROPICSCATTERINGSThe selection of the scattering angle for anisotropic scattering events is one of the cruciaipoints of <strong>Monte</strong> <strong>Carlo</strong> calculations. The basic difficulty arises not so much in choosing anappropriate sampling scheme but in obtaining accurate enough input data (differential crosssections) for many elements <strong>and</strong> energies.
74 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculations' Method 02 NSelect p ;, p,. p,, p 4 ayesp, < exp -a : (2x - 1)" /Select P 1j y c sq = a(2x - 1),- (P + a£Pi1-I 2ayesq = p*( Method P2Select P 1. p,Computez = max(p,, p,)j PI a(X + 1) J jFIGURE 3B.2 (continued).The azimuth is practieally exclusively assumed to be uniformly distributed over (0,2ir),thus either direct angle sampling or the two dimensional r<strong>and</strong>om orientation sampling ofvon Neumann (see Section 2.1.J) can be applied.The energy of the outgoing particle can be determined from Equation (3.11) for elasticscatterings <strong>and</strong> Equation (3.21) is to be used for inelastic scattering — if the angle (<strong>and</strong> theexcitation energy, in the second case) is known.Therefore, in the conventional method of energy <strong>and</strong> angle selection one samples the(cosine of the) angle <strong>and</strong> then compute the energy.Many different methods have been developed, four methods are cited here.
75ComputeK=I +b8aL = - K + VKaVM = aL - 1- y Select P 1, p,Computex = -In p,y =-lnp,(y - M(x + 1))"" < bLx /yesE = E nLxFIGURE 3C.1. Energy sampling from fission spectra.The first method uses a special kind of tabulation of the angular distribution, in theother techniques the differential cross-section is exp<strong>and</strong>ed into series of Legendre polynomials.The shape of the differential cross-section curves changes with the energy of the incident,neutrons. Therefore all the mesh point data or the Legendre coefficients are to be tabulatedfor a series of energies <strong>and</strong> interpolation between these points is to be carried out for otherenergies.All techniques can be applied directly to laboratory angles or to the angles in the centerof-masssystem. In the latter case transformations given by Equations (3.16) <strong>and</strong> (3.23) haveto be carried out for elastic <strong>and</strong> inelastic scattering, respectively.A. TABLE LOOK-UP METHODCarter <strong>and</strong> Cash well 7suggest the following method of angle selection. Let the(n + 1) angles corresponding to n equally probable intervals of the cumulative distributionfunction be tabulated. Then select one of these intervals r<strong>and</strong>omly <strong>and</strong> sample the scatteringangle from a uniform density function between the lower <strong>and</strong> upper boundaries of the selectedinterval.This method is very effective. Moderate data storage is required because, by the use ofequally probable intervals, there is no need for storing the CDF values. Moreover, the meshpoints in the table are automatically dense where PDF is higher.B. SAMPLING FROM LINEAR ANISOTROPIC ANGULAR DISTRIBUTIONCoveyou developed a sampling method to choose angles from linearly anisotropic distribution.The method was first used in the 05R code. 25
76 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationsf = !fyes< 3fSelect P 1Select pP 1-(1 - 31 > -: < -A P, > /,(1 -(„)Select p Select p,, p.jj == 2p, — 1 : ; ji = 2max(p,„ p,) - 1 ! ji = 1Jl=SIgIKf 0)Jl :MGURE 3D. i. Cosine of scattering angle selection for linear anisotropic angle distribution.The PDF of a linear anisotropic distribution may be written in the form:P(ix) = ~- (1 + 3f cu.), if |3fJ - f<strong>and</strong>p(jx) = -3(1 - f„)(1 + uj + (3f() - l)S(l) , if 1 =£ |3f„] 3 (D.l)Let us assume that f e2 s0, otherwise we execute the sampling process with f„ <strong>and</strong> changethe sign of the resulting direction cosine. After elementary rearrangements of Equation (D, 1)one gets:p(jx) = (1 - 3fJ ] - + 3f„ if 3f ()« 1<strong>and</strong>3 1 + ix 1p(|x) = -(1 - U - J ^ + 2 (3f D- 1)8(^ - 1), < 3f. 3 (D.l)There are three easy ways to sample densities in Equation (3.2). First, since theircoefficients are all positive, the probability mixing method (Section 2.1.B) can be used. Theflow- char! is given in Figure 3D.1. Two other methods are given below.
C. APPLICATION OF THE REJECTION TECHNIQUE FOR THE LEGENDKEEXPANSIONLet p(u.) be the PDF of the cosine of the scattering angle <strong>and</strong> let us represent it by meansof a series of Legendre polynomials:(D.:where P,(pd is the i-th Legendre polynomial.As a consequence of the orthogonality of the Legendre polynomials:P(UdP 1(Md dp.Bending 2has introduced the four-term functionh(|x)VlC,C 2(I + p.) + C 3+ C 4(I jx) (D.4;whereC 1 / 2 !AJVIV T i = 2C 7max(a,,0)C 3C 43o0,max( — a 1(0)if ao 5= a, > 0if — a 0=¾ < 0otherwiseUnder these conditions.h(fx) P(J 1)for all fx's, i.e., the function defined by Equation (D.4) can be used as a majorant for therejection technique (see subsection 2.1. B).The normalized PDF ish*(ii) =h(ix)^H(D.:i)where H = C,tt + 2(C 2+ C, + C 4).Having obtained a sample from h*(|x), accept it with a probability of f(p.)/h(p.).The PDF h*(u.) given by Equations (D.4) <strong>and</strong> (D.5) can easily be sampled by uVprobability mixing method, since it is a sum of four simple termsD. SELECTION OF DISCRETE ANGLES FROM THE LEGENDRE EXPANSIONThe method described here was first introduced by Coveyou. 9The starting point is againthe Legendre expansion given by Equation (D.3). The result of the selection procedure is
78 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationsone of n + 1 discrete angles. Let us denote the PDF of the discrete distribution by g(uf) <strong>and</strong>the cosines of the angles by u.,, then:g
REFERENCES1. Amaldi, E., The production <strong>and</strong> slowing down of neutrons, in Encyclopedia of Physics Vol. XXXVlJ!.S. Fliigge, Ed., Springer-Verlag, Berlin, 1959.2. Bending, K. C, The organization of cross-section data in theNEARCP Meet, of a <strong>Monte</strong> <strong>Carlo</strong> study nroup. ANL 75-2 Report ram Ji , ml . « i1974, 753. Biggs, F. <strong>and</strong> Lighthill, R., Analytical Approximations for PIH., I t i >ni rn » » iSections Including Electron-Binding Effects. SC-RR-72 0659 Ri j S i i, i , ri , i1972.4. Blomqiiist. K. N. <strong>and</strong> elbard, E. M., An assessment of existi I 1 " r i " > < i ' i > >Problems, Pergamon Press, London, 1959.7. Carter, L. L. <strong>and</strong> Cashwell, E. 0., <strong>Particle</strong>-<strong>Transport</strong> Simulation with <strong>Monte</strong> <strong>Carlo</strong> Method &RVCritical Review Series, National Technical Information Service. Springfield. 1975.8. Chilton, A. B., Shultis, J. K., <strong>and</strong> Faw, R. G., Eds.: Principles of Radiation Shielding, Pmnke Hh.Englewood Cliffs, NJ, 1984.9. Coveyon, R. R., A <strong>Monte</strong> <strong>Carlo</strong> technique for selecting neutron scattering angles from anisotropic riisfcbutions, Nuci. Sci. Eng., 21, 260, 1965.10. Coleman, W. A., Mathematical verification of a certain <strong>Monte</strong> <strong>Carlo</strong> sampling technique <strong>and</strong> appiieatioofthe technique to radiation transport problems, Nuci. Sci. Eng., 32, 76, 1968.11. Cramer, H., Mathematical <strong>Methods</strong> of Statistics. Princeton University Press. Prince!12. Cranberg, L., Freye, G,, Nereson, N,, <strong>and</strong> Rosen, L., Fusion neutron spectrum », • 'n103, 662, 1956.13. Erikson, J. R., A slow neutron scattering routine from the gas model. Nuci. Sci. Eit "14. Everett, C. J. <strong>and</strong> Cashwell, E. D., A Third <strong>Monte</strong> <strong>Carlo</strong> Sampler. LA.9721.-MSNational Laboratory, Los Alamos, 1983.15. Fano, U., Spencer, L. V., <strong>and</strong> Berger, M. J., Penetration <strong>and</strong> diffusion ox X-rays, in EncyclopediaPhysics, Vol. 38/2 S. Fliigge, Ed., Springer-Verlag, Berlin, 1959.16. Feller, W., An Introduction to Probability Theory <strong>and</strong> Its Applications. Vols I. <strong>and</strong> II., John WheySons, New York, 1971.17. Fuller, E. G., Gerstenberg, H. M., V<strong>and</strong>er Molen, H., <strong>and</strong> Dunn, T. C, <strong>Photon</strong>uclear Reaction D.ISNBS Spec. Publ. No. 380. National Bureau of St<strong>and</strong>ards, Washington, D.C., 197318. Fuller, E. G. <strong>and</strong> Hayward, E., Eds.,: <strong>Photon</strong>uclear Reactions. Dowden, Hutchinson <strong>and</strong> Ross. Stronfburg, 1976.19. Gel hard, E. M., Private communication, 1987.20. Goldstein, H., Fundamental Aspects of Reactor Shielding, Addison-Wesley, Reading, (959.21. Hastings, C J., Approximations for Digital Computers, Princeton University Press, Princeton, 1955.22. Heitler, W., The Quantum Theory of Radiation, Oxford University Press, Oxford, 1954.23. Hubbell, J. H., <strong>Photon</strong> Cross Sections, Attenuation Coefficients, <strong>and</strong> Energy Absorption Coefficients h i i i » 126. Kahn, H., Applications of <strong>Monte</strong> <strong>Carlo</strong>. AECU-3259 Rep-27. Kalos, M. H., Nakache, F. R., <strong>and</strong> Celnik, J., Mont trio > dComputing <strong>Methods</strong> in Reactor Physics, Gordon <strong>and</strong> Breacn. r\e.w •.orK icon28. Keepin, G. R., Physics of Nuclear Kinetics, Addison-Wes c i u I n (29. Kendall, M. G. <strong>and</strong> Stuart, A., The Advanced Theory of jU i i < a i i i30. Kinsley. R., Ed., ENDF/B-V Summary Documentation. F ,vLaboratory, New York, 1979.31. Koblinger, L., Direct sampling from the Klein-Nishina distribution foi photon energies above > •i ivtf,Nuci. Sci. Eng.. 56, 218, 1975.32. An Integrated Sysem for Production of <strong>Neutron</strong>ics <strong>and</strong> <strong>Photon</strong>ics Calculationa! Constants. UCRL-504-Report. Lawrence Livermore Laboratory, Livermore. <strong>Neutron</strong> cross section data in: Vols. 7A (1976), *(1976), 8A (1976), 8B (1976), 9 (1970), ISA (1975), 15B (1978).
80 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculations33. Levitt, L. B., The probability table method for treating unresolved resonances in <strong>Monte</strong> <strong>Carlo</strong> calculations,M(C/. Sci. Eng., 49, 450, 1972.34. Lux, I. <strong>and</strong> Koblinger, L., An ICL Version of the 05R Program System. KFKI-73-2 Report. CentralResearch Institute for Physics, Budapest, 1973.35. Lux, I., Selecting from Three Probability Distributions for Reactor Calculations K.FKI-75-62 Report. CentralResearch Institute for Physics, Budapest, 1975.36. Lux, I., Selecting the Energy <strong>and</strong> Scattering Angle of Thermal <strong>Neutron</strong>s in Free Gas Model. KFKI-75--84Report. Central Research Institute for Physics, Budapest, 1975.37. Lux, I., Semi-continuous Selection of Scattering Angles from Low-order p„ Scattering Densities, Nucl.Sci. Eng., 82, 332, 1982.38. McGrath, E. J. <strong>and</strong> Irving, I). C, R<strong>and</strong>om Number Generation for Selected Probability Distributions.ORNL-RSIC-38 Report, Techniques for Efficient <strong>Monte</strong> <strong>Carlo</strong> Simulation, Vol. II., Oak Ridge NationalLaboratory, Oak Ridge, 1975.39. McGrath, E. J. <strong>and</strong> Irving, D. C, Variance Reduction. ORNL-RSIC-38 Report, Techniques for Efficient<strong>Monte</strong> <strong>Carlo</strong> Simulation, Vol. III. Oak Ridge National Laboratory, Oak Ridge, 1975.40. Parzen, E., Modern Probability Theory <strong>and</strong> Its Applications, John Wiley & Sons, New York. 1960.41. Persliden, J., A <strong>Monte</strong> <strong>Carlo</strong> program for photon transport using analogue sampling of scattering angle incoherent <strong>and</strong> incoherent scattering processes, Comput. Progr. Biomed. 17, 115, 1983.42. Piechaty, E. F., Cullen, D. E., <strong>and</strong> Howcrtrm, R. K., Tables <strong>and</strong> Graphs of <strong>Photon</strong>-Interaction CrossSections from 0.1 keV to 100 MeV Derived from the LLL Evaluated — Nuclear-Data Library. LLL-50900Report, Vol. 6., Rev. 2. L.awrence Livermore Laboratory, Livermore, 1978.43. Scbreider, Y. A., Ed.: Metod statisticheskih ispytani <strong>Monte</strong> <strong>Carlo</strong> (in Russian) Fizmatgiz, Moscow, 1961,— German translation: Die <strong>Monte</strong> <strong>Carlo</strong> Methode und ihre Verwirklichung mit elektronischen Digitalrechnern,B.b. Teubner Verlagsgesellschaft. Leipzig, 1964, — English translation: The <strong>Monte</strong> <strong>Carlo</strong> Method,Pergamon Press, New York, 1966.44. Spanier. J. <strong>and</strong> Gelbard, E. M., <strong>Monte</strong> <strong>Carlo</strong> Principles <strong>and</strong> <strong>Neutron</strong> <strong>Transport</strong> Problems, Addison-Wesley, Reading, 1969.45. Watt, B. E., Energy spectrum of neutrons from thermal fission of U 235 , Phys. Rev., 87, 1037, 1952.46. Weinberg, A. M. <strong>and</strong> Wigner, E. P., The Physical Theory of <strong>Neutron</strong> Chain Reactors. University ofChicago Press. Chicago, 1958.47. Williams. M. M. R., The Slowing Down <strong>and</strong> Thermalisation of <strong>Neutron</strong>s, North-Holl<strong>and</strong>, Amsterdam,1966.48. Woodcock, E. R., Murphy, T., I lemmings, P. J., <strong>and</strong> Longworth, S. ('.. Techniques Used in the GEMCode for <strong>Monte</strong> <strong>Carlo</strong> <strong>Neutron</strong>ics Calculations in Reactors <strong>and</strong> Other Systems of Complex Geometry, inProc. on the Conf. Applications of Computing <strong>Methods</strong> to Reactor Problems. ANL-7050 Report. ArgonneNational Laoratory, Argonne, 1965, p557.
81Chapter 4COLLISION DENSITY AND IMPORTANCE EQUATIONS ANDTHEIM SOLUTION BY MONTE CARLOHaving reviewd the straightforward, step-by-step simulation of the physical processes,now the <strong>Monte</strong> <strong>Carlo</strong> solution of the neutron <strong>and</strong> photon particle transport is approached ina basically different way: deterministic equations are set up for the expected values of severalimportant physical quantities, <strong>and</strong> these integral equations are solved by <strong>Monte</strong> <strong>Carlo</strong>.Many different techniques can be applied even for the computation of simple onedimensionalintegrals <strong>and</strong> a great variety of efficient refined methods are available forevaluating integral equation systems. These methods are introduced via mathematical manipulationof the formulae — quite independently from the physical phenomenon underlyingthem.There will still be cases where the actual processes resemble the steps of the directsimulation, however a physically plausible interpretation is not always possible.In the first Chapter, integration by <strong>Monte</strong> <strong>Carlo</strong> is discussed in the depth needed forfurther underst<strong>and</strong>ing. Chapter 4.II. summarizes the most common variance reduction techniquesapplied in <strong>Monte</strong> <strong>Carlo</strong> integration. In Chapter 4.111., <strong>Monte</strong> <strong>Carlo</strong> solution of secondorder Fredbolm-type equations is discussed. The subsequent Chapters deal with the solutionof transport equations.I. MONTE CARLO CALCULATION OF INTEGRALSFor the sake of curiosity let us first note that all problems solved by <strong>Monte</strong> <strong>Carlo</strong> areessentially equivalent to integrations. 12 In fact, in any <strong>Monte</strong> <strong>Carlo</strong> calculation a set. ofnumbers (denoted here by a vector F) is determined on the basis of a certain set of selectedr<strong>and</strong>om numbers p,, p 2,..,p N. In other words the result of a <strong>Monte</strong> <strong>Carlo</strong> simulation can beexpressed in terms of a vector valued functionF(Pi-P 2,•••-PN)where N may be of the order of several thous<strong>and</strong>s. Let us now note that the function aboveis an unbiased estimator of the N-dimensional integralI = j dx,I dx 2...^ dx„F(x,,X 2,...,X 11)Naturally, the idea of estimating an integral over many-dimensional space by evaluating thefunction at one r<strong>and</strong>om point in the space is far-fetched.Anyhow, after this curious introduction let us turn to practical integration methods.A, TWO BASIC WAYS FOM SOLVING ONE DIMENSIONAL INTEGRALSThe first basic method is the application of the rejection method.Theorem 4.1. — Let us define the following integral:dxf(x) (4.1)whereO =s m S= f(x) =£ M for a =£ x
82 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> CalculationsThen, if X 1-S are sampled r<strong>and</strong>omly from [a,b] <strong>and</strong> y rs from [m,M], then the integral canbe estimated byI = (M - m)(b - a) ^Nif N is the number of experiments <strong>and</strong> n is the number of cases where the conditionv, « fix,)is fulfilled.The proof of this theorem is straightforward from the geometrical interpretation of theintegrals, the rigorous proof is analogous to that of Theorem 2.4.Let us note that the theorem concerns only nonnegative functions. Now in case theintegral of a function assuming also negative values is to be estimated the function is to beformally written in the formf(x) = I +(X) - f (X)wheref +(x) = fix), if f(x) > 0--- 0, otherwise<strong>and</strong>Mx) = -f(x), if f(x) < 0= 0, otherwiseNow Theorem 4,1 applies to both 12. (x) <strong>and</strong> f._(x) <strong>and</strong> the difference of the two estimatesdetermines the estimate of the original function. A similar trick can also be applied in allthe integration methods below, although, it is only of theoretical interest in most applicationsin this book since particle transport calculations almost exclusively assume positive valuedintegr<strong>and</strong>s.The second method is based on the calculation of averages of r<strong>and</strong>omly selected valuesof the integr<strong>and</strong>.Theorem 4.2. — Let us rewrite Equation (4.1) in the formdxf(x) - JdXh(X) 1P(X) (4.2)where cp(x) 3 0, fdxcp(x) = 1, i.e., cp(x) is a PDF. If N independent X 1samples are selectedfrom tp(x), then the average of the h(x,) weights is an unbiased estimator of I:I =NS "(X 1) (4.3)
83Proof. The expected value of I of Equation (4.3) is(I) = ~ S IdX 1I 1(X 1)CP(X 1) = ^ 2 |d X if( X i) = IN J N .... i JB. GENERALIZATION TO MULTIDIMENSIONAL CASESGeneralization of the method above to multi-dimensional integrals is obvious It isdemonstrated through the example of the second basic method — the one which is preferredin practical applications. Let the integral to be estimated have the following form:dxf(x) (4,4)where x is the symbol of a point in an n-dimensional phase space, <strong>and</strong> T is the domainintegration. Let us rewrite Equation (4.4) similarly to (4.2):^dXh(X)(P(X) (4.5)wherecp(x) 3= 0, JDX
84 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> CalculationsFIGURE 4.1.More complicated are the integrals where the limits are interdependent. Let us illustratethe problem with a very simple example 12 :I=J I dxdyf(x,y)Jx=OJy = OIt is tempting to solve this problem in the following way:1. Choose x from the uniform distribution over (0,1) : x = pi,2. Choose y from the uniform distribution over (0,x) : y = xp 2.Though this procedure would yield points only in the allowed region, it would give thesame number of points for each x values. This gives a much higher density of points aboutx = 0 than about x = 1, i.e., a wrong solution.A simple graphical representation (Figure 4.1) may help to underst<strong>and</strong> the problem:There are several ways to find a correct solution. The first — <strong>and</strong> theoretically veryeasy solution — is:1. The probability p*(x D) dx Dthat x lies in dx Dabout X 0is:p*(x D)dx„ = y(x 0)dx 0= x 0dx 0thus the actual values of x are to be selected from the PDF:P*(x) .p(x) = -p= 2xJ 0dxp*(x)By application of the inverse distribution method (viz. Equation (2.2))p = P(x) = J^dx2x = x 2x = Vp
SSor — from Theorem 2.5 —x = max(p,,p 2)2. Now y can be selected from the uniform distribution over (0,x):>' = xp 5The rejection method can also be used:1. Choose both x <strong>and</strong> y from the uniform distribution over (0,1); x = p,, y =-- p,2. If y > x reject the point.The correctness of this procedure is obvious from the sketch in Figure 4.1» however themethod has the disadvantage of using only half of the points generated (the efficiency is0.5).The best way for this "triangle sampling" is the following:1. Select two independent r<strong>and</strong>om numbers: p, <strong>and</strong> p 22. Set x = max(p,, p 2)y = min(p,,p,)Graphically, this is equivalent to choosing points r<strong>and</strong>omly over the square, then foldingthe square about the diagonal so that all points selected fall into the lower triangle.In complex multi-dimensional integrals with interdependent boundaries the selectionfrom the F domain is executed most frequently by the rejection method, or by a combinationof the rejection with special tricks as illustrated by the folding above. The whole selectionquestion is similar to the problem of the two <strong>and</strong> three dimensional source coordinateselections discussed in Section 3.1.C.Anyhow, mainly due to the applicability of the rejection technique, one of the fundamentaladvantages of the <strong>Monte</strong> <strong>Carlo</strong> method in solving multidimensional problems is thatit can h<strong>and</strong>le relatively easily problems in which the limits of integration (or, more, generally,the boundaries of zones) are awkward <strong>and</strong> interdependent.The other advantage, the fast convergence, is discussed in the next Section.D. CONVERGENCE OF NUMERICAL INTEGRATION METHODSThe simplest non-<strong>Monte</strong> <strong>Carlo</strong> method for one dimensional numerical integration is thetrapezoidal rule, which consists of dividing the required interval into n subintervals <strong>and</strong>approximating the integral over each subinterval by the area of the trapezoid under the curve.If we think of the function to be integrated as expressed by a Taylor's series expansionabout each of the n points separating the subintervals, then the constant terms <strong>and</strong> the firstderivative terms will be integrated by the trapezoid rule. The largest error will be contributedby the omission of the second derivative (constant curvature) terms. If the function isevaluated at n equally spaced points, the error will be proportional to 1/n 2for large n-s.If we make another estimate based on 2n points, then by a linear combination of the. n<strong>and</strong> 2n estimates 12 the 1/n 2 error term can be dropped out <strong>and</strong> this "second-order rule'method will converge as 1/n 4 . This method can be further extended by higher numbers ofpoints.The <strong>Monte</strong> <strong>Carlo</strong> estimate — as we have seen in Chapter 3.11! -- using st<strong>and</strong>ard r<strong>and</strong>omnumbers converges always as n " " 2 .In the following table the dependence of errors on the number of points for differentmethods applied to one-dimensional integral are compared.<strong>Monte</strong> <strong>Carlo</strong>Trapezoidal rule"Second order rule"S ~ nS ~ nS ~ n
86 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> CalculationsAt first glance the <strong>Monte</strong> <strong>Carlo</strong> method looks pretty bad here. However, if we modifythe above formulae for integration over K dimensions, the <strong>Monte</strong> <strong>Carlo</strong> expression remainsunchanged, whereas for the others the exponent must be divided by K. This means that<strong>Monte</strong> <strong>Carlo</strong> converges faster than the trapezoidal rule in five or more dimensions. Whenwe go above five dimensions the non-<strong>Monte</strong> <strong>Carlo</strong> methods begin to break down completelybecause of the unreasonably large number of points required. For example 10 points in eachof 5 dimensions already means IQ 5points in phase space. A calculation for so-many pointsis not only very time consuming, but also the set-up of the points in a domain with complexboundaries requires enormous efforts.The increase of the sample size is one of the methods to decrease thes/Vnerror, the other way is to search for methods reducing the variance s. Such methods aredescribed in the next Chapter.II. ELEMENTARY VARIANCE-REDUCING TECHNIQUESA. MEAN AND VARIANCE IN STRAIGHTFORWARD SAMPLINGLet us return to the general problem of evaluating the integral (4.5)I = dxh(x) cp(x) (4.7)where cp(x) is a PDF. If N samples (x,, X 2, . . . x N) are selected from cp(x), an estimate ofI is defined by the mean of h:1 -h - - y Ms,)0N if,(4.8)This mean is an unbiased estimate of the integral, i.e., its expected value is equal to I:
The reader should refer here to the elementary transformations described in Section3,III.B, which lead to other formulation of the empirical variance:NN N 2 112 Ix 1) - fr (4.(The N/(N -1) factor tends to unity at large N-s <strong>and</strong> is frequently omitted.)B. IMPORTANCE SAMPLINGLet us now modify the straightforward procedure described in Theorem 4.2 in diefollowing way:1. Tranform Equation (4.7) intoif h(x)cp(x)I = dx — ^ r -
88 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> CalculationsTo give guidance for the users in the selection of promising importance functions, letus examine the expected value of the empirical variance in Equation (4,14). For sufficientlylarge N1 | h ^ ^ ) _ X, 1 h(x) cp(x)
89Applications of multi-variable importance sampling to particle transport problems willbe demonstrated in Chapter 5.C. SYSTEMATIC SAMPLINGIn systematic sampling the total domain of integration I' is divided into J sub-domainsFj, so thatJu r, =rIf n T 1= 0 if i * j ) (4.1?)The probability density of x for a given F 1is:tp/x) =cp(x)/pj, if x E r,0, otherwisewherep, = d(x)cp(x) (4.18)Jr 1Now, if it has been decided in advance that altogether N samples are to be selected <strong>and</strong>the Pj-s defined by (4.18) are known thenNj = PyNsamples will be picked up from each subdomain. The estimate of the integral (4.7) is:J j Jj J Jh, = 2 Pj rr 2 Mx 1,/) = ~ 2 2 «*j> (4.19)Nij = 1 INj i = i IN j = i i = iwhere X 1 +is the i-th sample from the j-th region.Proof.Theorem 4.5 — h sis an unbiased estimate of I. = E ft (dxh(x)(P 1(X) = JdXh(X)(P(X) -= IThere may be cases (especially in one dimension <strong>and</strong> for relatively simple
90 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> CalculationsThenN, =NJ<strong>and</strong> the estimate (4.19) becomes:E h(x„)(4.20)In the actual realization of (4.20) there is a possibility to use the same r<strong>and</strong>om numbersequence (i = 1,2, . . . ,N/J) for the selection of the x Lj-s for j = 1,2, . . . ,J, howeverthis method — in spite of the fact that it needs fewer r<strong>and</strong>om numbers — results in generallyworse efficiency than the use of N independent samples.Systematic sampling always reduces the variance from that obtained by the straightforwardmethod. The variance is decreased by J 2in the equal probability domain division, inthe general case the estimation of the gain is more complicated. An exhaustive analysis ofthe method was given by Kahn. 14Just for comparison, the domain can be imagined to be sliced into sub-domains also inthe straightforward sampling, even if this slicing is actually not used. From this point ofview, the difference between the estimates in Equations (4.8) <strong>and</strong> (4.19) is that the precomputedNj values in case of systematic sampling are replaced by r<strong>and</strong>omly selected values ifthe straightforward sampling is used.The use of systematic sampling is always recommended if it does not need significantextra work.I). QUOTA SAMPLINGThe basic concept of quota sampling — or stratified sampling as it is alternatively called— is to mix the ideas of the importance <strong>and</strong> systematic samplings. The Y domain is againcut into subdomains, however the number of samples to be taken from each subdomain isselected such as to obtain a minimum — or, in practice, near-minimum — variance. Regionsof large variances should be sampled more frequently.The rules of slicing the F domain are the same as given by Equations (4.17) <strong>and</strong> (4.18)however now the N-s are to be selected as to obtain a minimum variance.In quota sampling the first equality of Equation (4.19) is still applicable <strong>and</strong> the estimateis now:(4.21)ifthe contribution from the j-th subdomain.The unbiasedness of the estimator in Equation (4.21) can be proved exactly in the samemanner as applied in the proof of Theorem 4.5.
91Our task is now to give some guidance for the selection of the N-s. As it is shown inReference 20 N 1should be selected to satisfy the equalityN 1= N (4,22)SPjSjwhere S 1is the variance in the T 1sub-domain.Since the S 1variances are generally not known in advance, an iterative method can beapplied: First, calculations are made by best-guess estimates of N rs, (say Nf) <strong>and</strong> thecorresponding empirical variances are calculated from (4.12) as:* -wh [SI I -(4.22).The s* values are now the bases for selecting a better set of N rs according to EquationE. USE OF EXPECTED VALUESAny part of the integration that can be determined analytically should be carried out inthat way. In the extreme, if the whole integral is executable by analytical solution, there isno need for <strong>Monte</strong> <strong>Carlo</strong> simulation.As an illustration, consider the following simple example: let us assume that there is afunction g(x) "near" h(x), for which the integral over F is knownTheorem 4.6 — The integral (4.7) can be estimated byK = C + -J- I [h(x.) - g(x,)] (4.23)whereC =dxg(x) 9(x)<strong>and</strong> the x rs are selected from
92 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> CalculationsThe separation <strong>and</strong> analytical integration of a part of the function to be integrated isonly one way of using expected values. The reader has already met similar examples: theuse of the statistical weight discussed in Section 3.II.C is a replacement of absorbtion byits probability, <strong>and</strong> Section 3.II.D. was fully devoted to the use of expected values in scoringduring r<strong>and</strong>om walk simulations.F. CORRELATED SAMPLINGCorrelated sampling is a very effective variance reducing technique when one wants tocalculate the effect of a small perturbation in the system analyzed, or to study several similarproblems, or — in our present approach — to compute the difference between two integrals.In such cases the statistical uncertainties of two (or more) independent straightforward <strong>Monte</strong><strong>Carlo</strong> calculations may happen to be in the same range as the small difference to be calculated.In other words, the result may be lost in the r<strong>and</strong>om noise. However, if the simulations usethe same sequence of r<strong>and</strong>om numbers, the difference in the results will more clearly exhibitthe real difference between the problems.As an illustration of this technique, let us follow the example of McGrath <strong>and</strong> Irving. 20The task is the calculation of the difference between two integrals:AI = I, - I 2where1 1= JdXh 1(X)Cp 1(X)<strong>and</strong>1 2== Jdxh 2(x) (p 2(x)In a straightforward simulation twice N independent samples X 11, x, 2, . . . ,x, N; X 2 1,x 22, . . . ,x 2Nare picked up from the PDFs (p, <strong>and</strong>
93If the estimations of h, <strong>and</strong> h 2are positively correlated, thencovin,,h 2) > 0<strong>and</strong> the resultant variance is less than that resulting from the use of two in.. •. «forward samplings. Application of correlated sampling to particle trans;» >> 1detailed in Chapter 6.1.G. FURTHER METHODSThere are many more methods to decrease the variance »i \ ,N «- C , i >,listed here. Several techniques with special importance in netfamiliar to the readers of Chapter 3, other procedures will h ' , < tof the book.For a more complete summary one of the basic references' 4 ' 2 ' 1 ' 2 " should be consultedIII. SOLUTION OF FREDHOLM-TYPE INTEGRAL EQUATIONSA. INTRODUCTIONIn this Chapter, the simple integral solutions discussed above will bstep to arrive to Fredholm-type integral equations of the second kind. •of the particle transport equations.Let us denote the PDF in Equation (4.5) by tp, <strong>and</strong> assume ,> , ,. i «V'»»equation, i.e., let us write• 'I = jdxh(x)(p,(x) (4..24]Furthermore let us assume the cp, is expressed asalso a PDF.Let us introduce the conditional probability k as:, , K(x',x)uxx') = -y^w(x )wherew(x') == JdxK(x',x)process:Theorem 4.7 — The integral I of Equation (4.24) can be estimated1. Choose N values of x[ from
94 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> CalculationsProof. The expected value of 1 is:J.I-dxh(x) IP 1(X) =I•B. FREDHOLM TYPE INTEGRAL EQUATIONS, TUNC TIONALS TO BEDETERMINEDThe second-kind Fredholm-type integral equations are defined by:(4.26)where (p(x) is the multidimensional function to be determined, Q(x) is called the source termof the equation <strong>and</strong> K(x',x) is the non-negative integral kernel.If afunctional of the form of a weighted integral of
95whereI 1= JdXf(X)(Pj(X) (4.28)way:Theorem 4.8 — The integral I of Equation (4.27) can be estimated in the foil1. Set j = 0, select the initial coordinate x u, from the PDFt,q(x) =Q(x)W,,owherew M 1= Jdx Q(x)2. Select the (j + I)-St coordinate x M + 1from the conditional probabilityk(xx ld)wi,j( x ij)wherejdxK(x id;x)is called the (j + I)-St weight factor.3. Set j = j + 1 <strong>and</strong> return to step 2.4. After N repetition of the process the quantityI 4 I W 1Jf(X 1 0)is an unbiased estimate of Ij of Equation (4.28), if the Wy weight is defined as:w,j = ri W 1,,t -- 0A proof can be otained by recursive application of the proof of Theorem 4.7.The total functional I of Equation (4.27) is trivially the sum of the contributions of al!terms in the Neumann series:J = ODuring the execution of the procedure outlined in Theorem 4.8 steps 2 <strong>and</strong> 3 form aninfinite cycle which is to be stopped for any practical application by reasonable criteria.Cut-off criteria can be assigned to any accuracies if the terms I 1are monotonously decreasingfor increasing j-s.Special cut-off criteria will be given in the next Chapter — for the transport processes.
96 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> CalculationsI). KERNEL DISTORTION, IMPORTANCE SAMPLINGIn Section A the K(x',x) kernel was replaced by the conditional probability k(x|x') <strong>and</strong>the statistical weight w(x') in the actual sampling, so as to work with a normalized PDF.The principle can be generalized for the sake of variance reduction. Let us define anotherkernel K(x',x) > 0 <strong>and</strong> assume that it is normalized:dxK(x',x) = 1that is the conditional probability of x is:k(x|x') = K(x',x)Let the weight now be(, . K(x',x)w(x ,X) =K(x',x)process:Theorem 4.9 — The integral I of Equation (4.24) can be estimated by the following1. Choose N values of \[ from tp M(x')2. Choose subsequent values of x,-s from the conditional PDF k(xjx|)3. Compute the averageI = -J- 2w( X;,x,)h(x,)Proof. The expected value of I is:(D = JJdx'dxw(x',x)h(x)k(x|x')( P]_ 1(x')= IdXh(X) Idx' K(x'.x)^ i(x')J J K(x ,x)= fdxh(x) CP^ 1(X) = ILet us now apply the kernel distortion to the Fredholm type of integral equationof the second kind given in Equation (4.26), <strong>and</strong> replace again K(x'.x) by K(x',x). LetK(x',x) be again a normalized p.d.f., thus the conditional probability of x is againk(x|x') - K(x',x).Theorem 4.10 — The integral I of Equation (4.27) can be estimated in the followingway:1. Set j = 0, select initial coordinate x ( 0from the PDF:, , QWq(x) =Win
97whereW 1 0= |dxQ(x)2. Select the (j + I)-St coordinate X 1 j t, from the conditional probabilityk(xjx,j)<strong>and</strong> compute the (j + I)-St weight factor3. Set j = j + 1 <strong>and</strong> return to step 2.KO^x 1 J + 1)U7 = - —Ktx^x,.,, ,)4. After N repetitions of the process the quantityis an unbiased estimate of L of Equation (4.28) if the W nweight is defined as... ,', ' K(X 1,; Xf 11)w n= ii w,t= w i0nA proof cm be obtained again by recursive application of the proof of Theorem 4.9.nTheorem 4.9 demonstrates that unbiased estimates of the functional (4.27) can be obtainedby proper weighting even if the kernel of the Fredholm equation (4.26) is distortedOne can raise, however, the question: what is the benefit of deviating from the straightforwardsampling? The answer is clear, the implementation of those, <strong>and</strong> only those distortions areto be considered proper which lead to variance reduction.Another approach to variance reduction, leading to similar results, is importance sampling.Here, the density function cp(x) given in Equation (4.26) is "multiplied by a chosenfunction V(x), which measures the importance of an event at x, on the quite reasonableground that important regions . . . should get intensified sampling attention." 5Let us now multiply each term in Equation (4.26) by V(x) > 0, with the result(p(x)V(x) - Q(X)V(X) + Jdx'K(x'.x) ^tPtV)V(X')functionThis equation is identical with Equation (4.26) if
98 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculations<strong>and</strong> the source term <strong>and</strong> the kernel are modified as follows:Q(x)Q(X)V(X)K(x',x)K(x',x)V(x)V(x')(4.30)There are two comments worth making in connection with Equation (4.30). First,importance sampling has lead to biasing of the kernel. Second, Equation (4.30) gives acertain kind of guidance for selecting the distorted kernel. The result is plausible: the K/Kratio is to be increased if the new point selected (x) lies in a more important region thanthe last point (x|), i.e., V(x) > V(x'); <strong>and</strong> vice versa.There is still one question to be answered: how can we estimate I if importance samplingis applied in the selection of the coordinates? Let us express
99kind Fredholm-type integral equations we can turn our attention to the problem investigaedthroughout this book, that is to neutral particle transport.A mathematical analysis of the migration of neutrons <strong>and</strong> photons can be started fromvarious forms of the Boltzmann equation. In formal courses, the differential equation forthe flux is considered most commonly. In our treatment we shall appraoch the problem bystudyingthe integral equations for the collision densities.In the introduction of the collision densities <strong>and</strong> in the derivation of the integral equationsconnecting them, basically the approach used by Irving 11is followed. First the basic quantifies<strong>and</strong> functions are introduced, next the equations connecting these quantities are established.<strong>Monte</strong> <strong>Carlo</strong> solution of the resulting equations is treated in details in the third section ofthis Chapter.A. DEFINITION OF THE COLLISION DENSITIESLet us introduce a pair of collision density functions, describing the parameters of (heparticles going into or coming out of a collision, respectively.Let us denote byX(r,w,E)drdwdEthe expected number of particles coming out of a collision in a volume element dr about rwith an energy between E <strong>and</strong> E + dE <strong>and</strong> direction in the solid angle dto about ta. Thefunction x will be called simply as outcoming collision density though it is not a densityfunction by the definition used in probability theory, i.e., its integral over the whole phasespaceis not unity.Sometimes, for brevity, the (r,w,E) coordinates of the six-dimensional* phase-spacewill be symbolized by the single letter P <strong>and</strong> thus x(r,
100 <strong>Monte</strong> <strong>Carlo</strong> Panicle <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> CalculationsThe function tj>- is called simply an ingoing collision density. It can also be exp<strong>and</strong>ed intoNeumann series as*KP) = S4',(P)ijj is the ingoing collision density of the particles just entering the (i + I)-St collision.Here, the physical meaning of the zeroth term is not so trivial, it is the density of the particlesentering the first interaction. Its relation to the physical source will be discussed in SectionD.B. DEFINITION OF THE TRANSITION AND COLLISION KERNELSTwo functions, which will be the kernels connecting the two collision densities in theintegral equations to be introduced in the next Section, are defined here to describe the twobasic processes govering the r<strong>and</strong>om walk of the particles.1. The Transition KernelWhen a particle just has left a collision, until its next interaction its energy <strong>and</strong> directioncoordinates remain unchanged.Let us denote byT(r'~~>rjw,E)drthe probability thai a particle leaving a collision at r' will enter its next collision in dr aboutr.The general three-dimensional form of T is:si« rT(r'—»r|
dR = dsdr_ - R 2 ciRci J r i. s •
102 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> CalculationsHereafter, the symbol E = (co,E) is used since it simplifies the formalae as the energy<strong>and</strong> the directions of the scattered particles change at the same events, <strong>and</strong> in many casesnot independently of each other. (The same unification of the energy <strong>and</strong> direction coordinateswas achievable by the use of the velocity vector v.)The second term in the RHS of Equation (4.34) summarizes the results of all possiblecollisions from all possible pre-collision coordinates (E' <strong>and</strong> to').<strong>Particle</strong>s emerging (either by emission or by collision) at r' can enter a next interactionin the neighborhood of r. if they are oriented in the proper way <strong>and</strong> reach that region, i.e.,with the definition of the collision densities <strong>and</strong> the transition kernel the ingoing collisiondensity is expressed asdj(r,E) = |dr'x(r',E)T(r'->r|E) (4.35)The pair of Equations (4.34) <strong>and</strong> (4.35) fully describes the collision densities. Thereare two points worth noting here.1. Equations (4.34) <strong>and</strong> (4.35) are deterministic equations for expected values of stochasticvariables, <strong>and</strong> thus — at least theoretically — they can be solved by deterministicmethods. Thus when discussing <strong>Monte</strong> <strong>Carlo</strong> solutions of these equations wemake — in a certain sense — a double maneuver: first deterministic equations areestablished for a stochastic process <strong>and</strong> then a stochastic model is built up to solvethe deterministic equations. In the simplest cases the stochastic model leads directlyback to the simulation of the basic stochastic process, whereas in more refined techniques,the physical analogue does not exist anymore, the original physical <strong>and</strong> finalartificial stochastic models are connected by mathematical manipulations only.2. By substituting Equation (4.35) into Equation (4.34) an integral equation solely forX(P) is obtained:X(r,E) = Q(r,E) + dr'dE'x(r',E')T(r'^r|E')C(E'-^E|r) (4.36)Similarly, if one substitutes Equation (4.34) into Equation (4.36) the following equationfor the ingoing density is obtained:ildr.E) = Qjr.E) + [JdE' dr' iliir' .E') C( E'->E|r' )T( r'-»r|E) (4.37)where the first (or first-flight) collision source Qis defined by:Q c(r,E) = |dr'Q(r'.E)T(r'-r|E) (4.38)Q.tr.E) is a physically correct description of the density of the particles entering their firstcollision at (r,E).The whole <strong>Monte</strong> <strong>Carlo</strong> treatment of particle transport can be carried out in terms ofonly one of the densities I|J or x- It is reasonable to express the equations in terms of theingoing collision density t|/ which is directly connected to the particle flux, a fundamentalquantity in particle transport theory. In many <strong>Monte</strong> <strong>Carlo</strong> descriptions indeed this singlequantity is used, (<strong>and</strong> is referred to briefly as collision density) nevertheless for the momentwe keep both densities in the derivation since parallel use of x <strong>and</strong> ^t offers more opportunity
!©3for simple plausible explanations -— especially in the derivation of the value of equationsin Chapter 4.VI.Equation (4.37) can be further simplified by using the general phase-space coordinatesymbol P <strong>and</strong> by introducing the combined transport kernel (K)MP) = Q C(P) + JdP'i|>(P')K(P',P)whereK(P',P) = K(r',E'; r,E) =C(E'--E|r')T(r'--*r|E)D. THE THEORY OF THE STEP-BY-STEP SOLUTION OF THE COLLISIONDENSITY EQUATIONSHere, the <strong>Monte</strong> <strong>Carlo</strong> solution of the collision density equations introduced in. theprevious Section is outlined on the basis of the Neumann series expansion of the collisiondensity functions.The separate terms of the Neumann series expansions can be recursively generated withthe aid of Equations (4.34) <strong>and</strong> (4.35). The method is basically the same as described inconnection with the solution of a general Fredholm-type integral equation, however here acoupled integral equation system is considered. The corresponding recurrence is given bythe following equations:X„(r,E) = Q(r,E)(4.3¾i(r,E) = [dr' Xo(r',E)T(r'-^riE) (4,40)for the zeroth terms <strong>and</strong>X l +,(r,E) = jdE'tii,(r,E')C(E'^E|r) (4.41)vl; lfl(r,E) = Jdr' Xi+1(r'.E)T(r'-»r|E) (4.42)for i + 1 = 1,2, . . . ,00.Equations (4.39) through (4.42) have an obvious interpretation.X oin Equation (4.33)is the density of source particles at (r,E), i.e., the density of the particles corning out oftheir "zeroth collision".Similarly, t|t 0in Equation (4.30) defines the number of particles enteringcollision in the neighborhood of Ir,Ei. X;+i in Equation (4.41) is expressed as the '
104 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationswhere q x< 1, q l()< 1. (The possiblity of the use of the same q values for all 1-s is aconsequence of the physical fact that the process is Markovian, i.e., the laws of transportare independent of the number of previous collisions.) Subcriticality means also that theNeumann series' for the collision densities are convergent.The <strong>Monte</strong> <strong>Carlo</strong> realization of the recurrence in Equations (4.39) through (4.42) isgiven in the following steps:1. Set i = 0. Select initial coordinates (r 0,E„) from Q(r,E). This gives a sample fromX 0(r 0,E l() in Equation (4.40).2. Select the next collision site r i +, fromT(SY-He 1) drThis will define a sample from (Jj-(IV, ,,E 1) in Equations (4.40) <strong>and</strong> (4.42).3. Select the post-collision coordinates in the (i + I)-St collision fromC(E,^E|r,+OdEwhich gives a sample from X 11i( r i +1,E 1 + 1) in Equation (4.41).4. Set 1 = i + 1 <strong>and</strong> return to Step 2.There are, however, two problems with the procedure given above:• Selection of new coordinates can be made only from probability density functions,i.e. from functions whose integrals over their whole range is unity, however thiscondition is not a priori fullfilled.• The cycle of Steps 2 through 4 above is infinite i.e., for practical applications aterminating criterion must be found.As it has already been seen at the heuristical level <strong>and</strong> will be demonstrated in SectionF. the two problems are not independent of each other.The next Sections are devoted to a discussion of these questions. But before turning tothis a last — <strong>and</strong> very important for the future (Chapter 5) — remark is to be made here.If one compares Equations (4.39), (4.40), <strong>and</strong> (4.38) then the equalityOJ 1•-E) = Wr,E) (4.43)is obtained, i.e., the first-flight collision source is just the zeroth term in the Neumann seriesof the ingoing density function. Hence, inserting Equation (4.43) into Equation (4.37) theresulting equation reads(Jj(P) = i(P) + JdP'Vj)(P') K(P',P) (4.44)<strong>and</strong> this form will be the starting equation in Chapter 5.1.E. NORMALIZATIONS OF THE TRANSITION AND COLLISION KERNELSIf one assumes that both the collision <strong>and</strong> the transition kernels are normalized to unitythen the selection procedure mentioned in the previous Section needs no more modification.However, this is seldom the case. Let us now analyze the two kernels separately, since thephysical phenomena described by them are substantially different — though the mathematicalproblem is the same.
1051. The Transition Kernel •.If the whole geometricl space if filled with non-zero total cross-section material thenthe integral form of the transition kernel in Equation (4,32) becomesdrT(r'->r|E,w)dRT(R) = dR CT(R,E) exp a(R',E)dR'dR —dKexpVCT(R',E) dR'expCT(R',E) dR'or by introducing the optical distance:dRT(R) = 1 - exp[-t(OC)] (4.45)Now, since t(«») = 0 0 for a non-zero cross section extending to infinity, we find thatthe integral of T(R) is unity. However, if in any direction there exists a distance value R 0such that the cross-section of the medium R' > R 0is zero, then t(°°) = T(R c) < oo <strong>and</strong> inthis direction the integral of T(R) is less than unity. This problem can be eliminated by theintroduction of a hypothetical black absorber around the real system —just as we discussedat the level of heuristical interpretation (see also Section 5.I.C.). The other approach is thenormalization of the transition kernel.The normalization factor is triviallyT* = 1 exp[- T(OO)] (4.46)Equation (4.35) — <strong>and</strong> its successors: Equations (4.40) <strong>and</strong> (4.42) — can be reformulatedas:4>(r,E) x(r',E)T , T(r'->r|E) (4.47)where T7T* is now the probability density function that can be used for selecting a newcollision point within the region: 0 •& R ~; R„.The factor T* in Equation (4.47) is to be h<strong>and</strong>led as a weight — like the weight Introducedin Section III.A., this Chapter — <strong>and</strong> now the actually selected points will represent theiji(r,E) distribution only if all points are considered with their "scaled down" contributions,or, in other words, not only the r,, E 1coordinates but also the weight "coordinates" areessential characteristics of the collision density.When, during the successive selections in Steps 2 of Section D., this Chapter, suchweight corrections are applied many times, then at every step a new net weight correctingfactor has to be applied. IfT* denotes the normalization factor in the k-th flight of a particlethen the weight factor in the flight selection is:w = T*k.T1k
106 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculations<strong>and</strong> the resultant weight after K selections is:KW = II w, K,T(4,48)There may be geometries where the transition kerne) is normalized in one direction <strong>and</strong> isnot in another one. In such cases several w k xfactors in Equation (4.48) are unity.This weight treatment corresponds to the method introduced on a heuristical basis inSection 3.11. A. One has to realize that normalization of the transition kernel <strong>and</strong> introductionof the weight factor w k Timply that the particles are artificially kept inside that part of thesystem where the cross-section is non-zero.If one does not like to use such weights, one can play a Russian roulette after everytransition. If the weight of a survivor is fixed to W 0== 1 which trivially means that weightsneed not to be used at all. then the simulation is terminated with probability of (cf. Equations(3.18) <strong>and</strong> (4.46):p =exp|>T(=°V]which is just the probability that the particle can leave the region of interest, i.e., it is theleakage probability!It is worth recalling here that in the heuristic interpretation of the <strong>Monte</strong> <strong>Carlo</strong> techniquethe simulation of the leakage was plausible <strong>and</strong> its replacement by weight reduction seemedto be artificial. Now the case is just the opposite. If one approaches the problem from thepoints of view of solution of deterministic integral equations then the application of weightsis trivial <strong>and</strong> the simulation of the leakage has to be introduced artifically, by repeatedapplications of Russian roulette.2. The Collision KernelIn the numerator of the RHS of Equation (4.33) the expected number of particles comingout is summed over all possible interactions, whereas the denominator is the total crosssection.If there are only scatterings, i.e., interactions with one outcoming particle, C istrivially normalized to unity <strong>and</strong> therefore can be used as a probability density function forselecting the post-collision E <strong>and</strong> to coordinates:if Vy - 1 for all i-s <strong>and</strong> j-s, then1a(r,E')S S = 1.=1 j=lIn the real physical processes widely varying v-s occur, from v = 0 (for absorption) tov = 2 (for (n,2n) reactions, for the positron annihilation following a pair production eventin photon transport), or even to v > 2 (for fission events).Under these realistic conditions the collision kernel is not normalized to unity.The method described for the transition kernel is to be applied here again.The normalizing weight function is now triviallyw,
107<strong>and</strong> now Equation (4.34) — <strong>and</strong> its successor Equation (4.41) — can be reformulated asf . C(E'->Ejr)X(r,E) = Q(r,E) + J d E ' C * - ^ - ^i[.(r,E')In non-multiplying media w k C= C* is by definition the non-absorption probability <strong>and</strong>its use can be avoided by the application of a Russian roulette game which leads to thesimulation of absorption just in the same way as we saw in connection with the leakagesimulation in the previous subsection.In multiplying media if C* > 1, the particle's weight increases at the interaction, thus,if one wishes to fix the weight at W = 1, one has to "split" the particle into C* fragments,or if C* is not an integer into ent (C*) or ent (C*) + 1 fragments with ent (C*) + 1 — C*<strong>and</strong> C* — ent (C*) probabilities, respectively. (Splitting <strong>and</strong> Russian roulette will be treatedin more detail in Chapter 5.)The relation between the former heuristic <strong>and</strong> the present interpretations is again similarto that which we saw in the case of weight reduction: in the simulation of the physicalprocess the selection of more than one outcoming particles was trivial <strong>and</strong> its replacementby weight increase was artificial. Here, in the solution of the integral equation the introductionof weights was the straightforward method <strong>and</strong> artificial introduction of splitting leads usback to the analogue treatment of the physical events.When the particle's weight is modified at K successive collisions, the resultant weightis:W = fl w k, cK= 1If weight corrections are applied — or, in this presentation it is more consistent to saythat neither the transition nor the collision normalizing factors are renormalized by Russian,roulette or splitting — then after K transitions <strong>and</strong> collisions, the resultant weight is:KHi ^'K.C ° ^K,TK- 1since the transition <strong>and</strong> collision simulations are independent of each other.F. TERMINATION OF THE MONIE CARLO CYCLEThe first problem mentioned in Section D of this Chapter — the normalization of thekernels — is essentially solved now. The introduction of the weights or their replacementby Russian roulette or splitting automatically revealed two possiblities of termination:• The particle leaves the region with no return possiblity, or is absorbed, if no weightsare used;• <strong>Particle</strong>s can be killed by Russian roulette if their weight becomes too low.These two termination criteria are identical with those found in the heuristical interpretation Chapter 3, Sections LB. <strong>and</strong> I.C. There is a third criterion which is also the same asthe criterion which we earlier derived heuristically, viz. points representing terms of theNeumann series which make no contribution because the energy coordinate fell outside theregion of interest need not be computed.Feasibility of <strong>Monte</strong> <strong>Carlo</strong> games, i.e., conditions under which games do terminate witha probability one will be discussed in a rigorous way in Chapter 5.
108 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> CalculationsV. SCORINGA. GENERAL FORMULATION OF THE REACTION RATESIn Chapter 4.IV., methods for finding the r, E <strong>and</strong> w coordinates representing eitherthe ingoing or the outcoming densities were described. For practical purposes generally notthe collision densities themselves but a functional of one of them, a reaction rate or receptorresponse is to be determined. The general formulation of such functionals was given inEquation (4.27) <strong>and</strong> the recipe for a <strong>Monte</strong> <strong>Carlo</strong> estimate was described in Theorem 4.8.Theoretically. most reaction rates or responses can be derived either from the ingoingor the outcoming densities <strong>and</strong> it is up to the user to choose the most suitable approach.Accordingly, there are (wo basic definitions of any reaction rate R:<strong>and</strong>R = JdPf x(P) x(P) (4.49)R = JdPf +(P)Vi-(P) (4.50)where f x<strong>and</strong> f,j, are the pay-off functions related to the respective collision densities.The actual forms of f <strong>and</strong> f Alare determined by the physical quantity to be estimated.However, from the elementary requirement that the result R must be the same, whether itis derived from Equation (4.49) or Equation (4.50) a relation between the two pay-offfunctions can be derived in the following way:Let us substitute Equation (4.35) into Equation (4.50):R = JJ drdEf +(r,E) jdr'T(r'-~>r|E)X(r',E) (4.51)If now we interchange the order of integration over r <strong>and</strong> r'' <strong>and</strong> then the symbols r <strong>and</strong> r'themselves Equation (4.51) becomes:R = JJ dr dE X(r ,E) Jdr' T(r->r' JE) f +(r' ,E) (4.52)From comparison of Equations (4.52) <strong>and</strong> (4.49) the relationf x(r,E) - Jdr'T(r--r'!E»f.(r'.E) (4.53)is obtained.B. ESTIMATION OF MORE IHAN ONE RESPONSEThe same set of r<strong>and</strong>om walk simulations can be used for the estimation of many differentresponses or reactor rates.One may be interested in the flux integrals in two or more different regions, or incalculating differential quantities; e.g., in determining the fluxes for different energy intervals.In such cases a set of responses is to be determined by the use of a set of pay-offfunctions:R' -dPff (P) Uj(P)
109ordPf;(P) x(P)The crucial point here is that all estimations are based on the same re]collision densities <strong>and</strong> therefore the results R (1) will not be statistically md^ ^i ,Kother. This technique, therefore, can be regarded as a use of the correlated ' jm; li>>v i >in Section 4.II.F. When talking about the "result" of a <strong>Monte</strong> <strong>Carlo</strong> game it- a- c < oihtiis.ndata obtained from all collisions <strong>and</strong> the user provides a supplementaryquantity which interests him from the collision data.C. MONTE CARLO ESTIMATION OF THE RESPONSESThe <strong>Monte</strong> <strong>Carlo</strong> estimation of a functional of the function
110 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> CalculationsThe score from an entire history is the sum of the contributions:fx x= S r„ x(4.59)or2 (4-55)If the f x<strong>and</strong> C 4, pay-off functions are correctly chosen then the expected values of the(4.54) <strong>and</strong> (4.55) estimates must be the same:W - W = RAfter following j = 1,2, . . . ,n histories each scoring p, XJ<strong>and</strong>/or u.^ , the average ofthe scores is an unbiased estimator of R:ij=in j „ iD, EXAMPLES OF PAY-OFF FUNCTIONSAn extremely wide variety of physical quantities may be determined by <strong>Monte</strong> <strong>Carlo</strong>.In the following subsections several representative examples are shown <strong>and</strong> discussed.1. Collision Density <strong>and</strong> Reaction Rate IntegralsThe simplest question to raise in a <strong>Monte</strong> <strong>Carlo</strong> game is: how many collisions occured,i.e. how many particles entered collision, in a certain volume element (or domain) F? Theanswer is trivially:R = dr dE.).(r.E) = drdEh r(r)cj>(r,E) (4.56)rwhere h r(r) =1, if reT0, otherwiseThus from a comparison of Equations (4.50) <strong>and</strong> (4.56) the pay-off function is:f +(r,E) = h r(r)If only a part of the spectrum is of interest, e.g., one wishes to count the number ofcollisions which the particles enter with energy between E 1<strong>and</strong> E 2, then the correspondingpay-off function becomesf 1((r,E) =h r(r)h, ;(E)where h, =0,if E 1< E < E 2otherwise
IllSimilarly, solid angles of interest can be "cut out" by a window function h,„.The use of the counterpart pay-off function f can inform us about the number of particlesleaving collisions in a certain phase-space domain.The rate of a certain kind of interactions is also easily determinable. The number ofinteractions type i (having a cross section CT 1) is trivially:drdE -^—f i|i(r,E)The corresponding pay-off function is obvious from this formula.The flux integral can also be h<strong>and</strong>led as a reaction rate. From the elementary connectionbetween the ingoing density <strong>and</strong> the flux, the flux integrated over a domain T is expressedasR = | dr j dE
112 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> CalculationsFIGURE 4.3.After changing the order of integrations with respect to r <strong>and</strong> r'. <strong>and</strong> then these twosymbols themselves, one gets:R|JdrdEx(r,E)|dr'CT- | (r,E)T(r->r'jE)(4.59)Thus the pay-off function of the outcomingparticles isf x(r,E) = | rdr'a-'(r,E)T(r~-»r'!E)(4.60)Let us further analyse this pay-off. If the transport kernel is rewritten with the sametransformation as applied in the derivation of Equation (4.32), <strong>and</strong> the points where the pathcrosses the F domain are at R 1<strong>and</strong> R 2distances from r' (see Figure 4.3), then after substitutingEquation (4.32) into Equation (4.59) one gets:t;
113The expected track length is a sum of the contributions of the three (practically two,since the first one is zero) events:(4.63)Substituting Equations (4.61) <strong>and</strong> (4.62) into Equation (4.63) <strong>and</strong> integrating by parts onefinally obtains the expected track length as:Since the right h<strong>and</strong> sides of Equations (4.60) <strong>and</strong> (4.64) are equal to each other,f x(r,E) -{t)i.e., the pay-off function in Equation (4.59) is simply the formula describing the expectedpath length of a particle in the domain F if it enters a collision at r with direction <strong>and</strong> energy(to,E). (The derivation presented above is easily generalizable to paths crossing the T domainmore than once.) As in many cases already discussed these expected paths can be replacedby actual selected path lengths as if an "internal <strong>Monte</strong> <strong>Carlo</strong>" were played to estimate theexpected path — by a single experiment.In an actual game the flux integral estimate is nowR = ± 2 w,€, (4.65)where €, is either the expected or the actual track length of the i-th flight, if there arealtogether n flights of N history simulations. Naturally, the expected track length is computablejust after the simulation of the collision investigated, whereas for the calculation ofthe actual length the knowledge of the next collision site is a precondition for the determinationof the pay-off contribution.The expressions of the Equations (4.57) <strong>and</strong> (4.59), <strong>and</strong> their <strong>Monte</strong> <strong>Carlo</strong> estimatesgiven in Equations (4.58) <strong>and</strong> (4.65), respectively, are based on different collision densities.Nevertheless the estimates can be evaluated during a single run, from data observed fromthe same set of simulations. Therefore it is straightforward to assume that a linear combinationof the two unbiased estimators will also give unbiased results. The combination of thedifferent estimators will be discussed in Chapter 5.2. Transmission Through SlabsLet us re-examine the problem of Subsection 3.SI.D. 1. particles are entering a slab <strong>and</strong>the task is the calculation of the number of particles transmitted (see Figure 3.2).If the flux is denoted by
114 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationsdensity the flux at X is rewritten asdrdEo- '(r.E)4f(r,a>,E)S(x - X) (4.67)Now the density of the ingoing particles can be replaced by that of the outcoming onesfrom Equation (4.35) <strong>and</strong> Equation (4.67) becomes:dr' dE x(r' ,E) dr a -' (r ,E) T(r'-*r|E) h(% - X) (4.68)After substituting Equation (4.31) for the transition kernel <strong>and</strong> transforming it into its onedimensionalform (like in the derivation of Equation (4.32). Equation (4.68) becomes:R = dr'dEx(r',E) dxexpcr(r' + R'co,E)dR'8(x - X)dr'dEx(r',E)expcr(r' + R'w,E)dR'Changing r' to r (<strong>and</strong> consequently x' to x), the new form for the transmitted fluxbecomes:R drdo>x(i',E)exp - CT(E)i.e., the pay-off function is:f x(r,E) = exp - cr(E) X - xlIt is worth noting here that "collision density estimation": was first proposed by Bergerjust for the solution of these types of problems.If W 1, x 1, E 1, Oi xdenote the coordinates of a particle leaving a collision then the contributionfrom this collision is:f, = w,exp 'CT(E 1) (4.69)Equation (4.69) is identical with Equation (3.33) i.e., again the estimation via the expectedvalue — a little bit artificially introduced in Section 3.II.D, — is the straightforward wayhere. Counting of the actual crossing events can be derived artificially, by defining aninternal <strong>Monte</strong> <strong>Carlo</strong> game for a 0 or 1 estimation of the probability given by E/quation(4.69). The warnings about the estimation of extremely rare events (discussed in Section3.II.E.) are per se valid here, too.3. Flux-at-a-PointAs a last example of pay-off functions we consider a delicate problem of transport <strong>Monte</strong><strong>Carlo</strong> calculations: estimation of the flux-at-a given spatial point. A systematic investigationof this problem will be given in Chapter 6.
115In regions imbedded in non-zero cross-section materials the flux 1 P can be determinedby Equation (2.22); i.e., the flux at r is
116 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> CalculationsLet us now substitute Equation (4.34) into Equation (4.72), the reaction rate then reads:drdEa- '(r (1,E)T(r-*rjE) Q(r,E) + dE'C(E'->E|r)iKr.E') (4,75)The total flux in Equation (4.75) is a sum of two terms (R = R„ 4- R'). The first oneis the direct contribution from the uncollided source particles:R 0= j J drdEa" '(r„,E)T(r->rjE)Q(r,E) (4.76)The second term describes the contribution of the collided particles:R' = JJdrdEa-\r„3)TU-*rjE) |dE'C(E'-^Ejr)i|>(r,E') (4.77)By interchanging the order of integrations over E' <strong>and</strong> E, <strong>and</strong> then the two symbols themselves,Equation (4.77) becomes:R' = JJdrdEi]i(r,E)JdE'«r '(r 0,E')T(r-^r 0SE')C(E-^E'jr) (4. 78)In the majority of practical cases (in every case in photon transport) the post-scatteringenergy <strong>and</strong> the scattering angle are uniquely related. If so, the collision kernel can befactorized as followsC(E->E'jr) = C(Oi-W|E,r)S[E' - G(WW 1E)] (4.79)where the first factor describes the change in the direction of flight, whereas the relationE' = G(o>w',E)gives the new energy of a particle entering a collision with energy E <strong>and</strong> being scattered byan angle -9, cos-9 = too).Now by substituting the actual forms of the transition <strong>and</strong> collision kernels as given byEquations (4.31) <strong>and</strong> (4.79), respectively into (4.78), the contribution of the collided particlesto the flux isR' = drdEi|j(r,E) dw'dE'cxpcr(r',E)ds, r„ — r8 io — TL R
117Thus,C(
118 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculations2dr = -• R dR du>r„ _ R CoFIGURE 4.4.dr J ilF.cxpcr(r',E)ds6( < * ~ ^1V s4TTq(E)dr4TT Jv 5V 5dEq(E)expcr(r',E)dsq(E)(4.82)Thus if i= 1, 2, . . . ,n points with initial coordinates r i 0, <strong>and</strong> energy E 1 0are selectedthen R,, is estimated byR,.]n • 4 TTexprr(r',E irt)dsA much more exciting result can be achieved by several elementary modifications ofEquation (4.82).Let us first note that by the definition in Equation (4.31) the relationT(r-^r,iE,to)=T(r t,->rjH,- to)a(r D,E)
119r, readsR„ =V s4TT JR 2dR dEexp'Ocr(R')dR' q(E) (4.84)i:where R 2<strong>and</strong> R 1are the coordinates of the points where the line drawn from r to r„ enter;<strong>and</strong> leaves the source region, respectively.By elementary transformations <strong>and</strong> introducing R" - R - R', the final form of Equal:'.,.(4.84), i.e., the uncollided contribution iswhere the integrations from R 1<strong>and</strong> R 2<strong>and</strong> 0 to R follow the orientation of a line drawrfrom r Hto r.Thus, if i = 1, 2, . . . ,n points at r„ are selected with direction w, <strong>and</strong> energy E 1ihtaR is estimated by:Comparing Equations (4.85) <strong>and</strong> (4.64) one observes the peculiar result that the contributionof the source particles to the flux-at-a-point can be estimated by summing up theexpected length of paths in the source region. In this way the difficulties originating frossthe R factor are eliminated.Such an interchange of the source <strong>and</strong> target positions for the total reaction rate willbe achieved by the introduction of the adjoint <strong>Monte</strong> <strong>Carlo</strong> method —- described in Chapter4.VII.A systematic treatment flux-at-a-point estimation, based on the moment equations, wii:be given in Chapter 6.IV.VI. THREE SPECIAL PROBLEMSIn the previous Chapters of this Part the <strong>Monte</strong> <strong>Carlo</strong> treatment of particle trat.4/ *"•
120 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationsthe real transmission events was replaced by summing up the transmission probabilities,however, it was mentioned already there that this scoring technique helps only in a limitedregion <strong>and</strong> constitutes no solution for really deep penetrations,A more promising method is path stretching (or exponential biasing, or track lengthsbiasing). The basic idea is the modification of the transport kernel in such a way as to movethe particles in the preferred direction by artificially reducing the cross-section in the preferreddirection <strong>and</strong> increasing it in the opposite direction.It was mentioned in Section 4.III.D. that the distortion of the kernel(s) is one of thepossible variance reducing methods. The transition kernel was modified in Section 4.IV.E.where the introduction of the new T/T* kernel was a necessity for normalization. Here, anew kernel T is introduced for the purpose of variance reduction. It follows from Theorem4.10 that the estimates based on the game with the modified kernel are unbiased if thestatistical weights of the particles are multiplied by T/T after every selection, (Since we donot modify the collision kernel, K/K = 111.)In the following derivation the one-dimensional form of T given in Equation (4.32) asT(R) = o-(R,E) exp cr(R')dR' (4.86)is used.Let us now introduce the modified cross-section as tr as(t(R,E) = (1 - Plx)CT(R,E) (4.87)where fx is the cosine of the angle between the preferred direction <strong>and</strong> the direction of flightof the particle, <strong>and</strong> p is the biasing parameter.The principle of path stretching is clearly reflected in Equation (4.87). If p 3= 0 thecross-section d has the minimum value ofcr = (1 - p)ff if |x<strong>and</strong> the maximumCT = (1 + p)CT if UasTo keep the cross-section positive, we restrict the biasing parameter to p < 1.Let us now define the new transition kernel, through use of the modified cross-sectionT = CT(R,E) exp CT(R',E) dR' (4.88)The path length R is now to be selected from T which has the same form as T, exceptthat the cross-section is changed. From Equations (4.86) — (4.88) the statistical weightfactor isTTexp iip CT(R',E) dR'PJX(4.89)
123If (T is constant in the region, then the weight factor becomes:Texp( — |xp crR)f i - pp.In cases where the new transition kernel given in Equation (4.88) is not norn« usame approach is followed as in the case of the analog sampling. One can norkernel <strong>and</strong> apply another weight factor, or simulate leakage.The application of weight factors described in Equation (4.89 _ n 1
122 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculations1. Correlated SamplingAs it was already seen in Section 4.I.C. for integrals, correlated sampling can efficientlyreduce the error in differences.In particle transport the technique is applied in such a manner that the same set ofparticle tracks is used to analyse two problems simultaneously.Let us denote the kernel of the unperturbed problem by K(P',P) <strong>and</strong> that of the perturbedproblem by K(P',P). If the unperturbed problem is solved by an analog game, then fromthe point of view of the perturbed problem its kernel K is replaced by the "distorted" kernelK <strong>and</strong> thus a weight factor ofis to be applied whenever the coordinate P changes from P,from Theorem 4.10.)K(Pi-.-Pi),.onW -. (4.91)' K(P 1_ ,,P 1)lto P 1. (Equation (4.91) followsIf the pay-off function is f(P) then the contributions of the i-th event arer, = f(P,)<strong>and</strong>i, - f(P.) fl w,e= ifor the unperturbed <strong>and</strong> perturbed games, respectively. The difference in the scores for atotal history reads:Afx = fi - fx = i (NWf. Af(P 1After following j =1,2, . . . ,n histories each scoring (A(X) 1, the averagen j= iis an unbiased estimate of the reaction rate difference.Let us illustrate the derivation of the w ;factors defined in Equation (4.91) in a simpleexample. The task is the calculation of the effect of a small change in the density of amedium. The density p is changed to p + Ap. As was seen in Chapter 2.11., all macroscopiccross-sections are proportional to the density. Thus the collision kernel, being a ratio ofscattering to total cross-sections (see Equation [4.33)) does not change with the density.Consequently the transport kernel ratioK CT TK ~ CY"' Treduces to the ratio of the transition kernels.Using the one-dimensional form given in Equation (4.32) <strong>and</strong> assuming a homogeneousmedium:T(JV,,^) =o-exp(-o-R,)
123<strong>and</strong>TCr 1^1 ?r,) = (l + expPtf R 1= Ir 1-r,_,|.The weight factor, i.e., the ratio of the two kernels isW 1^ = ( I+ex P(--^cA)11 A p p then the computation of the weight factors can further be simplified toAp ApW 1= 1 + — - — o-RP Pif we exp<strong>and</strong> the exponential factor into Taylor series <strong>and</strong> neglect the second <strong>and</strong> higherorder terms of Ap.It is to be decided by the user which problem is considered unperturbed <strong>and</strong> which isperturbed. A derivation given in Section 6.I.D. suggests that the correlated game is to bea played analog in that system where the higher score is expected.Unbiased <strong>and</strong> finite results can be achieved only if none of the kernels vanishes in theregion of interest. Thus, for example the effect of complete voiding cannot be studied bycompletely correlated sampling. This problem is further studied in Section 6.I.E.Perturbation calculations can be carried out for studying parameter sensitivity by parallelcomputation of a set of weights referring to a set of kernels reflecting different degrees ofperturbation.2. Sensitivity Analysis by Differential <strong>Monte</strong> <strong>Carlo</strong>The sensitivity of a reaction rate to small (infinitesimal) changes in a parameter can bedetermined by differential <strong>Monte</strong> <strong>Carlo</strong>.Let us assume that i{;(x;a) is the solution of Equation (4.37) if a is the nominal valueof the parameter investigated. The perturbed density can be exp<strong>and</strong>ed into a Taylor series:
124 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> CalculationsIt has been shown 8 - 23that, estimation can be carried out by correlated tracking. Thismeans that the differential game can be played identical with the ordinary game, that is thegame with the nominal value of a is considered as the unperturbed game. For the calculationof the differential score (the perturbed game) weights are applied.Without proof (which is given in Section 6.II.B.) we cite here the result that the statisticalweight is additive in the differential game, that is after n-steps:W„Vwhere the i-th weight term is expressed as:1^K(TV ,,P,)W: = • (4.92)K(P 1. ,,P 1) da . v /Since K = CT the weight term is a sum of two terms:^ = - ^ + --1 (4.93)Kda Cdct TdaLet us illustrate the derivation of the weight terms again with the example where thesensitivity to the density is investigated, i.e., we replace the parameter a in Equations (4.92)<strong>and</strong> (4.93) by p.As we already discussed, the collision kernel is density independent:^dp= O<strong>and</strong> thus- i , K - = *L (4.94)Kdp TapFor calculating dT/dp let us consider that the macroscopic cross section is a product ofthe density <strong>and</strong> a density independent factor (cr):(T = per<strong>and</strong> thus the transport kernel can be written asT(Iv 1 1IV 1) = pd-exp(-pd-R) (4.95)From Equations (4.92), (4.94), <strong>and</strong> (4.95) the weight term is expressed as:w, = -(1 - crR.)Pif R: = r, - r,Up to now we have met only multiplicative weights. If the unperturbed game is nonanalogthen its multiplicative weight is to be multiplied by the additive weight in the estimation of
125the differential score. This pecularity of the differential game is further analysed in Chapter6.II.B.6.II.D.Estimation of higher order derivatives in the Taylor series of 4* is discussed in ChapterC. CRITICALlTY STUDIESThe criticality of a nuclear reactor is characterized by the effective multiplication factoik eff. It is defined as the ratio of source neutrons of subsequent generations. The reactor iscritical if k eff= 1, subcritical if k elT< i <strong>and</strong> supercritical if k. tT> 1.In a slightly loose terminology one can say that permanent operation of a reactor i>,achieved by keeping the multiplication factor at k„ n- I. Thus the extremely accuratecalculation of k eff<strong>and</strong> its variation due to system parameter changes is of crucial importance.From the definition given above the following equation can be writtenk en-X.generation. If the source distribution converges after a sufficient number of generations (wehave the eigenfunction), k cffcan be calculated from Equation (4.96).A good guess function can be found, for example, from approximate calculations.Less computer time is required by replacing the <strong>Monte</strong> <strong>Carlo</strong> calculation with a fissionmatrix iteration. 4The volume is divided into a number of contiguous cells <strong>and</strong> the matrix element a,,equals the number of first generation fission neutrons produced in cell i from one fissionneutron starting in cell j. The numerical iteration using the matrix with an initial source
126 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationsvector is very fast. Here, the a ymatrix elements can be computed in a one generation <strong>Monte</strong><strong>Carlo</strong> calculation.Let us now investigate the case where a small perturbation changes the fission neutroncollision density to \*, the fission kernel to K*(P',P) <strong>and</strong> the effective multiplication factorto k* -k* =dPdP'xT(P')K*(P',P)dPxT(P)If the differences are small we may approximate xt asXt(P) = X 1(P) + SXr(P)<strong>and</strong>JdP Xt(P) JdPxXP)1dP8 Xf(P)dP Xf(P)By these approximation the difference between the two multiplication factors is:8k eff= k! ff- k rff= j -1• F JJdPdP' Xl(P)[K*(P',P) -K 1(P',P)]JdPXf(P)ff / d P 8 X f ( P ) ff ]4 j JdPdP'8 Xf(P)K f(P',P) ~ - J JdPdP'[ X f(P) + 8 Xf(P)JK f(P',P) (4.97)JdPx 1(P)If the second <strong>and</strong> third terms of Equation (4.97) may be neglected (§x < x) then theequation reduced toJJdPdP' Xf(P',P) K f(P',P)8k ef= j (4.98)J dP Xf(P)where K.tP'.P) = Kt(P',P) - K(P',P).In this approximation 8k can be obtained in parallel with k cfeffin a correlated <strong>Monte</strong><strong>Carlo</strong>, since only the transport kernels of Equation (4.96) <strong>and</strong> (4.98) differ from each other.<strong>Methods</strong> to evaluate Equation (4.97) with all terms are reviewed by Bernnat.'Criticality is discussed in detail in Chapter 6.III.VIL ADJOINT MONTE CARLOInvestigation of the adjoint transport equations plays an important role in modern <strong>Monte</strong><strong>Carlo</strong> research. Equations adjoint to the transport (collision density) equations can be intra-
duced <strong>and</strong> discussed in various ways. Basically, one may consider the adjoint to eithintegral or the integro-differential transport equation. Some confusion may arise if onenot take into account that conversion from integro-differential to integral forms ancversion to adjoint do not commutate."The adjoint to an equation can be found purely mathematically. Instead, we appthe problem from a rather physical point of view. First, the value of the particle is d
128 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculations(4.36) <strong>and</strong> (4.37), respectively. Consequently, Equations (4.99) <strong>and</strong> (4.100) are adjoint s ofEquations (4.36) <strong>and</strong> (4.37). For this reason, <strong>Monte</strong> <strong>Carlo</strong> games played according toEquation (4.99) <strong>and</strong> (4.100) are generally called "adjoint calculations". (Later in this Sectionwe shall modify the value equations, however, the games built on the modified equationsstill retain the name of "adjoint calculations".)Based on the similarity between the collision density <strong>and</strong> value equations one can imaginethat the latter equations also describe collision densities — for some kind of imaginaryparticles: pseudo-particles. These curious particles start their histories from the receptor,since the source terms in Equations (4.99) <strong>and</strong> (4.100) are the pay-off functions of theoriginal physical problem.Moreover, the change from E' —> E to E —* E' in the collision kernel means that theenergies of the pseudo-particles increase at every collision (or rather pseudo-collision). Thereplacement of r' —» r in the transport kernel of the collision equations to r —» r' in thevalue equations can be interpreted to mean that the pseudo-particles fly in the directionopposite to their direction vector. (An analysis of the definitions of the collision <strong>and</strong> transportequations given in Equations (4.31) <strong>and</strong> (4.33), respectively, proves the validity of the abovestatements.)papers.Referring to the adjoint equations, the pseudo-particles are called adjunctions in severalThe connection between the two value functions is clear if we rearrange Equation (4.99)<strong>and</strong> (4.100) as*:i|>*(r,E) = f +(r,E) + |dE'C(E->E'|r) x*(r,E') (4.101)<strong>and</strong>X*(r.E) - Jdr'T(r-*r'!E)v|;*(r',E) (4.102)Nothing, in principle, prevents us from a solution of the value equations by a similarstep-by-step solution as described in Chapter 4.11. D. for the collision densities. However,a more attractive <strong>Monte</strong> <strong>Carlo</strong> treatment can be constructed if we modify the value functionsvia the following transformations:<strong>and</strong>iKr,E) = o-(r,E)i|;*(r,-E) (4.103)Xtr.E) - o-(r,E)x*(r,-E) (4.104)where E is the shorth<strong>and</strong> notation for ( —
129<strong>and</strong>X(r,E) = Jdr'T(r'-»r|E)«j>(r',E) (4.105)with the following further notation:f*(r,E) = a(r,E)4(r, -E) (4.106}<strong>and</strong>, fj(r,E)C(E-*-E'r) = C(E-»E'|r) • ,' (4.107)cr(i\E )The transition kernel in the modified value Equation (4.105) is now identical with the"original" one in the collision density Equation (4.35).Taking into account the definition of the collision kernel given in Equation (4.33), thenew kernel in Equation (4.107) can be expressed in terms of the cross sections asnITSC(E~»E'|r) = - (4,108)rx(r,E )B. SOLUTION OF THE VALUE EQUATIONS (ADJOINT MONTE CARLO)The comment in the previous section that the value equations can be solved by <strong>Monte</strong><strong>Carlo</strong> in the same way as the collision equations is per se valid for the modified valueequations, too.The modified values can be exp<strong>and</strong>ed into Neumann series, <strong>and</strong> the correspondingrecurrence is given by the following equations:(T„(r,E) = f,(r, E)X 0(r,E) = Jdr'T(r'->r|E)4/ 0(r',E) (4.109)for the zeroth terms <strong>and</strong>4» 1+I(r,E) = JdE 1 C(E^E-Jr)X 1(F 1E')X l + 1(r,E) =jdr'T(r'-*r|E)ikr',E)for i + 1 = 1, 2, . . . ,no.The <strong>Monte</strong> <strong>Carlo</strong> realization is similar to that given for the collision densities in Section4.IV.D.:1. Set i = 0. Select initial coordinates (r 0,E„) fromI 4(TjE)drdE?4r,E)
130 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculations<strong>and</strong> set initial weight tow 0=IJdFdEf 41(F,E)2. Select next collision site r 1 + 1fromTXr^rJE 1)drT(r—r|E.)<strong>and</strong> multiply the initial weight bydr T(F 1-^r)E 1)3. Select the next energy E 1 +, <strong>and</strong> direction from1C(E-E 1Jr 1 + 1)JdEC(E-E 1Jr 1 + 1)<strong>and</strong> multiply the weight byC(E 1 + 1-E 1Ir 1 + 1) f .C(E 1 + 1-^EJr 1 + 1)4. Set i = i + 1 <strong>and</strong> return to Step 2.Note that here in the adjoint game the value (Jr 1is represented by the ' 'source" coordinatesthus 4* is the counterpart ofX<strong>and</strong> x is the counterpart of In other words, the value of aparticle leaving a collision is the density of pseudo-particles entering a pseudo-collision,<strong>and</strong> vice versa.Two steps of this cycle are further discussed in the following. First, we analyze the newsource term, the pay-off function. In Section 1). an explanation is given as to why a distortedkernel (C) in Step 3 replaced the adjoint collision kernel C.C. SAMPLING THE ADJOINT SOURCEAs has already been seen in Section A. of this Chapter, in the adjoint game the payofffunction plays the role of the source. On the other h<strong>and</strong> the pay-off describes the quantityto be determined, or simply the characteristics of the receptor, if we use this word in ageneral sense. Thus, with a slightly loose terminology one can say that the physical receptoris the adjoint source.Several examples of pay-off functions are given in Section 4.V.C. Let us first remindthe reader of the problems of estimation of the flux-at-a point. The pay-off function givenin Equation (4.71) could not be used as a score in the direct simulation, however, is anideal function for selecting the initial coordinate in the adjoint game. The relationf,„(r,E) = 5(r -rjmeans that all particles start from r = r„, that is the adjoint source is a point source.
13!The flux-at-a point pay-off given in Equation (4.80) was obtained via a relatively longderivation <strong>and</strong> could be used in the direct simulation — at least if the point of interest wasnot imbedded in media having non-zero cross sections.At the same time this pay-off formula is useless for the adjoint simulation, since itssampling is complicated.There may be problems where it is easier to determine the pay-off ofparticles. If the form of fx (r,E) is more convenient for adjoint source samj). •>start the simulation cycle from it. Taking into account Equation (4.53) <strong>and</strong>given in Section B. such a simulation leads to the omission of the very first stethat there will be no points representing the adjoint source particles, but theof all further movements of the pseudo-particles is numerically simulated. Astitute for the missing adjoint source term is given in Section F.I). THE COLLISION KERNEL OF THE VALUE EQUATIONIn the definition of the collision kernel given in Equation (4.33) both the ithe denominator have their physical meaning. If we integrate C(E'-*E|r) ovenergies after the collision:C*the result ("* is the expected number of particles leaving a collision at the site r,If there is no multiplicative event, C* is the non-absorption probability, i.e., less thanunity. For non-multiplicative, nonabsorbing materials C* = 1. If multiplicative interactions<strong>and</strong> events leading to absorption of the incident particle without emission of secondaries ofthe same type can take place in the same medium, C* may be either smaller or greater thanunity. However, it follows from the physics of the interactions that C* cannot be substantiallygreater than two. Thus, the statistical weight corrections applied in parallel with the normalizationof the collision kernel (see Section 4.IV.E.2.) do not cause extremely large weigh-:fluctuations.This is not the case with the adjoint collision kernel. First of all, it should be emphasizedthat the integral(4, HO)that should be used for the normalization has no physical meaning. It follows from Equation(4.108) that the evaluation of the integral given in Equation (4.110) means the calculationof terms of the form(4..1 II)<strong>and</strong> such integrals may have extremely high values. Consequently, very large fluctuationsmay occur in the statistical weight <strong>and</strong> thus in the score contributions.There are, in fact, cases when the integrals given by Equation (4.111) are even divergentLet us show this in two examples. First, consider the Klein-Nishina formula describingthe Compton-scattering of photons.
132 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> CalculationsasThe differential cross section given in Equation (3.9) can be rewritten in terms of energyE' E e e ,a(E->E') = _ + + / i + - 17E E E' V E E '2(4.112)where e is the electron rest mass energy (m ec 2~ 0.511 MeV), the value of the constant kis not relevant at the moment. From the energy ratio relation given in Equation (3.8), thelimiting values of E (the energy of a real photon before a real collision which is the energyof a pseudo-photon after a pseudo collision) areE sj E
If the scatterer atom is hydrogen, then A a = 0, i.e., the integral given in Eq(4.114) is again logarithmically divergent.These two examples clearly demonstrated that the fac(4,110) for the normalization of the adjoint collision kernphoton <strong>and</strong> in neutron transport calculations.The methods of solution are basically the same for the two types ofmethod is based on the fact that there is always an upper limit for energieis no use in following the history of any pseudo-particle whose energysource (the real, physical source). Let us denote the maximum source tthe new energy E can be selected from the distorted kernelC(E-^E') = •C(E->E'),0,if E E.ifENow, for the normalization the integral becomes:jdEC(E-*E') = jdEC(E-»E')<strong>and</strong> this integral is convergent for all finite E M's.A disadvantage of this method is that the form of the new collision kernel is problemdependent. A change of the source leads to change of the kernel,A better approach is the distortion of the collision kernel In. the whole energy rangeindependently of the highest source energy. If the distored kernels are defined asC(E->E') = |-EC(E-+E')then the normalization factor ofdEC(E-^E')is bounded. Proofs are given in the literature both for photons 16 <strong>and</strong> for neutrons. 9It follows from Theorem 4.10 that if the EVE distortion is applied, the weight has tobe multiplied by E/E' (E > E') after every pseudo-collision. At first sight it may seem thatnow the weight factor may become unbounded. This problem is solved again by the practicallimitation that no pseudo particles collided to above E Mare followed further.Several techniques developed for sampling the adjoint collision kernels are described<strong>and</strong> compared in two papers of DeMatteis <strong>and</strong> Simonini. 6 - 7for neutron <strong>and</strong> photon transport,respectively.Finally, we should like to call the attention of the reader to the fact thaintegrals like that given in Equation (4.110) may depend on the choice of(This statement is not a physical nonsense, since the quantity C* has no physi. U
134 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> CalculationsThe collision kernel can be expressed in terms of wavelengths from the conditionC(X->X')dX' = C(E~->E')dE' (4.116)since these two quantities describe the same physical probabilities. From Equations (4.115)<strong>and</strong> (4.116) the collision kernel is(E') 2C(X-»X') - --' C(E-^E')e<strong>and</strong> now the integraljdXC(X-^X')is convergent.It can be proved 16that this transformation leads to the same sampling as the applicationof a distortion factor (E7E) 2in the energy representation.Hoogenboom 9 described the energy of the neutrons in lethargy (u) units:u = logE 0Ewhere E 0is a reference energy. In this presentation the relationdu ~dEH"automatically" introduces the ~E~ 1distortion <strong>and</strong> thusJduC(U-Hi')is convergent.E. SCORING IN THE ADJOINT MONTE CARLOIn the way described in the previous sections sequences of points in phase-space aregenerated <strong>and</strong> the densities of these points represent the values of particles entering or leavingcollisions at these points. The knowledge of these densities is the aim of the adjoint treatmentIf one wishes to use the value as importance function in the collision density simulation.However, if one uses the adjoint simulation solely, then relation between the value functions<strong>and</strong> the physical quantity (reaction rate) to be calculated must be found.I. Reaction RatesTheorem 4.11 — Let Equation (4.36) describe the outcoming collision density of certainparticles <strong>and</strong> Equation (4.100) describe the value of particles leaving collisions. Then thereaction rate defined by Equation (4.49) can be expressed in terms of the value of theparticles leaving the collision asK - drdE X*(r,E)Q(r,E) (4.117)
Proof.Multiply Equation (4.36) by x*(r,E) <strong>and</strong> Equation (4.100) by \(*\E) anall terms over r <strong>and</strong> E. From comparison of the two equations one concludes:drdEx(r,E)P x(r,E) = J J drdE X*(r,E)Q(r,E)The left h<strong>and</strong> side integral is the definition of the reaction race, as given in fequat'on . IiThe new expression of the reaction rate is extremely plausible. If on 'expressed as:R = JJdrdEr aR« = JJdrdEx(r,E)^- r-'.R«> =[ j d r d E ^ r . E ) ^ ^8(r,E)if Q"' <strong>and</strong> QJ. 1 ' denote the set of sources <strong>and</strong> first-collision sources, respectively.The values R (,)are not statistically independent of each other, since all the estimates arebased on the same representation of the values.
136 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculations3. <strong>Monte</strong> <strong>Carlo</strong> Estimation of the ResponsesIn a fully analog way as described in Section 4.V.C., the responses can be exp<strong>and</strong>edinto Neumann series as<strong>and</strong>S R« = E J/drdE x^E)1=-0 i = o •> J cr(r,bjR= 2 R* = S [ f d r d E ^ ^ ^ E ) (4.121), = 0 ,-0- 1 J cr(r,E)The contributions of the pseudo-collisions can be expressed in the following way:If points (1•,,Ej 5Wi e) represent the E= FI w k c[] w k Tk = 0 k = 0<strong>and</strong>W I XNk = 0Wk,C Wk,TThe score from a total history is again the sum of the contributions, analogs of Equations(4.54) <strong>and</strong> (4.55) are to be used.The division by the cross section in Equations (4.122) <strong>and</strong> (4.123) is not a source ofpossible divergencies here if there is a void in the system investigated since no collisiontakes place in vacuum.Analognus to the problems of the flux-at-a-point estimation in the direct simulation, theadjoint contribution cannot be easily calculated if the source is point-like.Thus, as a rule of thumb, we can state that direct simulation is effective for geometrieswith detectors extended in phase space <strong>and</strong> adjoint simulation can work well if the sourceregion is large. Neither of the two types of games is promising if both the source <strong>and</strong> thereceptor are point-like.In the example of the flux integral Chapter 4.V.D. we have demonstrated that the useof the two collision densities may lead to two types of estimators: one based on the eventdensities (see Equation [4.58]), the other based on the expected path lengths. It follows that,according to Equation (4.65) the sum of either the expected or actual track lengths in therecpetor volume is an unbiased estimator of the flux integral.
137Let us assume now that the source is uniformly distributed over a certain spatial regionv, (see Equation [4.81])IIq(E), if i* e vV.4-TTsQOv-E)0, otherwiseThen the reaction rate given in Equation (4.118) becomes:R = -4- IdEq(E) drx(r,E)cr '(r,E) (4.124)V s4TT JJy,Substituting Equation (4.105) into Equation (4.124) one gets:(dEq(E) f dra '(r,E) =|dr'ij»(r',E)T(r'-^r|E)Now by interchanging the integrations over r <strong>and</strong> r' <strong>and</strong> then the two symbols themselvesthe reaction rate becomes:1V.4TTJdrdEv]i(r,E)q(E) |dr'CT-^r\E)T(r-^r'|E) (4.125)The last integral in Equation (4.125) is the expected path length of a particle startingto fly from r with a direction <strong>and</strong> energy E. (A proof can be constructed via transformationof the transition integral into one dimensional form, in the same way as for the derivationof Equation [4.85].)Thus, if points representing the 4» modified value are obtained during the simulation,the contributions to the score are products of the source intensity (on the energy selected)<strong>and</strong> the expected path length of the pseudo-particles traversed in the source region. A similarresult was derived for the flux-at-a-point of the uncollided real particles — at the very endof Chapter 4.V.In mathematical terms, if i = 1, 2, . . . ,n points (r„E 1,W 1) represent the modifiedvalue >|» then the reaction rate can be estimated bynv/hr j.-iwhere is the expected path in the source region:(O = Jdr'rr-Hr'.EJT^r'iE,) = J "dRexpRCT(R')dR'if R 1<strong>and</strong> R 2are the points where the pseudo-particle enters <strong>and</strong> leaves the source region.F. CONTRIBUTIONS OF THE UNCOLLIDED PARTICLESA separate estimate of the contribution of uncollided particles (i.e., particles which havetheir first interaction in the detector volume) may be important, for example, in gamma
138 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationsspectrometry if one wishes to compare the caiculated results with measured full-peak efficiencies.In the <strong>Monte</strong> <strong>Carlo</strong> treatment, we gave estimation formulae separately for the uncollided<strong>and</strong> already scattered particles in the flux-at-a-point example (Section 4. V.D., third example).Later, in the discussion of the sampling of the adjoint source the possibility of playing anadjoint game without estimation of the uncollided pseudo-particle contribution was mentioned.In this Section, we shall prove, that though the collision density simulation <strong>and</strong> theadjoint game lead to basically different sets of collision (<strong>and</strong> pseudo-collision) densities, thecontributions of the uncollided particles in the direct game <strong>and</strong> those of the uncollidedpseudo-particles in the adjoint game are equal to each other.Theorem 4.13 -— Let us define the contribution of the uncollided particles to therate — as a consequence of Equations (4.39) <strong>and</strong> (4.49) — bydrdEQ(r,E)f x(r,E)<strong>and</strong> the contribution of the uncollided pseudo-particles — as follows from Equations (4.109)<strong>and</strong> (4.121) — byR„/|drdE iVr.F.)< A' 1 2 6 )Then the two contributions are equal to each other, that is:R„ = R 0Proof. Let us substitute Equation (4.106) into Equation (4.126) <strong>and</strong> replace -E by E:drdEf li((r,E)Q c(r,E)After substituting the defining Equation (4.38) of the first collision source, then changingthe order of integrations over r' <strong>and</strong> r <strong>and</strong> finally changing the symbols r' <strong>and</strong> r, one gets:R 0= J j dr dE Qi r. E) [dr' T< r-+f |E) ij r'. E) (4.127)to:From the relation of the two pay-offs given in Equation (4.53), Equation (4.127) reducesdrdEQ(r,E)f x(r,E)•A consequence of this theorem is that if the adjoint game is played without the adjoint sourcesimulation, source contribution computed by direct calculation can be added to the contributionfrom the scattered pseudo-particles.VIII. VARIANCESThe formula given by Equation (3.38) is of general validity for computation of the
139empirical variance. It can be used in any <strong>Monte</strong> <strong>Carlo</strong> game resulting in |x,, JX 2, . . . jx,,individual scores from n simulations. Thus, the introduction of the integral equation formalismdoes not influence the simple straightforward a posteriori estimation of the statisticaluncertainty.There is, however, an important benefit of the use of integral equations in the field ofvariance analysis. Equations can be derived, by the use of which efficiencies of techniquescan be estimated a priori. Though the solution of these equations is at least as complicateas that of the collision density equations, even an approximate estimation of the variancesmay clearly indicate whether a certain nonanalog procedure increases the efficiency of thegame, or not.Variance analysis is based on the moment equations. Since these equations are investigatedin detail in Chapter 5, only a short introduction is given below.A. VARIANCE ESTIMATES BY THE MOMENT EQUATIONSThe variance of a certain r<strong>and</strong>om variable is defined as the difference between theexpected value of the square of the r<strong>and</strong>om sample <strong>and</strong> the square of the expected value.If the r<strong>and</strong>om variable in our <strong>Monte</strong> <strong>Carlo</strong> game is the score (x, then the variance is:D 2 O) - ill 2 ) - (li) 2In particle transport, if Q(r,E)dr dE particles start from the phase-space element dr dEabout (r,E) <strong>and</strong> the score depending on the starting point is denoted by |x(r,E) then the totalscore, i.e., the reaction rate, is(jji) = R =clrdEOir.EKp.(r.E»where parentheses denote the expectation over all possible histories started from (r,E). IfM 1(r.E) denotes the first moment of the score, i.e., the expected score due to a particlestarted from P thenM 1(F 5E) = {(x(r,E))<strong>and</strong> the reaction rate reads:R = j JdFdEQ(F.Ei M 1(F 1E) (4.128)It is obvious from the comparison of either the definitions, or, formally, Equations(4.128) <strong>and</strong> (4.100) that the first moment is equivalent to the value of the particles leavingcollisions:M,(r.E)--X*(r,E)Consequently, the integral equation of the first moment is (see Equation [4.1.00]):M,(r,E) == f x(r,E)JJdr'dE'T(r-> r'|E)C(E-»E'|r')M,(r\E') (4.129)The reader should be reminded, here, of our comment at the end of Chapter 4.III.C.that in most papers the collision density of particles entering a collision is used solelySimilarly, in most treatments the value of the ingoing particles (»j;*) is the only adjoint
140 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationsdensity introduced. Consequently, the first moment is related to the ingoing value as:M,(r,E) =Jdr'T(r^r'!E)rj)*(r',E)Only this treatment is followed in the remainder of this book, too. In consequence thepay-off is defined uniquely <strong>and</strong> the "source term" of Equation (4.129) is replaced (seee.g., References 1 <strong>and</strong> 5) bydr'T(r->r'lE)f;„(r',E)according to Equation (4.53).Thus, the first moment in the ingoing collision reads:M 1(F 1E)JJdr'T(F-^rIEIf 1Xr'.E)+• JJdr' dE' T(r-*r'|E) CiK-E^r' M,(r' .E'l (4.130)The expected value of the second moment is defined by the relation:(p. 2 ) = JdrdEQ(r,E)M 2(r,E) (4.131)In the RHS of Equation (4.129) the first term describes the immediate pay-off, thesecond one is the contribution of the future collisions. Heuristically, the square of this sumis the sum of the squares of the two terms plus the twice of their product. Consequently,the second moment Mar.E) in Equation (4.131) is the solution of the following integralequation:M 2(r,E) = f 2 (r,E) + 2f x(r,E) J|dr'dE'T(r-*r'|E)C(E->E'ir')M,(r',E')'drdE'T(r-^r'|E)C(E-»E'|r')M 2(r',E') (4.132)A score is received when a particle enters a collision rather than it leaves, <strong>and</strong> theimmediate pay-off is f, KThe two first moments given in Equation (4.129) <strong>and</strong> (4.130) areidentical to each other which means that neither of the two estimators gives biased results.The second moments are, however, different from each other. With the same philosophyas applied for the introduction of Equation (4.132), the second moment of the estimatorbased on the ingoing density Mf reads:M 2Xr 1E) = jdr'T(r->r'|E) fJ(r',E)+ 2j r JdrdE'T(r-^r'!E)f^(r',E)C(E^E'!r')M 1(r',E')+ J|dr'dE'T(r-^r'!E)C(E-~>E'|r')M*(r',E') (4.133)This formula is given in Chapter 5.
141The difference between Equations (4.132) <strong>and</strong> (4.133) can be explained in the followingway: if scoring is undertaken when a particle leaves a collision, then ttV coptrh»»*io»> < ,f/«**••free-flight up to the next collision site is calculated from the expected pall v h>'>r 11is executed when the particle enters the collision we already have ah ,., n
142 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculations17. Leimdorfer, M., A <strong>Monte</strong> <strong>Carlo</strong> method for the analysis of gamma radiation transport from distributedsources in ionizated shields, Nukleonik, 6, 58 (1964).18. I .twins. J., Importance, The Adjoint Function, Pergamon Press, Oxford (1965).19. Matthes, W., Calculation of reactivity perturbations with the <strong>Monte</strong> <strong>Carlo</strong> method, Nucl. Sci. Eng., 47.234 (1972).20. McGrath, E. J., <strong>and</strong> Irving, D. C, Variance Reduction. ORNL-RSIC-38 Report, Techniques for Efficient<strong>Monte</strong> <strong>Carlo</strong> Simulation, Vol. III., Oak Ridge National Laboratory, Oak Ridge (1975).21. Noack, K., On the relation between adjoint <strong>and</strong> importance in <strong>Monte</strong> <strong>Carlo</strong> solutions of linear particletransport problems, Part I, Kernenergie, 22, 346 (1979).22. Noack, K., On the relation between adjoint <strong>and</strong> importance in <strong>Monte</strong> <strong>Carlo</strong> solutions of linear particletransport problems, Part 11, Kernenergie, 23, 372 (1980).23. Rief, H., Generalized <strong>Monte</strong> <strong>Carlo</strong> perturbation algorithms for correlated sampling <strong>and</strong> a second-orderTaylor series approach, Ann. Nucl. Energy, 11, 455 (1984).24. Schmidt, F. A. R., Status of <strong>Monte</strong> <strong>Carlo</strong> development. IKE Bericht No.4-3. lnstitut fur Kernenergetik,Universitat Stuttgart (1972). (Reprint from "Numerical Reactor Calculations". International Atomic EnergyAgency, Vienna, 1972.)25. Sobol, I. M., The <strong>Monte</strong> <strong>Carlo</strong> Calculational Method (in Russian), Nauka, Moscow (1973).26. Thompson, W. L., Duetsch, O. L., <strong>and</strong> Booth, T. E., Deep-Penetration Calculations, in A Review ofthe Theory <strong>and</strong> Application of <strong>Monte</strong> <strong>Carlo</strong> <strong>Methods</strong>, ORNL/RSIC-44 report, Oak Ridge National Laboratory,Oak Ridge (1980).
143Chapter 5THE MOMENT EQUATIONSWe have so far reviewed the main idea behind the transport <strong>Monte</strong>the basic techniques of performing a <strong>Monte</strong> <strong>Carlo</strong> game, A direct atechniques may be sufficient when one intends to build up a simple Mori < ,, >for the occasional solution of a simple problem. However., transport M i« ,n -used for complicated problems, the solutions of which necessitate exwork, require a large amount of computing time, <strong>and</strong> usually are to be swith different parameters. For the solution of large-scale <strong>Monte</strong> Carlenumber of advanced general- <strong>and</strong> special-purpose <strong>Monte</strong> <strong>Carlo</strong> computervHU ''•been developed <strong>and</strong>. in all probability, will also be elaborated upon in iii r KIn such cases, when a considerable amount of programing <strong>and</strong> long ruit is far from immaterial what the efficiency of a program is. In Moefficiency is defined as the inverse of the product of the variance <strong>and</strong> n k< < < ;'.,M ,necessary for estimating the required quantity with the given variance. If < i vL i L \m .in comparing the capabilities of existing codes. It is more important, howevtinformation on the efficiency of a given method a priori, so that the program d
144 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationswhere, as before, v)i(P) is the collision density of particles at the phase-space point P <strong>and</strong>f(P) is some given weight function. R is called a reaction rate since if a r(P) is the crosssection of the reaction r <strong>and</strong>f(P) = o r(P)/ar(P) Xv(P)Xv(P) being the characteristic function of some phase-space domain V, thenR = jdPiKP)a r(P)/o-(P) = |dP (p(P) (j,.(P)is the rate of the reaction r in the domain V.Note that the integrations, unless explicitly noted otherwise, are always assumed toextend over the entire phase space. For the integrals of functions that are defined only overa part of the phase space, the definition of the functions is tacitly extended to the entirespace, with the function taken as zero outside the original domain of definition.We have seen in Chapter 4 that the integral, Equation (5.2), can be estimated in a <strong>Monte</strong><strong>Carlo</strong> game by simulating the particles' collision density in a number, N, of historiesaccording to the transport equation <strong>and</strong>, at the i-th collision point of the a-th history, P a,,the quantity f(P„ ,) is added to the estimate. Then the estimateS ? ? f(P ° Jis unbiased with respect to R in Equation (5.2), i.e.,JdPvkp) f(P) = (^2 2 f(P,„)>Now, denotingM-(P,,,,) = Ef(Pa.i)p,(P„ „) is the score due to the history that was started from the point P a„. If M 1(P) denotesthe expectation of |x(P), then u.(P„ 0) is an unbiased estimate of M 1(P) <strong>and</strong>, if the startingpoint P a„ is selected from the source density Q(P 11„), the score~ 2M-(P 1.,) is an unbiased estimate of the integral, i.e.,R = (jjf E M-(Pa...)) = JdPQ(PjM 1(P) (5.3)It is heuristically obvious that an equation that describes the pointwise expected score,M 1(P) 1is more naturally related to the actual simulation procedure than the particle-transportequation, which does not account for the weighting function, f(P) — a quantity very characteristicof the goal <strong>and</strong> technique of the estimation. It will be seen later in this chapterthat the equations governing the various moments of the score are, indeed, very useful inthe analysis of the quality of various <strong>Monte</strong> <strong>Carlo</strong> techniques. In the next section, we showhow the equation that describes the expected score, M 1(P) 1is related to the equation adjointto the integral transport equation.
MSA. RELATION OF THE EXPECTED SCORE TO THE ADJOINT COLLISIONDENSJTYAs was seen in Chapter 4.IV, the collision density, fi/(P), satisfies the integral transportequationiMP) - ik,(P) + JdP"»|;(P")K(P",P)where >K.(P) < sthe first-flight collision density.K,(P) = J dP'Q(P')T(P',P)(SA.<strong>and</strong> Q(P) is the probability density of the source particles. Recall that the transport kerrse.iK(P",P) is related to the transition kernel T(P',P) <strong>and</strong> collision kernel C(P",P') asK(P",P) = |dP'C(P",P')T(P',P) (5.6;whereT(P',P) = T(r'->r|E)o(E' - E) 0.7;<strong>and</strong>C(P".P') = C(E"->E'jr")5(r" - r') (5.¾)while T(r'-*r|E) <strong>and</strong> C(E"-->E'[r") are given in Chapter 4.1V. In Chapter 4.VTL it wasproven that an equation adjoint to the integral transport Equation (5.4) has the formi|/*(P) = f(P) + dP"K(P,P")i|
146 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> CalculationsEquation (5.11) becomesR =[dP Q(P) M ,(P)This is the same equality as in Equation (5.3) <strong>and</strong> it is concluded that the quantity definedby Equations (5.12) <strong>and</strong> (5.9) is the expected score due to a starter from P. The meaningsof the functions t]f"(P) M 1(P) are heuristically clear. They represent the expected futurecontribution (or "importance") of a particle entering a collision at P or leaving a collisionat (starting from) P, respectively.An equation that describes M 1(P) follows easily from Equation (5.9) by multiplying itby T(P,P') (after changing P to P') <strong>and</strong> integrating with respect to P':M 1(P) = j dP'T(P 1P 1 K(P') + |dP" L(P 1P") M 1(P") (5.13)where, with Equation (5.6).L(P,P") = IdP'T(P,P')C(P'.P") (5.14)It will be seen in the following Sections that higher moments (<strong>and</strong> in certain cases, momentsof other functions) of the particle's score obey similar equations. (Higher-order momentequations will be seen to be expressed in terms of successively determined lower-ordermoments.) Equations of the type represented by Equation (5.13) will be called the momentequations.Although normally we do not attempt to solve these equations, the existence <strong>and</strong> uniquenessof the solutions will often be exploited. In the next section, conditions are given underwhich the solution of an equation of the form of Equation (5.13) uniquely exists, <strong>and</strong> someconsequences will be discussed.B. CONDITIONS OF EXISTENCE AND UNIQUENESSThe majority of the results quoted here are proved in the basic textbook 42by Spanier<strong>and</strong> Gelbard. The difference between the derivations there <strong>and</strong> here is that in Spaniers' bookthe conditions of existence <strong>and</strong> uniqueness of the solution to the transport equation (5.4)are established, while we are interested in conditions that grant a unique solution to themoment equation of the Equation (5.13) type. It is, however, easy to see that by puttingK(P",P) -» L(P,P")in the original derivations in Reference 42, the assertions below remain valid. Let us writeEquation (5.13) in the shortened formM(P) == I(P) + dP"L(P,P")M(P") (5.15)where I(P) is a known function <strong>and</strong> L(P,F') is defined in Equation (5.14).Note that if the <strong>Monte</strong> <strong>Carlo</strong> simulation is performed according to the kernels T(P,P')<strong>and</strong> C(P',P") (i.e., if the site of the next collision <strong>and</strong> the posteollision coordinates areselected from T <strong>and</strong> C, respectively) then Equation (5.15) has an evident <strong>Monte</strong> <strong>Carlo</strong>interpretation. The expected future score of a particle departing from P consists of two parts.
The source term of the equation. 1(P). represents the expected direct score due to l>- >started from P (first-flight contribution), while the integral term is interpreted as thsscore due to the rest of the history, since L(P,P")(iP" is the probability that a PIdeparts from P will emerge from its next collision in the phase-space element dP<strong>and</strong> M(P") is the expected score of the emerging particle.As for the solution of Equation (5.15), the following theorem holds:Theorem 5.1 — Equation (5.15) has a unique, bounded solution if the following;conditions are met:1. There exists a constant B < ac such thatsup dP"L(P,P") =s B (5,(6)p J2. There exists a constant b < 1 <strong>and</strong> an integer N such that for n 3* Nsup dP"L„(P,P") « b < I p i /;p -'where the iterated kernel is defined asL n(PJP") = JdP 1JdP 2... fdP nL(P,P,)L(P 1,P 2)...L(P n,P") (5.18)L,(P,P") ••= L(P 1F)3. There exists a constant I < °° such thatsup l(P) =£ IpFor the proof of the theorem, the derivation in Reference 42 applies, with minor changesin the notations after inserting L(P,F') in place of K(P,F') in the original proof.Let us shortly investigate what these conditions imply in realistic problems. It followsfrom Equation (5.14) thatJdP"L(P,P") --JdP'T(P 1P')c(P')wherec(P') = jdP"C(P',P") (5.=9)c(P') is the mean number of secondaries in a collision at P', i.e.,c(P') = VTS?') + va f(P')]/cr(P') (5.20;
148 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> CalculationsEquation (5.16) is rewritten assup dP'T(P,P')c(P') « B < xNow, in realistic <strong>Monte</strong> <strong>Carlo</strong> games, this condition is always satisfied sincet = sup dP'T(P.P') ss 1 (5.21)p<strong>and</strong> alsoC = SLip C(P') < +=c (5.22)p'which means that the condition holds with B =fc:sup dP"L(P,P") < t • c
149<strong>and</strong> C(P',P"). Then the first two conditions of Theorem 5,i can be interpreted as follows:The iterated kernel L n(P,P")dP" is the expected number of particles present in the simulationafter n collisions when the initial particle starts at P. Thus, condition 1 excludes the possibilityof an infinite number of progeny due to the collision of a single particle. On the other h<strong>and</strong>,condition 2 amounts to saying that after no more than N collisions, the total expected numberof particles in the system will be less than unity. Repeated use of condition 2 shows thatafter kN collisions, the expected number of particles is less than b\ i.e., it tends to zero asthe number of collisions increases. In other words, the probability of a history with aninfinite number of collisions is zero. Thus, the conditions of Theorem 5.1 ensure the feasibilityof the <strong>Monte</strong> <strong>Carlo</strong> simulation which is performed when using the transition kernelT(P.P') <strong>and</strong> collision kernel C(P',P").Similarly, the <strong>Monte</strong> <strong>Carlo</strong> interpretation of the Neumann series solution, liquation(5.23), is evident: the n-th term of the sum is the expected contribution due to the n-thcollision <strong>and</strong> (n + |)-st flight. Condition 3 makes these scores bounded <strong>and</strong> condition 2ensures the boundedness of the expected final score as well.C. ANALOG AND NONANALOG SIMULATIONIn the <strong>Monte</strong> <strong>Carlo</strong> interpretation of the mathematical results concerning the momentEquation (5.15), we have repeatedly assumed that the simulation is performed according tothe real physical source <strong>and</strong> kernels, i.e., the kernels in the game have the same forms asthose in the transport equation. Simulations of this kind are called analog, since theyreproduce the real physical phenomena (as realistically as the transport equation describesthe particles' collision density). In most applications, however, the actual <strong>Monte</strong> <strong>Carlo</strong>simulation deviates from the analog case. Examples of such deviations have been presentedin Chapter 3.II.<strong>Monte</strong> <strong>Carlo</strong> games that do not follow the real phenomena are called nonanalog As alsodiscussed in Chapter 3.II, in a nonanalog game the particles do not represent real physicalentities <strong>and</strong> in order to ensure an unbiased final estimation, statistical weights are assignedto the particles. These weights may change from event to event <strong>and</strong>, roughly speaking, theycompensate for the deviation of the particles' histories from a corresponding analog history.Nonanalog games are usually introduced in order to increase the efficiency of the simulation.In certain cases, use of nonanalog simulation is vital since, in practice, there would be nohope of obtaining reliable estimates by any analog method. (This is the case, for example,when penetration of radiation is modeled very deep in matter.)When introducing a nonanalog <strong>Monte</strong> <strong>Carlo</strong> simulation, three basic questions are to beanswered:1. How should the statistical weights of the particles be generated so that the expectedfinal score is the same as in the analog game, i.e., what are the conditions of anunbiased nonanalog simulation!2. Under what conditions is a nonanalog game feasible, in the sense of feasibility definedin the previous section?3. What gain in efficiency is expected from the nonanalog simulation, compared withthe analog <strong>and</strong> other possible nonanalog games?These questions will be reconsidered in Chapter 5.V <strong>and</strong> 5.VIiI <strong>and</strong> the considerations willbe based on the moment equations to be derived in the subsequent chapters.In what follows, the nonanalog source density will be denoted by Q(H 1 .,, s .kernel by f(P,P'), <strong>and</strong> the collision kernel by C(P',P"). With this m VD i> < j
150 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculations1. A starting point P is selected from the source density Q(P) <strong>and</strong> the starting statisticalweight W of the particle is determined. (The weight will depend on how the nonanalogsource density differs from the analog one.)2. The next collision point P' is selected from the transition kernel T(P,P'). The statisticalweight is changed so as to compensate for the bias in the nonanalog kernel. The newweight wall be denoted by W'. If there is some contribution of the free flight from Pto P' to the final score, this contribution is added.3. The number <strong>and</strong> coordinates of the particles (a number of points P"), which emergefrom the collision at P', are selected from the collision kernel C(P',P'). The numberof secondaries must be selected so that its expected value isGenerally, the collision kernel is the sum of kernels that correspond to different events<strong>and</strong> a different number of secondaries, as will be detailed in the next section. Again,the weights of the progeny are chosen so as to account for the weight of the particlethat entered the collision, <strong>and</strong> also for the alteration of the nonanalog kernel, comparedto the analog. The possible scores, associated with the event that the actual numberof particles leave the collision, are added to the final estimate.4. One of the emerging particles (if there are any) is selected, the coordinates of theothers are stored, <strong>and</strong> the selected particle is followed by returning to step 2.5. Tracking of a particle is terminated if no particle emerges from the collision (i.e., anabsorption) <strong>and</strong> also if the particle leaves (either in space or in energy) the systemwith no chance of returning to it. Note that escape may also be considered an absorptionif the spatial region from where there is no return to the simulated system is thoughtto be filled with a black absorber.If the trace of a particle is terminated, another particle from among those that havebeen generated in previous collisions <strong>and</strong> have not yet been followed is started fromits birthplace, <strong>and</strong> the procedure is repeated from step 2.6. The history terminates if there is no particle left in the system.In step 5 above, the idea of a vacuum-equivalent black absorber is raised. This substitutionmerits further discussion. Let us call the spatial region, V, where the simulation isperformed the domain of simulation. Unless it is the entire geometrical space, it will beassumed to be surrounded by vacuum. The domain of simulation can safely be regarded asconvex, since even if the physically interesting spatial region is concave, a line connectingany two points of this region may be a part of the r<strong>and</strong>om walk. Now, if the domain ofsimulation is not the entire geometrical space, the integral of the transition kernel over thedomain in certain directions is not necessarily unity, i.e., the probability of an endless freeflight is different from zero. This would cause some inconveniences in the subsequentderivations. On the other h<strong>and</strong>, since a particle that leaves the domain of simulation has nochance to return to it, it is immaterial from the point of view of the simulation whether therest of the space is vacuum or is filled with any purely absorbing material. Assuming thelatter case <strong>and</strong> denoting by P, the phase-space point at the boundary of the domain ofsimulation which is crossed by a free flight from P = i.r,to.h). the transition kernel usedin the simulation can be redefined asT(P,P') :if r' -v V (5.24)
where T"(P,P') is the transition kernel in the arbitrary purely absorbing medium. For the.collision kernel, letC(P',P") :=0 if r' * V (5.fxWith these definitions, the simulation in the domairof an endless free flight is zero. The equivalent SU-SM )I" > •, » ithe derivationsI). DEFINITIONS AND NOTATIONSThe moment equations to be derived in this Sectiorthe expectation of the score (<strong>and</strong> also of the function: o> 1 * s< , x i 'simulated histories. The scores are accumulated in a n n 1walk of the particles), <strong>and</strong> in order to obtain equationsscore, an equation describing the probability density ofequation is the mathematical formulation of the scoring j, « U icfi n . > iin the previous section. The score-probability density eqiu u> •V t" Ln 'probabilities of the various events (such as transition, aosorpuon, muitiphcauon. ami scattering) <strong>and</strong> from the probabilities that the various events result in a j_i e>
152 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> CalculationsThis means that the reaction r, which takes place at the coordinates <strong>and</strong> weight symbolizedby (...), fully determines the score, <strong>and</strong> this score is just f,(,..) (e.g., if the collision densityin a given region is the quantity to be determined, the score assigned to every reaction isequal to the actual weight of the particle if the reaction is inside the region <strong>and</strong> zero otherwise,as introduced in Chapter 4.V.).The probability densities in Equations (5.26) through (5.28) concern particular eventsin a history. Since the history itself is also probabilistic in the sense that the trajectories ofthe particles are determined by repeated selections from probability density functions (transition<strong>and</strong> collision kernels), the final score in a history will also be a r<strong>and</strong>om variable. Thedensity function of this r<strong>and</strong>om variable is called the score probability <strong>and</strong> is defined asfollows. Let us consider a particle situated at the phase-space point P with a statistical weightW. LetTr(P,W,s)ds (5.29)be the probability that this particle (along with all its progeny) will yield a final score in dsabout s. The final score is the sum of the partial scores gathered by the particle <strong>and</strong> itsprogeny during their histories.Obviously, the expected score due to this particle is expressed by -IT asM{s}(P,W) = J ds • STT(P,W,S)Similarly, the second moment of the final (sometimes called the total) score isM{s 2 }(P,W) = J ds • S 2 TT(P,W,S)<strong>and</strong> thus the variance of the score due to this particular particle isD 2 [s](P,W) =M{s 2 }(P,W) - - M 2 {s}(P,W)In general, if F(s) is some given function of the score, the expectation of this score functionin the history(ies) due to a starter at P with a weight W is denoted byM{F(s)}(P,W) = J dsF(s)iT(P,W,s) (5.30)The notation may seem rather complicated, but is needed to specify all the information (thefunction whose expectation is taken <strong>and</strong> the characteristics of the starter that influence thescore). In the case of the first <strong>and</strong> second moments, we shall use the simpler notationsM{s}(P,W) = M 1(P, W)<strong>and</strong>M{s 2 }(P,W) = M 2(P 1W)Hats above quantities will always denote that they refer to a nonanalog game played withthe kernels T(P,P') <strong>and</strong> C(P',P"). The respective quantities referring to the analog game willbe identically denoted, but without hats.
153The nonanalog transition kernel will be used in its conventional form 47 :whereT(P.P')dP' = 6-(P')exp{-T(P,P')}8(E - E')S(w - t ^ - - — , ) r—- ---dP'\ |r - r'j/ jr - r j~fir I''T(P,P') = dla(r + t
154 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationscoining out of the event. For example, for the multiplicative reaction f (say, nuclear fissiondue to a neutron)jdP"C,(P',P") = v f(P') (5.37)With the conventions above, the mean number of secondaries in a collision is expressed asc(P')= dP"C(P',P") = 2 c r(P> r(P') (5 38)JRThe kernels defining multiplying processes can be decomposed further. For example, forthe reaction fC f(P',P") = E nq, n(P')C,„(P',P") (5.39)where q fn(P') is the probability that n particles come out of the event if one enters at P\<strong>and</strong> C 1 n(P',P") is the density of the daughter particles' coordinates, P", i.e.,JdP"C f,„(P',P") = 1<strong>and</strong>X nq„„(P') = v f(P')N= 1Note that Equation (5.39) for the kernel implies that every secondary has the same distributionC 1n(P',P")- In most practical cases, this assumption is justified. If, for some specific reason,the distributions of the secondaries are different — e.g., for the i-th particle in an n-foldmultiplication, it is CP n(P',F') — then Equation (5.39) is replaced byC f(P',P") = 2 q, n(P') 2 Qi(P',P")II = iI - iThis case will not be discussed; in the following, extension of the considerations to thiscase is straightforward.With the notations above, the selection procedure in step 3 of the simulation presentedin the previous Section can be detailed as follows:1. The type of reaction, r, is selected with a probability C 1(P').2. If it is an absorption, then the tracking of the particle is terminated.3. If it is a scattering of type i, then the postcollision coordinates are selected fromQ,,(P',P").4. If it is a multiplicative event of type f, then the number of particles, n, coming outof the event is selected with a probability q fr,(P') <strong>and</strong> the coordinates of the particlesare selected from C f„(P',P").As was mentioned in the previous Section, in a general nonanalog game, the statisticalweight of a particle that undergoes an event must be properly changed in order to keep the
155simulation unbiased with respect to the analog (physical) simulation,* In the majority ofpractical cases, the change of weight means simple multiplication by some factors thatrepresent the difference between the analog <strong>and</strong> nonanalog simulations. It will be seen,however, in connection with the differential <strong>Monte</strong> <strong>Carlo</strong> simulation, that in certain casesthe weight factors are not multiplicative. Let w(P,P') be the factor that is characteristic tothe modification of the particle's weight when it makes a free flight between the two collisionpoints (or source point <strong>and</strong> collision point) P <strong>and</strong> P' in the nonanalog game. Let w a(P')w s(P',P"), <strong>and</strong> W 1(P',P",,) (i = 1,2,...,n) be the weight factors to be applied when anabsorption occurs at P', a scattering from P' to P", or a collision is played at P'' with noutcoming secondaries <strong>and</strong> the i-th secondary emerges at P'f,, respectively. Naturally, thevalues of the weight factors will depend on the values of the analog <strong>and</strong> nonanalog kernelsIn Chapter 3.11, simple examples of the factors were introduced. The adequate choice ofthe factors in general will be discussed in Chapter 5.V in connection with the conditionsunder which a nonanalog game is unbiased.Finally, we introduce some conventions in the notations. If P = (r,«,E) denotes thestarting point of a free flight, then the coordinates of the particle at the next collision wiilbe denoted by P' = (r',w,E) <strong>and</strong> the coordinates of the i-th progeny that leaves the collisionwill be P",, = (r',CSJID) 5EJ 0). If no distinction is made between the secondaries, the indexwill be omitted. Furthermore, if the weight of the particle at P is W, then its weight whenit reaches P' will be denoted by W, <strong>and</strong> the relation of W to W <strong>and</strong> to the weight factorsis writtenW - U(w(P,P'),W)If an absorption takes place at P', then the weight of the particle (with which it contributesto the score due to the absorption) will be W a , while the particle will leave a scattering witha weight W". The corresponding relations will be denoted asW = U'Xw a(P'),W'), W" = U s (w s(P',P"),W)The weight of the i-th secondary in a multiplying event will be W„ (i)(i = l,2,...,n) <strong>and</strong> ifno distinction is made between the secondaries of an n for one multiplication, the weightof an emerging particle will be denoted by W„. The conventions above are summarized inTable 5.1.TABLE 5.1Coordinates AND Weights of A <strong>Particle</strong> in Successive EventsFlightLeaving aEvent Start End Absorption Scattering MultiplicationCoordinate P P' P' P" P";,, P"weight w W w" w" w;;,„, w;;E. HEURISTIC INTERPRETATION OF THE MOMENT EQUATIONSIn this section, we. attempt to familiarize the reader with the genera! structun •i .L
156 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationsthe score due to a particle started from a phase-space point P will be seen to typically satisfyan equation of the formM 1(P) dP'T(P,P')f(P,P') 4- dP'T(P,P') dP"C(P',P")M,(P") (5.40)In this equation, f(P,P') denotes the partial score contributed to the final score by the particlewhile it makes a free flight from P to P' <strong>and</strong> then enters a collision at P'. Accordingly, thefinal score due to the particle during its history is the sum of the partial scores gathered inthe successive flights <strong>and</strong> collisions that make up the history.Equation (5.40) reflects the fact that moment equations always concern the moments ofthe score produced by a particular starter [the one that starts from P in the case of Equation(5.40)]. (Therefore, the solutions of the moment equations are independent of the sourcedensity of the particles.) The expected score (or any other score moment) in the wholeestimation procedure follows from the pointwise moments by integrating them with thesource density over the entire phase space, as demonstrated in Equations (5.11) <strong>and</strong> (5.12).Equation (5.40) can be interpreted as follows. Since f(P,P') is the score resulting froman intercollision flight from P to P', the first term on the KHS is the expected partial scoredue to the flight started from PI 1(P)The final score due to a starter from P is the sum of the partial (or first-flight) score obtainedin the flight from P <strong>and</strong> the score accumulated in the rest of the history (collided contributions).Obviously, the same is true for the expectations of these scores. The second termon the RHS of Equation (5.40) represents just the expected score due to collided particles.This is so because T(P,P')C(P',P") is the probability density that the starter makes a freeflight from P to P' <strong>and</strong> subsequently collides from P' to P". Since M 1(P") is the expectedscore due to a particle leaving P", the second term on the RHS is the expectation of thescore due to a particle that started from P <strong>and</strong> has experienced at least one collision anywherein the system. In other words, it is the expected score due to collided progenies of the starterfrom P, as stated.We always assume that the analog game is feasible, which is equivalent to the statementthat the moment Equation (5.40) has a unique solution. This assumption provides us witha tool for introducing several unbiased estimators (contribution functions) in place of f(P,P')in Equation (5.40). Obviously, any function that yields the same expected partial score I 1(P)as the original contribution function will result in the same expected score M 1(P) since itwill define a first-moment equation identical to Equation (5.40). This question will beconsidered in more detail in Chapter 5. VI.Equation (5.40) concerns the expected score in the analog game. The analog game isuniquely determined by the physical properties (material composition) of the system investigated.Therefore, when we talk about an analog game, we always mean a simulationdetermined by the physical kernels T(P,P') <strong>and</strong> C(P',P"). For the estimation of differentreaction rates, the same analog game can be used with different contribution functions f(P,P').On the other h<strong>and</strong>, as was mentioned above, a particular given reaction rate can also beestimated with different, appropriately chosen contribution functions.It will also be seen that the very same problem can be solved in many different simulationsby using nonanalog games. Nonanalog simulations define moment equations analogous toEquation (5.40), except that these equations contain nonanalog kernels <strong>and</strong> statistical weights
157to be carried by the particles in order to make the simulation unbiased. A typical nonanalogmoment equation will have the following form:WM 1(P) = JdP'T(P,P')W'f(P,P') + J dP'T(P,P')JdP"C(P',HWM 1(P") (5.41)where M 1(P) is the expected score due to a starter from P which has a weight of unity. Thisequation will be obtained after having shown that the first score moment defined in SectionD is a homogeneous function of the statistical weight, i.e., thatM 1(P 1W) =WM 1(P)The nonanalog first-moment equation (5.41) can be interpreted similarly to the analogequation <strong>and</strong> it reflects that if a starter at P carries a weight W, this weight becomes W'after a flight to P' <strong>and</strong> W" after the flight <strong>and</strong> a collision from P' to P". it is also seen thatif the analog partial score is f(P,P'), the same events in the nonanalog game contribute tothe score by W'f(P,P'). Thus, the moment equations reflect the role of the statistical weightsin the scoring procedure, as was detailed in steps 1 through 6 in Section CIn the same Section, three questions were posed concerning nonanalog games which weanswered with the aid of the moment equations. The first question concerns the choice ofthe weights. The answer is again based on the uniqueness of the solution of Equation (5.40):the weights W' <strong>and</strong> W" are to be chosen such that Equations (5.41) <strong>and</strong> (5.40) becomeidentical. Having introduced such weights, the resulting equation can be examined from thepoint of view of the feasibility of the nonanalog game; this will answer the second questionin Section C. The considerations outlined above are described in Section 5.V.The third question concerns the relative merits of different games. A general measureof the quality of a game is its efficiency. The inverse of the efficiency was seen to be theproduct of the variance per history <strong>and</strong> the computing time per history. In most cases, thecomputing time is roughly proportional to the number of collisions (cf. Chapter 5.V.F).The expected number of collisions per history will be seen to satisfy a first-momentequation of the type in Equation (5.40). The second moment of the score will again be seento be governed by a moment equation. Comparing the second-moment equations concerningtwo unbiased games, in certain cases we will be lead to definite statements about the variancerelations of the two games. (cf. Chapter 5.VIII). An efficiency comparison in general is notpossible, but approximate solutions to the moment equations will make it possible to investigatethe efficiency of specific games. These questions will be addressed in Chapter 7.The second-moment equation in an analog game has the typical formM 2(P) = JdP'T(PX^)P(PX') + 2 J dP' T(P,P') f(P,P') J dP"C(P' ,F') M 1(P')+ JdP' T(P,P')JdP"C(P' ,P") M 2(P")This equation again has a reasonable interpretation. Roughly speaking, it expresses the factthat the expected square of the sum of the first flight <strong>and</strong> collided scores is the sum of therespective expected squares plus twice the expectation of their product. Comparison of suchequations concerning various estimators, f(P,P'), will show the relative merits of the estimators.In what follows, moment equations concerning more <strong>and</strong> more complex games will bederived with mathematical rigor. The most common unbiased nonanalog games will beintroduced by appropriate transformations of the moment equations. The bulk of the den-
158 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationsvations is performed in the greatest possible generality in order to enable the reader to usethe results for newly invented schemes of his own. The very nature of the derivations isquite simple; nevertheless, the great number of functions <strong>and</strong> quantities appearing due tothe general treatment makes the resulting formulas sometimes complicated. In case one isinterested in well-defined specific cases, it is recommended that the formulas be rephrasedafter having specified all the quantities (contribution functions, weights, <strong>and</strong> probabilities)characteristic of the special cases. By doing so, for simple specific cases, the momentequations become equally simple.II. MOMENT EQUATIONS IN NONMULTIPLYIN(i GAMESEquations describing various moments of the score in a nonmultiplying game were firstderived by Amster <strong>and</strong> Djomehri 1for analog simulations where the contributions to the finalscore may originate from scattering <strong>and</strong> absorption events. The theory has been generalizedto track-length estimators by Booth <strong>and</strong> Amster 3 <strong>and</strong> to nonanalog games by Lux. 28 In thefollowing sections, a general derivation is presented which results in equations that accountfor the expectation of an almost arbitrary function of the score in a nonanalog nonmultiplyingsimulation.* Here, <strong>and</strong> in the following Sections, it will be assumed that the nonanaloggame at h<strong>and</strong> is feasible, i.e., that the total weight of the particle in the system tends tozero if the number of collisions increases. In Chapter 5.V, conditions are derived underwhich a nonanalog game which is unbiased with respect to a feasible analog game (i.e.,which results in the same expected score as the analog game) is also feasible.A. SCORE PROBABILITY EQUATIONSFirst, we derive the equation that describes the score probability IT(P,W,S) defined inEquation (5.29). Let us introduce truncated score probabilities by the following definition:let ir K(P,W,s)ds be the probability that a history that starts at P with a weight W <strong>and</strong> consistsof exactly k collisions will yield a total score in ds about s. With this definition, the scoreprobability in Equation (5.29) readsTT(P,W,S) = V Tr k(P,W,s) (5.42)k~ IThe probability density of a score s from a history of exactly one collision satisfies therelationTT,(P,W,S) = JdP'f(P,P')p(P,P',W',s) * p A(P',W a ,s)c A(P') (5.43)where the asterisk denotes convolution with respect to s, i.e.,a(s) * b(s) = J ds'a(s - s')b(s')Note that in nonmultiplying gamesc a(P') - 1 -- JdP''C(P',P'') - 1 - c s(P') = I - c(P')The meaning of Equation (5.43) is obvious: it is the probability that the shortest possible* Further generalizations of the moment equations by Booth, 4 Booth <strong>and</strong> Cashwell, 5 Sarkar <strong>and</strong> Prashad, 41 <strong>and</strong>others, will be discussed in subsequent chapters.
559history from P (i.e., a history consisting of a single flight <strong>and</strong> an absorption) yields a scorein ds about s. This probability is the product of the probabilities that the particle readies apoint P', contributes to the score during the flight <strong>and</strong> in the absorption so that the sum ofthese contributions is in ds about s, <strong>and</strong>, finally, is absorbed at F'. All this is to he summedover every possible collision point P'. Similarly, for k 5= 1Tiv H,(P,W,s) = jdP'T(P,P')jdP"C(P',P")p(P,P',VV , ,s)* p s(P',P",W",s) * TT k(P",W",s) (5.44)Again, ir k+., is the probability density of the score due to a particle that contributes, in thefirst flight <strong>and</strong> in the first collision, a certain score with the given probabilities, <strong>and</strong> the restof the score up to a value in ds about s is due to its k more collisions.Substituting Equations (5.43) <strong>and</strong> (5.44) into Equation (5.42), the equation for the scoreprobability becomestt(P,W.s) = |dP'T(P,P')c A(P')p(P,P',W',s) * p a(P',W%8)f dP' T (P,P') J dP"C(P' ,P") p(P,P',W',s)* p 4(P',F',W",s) * TT(P",W",s) (5.45)So far, nothing has been said about the contribution probabilities p that describe the possiblescores from various events. In almost all the practical applications,* the scores are uniquelydetermined by the coordinates of the events (P, P', or P") <strong>and</strong> by the weight of the particleundergoing the event, i.e., the scores are deterministic:p(P,P',W',s) = 8[s - f(P,P',W')] (5.46)p„(P',W*,s) = S[s - f«(P',W a )] (5,47)<strong>and</strong>p s(P',P",W",s) = 8(s - f S(P',P",W")] (5.48)where the functions f are called the contribution functions, or estimators, <strong>and</strong> their formsare related to the weighting function in the quantity to be estimated [in Equation (5.2)j <strong>and</strong>also to the actual form of the simulation. These functions define the scores contributed bythe particle in an event of the given type. Simple forms of such estimators were defined inChapter 4.V. We have also seen in Chapter 4.V that in the simplest analog simulationf(P,P',W') = f(P), f„(P',W") = f s(P\P",W") = 0is a correct choice, where f(P) is just the weighting function in the integral (5.2). It has alsobeen seen that this is not the only possible choice. In Chapter 5.VI, a theory is presentedwhich allows us to generate an arbitrary number of estimators which all lead to the sameexpected final scores.Examples of nondeterministic scores will be discussed in Chapter 5.IX
160 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> CalculationsWith deterministic scores, the score probability Equation (5.45) is rewritten asTT(P,W,S) = JdP't(P,P')c ;,(P')B[s -f(P,P',W) - f,(P',W«)]+ jdP'f(P,P')JdP"C(P',P")iT[P".W",s - f(P,P',W) - f,(P',P",W")] (5.49)This form of the score probability equation serves as a basis for deriving equations for thescore moments.B. MOMENT OF A GENERAL SCORE FUNCTIONIn this section, we derive an equation that governs the expectation of an arbitrary functionof the score gathered during a history. In order to illustrate the manipulations of the generalderivation, let us first consider a simple special case. Let us assume that an analog monoenergeticnonmultiplying simulation is performed in a homogeneous slab situated betweenx = 0 <strong>and</strong> x = X. Let the total cross section of the slab <strong>and</strong> also of the surrounding of itbe unity, <strong>and</strong> the absoiption probability be c ainside the slab <strong>and</strong> unity outside of it (equivalentblack absorber surroundings). Thus, if (JL represents the cosine of the angle between theflight direction <strong>and</strong> the x axis, one can putP = (x,|x); P' = (X',(JL); P" = (x',|x')<strong>and</strong> the transition kernel reads1T(P,P')dP' =ne - | J ^dx' • 8(|x' - |x)du/IWwhile the collision kernel isC(P',P")dP" = ~ dp/8(x" - x')dx" 0 =£ x =e X', - 1 ^ u.' ^ 1where c =1 — c a, the survival probability. Assume that the quantity to be estimated isR = |dx'iKx')the collision rate inside the slab. In this reaction rate, the weighting function f(x) is identicallyunited inside the slab <strong>and</strong> zero outside it (in other words, collisions inside the slab contributeby unity to the integral), i.e., one can choose the following contribution functionsf(P,P',W) = 1 if 0 « x' X<strong>and</strong> zero otherwise, whilef a(P',W a ) = f s(P'.P",W") = 0Finally, since the game is assumed to be analog, no statistical weights are to be used.DenotingTT(P,W,S) =TT(X 1U.,S)
16!the score probability Equation (5.49) takes on the formTr(X 1U.,s) = T^ 1dx'e!x'x )^8(s - i)M Jc f , , I f 1 ,+ T - T dx'e""'-' 1 - d(x''rr(x',jx',s-- 1)J 2 J-Iwhere the integration is extended from x to X if JX > 0 <strong>and</strong> from 0 to x if JX < 0.Now, let F(s) be an arbitrary function of the score s such that it can be exp<strong>and</strong>ed intoa Taylor series at any value of s. The expectation of F(s) is given in Equation (5.30). Snthis special case, it readsM{F}(x. p.) = JdsF(s)i T(x,|x,s)[If F(s) = s, its expectation is just the expected score due to a particle started from x indirection jx; if F(s) = s 2 , the expectation of F(s) is the second moment of the score producedby the particle.] An equation that describes the expectations of the score function F(s) followsfrom the score probability equation after multiplying it by F(s) <strong>and</strong> integrating over s. It is,however, disturbing that the argument of the score probability TT on the RHS of the equationcontains s — 1 rather than s; therefore, its integral with F(s) will not yield a moment ofF(s), but, rather, the moment of F(s + 1). In order to establish an equation containingmoments of score functions at identical arguments (this will be important in the general casewhen more complicated functions appear in place of s — 1), let us exp<strong>and</strong> F(s) into a Taylorseries around s — 1:^1 d nF(s) = 2 -TTTF(S ~ D„=o n! ds"With this expansion, the expectation of F(s) follows from the score probability equation asM{F}(x,|x) = •r- dx'e- 0 1 '""H dsF(s)8(s - 1)JjX] JJ-=°C2|'dx'e~ < x '- x , , Hi fdx'e^'-^Jdjx'j d(s - 1)1 ^,, = 0 n!• 3"— F(s - 1)ds"Tr(x',p/,s- I.)= — dx' e •
162 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationsthe corresponding equation isM,(x,u.) = £7 1 dx'e""^- + j dx'e" x l / | i I du/IH JAM• [M 1(X',LT') +M{l}(x>')]<strong>and</strong> since M{ 1} = 1 <strong>and</strong> c a+ c = 1, we haveM,(x,p,) = dx'e" < x '- x, " i + -^ 1dx'e""
163This is the general moment equation concerning nonmultiplying nonanalog ;forms of the equation with selected functions F(s) will be detailed in the next icturning to the discussion of the moment equations, however, a number of idestablished by clarifying the role of the statistical weights in the contributiorin the expectation.I _1. It is reasonable to assume that the contribution functions f are linear homogeneousfunctions of the particles' weights, i.e., if a particle undergoing an event with a weightof unity contributes to the total score a value f, then the contribution of a particleWITHa weight W in the same event is Wf. In short,f(P,P',W) =Wf(P,P')(5.5 i)f,(P',W a ) =Wf 11(P')(5.52)<strong>and</strong>f s(P',P",W") = W"f s(P',P")(5,53)2. Similarly, the expectation of any linear combination of some functions is the linearcombination of the expectations of the functions:MJS a,F,(s)J(P,W) = V 3iMjF 1(S)KP,W) (5.54)3. Since the score in a history is proportional to the starting weight of the particle, thescore probability satisfies the relation*ir(P,l,s)ds = 7r(P,W,Ws)d(Ws)Consequently, for the expectation of any functionM{F(s)}(P,W) = M{F(Ws)}(P, 1) (5-55)C SPECIAL CASES: EXPECTATION AND SE(OM) MOMENT OF THESCOREIn the majority of the applications, the score function F(s) takes on very simple forms.The most important among them areF(s) = s rwhich give the r-th moment of the score. Trivially, for r = O (F = 1), the constant M„ ==M{1} = i satisfies Equation (5.50), which is not surprising since, TT being normalized tounity:M 0= ds TT(P,1,s) = 1This relation <strong>and</strong> therefore also Equation (5.55) is only true if the simulation is independent of the statistics!weight of the particle. In the majority of the cases discussed in this chapter, it is indeed so. An example ofthe opposite case will be given in Section 5.III.D in connection with the splitting procedure.
164 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> CalculationsFor r = 1, after making use of the identities in Equations (5.51) <strong>and</strong> (5.55) Equation (5.50)the first moment equation becomesWM 1(P) = |dP'T(P,P')[W'F(P,P') + c a(P')W a f a(P')fdP"C(P',P")W"f s(P',P")]fdP'T(P,P')JdP"C(P' ,P")W"M,(P") (5.56)where, for the sake of brevity, we introduced the notationM 1(P) =M{s}(P,l)for the expected score due to a starter of unit weight at P. It again should be stressed that,although nothing has been said so far about the statistical weights W', W\ <strong>and</strong> W" thatappear in the equations, they are assumed to be known. Their generation rule will grant theunbiasedness of the nonanalog game, i.e., that the expected score be the same as in theanalog game for which it substitutes. Consequently, the only unknown in Equation (5.56)is the expectation M 1(P) <strong>and</strong> it is entirely determined by the equation.In an analog game governed by the kernels T(P,P') <strong>and</strong> C(P',P"), the statistical weightof a particle does not change during the simulation, i.e.,W" = W' = W a = WThus, denoting the contribution functions that are applied in the analog game by f(P,P'),f a(P'), <strong>and</strong> f s(P',P"), respectively, <strong>and</strong> the expected score due to a starter of unit weight byM 1(P), Equation (5.56) for an analog game takes on the formM 1(P) • JdP'T(P,P')[f(P,P') + c a(P')f a(P')+ JdP"C(P',P")f s(P',P")] + JdP' T(P,P')jdP"C(P', F)M 1(P") (5.57)Note that with the simplest choice of the contribution functions, such as f a= f s= 0 <strong>and</strong>f(P,P') — f(P'), Equation (5.57) reduces to Equation (5.13) derived by heuristic arguments.Equations (5.56) <strong>and</strong> (5.57) provide us with the tools necessary for the characterization <strong>and</strong>discussion of different nonanalog <strong>and</strong> analog <strong>Monte</strong> <strong>Carlo</strong> schemes. In Chapter 5.V, theseequations are investigated <strong>and</strong> conditions established with respect to the statistical weights<strong>and</strong> contribution functions under which the nonanalog game provides an unbiased estimateof the reaction rate in Equation (5.2).As for the second moment of the score, let us insert F(s) = s 2 into Equation (5.50).By taking advantage of the identities in Equations (5.51) through (5.55), the equationbecomesW 2 M 2(P) =JdP'T(P,P')c a(P')|W'f(P,P')+ WT 3(P')] 2 + 2 Qj|dP'f(P,P')JdP"C(P',P")[W'f(P,P')+ W't(P',P")] 2 --''(W")'M r(P") (5.58)
165where again we have putM 2(P) =M{s 2 }(P,S)for the second moment of the score due to a starter of unit weight at P. No surprise, thesecond moment satisfies an equation which contains also the first moment. Therefore, thesolution of Equation (5.58) still may be more difficult than the determination of the expectedscore. In what follows, we do not attempt to solve this equation analytically, instead. Equation(5.58), together with Equations (5.59) <strong>and</strong> (5.60) below, will be used in Chapters 5,Vi <strong>and</strong>5. VIII. for the analysis of the relative magnitude of the variance of games with differentcontribution functions <strong>and</strong> different nonanalog kernels.For an analog game, Equation (5.58) readsM 2(P) -- dP'T(P,P')c a(P')lf(P,P') + f a(P')] 2+ V Q JdP'T(P,P')[dP"C(P',P")|f(P,l > ') -i- f s(P'.P")rrM,.(P"j+ JdP'T(P,P')|dP"C(P',P")M 2(P") (5.59)It can be seen easily that the equations describing the second moment of thebe cast into a form which contains the variance as an unknown. For the sakeillustrate this statement with the analog case. Denoting the variance of theunit weight starter byD-YP) = M 2(P) -M-(P)<strong>and</strong> subtracting M 2 (P) from both sides of Equation (5.59), we obtainD 2 (P) -- D 0(P) + Df(P) -2R 01(P)+ JdP'T(P,P')JdP"C(P',P")D 2 (P") (5.60)whereDl(P) = jdP'T(P,P')c a(P')[f(P,P') + f a(P')] 2- {jdP'T(P,P')c a(P')[f(P,P') + f a(P')]} 2Df(P) = dP'T(P,P') dP"C(P',P")|f(P,P'l f f„(P\P") + M,(P")f- {JdP'T(P,P')[dP"C(P',P")[f(P,P') ~i f.(P',P") -< M 1(F)IP<strong>and</strong>R 01(P) = j|dP'T(P,PX(P')[f(P.P') + f„(P')]}x \ |dP'T(P,P') JdP"C(P',P")(f(P,P') + i s(P',F) + M 1(P";!-
166 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> CalculationsWe note without discussion that by arguments similar to those above, equations equal tothose presented here may be derived that describe the score moments of a particle that isjust about to enter a collision. 27I). AN ANALYTIC Al. EXAMPLEIn Appendix 5A, the moment equations for the idealized particle transport in a homogenousnonmultiplying slab is solved analytically in a monoenergetic Fermi scattering approximation.The particles are incident perpendicular to the surface x = 0 of the slab <strong>and</strong>they propagate parallel to the x axis. We illustrate the results of this chapter by calculatingthe expected number of particles reaching the surface x = X of the slab (transmissionprobability), the number of particles returning to x = 0 (reflection probability), <strong>and</strong> theexpected number of absorbed particles (absorption rate) due to one starter.The quantities above may be written in the form of Equation (5.2)R = Jdxu)(x)f(x)with the weighting functionsf(x) = 8(x — X)for transmissionf(x) = 8(x) for particles crossing x = 0(reflection + source)f(x) = c a= 1 — cfor absorptionwhile the collision density 4» is due to one incident particle.Choosing the contribution functions, according to the weighting functions, i.e., puttingf(P,P') = f(x') <strong>and</strong> f a(P') - f s(P',P") = 0, by means of the specific forms of the kernelsdiscussed in Appendix 5A, Equation (5.57) reduces toM,(x) = I(x) + ~ J dx'e- | x -*' ! M,(x') (5.61)where M 1(X) is the expected score due to a particle started isotropically (i.e., with equalprobabilities along the positive <strong>and</strong> negative x axis) at x, <strong>and</strong>I(x) = J dx'e- | X - X , | F(x')For the transmission <strong>and</strong> reflection contribution functions, I(x) = e ( x ~ x )<strong>and</strong> e~ x , respectively;hence, I"(x) = I(x) <strong>and</strong>. according to Appendix 5 A, the solution of Equation (5.61)isM 1(X) - Ac" + Be , vwherev = Vl ~ c (5.62)
LFT?<strong>and</strong> A <strong>and</strong> B follow from the boundary conditionsM 1(O) - Mj(O) == 1(0) - l'(0) (5.63)<strong>and</strong>M 1(X) + MUX) = I(X) + I'(X) (5.(4)Simple algebra shows that the final solutions areMf(X) = k[(l + v)e v * - (1 - v)e-""J (5.65)for transmission <strong>and</strong>M 1 P(X) = k[(l + v)c HX -*> - (I -- V)Sfor reflection, wherek = 2/[(l + V) 2 C* - (1 - v) 2 e~* x ] = [(1 + y 2 )shvX. + 2vchvX]1(5.67;Now the probability of transmission through the slab is the expected number of particlesleaving the slab due to a starter at x = 0. Thus, from Equation (5.65)t(X) = 2vk ' (5.68)while the reflection probability is the expected number of particles hitting x = 0 from apositive direction. This means that MWf(O) in Equation (5.66) is to be decreased by one,as the starter also crosses the surface x = 0, to obtain the reflection probability asr(X) = k[(l + v)e" x - ( 1 - V)C-"*]-' = kc • sbvX (5.69)For the estimation of the absorption rate, the contribution, function f(x) = 1 - c is to beinserted into the source term of Equation (5.61) to yieldI(x) = (1 - c)[2 - e"" - e- < x - x ) lNotice that if M(x) is the solution of Equation (5.61) with I(x) =absorption rate due to a starter at x is1, then, the expectedM 2 (x) = (1 - c)[2M(x) - M ( , r) (x) - Mf(x)| (5,70)(This follows from the fact that Equation (5.61) is linear in M 1<strong>and</strong> has a unique solution.)Now, from Appendix 5A again, the solution of the Equation (5.61) with l(x) =1 isM(x) = Ae" x + Be " + 1/(1 - c) (5,7!)where A <strong>and</strong> B are determined from the boundary conditions in Equations (5.63) <strong>and</strong> (5.64)The calculations will not be detailed here, but it is easy to see that after solving Equations(5.63) <strong>and</strong> (5.64) for the constants A <strong>and</strong> B in Equation (5,71) <strong>and</strong> inserting M(x) intoEquation (5.70), we obtain the expected absorption rate asMf(X) = 1 - Mf(x) - Mf(x) (5.72)
168 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationssurvival probabilityFIGURE 5.1. Comparison of transmission, reflection, <strong>and</strong> absorption probabilities calculated by Fermiscattering model <strong>and</strong> from exact theory. Optical thickness of the slab is X = 5.This result is not surprising as a particle that enters the slab will eventually disappear byeither escape (transmission or reflection) or absorption, i.e., the three probabilities add upto unity.Accordingly, by Equations (5.68), (5.69), <strong>and</strong> (5.72), the absorption rate due to a starterfrom x = 0 isR 11= 2ky(vshvX + chvX - 1) (5.73)The probabilities derived in the simplified model above are not expected to be valid formore realistic cases. Comparison to the corresponding values calculated from the exacttheory for transmission through a homogeneous slab shows 34that the transmission probabilitiesin the Fermi model are systematically lower than those resulting from the monoenergetictransport equation with isotropic scattering <strong>and</strong> incidence. The relation betweenthe reflection probabilities in the two models is opposite <strong>and</strong>, curious enough, the absorptionrates in the Fermi model approximate quite well the exact values, as is demonstrated inFigures 5.1 <strong>and</strong> 5.2.With arguments similar to those used in the calculations of the expected escape <strong>and</strong>absorption rates, Equation (5.59) for the second moments of the scores can also be solvedin the Fermi scattering approximation. This question will be reconsidered in a later stage ofthe discussion (cf. Chapter 7.1).
,R a0.9-0.8-0.7-0.6050.40.30.20.10.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.3survival probabi 11 tyFIGURE 5.2. Comparison of transmission, reflection, <strong>and</strong> absorption probabilities calculated by Fermiscattering model <strong>and</strong> from exact theory. Optical thickness of the slab is X =• 1.III. EXTENSION TO MULTIPLYING GAMESThe theory of <strong>Monte</strong> <strong>Carlo</strong> moment equations was first generalized to multiplyingprocesses by Booth 5 <strong>and</strong> independently by Sarkar <strong>and</strong> Prasad 41 for contribution probabilitiesof the form p n(P',W',s) [cf. Equation (5.28)] which do not depend on the postcollisior?coordinates <strong>and</strong> weights of the particles. In what follows, we take a more general approach,using probabilities that may depend on the characteristics of the particles that come out ota collision.From the point of view of the score moments, the main difference between the nonmultiplying<strong>and</strong> multiplying games is that while in the former a particle's history is a lineartree <strong>and</strong> therefore it is reasonable to speak about the score after a given number of collisionsof a particle, in the latter the history forms a branching tree <strong>and</strong> a particle may "lose itsidentity" in every collision. In our formalism, it means that the score probability •rr inEquation (5.29) will no longer be the sum of truncated probabilities as it was in Equation(5.42); rather, a balance equation concerning tt alone must be formulated. As a naturalconsequence, the resulting equation will be more complicated than in the nonmultiplyingcase.
170 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> CalculationsFor the sake of simplicity, we shall assume that the outcome of any collision is one ofthe following three events: (1) absorption [with a probability C 11(P')], (2) scattering [with aprobability c s(P'), or (3) multiplication [with a probability c,(P') = 1 - c a(P') - c s(P')].Thus, in accordance with the notations of Section 5.I.D, the collision kernel has the formC(P',F') = c„(P')8(P" - P) T 6 S(P')C S(P',P") + c t(P') 2 nq„(P')C„(P',P") (5.74)TL= 1where we recall that the score probability <strong>and</strong> the contribution functions vanish at P. Alternativeforms of the scattering kernel will be considered in Section E. The equations willagain be derived for a general nonanalog game which is played with the kernels f <strong>and</strong> C.The score probability equation <strong>and</strong> the moment equations are derived in Sections A <strong>and</strong>B, respectively. It is shown in Section C that almost any nonanalog multiplying game canbe replaced by an equivalent nonmultiplying game that results in an identical expected score.On the other h<strong>and</strong>, the widely used variance reduction procedure, called splitting, representsa special branch of the multiplying games (even if the physical process that is simulated isnonmultiplying), as is demonstrated in Section D.A. SCORE PROBABILITY EQUATIONLet -d(P',W',s)ds denote the probability that a particle entering a collision at P' with aweight W will yield (together with the particles it creates) a total score in ds about s. SinceTr(P, W,s) was defined as the same probability density due to a particle starting a flight, thetwo densities are related asTT(P,W,S) = JdP'f(P,P')p(P,P',W',s) * -&(P',W',s) (5.75)since the score due to the starter at P is the sum of the score in the first flight <strong>and</strong> of thescore resulting from the first collision <strong>and</strong> from the rest of the history. On the other h<strong>and</strong>,the score probability represented by -& is the sum of the probabilities associated with thepossible <strong>and</strong> mutually exclusive outcomes of the collision, i.e.,-STP',W',s) = c,(P')p,(P',W,s) + c,(P')JdP"C,(P',P")p»(P',P",W",s) * TT(P",W",S)+ C 1(P') S 4.(P') n * [dP'; ;)c„(P',p'
171be the probability of the contributions by the i-th particle from among the n secondaries thatemerge from the collision at the point P'^ with a weight W' n' (0. Then, by Equations (5.75)<strong>and</strong> (5,76), the score probability equation becomesTT(P,W,S) = JdPT(P,P')|c a(P')8[s - f(P,P',W) - f,(P\W")]+ c s(P'JdP''C s(P',P''MP',W'',s - f(P,P\W) - f s(P',F,W")I+ £ f(P') S q n(P') JdP^,,.. JdPT nJdS 1. -.J ds nfi C n(P',py^',,,W^s, - f n(P',P" ;),W; n' (i))jx S 1+ f(P,P',W) - s) j (5.77)Derivation of an equation that governs the moment of an arbitrary score function would bevery complicated <strong>and</strong> lengthy. In our further discussion, we shall only need the first <strong>and</strong>.second moments of the score; therefore, only the equations concerning these moments willbe explicitly given here.B. EXPECTATION AM) SECOND MOMENTDenoting again by M 1(P) the expected score due to a starter from P with a weight ofunity, an equation governing M 1is obtained by multiplying Equation (5.77) by s <strong>and</strong>integrating with respect to s asWM 1(P) = JdP'T(P,P')[W'f(P,P') +c a(P')W a f a(P')+ c s(P')j" dP"C s(P',P")W"f s(P',P")+ c f(P') 2 q n(P') S dP'^CJP'XYW^fiP'.PYJn=1 i= IJ+ JdP'T(P,P')[c,(P') JdP" C 5(P',P") WM 1(P")+ W ) 2 q„(P') i fdF^C^P'.F^W^MXF;,,)] (5.78)n = 1 i = 1 JIn the derivation, we have made use of the identities in Equations (5.52) through (5.55).Obviously, Equation (5.78) is similar in form to Equation (5.56), the equation concerninga nonmultiplying game, <strong>and</strong> setting C 1(P') = 0 (no multiplication), the two equations becomeidentical.Equation (5.78) becomes much simpler if the weights of the secondaries are all equal,i.e., if W^ 0= W". In this case, the integrals behind the summation with respect to i, that
172 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationsis, the terms describing the contributions by the different secondaries, do not depend on i.Correspondingly, the summations reduce to multiplications by n <strong>and</strong> Equation (5.78) becomesWM 1(P) = jdP'T(P,P')[W'f(P,P') + c a(P')W%(P')+ c s(P') JdP' C 5(P' ,P") Wf)(P' ,P")+ c f(P') E nq n(P') | dF'C n(P' ,F') WX(P' ,P")]+ JdP'T(P,P')[c 5(P') JdFC 5(P',F)WM 1(P")+ C f(P') E nq„P'|dP"C„(P',P")W;;M 1(P")] (5.79)N= 1 Jwhere W n' is the weight of a particle that emerges from a multiplying collision of n secondaries.For the analog game (where the statistical weight of the particle is not altered in thesimulation), the first moment Equation (5.78) reduces toM 1(P') = JdP'T(P,P')[f(P,P') +c a(P')f a(P')+ c S(P')JdP"C S(P',P")f s(P',P") +C F(P') E nq„(P')JdP"C n(P',P")f n(P',P")]+ J dP'T(P,P') JdF'C(F^F)M 1(F') (5.80)where C(P',F') is the total collision kernel in Equation (5.74).The second moment of the score due to a particle starting from P with a weight of unityis again denoted by M 2(P). It is obtained from Equations (5.75) through (5.77) after multiplicationby s 2<strong>and</strong> integration. From Equation (5.75), we haveW 2 M 2(P) = JdP 1 T(P 1PO[W 2 F(P,?') + 2W'f(P,P')N ](P',W) + N 2(P',W)]withN r(P',W) = Jdss r -&(P',W',s)Taking into account the identityS S 1) 2 = 2 (s, - a,) 2 + EE (Si ~ a,)(s k- a k) + (s, - a,)a,i^k+ 2 EE (S 1- a,)a k+ E a? + EE a,a ki k i i ki^k
173<strong>and</strong> assuming again that the secondaries in a collision emerge with equal weights, simplealgebra shows thatN 1(F 1W) = c,(P')Wf,(P') + c s(P')JdP'C s(P',F')W"ff i(P',P") + M 1(P")]+ cXP') S nq n(P') I ClFC n(P',P")W;;[f n(P',P") + M 1(P")]<strong>and</strong>N 2(P',W) = c,,(P')(W a ) 2 f:;(P') f c,(P"> J~dP"C s(P',F)(W") ; 'f s(P',F)]L(P' .F)+ 2M 1(F)] + c s(P') £ n4 1(P')|dP"C,,(P',p'';Kw;;)4 rxp',p'')[f n(P'.F')+ 2M 1(P")] + £ f(P') i n(n - l)q„(P')[j dP"C n(P',P") W^f 11(P',F)+ M 1(F)]V + JdFC(P',F)(W) 2 M 2(P")The details of the derivation are given in Appendix 5B. After a short algebraic manipulationthe second-moment equation can be rewritten asW 2 M 2(P) == |dP'T(P,P')c a(P')l'W'f(P,P') + Wf 1(P')] 2+ E [ r J JdP'f(P,P')c s(P')JdP'C s(P',F)|W'f(P,P')+ W"f s(P' ,F)] 2 - r (W")' M r(P")+ X ( 2 ) |dP'T(P,P')c,(P') X nq n(P')x { IdFC n(F,F)IWf(FF) + W;';f„(P',F)] 2 - r (W^) r M r(P") |.+ jdP'f(P,P')6 f(P') 2 n(n - I)C] n(P')x(JdP"c n(P',p")w;;[f n(P',p") + M 1(F)]IdP-T(P 1F)Cj(P') 2 (n - i)q„(P')(W') 2 f 2 (P,P'j (5.Hi!The equation concerning the analog game follows from Equation (5.81) by setting (he we.i^iequal to unity <strong>and</strong> will not be detailed here.( . AN EQUIVALENT NONMULTIPLYING GAMEIt is remarkable that the results of this chapter weequation for the simulated quantity. In other words, in M M > i ,. .'.',-n > > > -<strong>Carlo</strong> simulation of the particle transport processes, knf>w Hitransport equation is not required.The transport equation < O I K I Ut . ( . >t< u.i
174 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationscollision density (or flux) of the particles, while the <strong>Monte</strong> <strong>Carlo</strong> methods are able to simulatethe physical stochastic process which results in the given average value (expectation). Inthis sense, <strong>Monte</strong> <strong>Carlo</strong> methods give an essentially true description of the physical phenomenawhile the transport equation contains only reduced information about the processes.On the other h<strong>and</strong>, the quantity to be determined by <strong>Monte</strong> <strong>Carlo</strong> is related to the averagecollision density, i.e., to the solution of the transport equation (<strong>and</strong> not to the stochasticprocess that has this average). Therefore, one can forget about the physical background ofthe transport phenomena when modeling weighted integrals of the collision density. In fact,this is the case when using nonanalog <strong>Monte</strong> <strong>Carlo</strong> games <strong>and</strong> also will be done in thissection, where we propose a nonmultiplying game which, from the point of view of theresulting collision density, is equivalent to the multiplying game described in the previoussections.In the derivations above, every particle that may appear in the physical processes isindividually accounted for by using a multiplicative scattering kernel of the form in Equation(5.39). In contrast to that, in the integral transport equation formalism, Equation (5.4), thecollision densities at two successive collision points are connected by the transport kernelK(P",P) in Equation (5.6). Ignoring the physical reality, the collision density described bythe transport equation can be interpreted as some characteristic quantity (let us call it aweight) carried by some hypothetical migrating particle. The particle makes a free flightbetween the points P <strong>and</strong> P' with a probability density T(P,P') <strong>and</strong> suffers a scattering fromP' to P" according to the densityC(P',P") - C(P',P")/ dP"C(P',P")At every collision, the weight carried by the particle is changed by a factor equal to theexpected number of secondaries per collision in the physical process:c(P') =dP"C(P',P")Obviously, this interpretation of the transport equation yields a nonmultiplying analog simulationof the transport of the hypothetical particle, <strong>and</strong> the <strong>Monte</strong> <strong>Carlo</strong> game will give thesame expected score as the corresponding physical (multiplying) analog simulation (cf.Chapter 3.II).The equivalent analog game may have the advantage that no branching histories are tobe simulated, <strong>and</strong> a history consists very likely of fewer events (collisions) than the correspondingmultiplying history together with all its progenies. Therefore, the game offersthe possibility of reducing the computing time per history. (In fact, it is shown in Section5.V.F that it certainly reduces the computing time if the mean number of secondaries percollision in the multiplying game is greater than unity.) It will be seen in Section 5.VIII.Dthat in certain cases it also reduces the variance of the estimate in a history, thus having anet efficiency increasing effect. In most cases, the change of the variance <strong>and</strong> the computingtime per history are of opposite directions, <strong>and</strong> the efficiency of the game must usually beestimated by simplified models or numerical experiments (cf. Section 5. VIII.E).The heuristic arguments above are formulated more rigorously in what follows. Let usassume that the collision kernel in the multiplying ("physical") simulation is of the formin Equation (5.74). Let(5.82)
<strong>and</strong>C(P',P") =C(P',P")/c(P')Let us define the rionmultipiying game as above, i.e.. let C(P' V)<strong>and</strong> let the statistical weight of the particle be multiplied h\ ; - •that the contribution probability in a flight between rwo > >.!
176 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> CalculationsComparison of Equations (5.79) <strong>and</strong> (5.86) shows that the two equations are identical if thefollowing two conditions hold.1. The statistical weight of a particle emerging from a collision is independent of thenumber of secondaries in the collision <strong>and</strong> is the same in both the physical <strong>and</strong>hypothetical games. Denoting this weight by W", the condition is formulated asw: = w; = w (5.87)2. The contribution functions in the two games are related asJdP"C(P',P")W"f,(P',P") = c a(P')W a f a(P') + c s(P')|dP"C s(P',P'')W''f s(P',P'')+ 6 f(P') 2 nq„(P') fdP"C„(P',P")WT n(P',P") (5.88)H= I •>Condition 2 requires that the expected score contributed by a particle entering a collision atP be equal in the two games. We have thus proven the following.Theorem 5.3 — Under conditions 1 <strong>and</strong> 2 the hypothetical nonmultiplying game resultsin the same expected score as the (possibly multiplying) physical game.•For the sake of illustration let us consider a couple of cases when conditions 1 <strong>and</strong> 2are satisfied. Obviously, if the games are analog (with respect to the physical <strong>and</strong> hypotheticaltransport processes, respectively), then all the statistical weights are unity <strong>and</strong> Equation(5.87) is automatically met. The rules of generating the statistical weights in an unbiasednonanalog game will be derived in Section 5.V.B; nevertheless, it is heuristically obviouswithout any derivation that if in the nonanalog game only the transition kernel t is differentfrom the analog kernel, but the nonanalog <strong>and</strong> analog collision kernels are identical, thenthe statistical weights of the particles are not changed in a collision [except for the multiplicationby c(P') in the hypothetical game] <strong>and</strong> Equation (5.87) is again satisfied. Finally,if the nonanalog <strong>and</strong> analog kernels differ only in the mean number of secondaries percollision, i.e., if Equation (5.83) can be rewritten asC(P',F') = c(P')C,(P',P") =c(P')C(P',P")/c(P)then the postcollision weight is not affected by the type of the collision <strong>and</strong> condition 1holds. Note that in the three examples above, Equation (5.87) is satisfied in such a way thatthe pre- <strong>and</strong> postcollision weights are related asW" = W" = a(P')W' (5,89)with some function a(P') independent of the postcollision coordinates P". This relation holdsin most practical cases <strong>and</strong> if so, the postcollision coordinates P" are selected from the analogdensity, which also means that there is no need to change the statistical weight of the particleswhen they emerge from a collision. The rigorous proof of the reasoning above follows fromTheorem 5.8 in Section 5.V.B.The following examples demonstrate that condition 2 is also met in most practical cases.Let us first consider the case when the contribution functions f rdo not depend on the
177postcollision coordinates P". Then, if the relation (5.89) of the weights holds, condition 2obviously comes true with the choiceC(PX(P') = C 1 1(PX(P') + c\,(PX(P') + c f(P') 2 nqXXX)(ScAcStating it differently, if the original contribution functions do not depend on the pccoordinates of the particle, the expected score from a collision at P' can beanalytically <strong>and</strong> is equal to the RMS of Equation (5.90). Hence, the contribut. « « . -equivalent nonmultiplying game can also be determined from condition 2, <strong>and</strong> ». -equal to f,(P') in Equation (5.90). For another example, let us assume that the afunctions in a nonabsorbing collision in the physical game arc ail equal, indepennumber of secondaries, i.e., letf„(P',P") = f s(P',P"), n = 1,2,...Then Equation (5.88) holds ifc(P')f.(P',P") = C 1 1(PX(P') + Lc 4(P') + cX') Vn- 1nq n(P')]lX'.P")= cXX(P') + c(P')f s(P',P") (5.9!)Note that the most common estimators, such as the collision, absorption, track length, <strong>and</strong>expectation estimators (cf. Chapter 5.VI) conform with the assumptions above. Therefore,using any of the relations in Equations (5.90) or (5.91), it is possible to construct a nonmultiplyinggame equivalent to the multiplying (physical) simulation.Equivalence, as mentioned above, means equality of the expected ,i i igames. The variance of the games, however, in general will be different. T hi* *c, •< -of the score in the physical (multiplying) game is defined by Equation ''. "d u>n ihypothetical (nonmultiplying) game follows from Equation (5.85) after<strong>and</strong> integrating over s asW 2 X(P) = £ (^J JdP'T(P,P') JdP"C.(P'.P")tW'f(P,P')+ W" I)(P', P")] 2 " '• (W")' At 1(P")If the hypothetical game is unbiased, then, in view of Equations (5.82) i* . >(5.87), C.(P',P") <strong>and</strong> W" can be expressed by the original (multiplying; i,wsecond-moment equation becomesWXlP) = Zj (jf)JdP'T(P,P')JdFC(P'.P")iWf(P.P')+ 6(P')W"l(P',P")| 2 - Mc(P')!" ! (W")'1(P") (").92)The variance of the two games will be compared in Section 5.VlH.Fi.Note that the results derived so far in this chapter reduce to the results of the previouschapterif we put c, = 0. The hypothetical game then simplifies into the simplest nonanalog
178 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationsgame in which absorption is replaced by weight reduction (a game with survivalas was introduced in Chapter 3.11.biasing),I). SPLITTING: WHEN A NONMULTIPLYING GAME IS PLAYED AS AMULTIPLYING ONETheorem 5.3 can obviously be inverted <strong>and</strong> it is also true thai any nonmultiplying gamecan be replaced by (in principle, an arbitrary number of different) multiplying simulationprocedures that result in the same expected score. This theoretical possibility calls forth avery important practical realization called the splitting procedure. We have mentioned inChapter 3.11 that in certain cases, for variance reduction purposes, it is advantageous to splitthe particles with high statistical weights into a number of particles with lower weights. Thesplitting is to be performed in such a way that the final expected score accumulated by thesplit fragments is equal to the score expected from the original particle if no splitting isapplied. The fragments then are simulated separately, thus leading to a multiplying gameeven if the analog process is nonmultiplying. Splitting is also applied in deep-penetrationproblems in order to increase the number of simulation particles (fragments) that reach deeplayingregions.Splitting is expected to decrease the variance of the score simply because the total scoreis then added up from a greater number of essentially independent scores than in a gamewithout splitting. On the other h<strong>and</strong>, splitting will obviously increase the computing timeper history <strong>and</strong> therefore an optimum between variance reduction <strong>and</strong> increase in computingeffort is to be found in the practical applications. Chapter 7.11 will be devoted to this question.Basically, there are two practical ways of performing splitting. Either it is executedwhenever the particle crosses some given spatial surfaces (geometrical splitting) or it isplayed after every collision (collisionwise splitting)*. The score probability equations thataccount for the most general splitting procedure will be derived in Section 5.1V.C. Here weexamine a game which simulates a nonmultiplying physical process, but in which collisionwisesplitting is applied. Geometrical splitting is considered in Section 5.IV.B.Let Z 111(P", W") be the probability that a particle that leaves a collision at P" with a weightW" is split into m fragments after the collision. Naturally,2 z m(P",W") - 1 (5.93)in = 0Note that in the simplest form of the splitting procedure (as was introduced in Chapter 3.II,there are only two possible outcomes of the procedure: the number of split fragments is k= ent[W'7w sp(P")] with a probabilityz k(P",W") = k + 1 - W'7w sp(P")<strong>and</strong> it is k -I- 1 with a probabilityz k.,.,(P",W") = W'7w sp(P") -kwhere ent[-| denotes the integer part, w is some given weight value, <strong>and</strong> the split fragmentswill carry this weight. In this case, the number of fragments <strong>and</strong> thus the whole simulationdepend on the statistical weight of the particle to split.In other applications, the expected number of the split fragments is fixed <strong>and</strong>, if it isnot an integer, the two integer values around it are realized with appropriate probabilities.* Splitting is defined here in a broad sense. In practice, splitting is often weight dependent <strong>and</strong> no splitting isperformed if the statistical weight of a particle is below a given value. In a broad sense, this case correspondsto a one for one splitting.
179If in, denotes this expected number of fragments <strong>and</strong> m < p. < m +emerge from the splitting procedure with a probabilityI, then m particlesZjP') = m + 1 - u.<strong>and</strong> m +1 with a probability7-m+i( p ") = p. ^ mThe weights of the fragments may be equal either to W'7rn <strong>and</strong> W7(m + I) for the m-forone<strong>and</strong> m + 1-for-one splittings, respectively, or to W'7jx irrespective of the number offragments. In these cases, the simulation procedure is independent of the particle's weights.First, we examine the procedure in general with no assumption on the form of theprobabilities z m.Let W" |)mdenote the weight of the j-th fragment in a splitting of m secondaries. In thesimplest realization, W" j)m= W"/m; nevertheless, here we consider the more general situationwith arbitrary weights of the fragments. If the collision kernel of the game isC(P',P") = C 11(P')8(P" - P) +- c s(P')C 5(P',P") (5,94)then it is easy to see by the usual arguments that the score probability satisfies the equationTT(P,W,S) = JdP'f(P,P')|c a(P')8[s - Wf(P 5P') - W a f a(P')J+ JdP"C(P',P")z 0(P",W")8[s - W'f(P,P') - W"f s(P',P")]|+ |dP'T(P,P')jdP"C(P',P") V z m(P",W")m8[s - W'f(P,P') - W"f s(P',P")l* N * ir(P",W^)m ,s) ( 5 - 9 ¾J=IEquation (5.95) expresses the fact that when a collision Is played, the particle colliding fromP' to P" first contributes to the score by Wf(P',P") <strong>and</strong> only then is it split into a numberof fragments. At the same time, the equation also reflects the assumption that the splittingprocedure itself does not contribute to the score, as is usually the case. If, for some reason,a contribution is assigned to the event of splitting, its inclusion in the formalism is straightforward.The individual terms in Equation (5.95) have obvious meaning. The first term in braceson the RHS is the probability of the score if an absorption occurs <strong>and</strong> the second is the.score probability in a splitting with no outcoming particle (Russian roulette). The secondintegral on the RFfS gives the score probabilities of the different mutually exclusive rn foione splitting event.When taking the first moment of the score, we have to remember that the simulationprocedure may depend on the particle's weight <strong>and</strong> therefore the relation (5,5,5) betweenthe expected scores with arbitrary <strong>and</strong> unit weight starters does not necessarily hold. Thus,
180 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationsif M 1(P,W) denotes the expected score due to a particle that starts from P with a weight W,the expectation of Equation (5.95) gives the equationdssTf(P,W,s) =M,(P,W) = JdP'T(P,P')jc a(P')[W'f(P,P') + W a f a(P')]4- |dP"C(P',P")z 0(P".W")[W'f(P,P') + Wf)(P',P")]|dP"C(P'.P") E z nl(P",W")iW'f(P,P') 4- W"f s(P',P")["dP'f(P,P')jdP"C(P',P")|^ S z,.„(P",W") V M 1(PW 1)Jor, since according to Equation (5.93) the probabilities z,„ are normalized to unity:M 1(P(W) = jdP'T(P,P') jW'f(P.P') + c a(P')W't(P')idP"C(P',P")W"f,(P',P")|dP'f(p,p')|dP"c(p',p") E z m(P",w") X M,(P,w;' 1)m) (5.96)Now, subtracting Equation (5.56) [that describes the expected score M 1(P) in a game withoutsplitting j from Equation (5.96), the terms not containing second moments vanish <strong>and</strong> it isseen thatWM 1(P) = M 1(P 5W)if*2 z m(P",W") V W, m- W" (5.97)Equation (5.97) amounts to saying that the expected total weight of the split fragments mustbe equal to the initial weight of the particle before splitting. We have thus established theheuristicaily obvious result expressed in the following theorem.Theorem 5,4 — The game with collisionwise splitting results in the same expectedscore as the corresponding nonmultiplying game if the weights of the split fragments satisfythe conservation Equations (5.97) <strong>and</strong> (5.93).Note that in the most common applications, where W')' ))m= W'Vrn, Equation (5.97) is satisfiedautomatically.Notice that z„(P",W") is the probability that no particle leaves the splitting procedure,i.e., the probability of losing a Russian roulette. Sn the simplest form of the Russian roulette* in fact, the arguments above show that condition (5.97) is necessary for the equality of the respective moments.A rigorous proof of its sufficiency goes along the lines followed in Section 5.IV.B in connection with the proofof the unbiasedness of the geometrical splitting procedure.
181procedure, only the probabilities z„ <strong>and</strong> z, are different from zero, as was introduced inChapter 3.11. In this case, the weight of a particle that survives Russian roulette, accordingto Equation (5.97), is changed from W" to W",,, = WVz 1(P",W"). In the practical applications,the roulette is played if the weight of the particle is less than some threshold valueW 1 n(P"), <strong>and</strong> it is required that the survivor leave the roulette with a given weight w (P")w th(F'). This requirement fixes the probabilities asz,(P",W")W"/w sp(P") if W" ^W l h(F')ifW" > w, h(P")<strong>and</strong>Z 0(P". W") =1 - W"/w sp(P")0if W" < wjF')if W" > W 111(F')The second-moment equation will be derived in the special case when the splittingprobabilitiesdo not depend on the particles' weights, i.e., ifz ra(P",W") = Z 111(FOThen Equation (5.55) applies <strong>and</strong> if again M 2(P) denotes the second moment of the scoredue to a unit weight starter from P, then from Equation (5.95) <strong>and</strong> by .making use of Equation(B.9) in Appendix 5B, the second-moment equation readsW 2 M 2(P) = jdP'T(P,P')c tt(P')[W'f(P,P') + WT 11(P')] 2+ (dP'f(P,P')JdP"Cf'P',P")| [W'f(P,P') + WfYPVP")] 2+ 2[W'f(P,P') + W"f s(P',P")iW"M,{F)+ W'/M 2 (P") + W 2:[M 2(F') - M 2 (P")] (5.98)whereY W" = W"the total weight of the fragments in an m for one splitting <strong>and</strong>W'/ = E Z 1 n(F)(W,:) 2m - IW 2= E z, n(P") X (W 1',-,,,,) 2
182 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculations<strong>and</strong> we have made use of Equation (5.97). A little algebra yields an alternative form of theequation:W 2 M 2(P) = dP'T(P,P'H c a(P')[W'f(P,P') + Wf 1(P')] 22 |dP"C(P',P")tW'f(P,P') + W"f 5(P',P")] 2 r (W") r M r(P")ldP'T(P,P')JdP"C(P',P"){[W 2-(W") 2 ]M 2(P")+ (W 1' - W")M 2 (P")} (5.99)Comparing this equation to Equation (5.58) that describes the second moment of the scorein the original game with no splitting, it is apparent that the effect of the splitting on thevariance basically is determined by the last term in Equation (5.99).E. ALTERNATIVE FORMS OF THE COLLISION KERNELThe collision kernel in Equation (5.74) accounts for the possible physical processes:absorption, scattering, or multiplication.* Notice that multiplication may also yield a singleprogeny (with a probability q,), <strong>and</strong> in this case multiplication <strong>and</strong> scattering are not differentfrom a simulational point of view. The distinction between the two processes is justifiedwhen their contributions to the score, f s<strong>and</strong> fj, respectively, are different. On the otherh<strong>and</strong>, if f s= f,, the collision kernel can be used in a simpler form asC(P',F') = c a(P')8(P" - P) + [1 - c a(P')] y Hq n(P') C n(P',F) (5.100)where, by puttingC 1(P',?") = [£ S(P')C S(P',P") + 6XPOq 1(POC 1(P',F)/[£ S(P') +CXPOq 1(P')]<strong>and</strong>C] 1(P') = RBiP') + £ f(P') q,(P')Mc,(P') + c t
1.83In certain applications, the kernel of multiplying processes is given in the formC..(P',P") = V,(P')C„(P',P")instead of the summed form of Equation (5.39). This is tr.of secondaries per multiplication, v r(P'), <strong>and</strong> a common m-(r i , .are known, <strong>and</strong> also when the postcollision density C nG r ' < " i !depend on the number of progenies:C n(P',F) = C„(P',P"), n = 1,2, .,In general, v, is not an integer <strong>and</strong> the simulation of the rnuk denote the integer part of iyk =CRt[V 1(P')]Then k progenies will leave the collision at P' with a probabilityq k(P') = k + 1 - P 1-(P')<strong>and</strong> k -f1 secondaries are born with a probabilityq kM(P') = V 1-(P') -kThe postcollision coordinates of all the progenies are selected from C,,(P',P"). Obviously,the expected number of progenies in a multiplication at P' iskq k+ (k + l)q k M= v f(P')Setting all the other probabilities q„ equal to zero, the kernel of the above procedure read-;k+ 1C 1-(P',P") = 2 nq k(P')C v(P',P")n kIf the multiplication event contributes to the final score a value f„(P\P"), the form alasderived in this chapter remain valid by puttingf„(P',P") = f„(P',P"), n = k,k + 1IV. FURTHEE GENERALIZATIONSAlthough the majority of the practically applied sirnui «>• \ < * " m >the cases discussed in the previous Chapters, certain corn ut > < i it' i • i,mentioned in the previous Chapter. This procedure implie hr u< ,.
184 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> CalculationsBefore turning to more general games, a specific feature of the transition kernel isdiscussed.A. INTERRUPTION ANI) RESTART OF A FREE FLIGHTAccording to Equation (5.32), the transition kernel is expressed as' o-(P')exp| -J^ dtcXr + tw,E)|s(E - E')dE'dD'for P' = (r + D'to.E), D' 0f(P,P')dP'0 otherwise (5.101)It follows from this specific form of the kernel that it satisfies the following relation:T(P,P') 1dQT(P,Q)fdQTT(P,,P')for P 1= (r + I) 1W 1E), 0 =£ D 1=s D' (5.102)(5.102)wheredQdenotes that the integration is performed along the direction from P ••- (r,w,E) to P 1=(r + D 1OJ 1CO 1P:). Equation (5.102) has a definite physical meaning. It states that the probabilityof a collision after a free flight of length D' is equal to the probability that the particlereaches a point at a distance D 1from the starting point without suffering a collision <strong>and</strong>then continues its flight as if it were started from that point. This property of the transitionkernel is due to its exponential form, as has been discussed in Chapter 4.IV.Since Equation (5.102) holds for any point P 1between P <strong>and</strong> P', it implies a generalizedselection procedure of the next collision point. Let t(P,P,) be some given probability densityfunction defined along the half-line P 1= (r + D.to.E). D. 5 s 0, <strong>and</strong> let us define thefollowing selection procedure:1. Select a point Q from f(P,Q); Q = (r + Dto.Ei.2. Select a point P 1from t(P,P,); P 1= (r + D 1Oi 1E)3. If D 13 s D, then let the next collision point beP' =Q4. If D < D 1, then let P = P 1<strong>and</strong> return to step 1.The interpretation of the procedure is obvious: a flight from P to P' is started with a probabilityT(P,P')dP', but it is interrupted at P 1with a probability t(P,PJdP 1<strong>and</strong> restarted at P 1byselecting a new distance from T(P 11P). The unbiasedness of this altered selection procedureis proven in the following theorem.Theorem 5.5 — The procedure (steps 1 through 4) above is equivalent to the selectionof the next collision point from the density function t(P,P')
185Proof. Let 9~(P,P') be the probability density of the point P' selected in the procedure above<strong>and</strong> let1, if D 13s DX(P-Q) -0, if D 1< DIt is to be shown that ST(P,P') = T(P,P'). According to steps 1 through 4, the density ofP' satisfies the equation2T(P,P') = dQ UP 1T(P 1Q)I(P 1P 1)Ix(P 11Q)S(P' - Q) + x(Q,P,)^(P,,P')ldQ 4P 1U(P 5P 1) T(P,Q)8(P' - Q) dP, dQT(P.Q) t(P, P 1)SXPi, P')or, since the densities are normalized to unityJ(P 1P') dP, KP 1,PP 11 ))] T(P t( 1P')dP, L(P 1P 1)rdQ T(P 1Q) ST(P 1,P') (5.103)First we show that T(P 1P') satisfies Equation (5.103). Inserting T into the RHS of theequation <strong>and</strong> taking into account that T(P 11P') = 0 for such P' that do riot belong to thehalf-line from P 1along to,, the second term on the RHS of Equation (5.103) becomesdP, KP 1P 1)T(P 1P')where we have made use of Equation (5.102). The sum of the two terms givesJ(P 1P') =T(P 1P')i.e., T(P 1P') does indeed satisfy Equation (5.103). To conclude the proof, it remains toshow that Equation (5.103) has a unique solution. This, however, follows from the fact thatthe integral kerne!KP 1P 1)dQT(P,Q)in Equation (5.103) has a norm definitely less than unity [unless t(P,P,)Dirac delta function], since both t <strong>and</strong> T are everywhere positive <strong>and</strong>unity. Thus, the uniqueness of the solution is ensured by Theorem 5.1.We have thus established the identityT(P 1P') - J dP,t(P,P,) T(P 1P') dP, KP 1P 1) dQT(P.Q) T(P 11P')
186 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationsor, what is the same:f(P,P') CiP 1I(P 5P 1)1PdP,t(P,P,) I dQT(P,Q) T(P 1,P') (5.104)The selection procedure defined by steps 1 through 4 might seem unnecessarily complicated;however, it is just this procedure that makes geometrical splitting feasible. In the simplestgeometrical splitting procedure, the particles are to be split into a number of fragmentswhenever they cross some given geometrical surfaces (this is why the procedure is alsocalled surface splitting). In this simplest case, t(P,P,) is a Dirac delta function at the crossingpoint of the flight with the nearest splitting surface, <strong>and</strong> the above restart option makes itpossible to start the split fragments independently from the previous collision point <strong>and</strong> fromeach other. Moment equations describing score moments in a game with surface splittingwere first derived by Juzaitis 16<strong>and</strong> were used to optimize the location of the splitting surface<strong>and</strong> the number of fragments in monoenergetic isotropic transmission through infinite slabs.In the following section, a rigorous derivation of a general unbiased geometrical splittingprocedure is given with no restriction on the form of the density function 1(P 1P 1). Thisdensity will be called the splitting probability as it represents the probability that, in a flightstarted from P, splitting occurs in 6P 1about P 1.B. GEOMETRICAL SPLITTINGThe main difference between the collisionwise <strong>and</strong> geometrical splitting procedures isthat while in the former it is played at collision sites only, the latter may occur at any pointof the free flight <strong>and</strong> the probability of its occurrence is given by the density 1(P 5P 1), aquantity having no direct connection to the original simulation. Let us assume that if asplitting procedure is played at P 1, the probability that a particle of weight W suffers a k-for-one splitting is g k(P,,W) with2 g k(P,,W) = 1(5.105)Also assume that splitting itself has no contribution to the score. However, we shall allowthe contribution probability assigned to a free flight between the point of departure, P. <strong>and</strong>the site of splitting, P 1, to be different from that assigned to an ordinary intercollision freeflight. Let the probability that a flight from P to a splitting site P 1results in a score in dsabout s be p g(P,P,,W,s)ds for a particle of weight W. In the derivation below, deterministicscores will again be assumed, i.e.,p g(P,P,,W,s)::,8 [ s-. f g(P,P,)W]There is one more point to be discussed in greater detail in connection with geometricalsplitting. We have seen in Section 5.1.A that whenever the transition kernel used in thesimulation is different from the physical (analog) kernel, the statistical weight of the particleis to be altered according to the values of the analog <strong>and</strong> nonanalog transition kernels at thearguments determined by the actual flight. In a game with no geometrical splitting, it isirrelevant whether the weight is changed at the beginning or at the end of the flight. In thecase of geometrical splitting, however, the weight of the particle arriving at the site ofsplitting is to be fixed. Let us assume that the particle's weight is altered only when itreaches a collision point, i.e., that it enters the splitting procedure with its original weightW. Naturally, this means that the weights of the split fragments also must eventually accountfor the nonanalog transition of the original particle. Let W (1)kdenote the weight of the i-thfragment from a k-for-one splitting at the point P 1.
187As the splitting probabilities g kdepend on the statistical weight of the particle to besplit, relation (5.55) does not necessarily hold, i.e., it is not granted that a starter with aweight W will yield an expected score equal to W times the expected score due to a unitweight starter. Therefore, in establishing a score probability equation <strong>and</strong> also the conditionsof an unbiased splitting procedure, we have to proceed with a certain caution. Let us firstconsider the case when splitting may only be performed once during the first flight of thestarter. Let fr(P,W,s)ds denote the probability that the starter form P with a weight W yieldsa final score in ds about s if splitting is allowed in the first flight. Again let it(P,W,g)C!sdenote the same probability in a game without splitting, <strong>and</strong> let -d(P',W',s)ds be the probabilitythat a particle entering a collision at P' with a weight W will contribute to the finalscore in ds about s. Then fr satisfies the equationtt(P,W.s) = JdP'T(P,P')1 dP,t(P,P,)p(P,P',W',s) * »(P',W',s)^P 1I(P 5P 1)dQT(P,Q)P 8(P 1P 1,W,s)Ig 0(P 1 5W)O(S) + X g k(P,,W) II * IT(P 1,W, i ) k,s)II k = I i" I J(5.106)where, as before, the integration with no definite boundaries is extended from P to infinityalong the direction o>. The first term on the KlIS of Equation (5.106) represents the scoreprobability due to a free flight from P to P' without splitting followed by a collision at P',<strong>and</strong> the second term describes the probability of the score when splitting is played beforethe next collision. LetM,(P,W) =dsstr,the expected score due to the starter to split. Furthermore, letN 1(P') -dssd(P',l,s)the first moment of the score due to a particle of unit weight which is about to collide atP'. Then the expected score due to a particle starting from P with a weight W follows fromEquation (5.106) <strong>and</strong> from the expressions for the deterministic scores in Equation (5.46)<strong>and</strong> (5.48) asM 1(P 1W) ==jdP'T(P,P')1 - dP, 1(PjP 1)WlT(P 51P') +N 1(P')]IdP 1I(P,?,)1 dQ T(P 5Q)E g k(P. ,W)WL(P 5P 1)+ E G K(P„W) E W 1 1 1 1M 1(P 1)(5.107)If we denote byw=E G T(P.,W) E w (1(k(5, K)8)
188 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationsthe expected total weight of the fragments coming out of the splitting, the first-momentequation reduces toM,(P,W) = J dP'f(P,P')dP'T(P,P') 1 -- J dP^P.P,) W'[f(P,P') + N 1(P')dP, 1(P 1P 1) dQT(P,Q)[Wf (P,P,) + WM 1(P 1)] (5.109)where we have made use of the normalization in Equation (5.105). Any game with splittingmay only be useful if it results in the same expected score as the corresponding game withoutsplitting. According to Equation (5.75), the expected score in the game with no splittingsatisfies the equationWM 1(P) = J dP'T(P,P')W'|f(P,P') + N 1(P')] (5.110)Comparison of Equations (5.109) <strong>and</strong> (5.110) shows that the two expectations are equal ifdP.tffX,)) dQT(P 1Q)[Wf 11(P 1P 1) + WM 1(P 1)]dP'f(P,P')J dP.UPXJW'ItTP.P') + N 1(P')] = 0 (5.111)Now let us consider a particle that starts a flight from P 1with the weight W. Let W' denoteits weight after a free flight from P 1to P'. The expected score due to this particle satisfiesEquation (5.110) in the formWM(P 1) - dP'T(P,,P')W'[f(P,,P') + N 1(P')]Before substituting this equation into Equation (5.111), a number of identities are established.Notice that by interchanging the order of integrations with respect to P 1<strong>and</strong> P'<strong>and</strong> making use of Equation (5.104), the following relations hold:| dP^PX.J dQT(P,Q)[...] = J dP'T(P,P')| dP,t(P,P,)[...] (5.112)<strong>and</strong>ClP 1I(P 7P 1) f dQT(P,Q) [dPT(P,,P')[...]dP'J dP,t(P,P,) I dQT(P 5Q)T(P 11POf...!dP'T(P,P')pdP,t(P,P,)[...]dP.KP.P,) dPT(P,P')[...] (5.113)
189Inserting the equations above into Equation (5. ill), it is seen that the expected scores inthe two games (with <strong>and</strong> without splitting) are equal ifJ dP, UP 1P 1)J dP'T(P 1PO[WL(P 5P 1) + WT(P 11P') - Wf(P 1P')+ (W - W)N 1(P')] = 0for the arbitrary density function t(P,P,). This equation ensures an unbiased estimation ofthe expected score M 1(P) in a game where, at most, one splitting is played in the first flightLet us now consider a game where two splittings are allowed in the first flight. Then accordingto the arguments above, the particles that emerge from the first splitting will yield the sameexpected score independently of whether the second splitting is played if the equality aboveholds; that is, under this condition, the games with one <strong>and</strong> two splittings are equivalentfrom the point of view of the expected score <strong>and</strong> since the game with a single splitting isequivalent to the game without splitting, so is the game with two splittings. Recursiveapplication of the arguments above shows that introduction of an arbitrary number of splittingprocedures into the first flight leaves the expected score unchanged. Furthermore, since thesplit fragments are simulated independently <strong>and</strong> splitting has an effect on the future contributionsonly, any flight where a particle is split can be considered the "first flight". Theconclusions are summarized in the following theorem.Theorem 5.6 — A game with geometrical splitting results in the same expected scoreas the game which is played with identical kernels <strong>and</strong> contribution functions, but withoutsplitting, if the following conditions hold:1. The weights of the split fragments are such thatW = Wwhere W is the weight of a particle at P' that starts a flight at P with a weight W<strong>and</strong> enters its next collision at P' without suffering a splitting.2. The contribution assigned to the flight from the starting point P to the splitting site P 1isWf g(P,P,) = J dP'T(P,P')W'[f(P,P')- f(P,,P')]/j dP'T(P,P')= IdP 1 T(P 1 5POW[IfP 1P') - f(P,,P')] (5.1145nCondition 1 formally means that if a particle starts from P <strong>and</strong> is split into a number offragments <strong>and</strong> the fragments all collide at P', then the total expected weight of the fragmentsat P' must be equal to the weight of the original particle when it enters a collision at P''without splitting. In order to make condition 1 less abstract, let us recall the introduction,of statistical weights in Chapter 5.I.D. It was stated that in the majority of practical cases,the bias due to the selection of a free flight from a nonanaiog transition kernel is compensatedfor by multiplying the statistical weight of the particle by some weight factor w(P,P') in .;
190 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationsflight from P to P'. [In fact, it was mentioned in Chapter 3 <strong>and</strong> also will be seen in Section5. V.B. that the simplest choice of w(P,P') is the ratio of the nonanalog <strong>and</strong> analog transitionkernels at the argument (P,P').J Making use of this rule, the weight in the game withoutsplitting is changed asW= W- w(P,P')Similarly, in the game with splittingW' = W • w(P,,P')Thus, in view of Equation (5.108), condition 1 reads1. - ~kW(P,P')W = W(P 11P') 2 &(PnW) 2 W ( o kk= 1 i= 1Condition 2 amounts to saying that the expected contribution due to an intercollisionflight must not be influenced by a possible splitting.Note that the theorem has an important practical consequence. Recall that the statisticalweight of a particle is changed in a free flight because the transition kernel T. which is usedto select the length of the free flight, is different from the analog kernel. Let us realize thatcondition 1 leaves some freedom in choosing the postsplitting weights since the conditionconcerns the total weight of the split fragments at the next collision, while this weight isdetermined by the weights of the fragments after the splitting <strong>and</strong> by their change due tothe reselection of the free flight at the site of splitting. In practical realizations of theprocedure, this uncertainty must be excluded. Now it is physically reasonable to fix therules according to the following scheme.1. The starter is at P <strong>and</strong> its weight is W. LetP 0= P, W 0= W2. Select a point Q from f(P 0,Q): Q = (r c+ Dto.E).3. Select a point P 1from t(P 0,P,): P 1= (r c+ D,co,E).4. If D 15- D, then let the next collision point of the particle be P' - Q <strong>and</strong> let its weight<strong>and</strong> contribution be determined as in a game without splitting for a free flight from Pto P', i.e., they will be W 0<strong>and</strong> W' 0f(P,P'), respectively.5. If D 1< D, then split the particle into k fragments with a probability g k(Pi,W 0).6- If k = 0, let the contribution be W 0f g(P,P,) as defined by Equation (5.114) <strong>and</strong> startto process a new particle.7. If k > 0, let the weight of the i-th fragment be W (1)ksuch thatk2 Bk(P 1-W 1,) I W (]>k= W 0k= 1 i= 1Take the fragments one after another. For the i-th fragment, set P H= P 1<strong>and</strong> W n=<strong>and</strong> repeat steps 2 through 6 until every fragment reaches a collision point or is eliminatedfrom the system.W (1)k
191It is easy to see that the procedure above grants the fulfilment of the conditions of Theorem5.6.Geometrical splitting, like most of the tricks in <strong>Monte</strong> <strong>Carlo</strong> methods, ireducing the variance of the score. This can be investigated on the basismoment equation. However, it is not easy to establish, in general, a second-ir«». > i.» >>similar in form to that concerning a game without splitting because thedepend on the weight of the particles. By arguments like those leading to Etit is easy to show that the score probability TT(P,W,S) for a game with geonsatisfies the equation-rr(P,W,s) ==|dP'T(P,P')dP (t(P,P 1)]p(P,P',W',s) * d(P'.W',s)IdP 1I(P 1P 1)I dQT(P,Q) PiP 1P 1 1W 1S)* Jg 11(P 11W)S(S) + E g k(P,,W) JpTT(P 1 1W^ 1S) (5.115)Let us consider a game in which the splitting probabilities do not depend on the particle''sweight, i.e.,g k(P„W) =g k(P,)Inserting these probabilities into Equation (5.115), multiplying the equation by s 2 , <strong>and</strong>integrating over s, the equation for the unit weight second moment M 2(P) follows as below(details of the derivation are given in Appendix 5B):W 2 M 2(P) = dP'T(P 1P') 1 dP, 1(P 1P 1) (W') 2 [P(P 1P')2f(P,P')N,(P') +N 2(P')]dP, 1(P 1P 1) 'dQT(P-Q)] {W 2 P 2 XP 1P 1(5.11.6)+ 2WWP(P 1P 1)M 1(P 1) + W 1MKP 1) + W 2[M 2(P 1) - Mf(P 1)]}where W is the expected total weight of the split fragments as defined in Equation (.5.108),while<strong>and</strong>W, = E &(P.) E Wf 111We recall that in the procedure discussed in this section, the functions 1(P 1P 1) <strong>and</strong> g k(P,W)<strong>and</strong> the split weights W (i)kare independent of both the kernels <strong>and</strong> the contribution functionsof the simulation. This means that even if the nonanalog kernels <strong>and</strong> contributions are fixed,for some reason the functions <strong>and</strong> weights above can be chosen almost arbitrarily <strong>and</strong> their
192 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationsproper choice may help the optimization of the game. On the other h<strong>and</strong>, an erroneouschoice not only decreases the efficiency, but, in extreme cases, can also make the simulationunfeasible.To conclude this section, let us consider the special case of surface splitting. LetL(P 5P 1) - S(P 1- P*)where the splitting surface nearest to P along no is situated at P* = (r + D*co,E). ThenEquation (5.115) reduces toW 2 M 2(P) -- dP'T(P,P')(W') 2 [P(P,P') + 2f(P,P')N,(P') + N 2(P')]dP'T(P.P') {W 2 R(P 5P*) + 2WWf g(P,P*)M,(P*)W,M 2 (P*) + W 2[M 2(P*) - M 2 (P*)]} (5.117)Equation (5.117) reflects the interesting fact that the second moment of the score is notnecessarily a continuous function of its coordinates. Indeed, letting P tend to P*, fromEquation (5.117) we haveHmW 2 M 2(P') -- W 2 M 2 CP*) + W 2[M 2(P*) -Mj(P*)]+ lira [W 2 R(P 5P*) + 2WWf 8(P 5P*)M 1(P*)] (5.118)p-»p*Obviously, the discontinuity is due to the stepwise change of the number of particles at thesurface.Finally, we note that in most practical cases, geometrical splitting is played in one ofthe three ways discussed in connection with collisionwise splitting in Section 5.III.D. eithera threshold weight is given above which the particle is split into a number of fragments,each leaving with this weight (weight-dependent simulation), or the expected number ofsplit fragments is fixed irrespective of the weight to be split. Obviously,the second-momentEquations (5.116) <strong>and</strong> 5.117) concern only the latter procedure.C SCORE PROBABILITY IN A GENERAL TIME-INDEPENDENT GAMECombining the results of the present <strong>and</strong> previous Sections, the score probability equationof a very general time-independent <strong>Monte</strong> <strong>Carlo</strong> simulation is obtained. We consider anonanalog multiplying game where both collisionwise <strong>and</strong> geometrical splitting are applied.Again let TT(P,W,S) be the score probability density assigned to a particle that starts its flightat P with a weight W. I .el •Q(P',W',s) <strong>and</strong> TJ(P",W",S) be the score probability densities dueto a particle entering a collision at P' with a weight W' <strong>and</strong> leaving a collision at P" withW", respectively. We have seen in the previous section that rr is expressed by ft <strong>and</strong> byitself according to Equation (5.115):Tr(P 1W,s) = JdP'T(P 5P') J dP 1t(P,P 1)p(P,P',W',s) * f)(P',W',s)+ JdP 1KP 1P 1) J dQT(P 5Q)p g(P,P,,W,s)* S g k(P,W) Id*Tr(P 1 5W ( 1 ) k,s) (5.119)k=0 i=0
193where we use the notational conventionTr(P,W (0)k)s) = 5(s) (5 J 20)The connection between •d <strong>and</strong> -n is due to the collision process <strong>and</strong> it follows from Equation(5.76) in Section 5.III.A ast1(P',W',s) = c a(P')p a(P',W a ,s) +c s(P')|dP"C s(P',P")p s(P',P",W",s)* T](P'\N",S) + c f(P') E 4,(P') H * JdP",,C n(P',P",))p n(P',P^15 W(J) 1S)* T 1(P 1^1W(V 1S) (5.1.21)Finally, TJ <strong>and</strong> -ft are interdependent due to collisionwise splitting according to Equation•(5.95) in Section 5.III.D asTS(P",W",S) = X z m(P",W") N*ir(P",W' 0). m)s) (5.122)m = 0J = Owhere again the convention of Equation (5.120) is valid.Equations (5.119) through (5.122) describe the score probability in a general <strong>Monte</strong><strong>Carlo</strong> game. Their moments can be obtained according to the procedures followed in theprevious chapters. Here we leave the description of the general game since all its relevantinstances have already been discussed. On the other h<strong>and</strong>, the system [(5.119) through(5.122)] as a whole is mainly of theoretical interest since, in practical cases, one or anotherspecific trick is to be investigated at a time <strong>and</strong> very seldom a general procedure.I). INCLUSION OF TIME DEPENDENCEWe have so far limited our discussion to problems where time dependence plays no roleeither because the quantity of interest is the cumulative effect of a certain amount of particlesor because the distribution of particles is assumed to be constant in time <strong>and</strong> the estimatedquantity is some reaction rate per unit time. In the sequel, we refer to such problems asstationary.On the other h<strong>and</strong>, simulation of particle transport inherently involves modeling ofevents at successive times <strong>and</strong> therefore estimation of time-dependent quantities is not incontrast to the very nature of <strong>Monte</strong> <strong>Carlo</strong> methods.Time-dependent problems may be classified into two main types. In the first type ofcalculation, evolution of a certain quantity, e.g., reaction rate in or escape rate from a givenregion, is investigated as a function of the time elapsed since the start of the particle's batch.The second type of time-dependent estimation concerns the investigation of the variation ofsome quantity due to the change in time of some characteristic function [e.g., the weightingfunction in the RHS of Equation (5.2) or the kernels that govern the transport]. <strong>Monte</strong> <strong>Carlo</strong>simulation of the second type of time dependence is only occasional (e.g., for investigationof reactivity change due to the moving components of a nuclear reactor) <strong>and</strong> will not bediscussed here.Moment equation accounting for evolutional-type time dependence were first derivedby Booth <strong>and</strong> Cashwell 4 <strong>and</strong> by Booth 5 for multiplying nonanalog games with geometricalsplitting. To illustrate the method to be used when deriving time-dependent moment equations,we consider a nonanalog nonmultiplying game. Extension to more complicated cases(with multiplication or splitting) goes along the lines of the previous Chapters.
194 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: '<strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> CalculationsLet ir(P,W,s,t)ds be the probability that a particle at P = (r,E) with a weight W willcontribute to the final score in ds about s during a time t. LetP 1= (r + vt,E)where v = v • o>, v being the speed of the particle. In contrast to the stationary case, theparticle will not necessarily enter a collision during the time t <strong>and</strong> therefore three possibleevents may follow the start of a free flight in a nonmultiplying game:1. The particle is flying without any collision all the time t. The probability of this eventdP'T(P,P')2. The particle enters a collision at a time t' < t <strong>and</strong> it is there absorbed. The probabilityof this is6 a(p;)f(p,p;)dp;with P; = (r + vt'.E).3. The particle suffers a scattering at a time t' < t <strong>and</strong> emerges from the scattering indP" about P". The corresponding probability isf(p,p;)dp;c(p;,p")dP"where P" = (r +vt',E')Accordingly, the score probability equation readsTf(P,W,5,t) T(P.P') p,(P,P t,W,s)+ I dp;f(p,p;)6 a(p;)p(p,p;,w,s) *P a(p;,w%s)+ j dp;f(p,p;)|dP"c(p;,p")p(P,p;,w,s)* p s(P;,P",W",s) *
195<strong>and</strong> assuming again deterministic scores [cf. Equations (5.46) through (5.48) <strong>and</strong> (5.51)through (5.53)], the first-moment satisfies the equationWM 1(Pd)(5.1.24)The interested reader may repeat the derivation for multiplying games with splitting <strong>and</strong>will find that the resulting equations are similar in form to those derived for stationary games.The main difference between them is that in the time-dependent case, integrals from P toP 1replace the integrals from P to infinity in the stationary equations. This difference, however,is in a sense essential; namely, a stationary equation has a unique bounded solution only ifthe kernels satisfy the conditions of Theorem 5.1 in Section 5.1.B. On the other h<strong>and</strong>, atime-dependent equation may have a bounded solution for every finite t even if the conditionsof Theorem 5.1 are violated. The reason for this difference is obvious. The stationary solutionobeys an integral equation in which the integration is extended over the entire phase space<strong>and</strong> therefore the norm of the integral kernel is also connected to all possible values of thekernel. On the other h<strong>and</strong>, time-dependent integral equations concern only the region of thephase space that can be reached by a particle during a finite time t <strong>and</strong> therefore the existenceof the solution depends only on the value of the integral kernel inside this region. Inmathematical terms, this difference is analogous to the difference between the Fredholm<strong>and</strong> Volterra-type integral equations of the second kind. In terms of reactor physics, thismeans that stationary moment equations concern only subcritical systems with sources; thetime-dependent description, on the other h<strong>and</strong>, may also follow the evolution in time ofsupercritical systems. (As will be seen in Chapter 6.Ill, critical systems are also treated astime independent, but a method different from the stationary solution is used.) We will notdiscuss time dependence more thoroughly. The techniques to be used in specific problemsare analogous to those used in the previous derivations.To illustrate the difference between the stationary <strong>and</strong> time-dependent treatments, let usconsider a monoenergetic analog game played in an infinite homogeneous medium. Let thequantity to be estimated be the number of particles absorbed during a time t. In such a game,the expected score depends on t, but is obviously independent of the starting point P of theparticles. If the total cross section of the medium <strong>and</strong> the speed of the particles are takenas unity, then the transition kernel in Equation (5.32) has a simple exponential form withthe time in its argument, <strong>and</strong> the first-moment equation (5.124) becomeswhere
196 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationsthe mean number of secondaries per collision. The solution of this equation is easily obtainedascjl - e-"- c ) , ]/(l - c) if c < 1c,t if c = l(5.125)The stationary expected absorption rate follows from the solution Equation (5.125) by lettingt tend to infinity, <strong>and</strong> it is seen that the solution tends to a finite value with increasing timeif c < 1, but it is unbounded at c = 1. This is in accordance with Theorem 5.1 since theconditions of the Theorem are met only if c < 1. Finally, we note that in view of the resultsin Section 5.1I1.C, the solution for c < 1 in Equation (5.125) also defines the expectedabsorption rate for c > 1.V. ANALYSIS OF THE FIRST-MOMENT EQUATIONWe have established the moment equations that describe the expectation of variouspowers of the total score. There remains, however, a number of open questions. First, it isto be clarified what kind of contribution functions result in estimates of the required reactionrate, Equation (5.2). Second, it is not yet clear how to choose the statistical weight of aparticle in order to keep a nonanalog game unbiased, i.e., in order to ensure that a nonanaloggame does result in the same expected score as the analog game it corresponds to. Thesequestions will be answered in Sections A <strong>and</strong> B of this chapter. We consider here the firstmomentequation of such multiplying analog <strong>and</strong> nonanalog games in which the secondariesof a multiplying event are indistinguishable. The considerations below can be easily generalizedto the case of distinguishable secondaries. We remind the reader that the statisticalweights of the split fragments in a game with splitting are essentially arbitrary (except forthe conservation rules in Theorems 5.4 <strong>and</strong> 5.6) <strong>and</strong> they do not follow from the requirementof unbiasedness. Selection of the split weights will be investigated in Section 5.VIILI.For easy reference, let us recall the first-moment equation for a multiplying game. Theequation concerning an analog game is given in Equation (5.80) asM 1(P) = I 1(P) + JdP'T(P,P')JdP"C(P',P")M 1(P") (5.126)whereI 1(P) = JdP'T(P 1P') [f(P,P') +C 8(PX(P')+ C 5(P') JdP" C 8(P' ,P") f s(P' ,P")+ c f(P') 2 nq n(P')JdP"C n(P',P")f n(P',P")j (5.127)<strong>and</strong>C(P',F') - c s(P')C s(P',P") + C 1(P') i nq„(P')C„(P',P") (5.128)
197[Note that we have omitted the absorption term c a(P')8(P' — P), which leads out of thesimulation <strong>and</strong> plays no role in Equation (5.127)]. The nonanalog first-moment equation.,from Equation (5.79), isM 1(P) = I 1(P) + dP'T(P,P') dF'C(P',P")M,(F') (5,129)withI(P) = dP'T(P,P') W - W a .— f(P,P') + — fiP')W W "W" -a s(P')|dP"c s(P',p")^f s(P',P")<strong>and</strong>c f(P') 2 nq„(P') I dP"C„(P',P") f„(P',P") (5.130)W" °° , w"C(P',P") = c,(P')C„(P',P") — + off') 2 nq n(P')C n(P',P") (5.131)A. UNBIASED ESTIMATORSIt has been seen in Chapter 5.1 that starting the particles from the real physical sourcedensity in an analog game, the expected score due to a particle that departs from point Psatisfies the equationM 1(P) = I(P) + dP'T(P,P') ,P')/c dP"C(P',P")M,(P")(5.132)withI(P) =jdP'T(P,P')f(P')(5.133)where f(P) is the weighting function in the reaction rate integralR =dPi[i(P)f(P)to be estimated. It was also seen in Section 5.1.A that Equation (5.132) determines theexpected score in such a game, where a history consisting of the collision points PJ,,P 2,...,P nyields a total score ofM-(P) = E f(?DIn Section 5.1.1) <strong>and</strong> subsequent chapters, we have constructed a general <strong>Monte</strong> <strong>Carlo</strong>simulation in which every event that happens to a particle may contribute to the total scoreThe first moment of the score in a general analog game Is given in Equations (5,126) <strong>and</strong>(5.127). Comparing these equations to Equations (5.132) <strong>and</strong> (5.133), it is apparent that inthe simplest game, the contribution functions (or estimators) are defined asf(P,P') = f(P'); f a(P') = f s(P',P") = f„(P',P") = 0
198 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationsor, alternatively,f(P,P') = 0; f a(P') = f s(P',P") = f n(P',P") = f(P')It is heuristically obvious that there may exist several other estimators that result in the sameexpected score in a given game. A wide class of such estimators is defined in the followingtheorem.Theorem 5.7 — All contribution functions (estimators) that satisfy the relationI 1(P) = I(P) (5.134)yield an unbiased estimation of the expected score, where I 1(P) <strong>and</strong> I(P) are given in Equations(5.127) <strong>and</strong> (5.133), respectively.Proof. It follows from the uniqueness of the solution of Equation (5.132) (cf. Theorem 5.1)that if the source terms of Equations (5.126) <strong>and</strong> (5.132) are equal, then so are the solutionsto them.•The sets of estimators {f,f a,f s,f,,... ,f n,...} that satisfy Equation (5.134) are called partiallyunbiased estimators 26 . The name follows from the fact that the condition in Equation (5.134)ensures an unbiased estimation of not only the total score, but also the score due to anyevent pair consisting of a free flight <strong>and</strong> a collision, i.e., partial expected scores of a historyare also preserved by these estimators. Indeed, I 1(P) is just the expected partial score dueto a free flight <strong>and</strong> a collision in a general game <strong>and</strong> I(P) is the same in the simplestsimulation. The theory of partially unbiased estimators will be developed in Chapter 5.VI.Scoring in a general analog game goes as follows. Every time a free flight is simulatedfrom a point P kto P 1, the score of a history started from P 0is increased asLi(P 0) := .X(P 0) + f(P k,P k) (5.135)If the flight is followed by an absorption, scattering, or multiplication, the score is changedtoLi(P 0) := Lt(P 0) + UPi) (5.136)Li(P 0) := (X(P 0) + f s(P k,P k + 1) (5.137)orLt(P 0) := Li(P 0) + E f n(P kA + Io>) (5.138)i= 1respectively. The total score due to a starter is the sum of the contributions from all theprogenies in the simulation.Similarly, scoring in a nonanalog game is performed by accumulating the nonanalogcontributions weighted by the actual statistical weights of the particles [cf. Equation (5.51)].Thus, f in Equation (5.135) is replaced by Wf, <strong>and</strong> Wf a, Wf 5, <strong>and</strong> W n(1)f„ st<strong>and</strong> for f a, f s,<strong>and</strong> f„, respectively, in Equations (5.136) through (5.138). Proper determination of theweights <strong>and</strong> nonanalog contribution functions is discussed in the next Section.
The contribution functions f(P,P') are usually called track length-ty < ., .most commonly used such estimator is proportional to the optical track 1« • «(h .. i , .between two successive collision points (cf. Chapter 4. V). f s(P',P"), anecollision-type estimators, for obvious reasons (cf. Chapter 4.Y). In the >applications, they do not depend on the postcollision coordinates P". f.,ithe absorption or last-event estimator which scores at the collisions thatIf the contribution function assigned to a free flight depends only ( i*P, i.e.,f(P,P') ^f(P)then it is called an expectation-type or next-event estimator because the cothe flight does not depend on the actual length of the free flight <strong>and</strong> henceexpectation over the next collision points (cf. Chapter 3.II), Obviously, tpectation-type partially unbiased estimator is the source term I(P) of EquatioEquation (5.134) becomes especially simple in special cases. If, for ex;nonvanishing estimator is the track length-type estimator, then it. is partial!;JdP'T(P,P')f(P,P') = JdP'T(P,P')f(P')On the other h<strong>and</strong>, if collisions also contribute to the score but their contributions areindependent of the postcollision coordinates <strong>and</strong> of the number of secondaries emergingfrom the collision, i.e., iff s(P',P") = f„(P',P") = f c(P')then Equation (5.134) reduces to|dP'T(P,P')[f(P,P') + c a(P')f a(P') + c(P')f c(P')] = [dP'T(P,P')f(P')where c(P') is the mean number of secondaries per collision at P' as defined in Equation(5.19).In the derivations of this chapter, we have assumed that the contributions to tbfrom various events in a history depend only on the coordinates characteristic to the e , i «<strong>and</strong> are independent of the sequence number of the collision point in the history tothey are related. In other words, we assume that identical events give identical contrilirrespective of the stage of the simulation at which they occur. It is this assumptimakes it possible to construct integral equations for the score moments, <strong>and</strong> on!estimators belong to the class of the partially unbiased estimators. Although in the ITof the practical cases partially unbiased estimators are applied, it is obvious that theyexhaust all the possible unbiased estimators. In fact, it is possible to define a wide cunbiased estimators, the forms of which explicitly depend on the sequence numberactual collision point in the history. Such estimators are treated in full generaKhisamutdinov 19<strong>and</strong> also by Mikhailov." Certain special forms of such estimators ztreated in Reference 40. As these special estimators have limited application in usual<strong>Carlo</strong> problems, they will not be detailed here. A special application of such estim;demonstrated in Section 5.IX.A.B. WEIGHT GENERATION RULESThe second important open question of a general <strong>Monte</strong> <strong>Carlo</strong> simulation is how to
200 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationschoose the statistical weights of a particle in a nonanalog game in order to obtain an unbiasedestimate of the quantity of interest. In other words, we seek the weight values W', W'', W",<strong>and</strong> W nappearing in the nonanalog first-moment equations [(5.119) through (5.121)] thatensure the equality of the nonanalog <strong>and</strong> analog expected scoresM 1(P) = M 1(P) (5.139)Now, it follows from the uniqueness of the solution of Equation (5.126) (cf. Theorem 5.1)that Equation (5.139) holds if the integral kernels <strong>and</strong> the source terms of the analog <strong>and</strong>nonanalog first-moment equations are identical, i.e., if, with the notation in Equations (5.130)<strong>and</strong> (5.131),T(P,P') C(P',F) = T(P,P')C(P',P") (5.140)<strong>and</strong>I 1(P) = I 1(P) (5.141)Theorem 5.8 — Equalities (5.140) <strong>and</strong> (5.141) hold <strong>and</strong>, thus, a nonanalog historystarted from P with a weight W results in the same expected score as the correspondinganalog history with the same starter1. if the statistical weights of the particle are changed in the various events according to thefollowing rules:W = w(P,P')W (5.142)w(P,P') = T(P,P')/f(P,P') (5.143)in a free flight from P to P' when the weight at P is W.W- = w.(P')W' (5.144)w a(P') = C 5(P 1 Vc 1(P') (5.145)in an absorption at P'.W" = w s(P',P")W' (5.146)w s(P',P") =[c s(P')/c a(P')][C s(P',P"))/C s(P',P")]= w s(P')w c(P',P") (5.147)in a scattering from P' to P" whereW 5(P') = c,(P')/c s(P')W c(P',P") = c s(P',P")/C s(P',P")W'„' = w„(P',P") W' (5.148)w„(P',P") =[C 1(POq 0(POZeXPOi(PO][C n(POFVC 0(P',?'')]= W 1n(P') w cn(P',P") (5.149)
201in an n-fold multiplication from P' to P" where the weight factor in Equation (5.149) wassplit up asw,„(P') =wJP'.P") =c,(P')q n(P')/£ f(P')q n(P')C n(P',FyC n(PVP")<strong>and</strong>2. if the nonanalog <strong>and</strong> analog contribution functions (estimators) are related as|dP'T(P,P')|f(P,P') - f(P,P') + c a(P')[f,(P') - f a(P')j+ c s(P')jdP"C 5(PVF)K(PVF) - f s(P',F)]+ c f(P') E nq„(P')JdFC n(PVF)[f n(P',P") - f„(P',P")]} - 0Proof. Simple substitution of Equations (5.142) through (5.149) into Equations (5.12?)through (5.131) shows that the equality (5.140) is satisfied, while condition 2 is just thedetailed form of Equation (5.141) after substitution of the weights. Thus, the conditionsabove imply Equations (5.140) <strong>and</strong> (5.141) as was to be shown.LlEquations (5.142) through (5.149) will be called the weight generation rules of a nonanaloggame. The rules have an obvious interpretation. In a nonanalog game, the coordinatesof an event are selected from a probability density different from the analog (physical) one.The weight of the particle participating in the event, however, is multiplied by the ratio ofthe analog <strong>and</strong> nonanalog probability densities, i.e., if the probability of an event in theanalog game is lower than in the nonanalog, only a "fraction" of an analog particle takespart in the event of increased probability <strong>and</strong> vice versa. Equation (5.140) expresses the factthat the effective number of particles undergoing various events in a collision that followsa free flight is the same in both games.It is to be emphasized that the weight generation rules of the theorem represent sufficientbut not necessary conditions of the fulfilment of Equation (5.140), In some applications,e.g., the multiplying part of the collision kernels in the nonanalog <strong>and</strong> analog games cannotbe related as in Equations (5.148) <strong>and</strong> (5.149) because the possible number of secondariesare different in the two games. In such cases, the weight generation rules in Equations(5.148) <strong>and</strong> (5.149) can be replaced by the implicit relationW" °° , w"C 1(PVCfPVF)^ 7 7+ C 1(P') 2 nq„(P')C n(PVP")W n- 1 VV= c,(P')C 8(PVP") + C 1(P') 2 Hq n(PVC n(PVF) (5,150)n= iEquation (5.150) follows from Equation (5.140) by making use of conditions (5.142) ana(5.143) to obtain— C(PVP") -= C(PVF)
202 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> CalculationsSubstituting the explicit forms of the kernels given in Equations (5.131) <strong>and</strong> (5.128). weobtain Equation (5.150). Similarly, in the case of the equivalent nonmultiplying game definedin Section 5.III.C, the rules above do not apply; nevertheless, Equation (5.140) holds underthe alternative conditions of Equations (5.84) <strong>and</strong> (5.87).Condition 2 of the theorem restricts the class of functions that can be used as nonanalogcontribution functions (estimators). The simplest way of satisfying this condition is to choosethe nonanalog estimators identical to the analog ones, i.e., to putIl•) - f r(..)This, however, is not the only possibility. In fact, the condition states that nonanalogcontribution functions should also be partially unbiased. Indeed, in view of Theorem 5.7<strong>and</strong> Equations (5.134) <strong>and</strong> (5.141), condition 2 is equivalent to the conditionI 1(P) = KP)where I (P) is the expected score due to a flight from P followed by a collision in an analoggame with the simplest contribution f(P), as given in Equation (5.133). Correspondingly,the analog <strong>and</strong> nonanalog estimators are interchangeable <strong>and</strong> they all belong to the class ofpartially unbiased estimators. Therefore, in nonanalog games that satisfy the conditions ofTheorem 5.8, there is no need to distinguish the estimators from the analog ones. Suchgames will be called partially unbiased nonanalog games.Theorem 5.8 establishes the conditions under which the expected scores due to a unitweight starter in the analog <strong>and</strong> nonanalog games are equal. These conditions, however,ensure an unbiased nonanalog estimation only if the source densities (from which the particlesstart) are identical. In this case, the weights of the starters may be chosen equal <strong>and</strong> theequality of the expected scores per history(ies) calls forth the equality of the final scores inthe two games. In other words, the theorem gives the generation rules of the weights duringthe simulation, but it does not fix the weight of a nonanalog starter. If the nonanalog sourcedensity differs from the analog source, the statistical weight of a starter should depend onthe difference of the actual source density from the analog one. The generation rule of thestarting weight is established in the following.Theorem 5.9 — A nonanalog game will yield the same final expected score as theanalog game if the weight generation rules of Theorem 5.8 are satisfied <strong>and</strong> the weight ofa starter at P in the nonanalog game is chosen asW = w g(P) = Q(P)/Q(P)where Q(P) <strong>and</strong> Q(P) are the source densities in the analog <strong>and</strong> nonanalog games, respectively.Proof. The final expected score in a nonanalog game isR -JdPQ(P)WM 1(P)If W is chosen according to the theorem <strong>and</strong> the conditions of Theorem 5.8 are met, thenM 1(P) -M 1(P)
203<strong>and</strong> making use of the results of Section 5.1.A,R = |dPQ(P)[Q(P)/Q(P)]M,(P) = JdPQ(P)M 1(P) = Ras stated.C. A NONANALOG GAME WITHOUT STATISTICAL WEIGHTS;IMPORTANCE SAMPLINGIn the previous section, we proved that the statistical weights of any nonanalog gamemay be chosen such that the simulated particle field is identical to the analog (physicalsfield, provided one interprets the nonanalog particles as fractions (or multiples) of physicalparticles, their amount being characterized by their weights. Although this is a very reasonablemethod of simulation, there is no reason to exclude the possibility of games that do notreproduce the physical particle field <strong>and</strong> nevertheless result in unbiased estimates of th«required quantity. Indeed, such games exist <strong>and</strong> a simple but sufficiently general construct ionof such games is given below.Suppose that the nonanalog <strong>and</strong> analog kernels are related ast(P,P') = T(P,P')U(P')/V(P) (5.151)<strong>and</strong>C(P',F') = C(P',F') V(F)ZU(P') (5.152)where V(P) is some arbitrary known function <strong>and</strong> U(P) is such that|dP'f(P,P')= Ii.e.,V(P) = JdP'T(P,P')U(P') (5.153)In this case, the transport kernels [cf. Equation (5.14)] in the nonanalog <strong>and</strong> analog gamesare related asL(P,P") = L(P,P")V(P")/V(P) (5,154)Note that transformation of the analog collision kernel according to Equation (5.152)may result in a nonanalog kernel qualitatively different from the analog. Thus, if the analoggame is nonmultiplying, i.e., ifc(P') = jdP"C(P',P") == c s(P') « Ithen the mean number of secondaries in the game with the transformed collision kernel isc(P') =dP"C(P',P")V(P")/U(P')
204 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationswhich may be greater than unity, thus resulting in a multiplying game. Similarly, in caseof a general analog kernel, the transformation may result in a collision kerne! in which purescattering also leads to multiplication. This leaves some freedom to the user in defining theabsorption, scattering, <strong>and</strong> multiplication probabilities. This question will not be investigatedhere, but should be considered in practical applications. In what follows, we use the generalform of the collision kernel as given in Equation (5.74) (omitting the irrelevant absorptionterm). Accordingly, the transformed kernel from Equation (5.152) readsC(P',P") - c\(P')C s(P',P") + C 1-(P') X nq n(P')C n(P',P")V(P") c s(P')C s(P',P") + c f(P') V nq n(P')C n(P',P"),/U(P') (5.155)for every P' <strong>and</strong> P" inside the domain of simulation.We shall now derive an unbiased nonanalog game which is played by the kernels inEquations (5.151) <strong>and</strong> (5.152) <strong>and</strong> in which the statistical weight of a particle is not changed.In a sense, this game is very unusual: it is nonanalog, since the kernels differ from theanalog ones; nevertheless, it resembles an analog game because of the constant statisticalweights. Such games will be referred to as transformed games. They also differ from thenonanalog games treated in the previous section in that they are not expected to give unbiased"pointwise" estimates, i.e., the expected score due to a single starter will not necessarilybe the same as in the analog game. Instead, we require that it produce an unbiased estimateof the final score, i.e., of the integral quantity of interest. Let M 1(P) denote the expectedscore due to a unit weight starter from P <strong>and</strong> let Q(P) be the (yet undefined) nonanalogsource density. The transformed game is unbiased ifdPQ(P)IOi,(P) -JdPQ(P)M 1(P) = Rwhere W is the statistical weight of the starter from P in the transformed game. This weightis defined by the equality itself in the sense that proper choice of it will eventually ensurethe unbiased final estimate, as will be seen below.Again let f(P,P'), f a(P'), f s(P',P"), <strong>and</strong> f n(P',P") be the contribution functions assignedto a transition, absorption, scattering, <strong>and</strong> n-tuple multiplication event, respectively, in thetransformed game. Obviously, the transformed contribution functions are not expected tobe partially unbiased <strong>and</strong>, in general, will be different from the analog estimators.The equation that governs the expected score due to a unit weight starter follows fromEquations (5.129), (5.130), (5.151), <strong>and</strong> (5.152) asA(P) = i,(P)/V(P) + JdP' T(P 5P') J dP" C(P', F)Jt 1(P")= .¢, (P)/V(P) + J dP' T(P 5P') J dP"C(P' ,F') V(P")it,(P")/V(P) (5.156)where^1(P) =dP'T(P 5P') U(P')f(P,P') +c a(P')f„(P')+ E,(P')JdP"C s(P',p")f s(P',p")+ c f(P') I nq„(P') fdP"C n(P',P")f„(P',P")(5.157)
205The conditions under which the transformed game is unbiased are given in the followingtheorem.Theorem 5.10 — The transformed game results in the same final expected score as theanalog game if:1. The source term in Equation (5.157) satisfiesi,(P) = I(P) (5.158)I (P) being the expected analog score in a flight as given in Equation (5.133).2. The nonanalog source density is chosen according toQ(P) = Q(P)V(P)/|dF Q(P') V(P') (5.159)3. The weight of every starter isW = ! dPQ(P)V(P) (5.160)Proof. Comparison of Equations (5.132) <strong>and</strong> (5.156) shows that if J>,(P) = 1(P), thenV(P)Ji 1(P) = M 1(P) (5.16()i.e., V-Ji 1is just the expected score due to a starter in the analog game. Furthermore, ifEquations (5.159) <strong>and</strong> (5.160) hold, thenQ(P)ITJi 1(P) = Q(P)V(P)Ji 1(P) =Q(P)M 1(P)i.e.,IdPQ(P) 1 WJt 1(P) = JdPQ(P)Jl 1(P) -Ras stated.Li'The simplest way of satisfying condition (5.158) is the choicef(P,P') = f(P,P')/U(P')- w(P')f(P,P')f,(P') = c 8(P')f a(P')/[c„(P')U(P'))w(P')w,(P')f a(P')f (P' ,P") = c,(P') C S(P' ,P") f s(P' ,P")/[c s(P') C 5(P' ,P") U(P')I- w(P')w„(P',P")f„(P',P")fJP'.P") =c 1(P')q,,(P')C„(P',P")f„(P'.P")/[c r(P')q„(P')C„(P',P")U(P')l = w(P')w n(P',P")i„(P'.P") (5.162;
206 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationswhere f, f a, f s, <strong>and</strong> f„ form a set of partially unbiased estimators in the analog game asdefined in Section A. Alternatively, if one applies an expectation-type estimator asIf one wants to make life still more complicated, one can further distort the transformedgame by introducing nonanalog transformed kernels <strong>and</strong>, concurrently, statistical weights.The weight generation rules of the previous section then apply, with the transformed kernelsin place of the analog ones. What is to be kept in mind is that distorted or not, the transformedgame, in general, is not directly related to the physical phenomena. It simulates the historiesof hypothetical particles, <strong>and</strong> only the final expected score coincides with the analog one.This fact is also reflected by condition (5.158) <strong>and</strong> by Equations (5.162) <strong>and</strong> (5.163), whichimply that different transformed estimators are to be used in different transformed games,in contrast to the partially unbiased nonanalog games where the estimators can be chosenindependently of the kernels.Looking at the transformed kernels from another point of view, they also can be interpretedas the kernels in a partially unbiased nonanalog game with statistical weights. If oneplays this nonanalog game, it will most naturally yield the same expected score as thetransformed game if the weight generation rules of Section B are applied <strong>and</strong> the particlesare started from the analog source density.The particularity of such a nonanalog game is due to the specific forms of the nonanalogkernels in Equations (5.151) <strong>and</strong> (5.152), <strong>and</strong> manifests itself in the fact that the weight ofa particle depends on the coordinates of the two phase-space points between which the actualtransition or collision takes place, but is independent of the prior history of the particle. Itis this feature of the nonanalog game that makes it unusual, <strong>and</strong> makes it possible for theweights, once they have been absorbed into the contribution function (cf. Equation (5.162)),to seem to disappear. Thus, the transformed game is not something radically different froma usual partially unbiased nonanalog game, but, rather, is a reformulation of a specificnonanalog game.The advantage of the transformed game is twofold. First, if the function V(P) is chosensuch that the transformed kernels assume higher values in regions from where more detailedinformation is required <strong>and</strong> are lower in less important regions, then the simulation isconcentrated on the important regions with high probability. As a result of this, reductionof the variance of the score is expected. This is why selection of coordinates from thetransformed kernels in Equations (5.151) <strong>and</strong> (5.152) is called importance sampling.* 6 - t2 - lH - 42On the other h<strong>and</strong>, even if one constructs a partially unbiased game that results in the samefirst <strong>and</strong> second moments of the score as in the transformed game, the latter has the advantageof not requiring the calculation of statistical weights. The price to be paid for importancesampling is that the starters' coordinates are to be selected from the transformed density inEquation (5.159) rather than from the analog one. Also, the determination of contributionsmay involve extra computations. In practical cases, it usually pays off.The equation that governs the second moment of the score in a game with importancesampling will not be detailed here. On the basis of the results in Section 5.III.B, its constructionis straightforward. It will be shown, however, that importance sampling, in prinf(P,P')I(P)/V(P) (5.163)<strong>and</strong> sets all the other estimators to zero, then Equation (5.158) is obviously satisfied sincein this caseI 1(P)I(P)* The function V(P) is often called the "importance function". Since the same name is applied to the adjointcollision density >h*(P) <strong>and</strong> sometimes also to the expected score M 1(P), we would rather not use this terminology.
207ciple, may result in a game of zero variance. It will be proven in Section 5.VIII.A that thechoiceV(P) =M 1(P)provides a zero variance scheme, i.e., the better the function V(P) approximates the expectedscore, the smaller the variance expected.1.). GENERALIZED EXPONENTIAL TRANSFORMATIONImportance sampling has first been applied in a si..i.pk'.jiu , .. 'of the calculation of reaction rates deep in matter, .p' i ,estimations because of the approximately exponential i'ieiu. toi * >u >increasing depth having the consequence that the nun.>>•> • > ' > M < • •game in which the number of particles decreases shr* *i «•*«'> .1. n* h • » •source) than in the analog game, the statistical accural v Jt u » i , i » , i •Such a hypothetical game may be defined In two way L >'„ i < h t11' nkernel in such a way that the m e a n free flight toward •hr dthus forcing the particles to penetrate deeper than tin v would •n me iu4^
208 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculations<strong>and</strong>C(P',P") = exp[b(P') - b(P")]C(P',P")/A(P') (5.168)where A(P') is such that T(P,P') is normalized to unity. Taking into account the identityb(P') - b(P) d UoVNr + tco) (5.169)(where
functions only, we define the transformed contribution functions f 0(a = a,s,n) by theequationJdP'T(P,P')[f(P,P') + c a(P')f,(P') + c\(P')|dP"C s(P',P")t;(P',P")+ c,(P') I nq„(P')/dP'C n(P',P")f„(P',P")] = J 1(P) (5.174)Note, however, that Equation (5.174) becomes identical to condition (5.158) in Theorem5.10 in the previous Section if one substitutesU(P') =
210 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationssituated between x = 0 <strong>and</strong> x = X perpendicuiar to the x axis. The analog transition kernel,Equation (5.32), reads"T(P,P')dP' = o- • exp[o-(x-x')/(x]dx'/||A| for p-(x-x') < 0 (5.176)while the collision kernel has the specific formC(P',P")dP"c sC s(|i..|x')tV if 0 « x' ss X0 otherwise(5.177)where p, is the cosine of the angle between the particle's direction <strong>and</strong> the positive x axis.Note that we have introduced the vacuum-equivalent purely absorbing surroundings asdefined in Section 5.I.B. Assume that the only nonvanishing contribution is what is assignedto an intercollision free flight <strong>and</strong> it has the form f(x,x',jx). Then the analog first-momentequation (Equations (5.126) <strong>and</strong> (5.127)] readsM,(x,fx) =JP-(X I'M! J 1IIjdx' p-r exp[a(x- x')/p,]x [f(x,x» + c sJ dp.'C s(p,,p/)M,(x',u.')] (5.178)If the quantity to be estimated is the number of particles transmitted through the slab dueto a particle entering the slab perpendicular to the surface x = 0 in a positive direction,then the analog source density readsQ(P)d(xdx = 8(x)8(p.- l)dp.dx<strong>and</strong> the reaction rate (in fact, leakage rate) that is estimated is writtenR = Jdp, J dx'iKx',p,)i.e., the number of particles absorbed beyond x = X (keeping in mind that the medium ispurely absorbing in this region). The general form in Equation (5.2) of the reaction rate inslab geometry has the formR = J dp,J dx'f(x',p,)vj Of(x» (5.179)O otherwiseHere <strong>and</strong> in further applications, the delta functions <strong>and</strong> the corresponding arguments in the kernels will beomitted, as if the integrations with respect to them had been performed.
211The simplest contribution function is the weighting function itselfF(x,x',p.) = FTx', (x)which yields a score only if the particle leaves the region x < X. Alternatively, the simplestexpectation-type partially unbiased estimator follows from Theorem 5,7 <strong>and</strong> Equation (5.176)f(X,x',Ll) = I 1(X 1Ll) = JdP'T(P,P')f(x.',u,).exp[cr(x - X)/li] if u, > 0"0 otherwise(5,180)From the point of view of estimation, the reaction rate in question readsR = J dp, J dxQ(P)M 1(X,p.) = M 1(O 5I)The expected score M,(x,(i) due to a starter at x in positive direction j.x decreases approximatelyexponentially as x is moved from X toward zero. [This is also reflected by the firstflightexpected score in Equation (5.180).] Therefore, it is expedient to use an exponentialtransformation of the formJt 1(X,Li) = exp[b(u,)(X - x)]M,(x,ix) (5.181)that makes the expected score in the transformed game more uniform along the x axis. Itis reasonable to choose the function b(|x) such that it assumes larger values for positivedirections (pointing toward the important region) <strong>and</strong> has lower values in the oppositedirections. Practical realizations will be overviewed in Section 7.HLC in connection withthe optimization of path stretching.Now the transformed game will be played with the following functions. In view ofEquations (5.170) through (5.173), the transformed kernels becomeT(P,P')dP' = fj(jx)explrT(p.)(x - x')/fj,]dx7|jx| for fj,(x-x') > 0 (5.182)<strong>and</strong>C(P',P")dP" = •7^- exp{[b(|x) - b((x')](X - x')}c.C,(n,|i')dti' (5.183)cr(fx)wherecf(u.) = ex - fxb(fx) (5,184)<strong>and</strong> in order to keep the stretched cross section meaningful, wc must require thai jb(jx)j
212 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculations<strong>and</strong> the weight of the starters at x = 0 isW = e'"" xThe contribution function in the transformed game follows from Equations (5,162) <strong>and</strong>(5.163) with the explicit form of the function U(P') in Equation (5.175):U(P') = 6-(p,)exp["b(p.)(X -x')]/rxIf the analog contribution is the weighting function in Equation (5.179), then the transformedcontribution, from Equation (5.162), becomesf(x,x'.p.) = aexptb(ix)(X - x')l/a(p.) if x' > X, p. > 0 (5.185)<strong>and</strong> it is zero otherwise. Alternatively, if the expectation estimator in Equation (5.180) istransformed, then from Equation (5.163)f(x,x',fi) == exp[b(p,)(X x')JI,(x, 0 (5.186)<strong>and</strong> zero otherwise. It is interesting to note that the estimator in Equation (5.186) is againthe expected value of the leakage estimator (5.185) over a flight from x in the transformedgame; i.e., the transform of the analog expectation estimator is the expectation estimator inthe transformed game.E. PATH STRETCHINGAs was mentioned in the previous Section, distortion of the transition kernel in such away that the mean free flight of the particles is increased toward more important regions("stretching" of the particles' flight) may also increase the number of particles reachingthese regions. Jn general, the term path stretching (or track-length biasing) means that theanalog transition kernel is replaced by a nonanalog kerne! of the formT(P,P')dP' = 6-(P') exp -- dtcr(r + tw,E) dD; P' = (r + Dw,E)where d(P) is to be chosen small along important directions. If the scattering kernel is notbiased, the first moment of the score in a partially unbiased nonanalog game with the transitionkernel above satisfies the equationf . f W" ~M 1(P) = I 1(P) + JdP'T(P.P') JdP"C(P',P") —-M 1(P")that follows from Equations (5,129) through (5.131). The source term of the equation iswrittenI 1(P) -dP'T(P,P')W—Wf(P,P') + F C(P',P")where F t,(P',P") is a shorth<strong>and</strong> notation of the (analog) expected contributions from the firstcollision as detailed on the RHS of Equation (5.130). The game is partially unbiased, i.e.,
213M 1(P) = M 1(P) if the weight generation rules of Theorem 5.8 are applied. In this specificcase, these rules becomeW = W • o(P')exp| - J dt[cr(r + tw,E) - £(r + tw,E)'| J/CT(P')<strong>and</strong>W" = WNow, denotingi.)Vb(P) = cV(P) - (T(P) (5.187)we find that the nonanalog transition kernel in the case of path stretching is identical to thekernel in Equation (5.171), introduced in connection with the exponential transformation.The difference between the two games is that in path stretching, the bias in the transitionkernel is compensated for by statistical weights of the formW = Wcr(P')explb(P') - b(P)]/o-(P') (5.188)<strong>and</strong> a partially unbiased nonanalog game is played, while in the game with exponentialtransformation, the factor multiplying the statistical weight in Equation (5.187) is includedin the collision kernel <strong>and</strong> the transformed moment. This leads to the transformed collisionkernel in Equation (5.173) <strong>and</strong> to the transformation of the source distribution. As a resultof this, the exponential transformed game is played without statistical weights. We havetherefore proven that importance sampling, exponential transformation, <strong>and</strong> path stretchingrepresent different realizations (or just formulations) of the very same nonanalog simulationprocedure.Path stretching is applied if, for some reason, distortion of the collision kernel is notadvisable. The usefulness of path stretching in a given problem depends on the choice ofthe biasing function b(P). In slab geometry, the distorted total cross section follows fromEquation (5.187) asd
214 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> CalculationsLet M 1(P) denote the expected value of the computing time necessary for the simulation ofa nonanalog history that is started from the point P. We shall suppose that the time of playingany event is independent of the coordinates of the event. In the majority of the computerapplications, this assumption is justified. Furthermore, we assume that playing an absorptiondoes not necessitate extra computing time <strong>and</strong> the times for selecting from the various kernelsin a collision (scattering, n-fold multiplication) are equal to each other.In view of the assumptions above, computing time is spent for two types of events; atime if is necessary for playing a free flight (including the check of a possible escape <strong>and</strong>the selection of the type of collision) <strong>and</strong> a time t cis spent by the selection of the postcollisioncoordinates. Obviously, these time values are independent of the weight of the particle.Note that these times can be considered as contributions of the respective events in anonanalog game, while the weight of the particle is kept unchanged. Summing up thesecontributions, an estimate of the computing time per history is obtained <strong>and</strong> the momentequations can be used for the analysis of the estimate. More rigorously, M 1(P) satisfiesEquations (5.129) through (5.131) with the contribution functionsf(P.P') = t f, I) 1(P') -- 0f,(P',P") = f„(P',P") =t c<strong>and</strong> with the weightsW' = W" = W a = W^' = WHenceM 1(P) = t f+t c|dP'f(P,P')c(P')+ JdP'f(P.P')|dP"C(P',P")M t(P") (5.190)This Equation may play a role in the a priori estimation of the efficiency of various games.In most cases, it is satisfactory to work with a simpler form of the equation where weassume that the computing time per history is simply proportional to the number of flightsto be simulatedM 1(P) = I 0N(P) (5.191)where N(P) is the expected number of flights in a history started at P. This is the case ifthe time of playing a flight is t f= t„, while t c= 0. Obviously, N(P) is the solution of theequationN(P) = 1 + |dP'f(P,P')JdP"C(P',P")N(P")= 1 •f JdF'L(P,P")N(F) (5.192)On the basis of Equations (5.190) <strong>and</strong> (5.192), it is easy to establish conditions underwhich a nonanalog game requires less computing time than a corresponding analog game.For the sake of simplicity, let us consider the number of flights as a true measure of thecomputing effort <strong>and</strong> consider the analog equation corresponding to Equation (5.192):N(P) -- 1 + dP"L(P,P")N(P")
2HLetn(P) = N(P) -N(P)Then n(P) satisfies the equationn(P) = fdP"[L(P,P") - L(P,P")|N(P") + jdF'L(P.P")n(P")Now if the nonanalog game is feasible, then this equation ha i \ w ot» -••." •to Theorem 5.2, n(P) > 0 if L(P,P") > L(P,P") at every , i , .Thus, we have the following.Theorem 5.12 — A nonanalog game with the kernea lower expected number of collisions (flights) than the ansatisfy the inequality\dP'T(P,P')C(P'.P") >(dP'T(P,P')C(P\P")for every P,P" such that N(P") > 0.Note that this simple condition is sufficient but not c < • . < • i imay be needlessly strict. Nevertheless, in many practice' • i.,i< , i
216 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> CalculationsG. FEASIBILITY OF A NONANALOG GAMESufficient conditions of the feasibility of an analog game were derived in Section 5.LB.Under these conditions,the expected number of particles present in the domain of simulationtends to zero with a probability 1 if the number of collisions in the history tends to infinity.The conditions concern the norm of the analog transport kernel L(P,F') in Equation (5.14)<strong>and</strong> are formulated in Theorems 5.1 <strong>and</strong> 5.2. Most naturally, if the nonanalog transportkernel defined asL(P,P")satisfies the same conditions, then the number of nonanalog particles will also tend to zeroas the simulation goes on <strong>and</strong> consequently Equation (5.192) will also have a unique boundedsolution. In other words, under the staled conditions, the expected number of collisions inthe nonanalog game without Russian roulette will also be finite with a probability 1. Therefore,it might seem reasonable to impose the conditions of Theorem 5.1 on the nonanalogtransport kernel L as well in order to ensure the feasibility of the nonanalog game. Thereis, however, a little problem with this reasoning; namely, nonanalog games not conformingwith these conditions are widely used <strong>and</strong> are found feasible. The resolution of this apparentcontradiction is that it is not the number of collisions but the total statistical weight of theparticles present in the system that determines the feasibility. This is so because particleswith low weights can be eliminated from the system with high probability by the applicationof Russian roulette <strong>and</strong> this elimination will leave the estimation unbiased. In the analoggame, the statistical weights of the particles do not change <strong>and</strong> therefore the number ofparticles in the system is equivalent to the total weight of them. A finite number of collisionsper history then implies the elimination of all the particles, i.e.. the total weight of theparticles. In a nonanalog game, however, the number of particles has no direct connectionto their total weight.In order to illustrate the situation, let us consider a simple example. Let the quantity tobe estimated be the absorption rate due to a monoenergetic particle migrating in a nonmultiplyinghomogeneous infinite medium. Let the total cross section of the medium be unity<strong>and</strong> let the scattering probability be c. Accordingly, the reaction rate that is estimated readsi.e., the weighting function isf(P) = 1 - cThis weighting function will serve as the estimator scoring at every collision. Assume thatsurvival biasing is used (cf. Chapter 3.11), i.e., that absorption is replaced by weight reduction.Hence the, nonanalog kernels areT(P,P')dP" -T(P,P')dPDdD for P' = (r + Dw), D S= 0<strong>and</strong>C(P',F') - C(P',P")/c = C 5(w,oj')
21?The weight of a particle undergoing a collision, according to Equation (5.147), is multipliedbyw,(P',P") = cThus, if the weight of a starter is W„ =the n-th collision, then1 <strong>and</strong> W ndenotes the weight of the particle afterW n= W n., • w s(P',P") = c"(5.193''The expected score follows from Equation (5.56) asM 1(P) = (1 - C)JDP'T(P.P') + cJdP'T(P,P') [dP''C(P'.P')M,(P'')This equation has the solutionM 1(P) = 1a rather trivial result. Now, in the analog simulation (where no survival biasing is applied),the expected number of collisions follows from Equation (5.192)N(P) - 1 + |dP"L(P,P")N(P")Its solution isN = - 1/(1 - c)This means that the number of collisions is finite with probability 1, which also followsfrom Theorem 5.1 since the conditiondP"L(P,P") = c < 1is satisfied. On the other h<strong>and</strong>, the expected number of collisions in. the nonanalog game isunbounded, <strong>and</strong> the conditions of Theorem 5.1 also fail to hold fordP"L(P,P") = jdP"L„(P,P") - 1However, it is seen from Equation (5.193) that the total weight of the particle tends to zerowith an increasing number of collisions. Assume that Russian roulette is applied in thenonanalog game in the following way. If the weight W kof the particle becomes less tfutesome threshold value w th, it is turned to unify with a probability W,, <strong>and</strong> is set io zero withthe complementary probability. Now if w this such thatC 1 " < w lh< c k 1the Russian roulette is played after every k-th collision <strong>and</strong> the particle survives with nprobability W k= c 1 . Hence, the probability that the particle is alive after N - m • kcollisions is c N , which means that the particle is removed from the system with a probability
218 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculations1 if the number of collisions tends to infinity. Therefore, we conclude that although thenonanalog kernels do not satisfy the conditions of Theorem 5.1, the game is feasible providedRussian roulette is applied.Two comments are to be made here:1. Notice that from the point of view of the number of collisions, Russian roulettemanifests itself as an artificial extra absorption, thus making the otherwise unfeasiblegame feasible.2. Strictly speaking, the nonanalog kernels with <strong>and</strong> without Russian roulette are different<strong>and</strong> therefore when examining the feasibility of the nonanalog game, the kernels shouldbe modified to account for Russian roulette (as introduced in Section 5.HI.D). Themodified kernels then satisfy the conditions of Theorem 5.1 in most practical cases.Nevertheless, we shall investigate the conditions of feasibility of a nonanalog gamewithout supposing explicit inclusion of Russian roulette. More precisely, we firstexamine the conditions under which the total weight of particles in a nonanalog gametends to zero. Next, we prove that if the weights tend to zero, then Russian rouletteyields a finite game with a probability 1. It turns out that any partially unbiasednonanalog game that corresponds to a feasible analog game is also feasible.Theorem 5.13 — Given an analog game which is feasible in the sense of Theorems5.1 <strong>and</strong> 5.2. If the statistical weights in an arbitrary nonanalog game are chosen accordingto the selection rules of Theorem 5.8 (i.e., if the nonanalog game is partially unbiased) <strong>and</strong>the weights so generated are bounded at every point of the nonanalog domain of simulation,then the total weight of the particles present in the domain of simulation tends to zero asthe number of collisions in a history tends to infinity.Proof. For nonmultiplying games, the theorem is proven in Reference 29. Here we give theproof for a general multiplying game.Let cp k(P,W)dWdP be the probability that a particle leaving its k-th collision in dP aboutP has a weight in dW about W. (The number k also comprises all the collisions sufferedby the ancestors of the particle back to the source.) For convenience, source particles areconsidered to leave their 0-th collision. Thuscp D(P,W) = 8[W - w q(P)]Q(P) (5.194)wherew q(P) === Q(P)/Q(P) (5.195)the statistical weight of a starter at P, as shown in Theorem 5.9. It is heuristically obviousthat (p kis the sum of the probabilities assigned to the various collision events. More precisely,s)let 9 k(P,W)dWdP be the probability that a particle leaving its k-th collision via scatteringin dP about P has a weight in dW about W. Similarly, let (p' k"' ) (P,W)dWdP be the sameprobability if the particle is the i-th in an n-fold multiplication. Thencp k(P,W) = cp«(P,W) + 2 S 9^(PVW) (5.196)n -= i i«iOn the other h<strong>and</strong>tp< s, (P",W")dW" = dPcp k_ ,(P,W) dP'f(P,P')c s(P')Q(P',P")dW (5.197)
219where, according to the weight generation rules in Equations (5.142) through (5.147)W =W"/[w(P,P')w s(P',P")]= W"f(P,P')£XP')C s(P',P'')/jT(P,P')c s(P')CJP',P"jj (5.198)The balance Equation (5.197) is interpreted as follows. The probability of a given weightafter a scattering is the integrated product of the probabilities of having a weight conformingwith the weight generation rules after the previous collision <strong>and</strong> of making a free flightfollowed by a scattering. Similarly, for the i-th progeny in an n-fold multiplication^< n.i) (p» ;W") dw kn,i)(P)dP are the corresponding eventwise expectations, then from Equation(5.196)«(P) + S 2 (K-(P)n = 1 i = 1Multiplying Equations (5.197) <strong>and</strong> (5.199) by W", making use of the relations in Equations(5.198) <strong>and</strong> 5.200), <strong>and</strong> integrating with respect to W, we obtain the recurrence k(P") - |dP(|) k_i(P)L(P,P") k - 1,2,... (5.2Oi)where, as beforeL(P,P") =JdP'T(P,P')C(P',P")the transport kernel. For k = 0, Equation (5.194) gives(J) n(P) = Q(P) (5.202)Repeated use of Equation (5.201) <strong>and</strong> insertion of Equation (5.202) yields
220 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationswhere the iterated kernel L kis defined in Equation (5.18). The total expected weight of theparticles that leave collisions anywhere in the domain of simulation is4> k= JdP"cjo k(P") = JdPQ(P)JdP"L k(P.P")The salient point of the proof is that the expected weight is expressed by the analog iteratedkernel L k. Now, if the analog game is feasible, then the conditions of Theorem 5.1 hold,i.e., if k = m • N + i where N is the threshold number in Equation (5.17) <strong>and</strong> 0 < i k- 0k—as stated.•The theorem above does not yet establish the feasibility of a partially unbiased nonanaloggame. It remains to prove that a history in which the statistical weights tend to zero can beterminated in a conservative (unbiased) way after a finite number of collisions. We havealready referred to the Russian roulette procedure as an unbiased termination procedure thatpreserves the expected value of the particles' weights. In the proof below, we considerRussian roulette as a special case of collisionwise splitting. We suppose that a. particleleaving a collision at P with a weight W is killed with a probability Z 0(PX) <strong>and</strong> is left alivewith a probabilityz,(P,W) = 1 - Z 0(P 1W)Sn view of Equation (5.97), the survivor leaves the roulette with a weight WZz 1(P 1W). Wenote that extension of the considerations below to more general splitting procedures islaborious, but leads to conclusions similar to those of the following.Theorem 5.14 — If the probability of a survived Russian roulette, Z 1(P 1W), is suchthatHm Z 1(P 1W)ZW = Z < +oo (5.203)w—>0then the number of collisions is finite with probability 1 in any history where the statisticalweights tend to zero.Proof. It is to be shown that the probability of an infinite number of collisions is zero. Let'2P Nbe the probability that a particle survives n successive Russian roulette procedures. If
221P 1, P 2, ... P n<strong>and</strong> W 1, W 2, ... W n, respectively, denote the coordinates <strong>and</strong> weights of theparticle after the respective collisions (but before roulette), then?i> n= (I Z 1(P 11W 1)i = iOn the other h<strong>and</strong>, if W" would be the weight of the particle after the i-th collision in thesame game without roulette, thenW, = W 1'<strong>and</strong>W n= W nAl' Z 1(P 11W 1) n = 2,3,...Inserting this relation into 2P n, the n-fold survival probability reads0A- W nZ 1(P 1 1 1W nVW nNow, according to the assumption of the theorem, the weight in the game withoutsplitting tends to zero as n increases, i.e.,lim W 1; = 0<strong>and</strong>, by Equation (5.203), z,(P„,W„)/W nremains finite even if W nvanishes. Hencelim S»„ = (lim W n)(IIm Z n)(P 111W n)ZW n= 0thus establishing the theorem.Note that the simplest form of the Russian roulette as introduced in Section 3.11 <strong>and</strong>Section 5.III.D conforms to the conditions of the theorem as thereZ 1(P 1W)W/w sp(P) if W=S w th(P)1 if W > w th(P)withw sp(P) >W 1n(P)<strong>and</strong> thereforeZ,(P,W)/W1/W 1n(P) < oofor every weight value W.
222 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> CalculationsH. DELTA SCATTERINGIn certain applications, it is desirable to generate a greater number of collision pointsin a history than results in an unaltered analog game. This may be reached for example, byusing track-length biasing (cf. Section E) if the biased total cross-section is chosen higherthan the analog one (path shrinking). The same effect can, however, be obtained in a modifiedanalog game as follows. Let us define a modified total cross section instead of the analogcross section o~(P) as(J 8(P) CT(P) + CT 11(P)where cr 0(P) is some given nonnegative function. LetT 8(P-P') =CT 8(P') expp'dta 6(r + tw,E)be the modified transition kernel to be used in the simulation. So far, the procedure isidentical to that in path stretching. Now letq s(P) -o- 0(P)/o- B(P)Obviously, q§(P) is between zero <strong>and</strong> one. Let the game be played in the following way:1. Let the particle leave an analog collision at P.2. Let us select a free flight from T 8(P,P') <strong>and</strong> move the particle to P'.3. With a probability 1 - - q 5(P'), let us play an analog collision <strong>and</strong> go to step 5.4. With a probability q s(P'), the directional <strong>and</strong> energy coordinates of the particle areleft unchanged (a delta scattering is played) <strong>and</strong> we return to step 2.5. The scores are determined according to the analog events between two analog collisions.First, it is to be proven that the delta-scattering game above is unbiased, i.e., that the analogcollision density produced by it is identical to that in a game without delta scattering. Thisfollows from the following.Lemma — The probability density of the distance between two analog collisions isidentical to the analog transition kernel.Proof. Let T^(P,P') denote the probability density that a particle starting from the point Phas its next analog collision in the delta-scattering game about P'. Then it is to be shownthatT*(P,P') =T(P,P')Now, T,(P,P') satisfies the equationT +(PJP') T 8(P,P')[1 - q 8(P')] + j dP.T^P.^PJT^P^P') (5.204)since according to steps 2 through 4 above, having selected a flight from T 6(P 1P'), theparticle will either suffer an analog collision [with a probability 1 — q 5(P'); this is expressedby the first term] or the selection procedure is restarted at the point of delta scattering [with
a probability q s(P'), represented by the second term on the RHSK I,et us writeformT +(P,P') =a(P')eana also i« as'T 8(P,P') =cr 5(P')ewhere, according to the definition of T 8T FI(P,P') - j dta 5(r+ toj,E) = j dtftr(r + tw.E) + CT (,(r + tfcj,E)i- t(P,P') + T,(P,P')Then Equation (5.204) reads['" ,j (p )o-(P')e- T,(p - p,) = cr(P')e ^ P J > "' + dP, CT 8(P 1)e" ^'•^ ------ (r(P')e " T -"'''"'Jp ST 5(P 1)= o-(P')e~ T *
224 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationsto that in the analog game (i.e., if only analog events contribute to the score), then thedelta-scattering game is unbiased. One may, however, also wish to assign scores to flightsending in delta scatterings. This can be done in an unbiased manner by examining the firstmomentequation of the delta-scattering game. The transition kernel in this game is T 8(P 1P').Although delta scattering is defined through an alteration of the analog transition kernelonly, let us realize that by requiring a straight-ahead scattering whenever delta scatteringoccurs, we also have implicitely altered the collision kernel toC S(P',P") - [I - q s(P')]C(P',P") + q B(P')8(P"-P')With these kernels, the expected value of the score due to a particle starting from P in adelta-scattering game satisfies an equation of the formM 1(P) = I 8(P) +JdP'T 5(P,P')jdP"C 5(P',P")M,(P")where I 6(P) represents the expected score due to a single flight <strong>and</strong> collision (irrespectiveof whether it ends up in an analog collision or in a delta scattering). The expected partialscore I 6(P) is to be chosen such that the solution of the moment equation is identical to thatof the analog first-moment equation. The first-moment equation above is detailed asM 1(P) = I 5(P) +jdP'T s(P,P')q 6(P')M,(P')[dP'T 8(P 1P')[1 -q s(P')jJdP"C(P',P 1 OM 1(P")On the other h<strong>and</strong>, the analog moment equation is given in Equation (5.126) asM 1(P)--- I 1(P) + J dP' T(P,P') j dP"C(P' ,F)M 1(P')Comparing the two Equations, we haveI 6(P) = I 1(P) + JdP'{T(P,P') -T 8(PJP')[1 - q 8(P')]}jdP"C(P',P")M 1(P")[^'T 8(P 5POq 8(POM 1(P')The second term on the RHS can be rewritten according to Equation (5.204) (with T.T, in view of the lemma). ThusI 8(P) = I 1(P) 4- |dP'f dP, T 8(P 5POq 6(P 1)T(P 15P') IdFC(POF)M 1(F)IdP 1T 6(P^Oq 6(P 1)M 1(P 1)= I 1(P) + dP,T 6(P 5POq 8(PO-S I dP'T(P 15P') IdFC(POF)M 1(F) - M 1(P 1)JFinally, according to the analog moment equation, the terms in on the RHS reduce to-1,(P0, i.e.,I 5(P) = I 1(P) - UP 1T 6(P 5POq 6(P 1)I 1(P 1) (5.205)
225Equation (5.205) determines the relation between the expected scores in the two games doeto a flight-collision event pair. Thus, if the partial score in the delta-scattering game satisfiesEquation (5.205), the game is unbiased.In the special case of the simplest collision estimator, i.e., ifI 1(P) =jdP'T(P,P')f(P')<strong>and</strong>I 6(P) =fdP'T 6(P,P')f B(P')Equation (5.205) yieldsfdP'T(P,P')F(P') = jdP'T s(P,P')F 8(P') +• J dP.TsCP.P.^P.) j dP'TfP, ,P')F(P'>Multiplying Equation (5.204) by f(P') <strong>and</strong> integrating with respect to P', it is seen thatf fi(P') = f(P')[l -q S(P')]satisfies condition (5.205). The result is heuristically obvious: the probability of an analogcollision at P' is 1 — q 8(P'); therefore, in any collision (analog or delta scattering), thescore is equal to the analog score times the probability of an analog collision. It is equallyobvious that if the contribution function in the analog game is additive, i.e., iff(P,P') = f(P,P,) + f(P,,P')(this is the case with the track-length estimator), thenf 8(P,P') = f(P,P')This can again be proven by multiplying Equation (5.204) by f(P,P'), integrating over P',<strong>and</strong> comparing the result to Equation (5.205).A special application of delta scattering can substantially simplify the simulation. If theartificial cross section CT 0(P) is chosen such that the modified cross-section CT 5(P) is independentof the position of the particle, then free flights can be simulated without regard topossible crossings of boundaries between two different media. 11 - 45 This may make the trackingmuch faster, since there is no need to calculate geometrical <strong>and</strong> optical distances betweencollision points <strong>and</strong> region boundaries. Note, however, that the gain in computing time bythis trick again is deteriorated by the loss due to the increased number of collisions. Tcminimize this loss, it is advisable to choose
226 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> CalculationsThe idea of delta scattering has served as a theoretical too! for introduction of the tracklengthestimator. 42It also has recently been applied in practical calculations in connectionwith correlated games/ 9 ' 4 0The second-moment equation of the game follows easily from the analog momentequation derived in previous chapters by simply substituting T s<strong>and</strong> C sin place of the analogkernels, <strong>and</strong> will not be detailed here. Similarly, the number of collisions to be played ina history will satisfy Equation (5.192) with the respective kernels. The heuristically obviousfact that delta scattering increases the number of collisions per history can also be seen onthe basis of Theorem 5.12.VI. PARTIALLY UNBIASED ESTIMATORSWe have seen in Section 5, V.A that a set of estimatorsS{f(P,P'),f,(P'),f. ;(P' ,P"),{nf f(P' ,P")}:..,} - S{f,f„f ,{nfj} (5.206)result in an unbiased estimate of the reaction rateRJdPiKP)f(P)in an analog game governed by the kernels T(P,P'), C 5(P',F'), <strong>and</strong> {C n(P',P")}^, if therelationdP'T(P 1P') f(P,P') + C 11(P')f a(P') + c s(P')JdP"C s(P'.P")f s(P',P")+ c r(P') 2 Q n(P') jdP"C n(P',P")nf n(P\P") --- |dP'T(P,P')f(P') = I(P) (5.207)holds. It has also been seen in Section 5.V. B that any nonanalog game that satisfies theweight generation rules of Theorem 5.8 is also unbiased with the same estimators. Estimatorsin the set (5.206) that satisfies Equation (5.207) were called partially unbiased estimatorsas any such set results in the same expected partial score in a flight followed by a collision.Obviously, the simplest partially unbiased set isS{f(P'),0,0,(0}}S{f,f u,f s,{nf„}^= ]} is a shorth<strong>and</strong> notation of the estimation procedure in which f(P,P')is scored when a free flight from P to P' is played, f a(P') is the score assigned to an absorptionat P', <strong>and</strong> f s(P',P") <strong>and</strong> f„(P',P") are the scores if a particle emerges at P" from a scatteringor from an n fold multiplication at P', respectively. [This means that if in an n-fold multiplicationthe secondaries emerge at P' (' u, P' (' 2), P" n), respectively, then the score fromthis event isas detailed in Section 5.III.A.JIn an analog game, we have a certain freedom in defining the separate scores; namely,the score assigned to a free flight can also be attached to the scores due to the different
227possible events in a collision, provided the expected score in a free flight + collision processremains unchanged. This idea is a simple illustration of the possible variety of the partiallyunbiased estimators <strong>and</strong> also a motivation for seeking transformation procedures that leavethe expected score unaltered. A simple example of the heuristic arguments above is that thebasic estimator S{f(P'),0,0,{0}} is equivalent to the estimator set S{0,f(P'),f(P'),{f(P')}*„.i}since both sets give the same score, f(P'), at every collision point P'. Note, however, thatthe two sets do not necessarily yield the same variance, as follows from the results of Section5.III.B.Let us introduce the following notationsf Es(P') = |dP"C s(P',P")f s(P',P") (5.208)<strong>and</strong>UP') = nJdP"C n(P',P")f„(P',P") (5-209)Evidently, f E5(P') is the expected score from a scattering at P' <strong>and</strong> it will be called theexpected scattering estimator. Similarly, f E[1(P') is the expected n-fold multiplication estimator.With these notations, Equation (5.207) becomesdP'T(P.P') f(P,p') + c a(P')f,(P') + c,(P')UP') + c,.(P') 2 q„(P')UP'>= JdP'T(P,P')f(P') = I(P) (5.210)Accordingly, the set S{f,f a,f Es,{f En}nFor convenience, in the following derivations let us denotei} that satisfies Equation (5.210) is partially unbiased.Po(P') = c,(P'),P,(P') = c s(P')P n + 1(P') = CXPOq n(P'), n = 1,2,... (5.211)<strong>and</strong>g o(P,P') = f.(P') + F(P,P'), G,(P,P') = FES(P') + X.P')g„ +1(P,P') = f E„(P') + f(P,P'), n = 1,2,... (5.212)With these notations, the set of estimators in Equation (5.210) is rewritten as 8{0,IgX 0I<strong>and</strong> the Equation itself, which expresses the condition that the set be unbiased, is rewrittenas|dP'T(P,P') £ p,(P')g,(P,P') = KP) (5.2!3)•> i = 0where, according to Equation (5.211)ip,(p') = i
228 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> CalculationsIn the following Section, transformations are derived that allow us to generate an arbitrarynumber of partially unbiased estimator sets from a known such set. SinceS{f(P'),0,0,{0},? =,} is known to be partially unbiased, the transformations make the derivationof new estimators possible. It will be shown in Section B that the most frequently usedestimators follow from the transformations. The variance of the score by the most commonestimators is estimated in a simplified transport model in Section C.A. TRANSFORMATION THEOREMSNotice that Equations (5.207), (5.210), or (5.213), which define the partially unbiasedestimators, are built up by taking successive expectations. First, the expectation of thecontributions over the possible postcollision coordinates is calculated in Equations (5.208)<strong>and</strong> (5.209). Next, these values are averaged with the probabilities P 1[in Equation (5.211)]over the next events <strong>and</strong> finally, the expectation over the next flight is taken according tothe density T(P,P'). The transformations of the estimators to be derived below are based onthe fact that several r<strong>and</strong>om functions may have the same expectation with respect to a givendistribution. In the following theorems, recipes are given for the generation of r<strong>and</strong>omfunctions with identical expectations.Theorem 5.15 — Given a function g(P,P') of deterministic coordinates P <strong>and</strong> a r<strong>and</strong>omvector variable P'. If the r<strong>and</strong>om coordiantes P' are distributed according to the densityfunction F(P,P'), then with an arbitrary function X(P,P 1,P'), the r<strong>and</strong>om functiong(P,P') = dP F(P,P 1)X(P 1P 11POg(P,P 1V (IP 2F(P 1P 2)X(P 1P 11P 2) (5.214)has the same expectation as g(P,P'), provided the integrals in Equation (5.214) exist.Proof. The proof is elementary. Taking the expectation of g(P,P'), we havedP' F(P,P')g(P,P') = dP F(P,P,)g(P,P0dP'F(P 1P')X(P,P 11P')I IdP 2F(P 1P 2)X(P 1P 11P 2)dP, F(P 1POg(P 1P 1)If we insert F(P,P') = C 5(P 1P') or F(P 1P') = C n(P 1P'), then this theorem is applicable forthe construction of scattering <strong>and</strong> multiplication contribution functions that are transformedto the same expected scattering estimator f Fs[in Equation (5.208)] or expected multiplicationestimator [in Equation (5.209)], respectively.A special form of transformation (5.124) was first proposed by Maiorov <strong>and</strong> Frank-Kamenietzky 35<strong>and</strong> was generalized in Reference 26 to the form above. Obviously, thistheorem makes it possible to generate partially unbiased estimators that depend only on thestarting <strong>and</strong> end points of an intercollision flight (P <strong>and</strong> P', respectively), but are independentof the type of event in the collision terminating the flight. Indeed, putting F(P,P') = T(P,P')<strong>and</strong> g(P,P') = f(P'), the transformed estimator g(P,P') defines the partially unbiased setS{g,{0}" 0}. The commonly used estimators follow from this transformation. Nevertheless,for specific purposes (e.g., for the estimation of energy deposition or fission energy),reaction-dependent estimators are also required. A transformation for the general estimatorset in Equation (5.12) is defined in the following theorem.
22¾Theorem 5.16 — Given a set of unbiased estimators S(O 1IgJ^L 0}, iet X 1(P 5P 11P') (t•.!.1.. . i be arbitrary functions. Let a^P, P 1) (i = (¾,!...) be some functions that satisfy therelationsE a„(P,P,) = Pj(P 1) j = 0,1,... (5.215)i -- 0where the probabilities P 1are introduced in Equation (5.211). Then the transformationI 1( W = JdP 1JmP 1)X 1(P 1P 1,?') Ea 11(P 5P 1Jg 1(P 5P 1) jJdP 2T(P 1P 2) X 1(P 1P 1.P 2)P 1(P 2)} (5.216)yields a partially unbiased estimator set, S{0,{g,}* „}, provided the integral in Equation(5.216) exist.Proof. It is to be shown thatI 1(P) - I dP'T(P 5P') E p,(P")g,(P,P')•>i=--0= fdP'T(p,p') i P 1(P^g 1(P 5P') ^ I 1(P)Multiplying Equation (5.216) by T(P,P')p.(P'), integrating with respect to P', <strong>and</strong> summingover i yieldsI 1(P) = JdP 1T(P 5P 1) V V H 1ZP 5P 1Jg 1(P 5P 1)-' j=0 i = 0where the integral in the denominator of Equation (5.216) has dropped out the same wayas in the proof of the previous theorem. Making use of Equation (5.215), we haveas stated.I 1(P) = JdP 1T(P 5P 1) E P 1(PJg 1(P 5P 1) - I 1(P)j-0Note that it was assumed in the derivation that the order of summation in the doubleseries can be interchanged. This would necessitate some further assumptions on a n; however,in practical cases, the summation is never extended to infinity (the upper limit equals THEmaximum number of progenies in a multiplication) <strong>and</strong> this problem vanishes.The simplest way to satisfy Equation (5.215) is to choose a 8as3,,(P 1P 1) = 'O 1(P 1P 1)P 1(P 1) (5.217)
230 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationswith some D 1that satisfy2 b,(P,P,) = i (5.218)1 = UCombining the results of the theorems above, it is seen that given a partially unbiasedestimator set S{G,JGJ^ 0}, a new set of estimators S{G,{G,}^. 0} can be generated by transformingg (the score in a flight) according to Equation (5.214) <strong>and</strong> the reaction-dependentscores gj with the aid of Equation (5.216).For the sake of completeness, we show that any partially unbiased estimator is thetransform of the simplest estimator f(P').Theorem 5.17 — If 8{0,IgJfL 0} is a set of partially unbiased estimators, then thereexists a transformation of the form in Equation (5.216) that brings the basic estimatorSIO.F.F.IFJ^JINTOSIO.IG^J-Proof. It is to be shown that there exist functions X 1(P 5P 1,?') <strong>and</strong> ^(P 5P 1) (i = 0,1,...) suchthat&(P,P') =/dP^KP^OXXP^^PVB^P,?,)^,)/JdP 2T(P 5P 2)X 1(P 5P 11P 2)P 1(P 2) J (5.219)where the b ;'s are related to the quantities in Equation (5.215) asb,(P.P.) = 2J=Oa.,(P,P,)<strong>and</strong>2 b,(P,P,) = 1i=0Simple substituions shows that if the g2s form a set of unbiased estimators, then they followfrom transformation (5.219) by puttingX,(P,P,.P') - gi(P,P')<strong>and</strong>b,(P,P,) = dP'T(P 5P') g l(P,P') P i(P')/ dP'T(P,P')f(P')•Finally, a trivial feature of the partially unbiased estimators is stated.
Theorem 5.18 — Any linear combination ofpartially unbiased, provided the Smear combinatu i> « .S{G' K '{{G 1' K, }R,.„} (K - 1,2 N) are sets of partialb -nb-tIn the following Section, the commonly used estimators are introducedformation of the weighting function f(P).B. COMMONLY USED ESTIMATORSThe simplest unbiased estimator was seen to be the weighting function f(Prate (5.2). The estimator is called the collision estimator <strong>and</strong> it scores f(Pjpoints Pj. If one is only interested in an unbiased estimate of the reaction r a < \,of the computational effort involved, then this estimator serves the purposeis no reason to seek other possible contribution functions. In practical case'amount of computation necessary to reach a given accuracy is almost as im.x<
232 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> CalculationsThis means that the set S{0,f/c a,0,{0}„0, ,} is also partiallyunbiased <strong>and</strong> it scoresf(P')/c a(P') in an absorption at P' <strong>and</strong> zero in any other reaction.Similarly, the whole estimation procedure can be assigned to any of the various possiblecollision events, the probability of which is different from zero. Thus, by puttingX 1(P 5P 1,?') =8(P 1-P')<strong>and</strong>b,(P,P,) = 8,. kwe haveg,(P,P') =o,. kf(P')/ Pk(P')where, according to Equation (5.211), p, = c %<strong>and</strong> p„+, = ^q n(n = 1,2,...) <strong>and</strong> thetransformed estimator scores in scatterings if k = I <strong>and</strong> in n-fold multiplications if k -= n+ 1.The opposite statement is also true: given a set of reaction-dependentestimatorsS(Q 5JgJO 0}, there exists a transformation which makes the estimation procedure independentof the type of collision, i.e., that results in a set of the form S{0,{g}*, 0}. To see that, letus again chooseX 1(P 5P 11P') = 8(P 1-P')<strong>and</strong> let3,/P 1P 1) = P 1(P 1)P 1(P 1)Then, from the transformation in Equation (5.216), we obtain the new estimatorsg,(P,P') - S P 1(POg^P 1P') - g(P,P')independently of i. Such estimators are called composed estimators. g(P,P') is the expectationof the estimators g;(P,P') over the possible postcollision events. Substituting the reactionprobabilities in place of p ;according to Equation (5.211), <strong>and</strong> the original estimators accordingto Equation (5.212), the composed estimator readsg(P,P') = f(P,P') + c.(P')f„(P') + C 8(P^UP')+ Cr(PO S q„(P0f,:„(P0 (5.221)11 -1Since g(P,P') is independent of the type of events, the estimator set S{0,Jg) 1^0} is equivalentto the estimator set S{g,{0}(. „}, which scores g(P,P') in a flight from P to P' <strong>and</strong> zero inany other event. (Equivalence again means the equality of the expected scores with possiblydifferent variances.) The commonly used estimators are of the type S{g,{0}(2 0}, <strong>and</strong> in whatfollows they will be derived from the collision estimator f(P') through the reaction-independenttransformation of Theorem 5.15, Equation (5,214).
233Let us consider transformation (5.214) with the estimator g(P,P,) = f(P,) <strong>and</strong> with thedensity function F(P,P 1) = T(P,P,):f(P,P') = dP T(P 1POX(P 1P 11POf(P 1)/ 4P 2T(P 1P 2) X(P 1P 11P 2)(5.222)The explicit form of the transition kernel is given in Equation (5.32) asT(P,P')dP' = o-(P')exp{ - dtcr(r + Uo 1E)IS(E - E')dE'dD - •Joif P' = (r + D
234 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationswhich gives the expected value of the score over the next flight from P. In a homogeneousmedium, if IfP 1) = f for D 1< L <strong>and</strong> zero otherwise, the expectation estimator scoresP 1XP)fflOn the other h<strong>and</strong>, if d in Equations (5,224) <strong>and</strong> (5.225) is the distance to the boundaryof the region, inside which the reaction rate is to be estimated, from the starting point Pinside the region, then 1'(D 1) = 0 if D 1> d <strong>and</strong> the transformed estimator scoresf(D) =f, :,(P,P')I(P)/[ 1 -0eififD =s dD > d(5.227)i.e., it gives a contribution independent of the site of the next collision point, provided thiscollision takes place inside the region of interest, <strong>and</strong> the score is zero if the particle leavesthe region. Combined with a nonanalog game which forces the particle to stay inside theregion, this estimator is used in the expected leakage probability method proposed byKschwendt <strong>and</strong> Rief. 20This method will be reviewed in Section 5.VIII.D.Let us now consider a function opposite to that in Equation (5.244), i.e., letX(D 1D 1) = a, if D ? d<strong>and</strong> zero otherwise. Then the transformation yieldsI(P)e T(d) if D 5= df(D) = f E2(P,P') = {0 if D < d(5,228)This estimator scores only if the free flight from P is longer than d. According to Theorem5.18, any normalized linear combination of the estimators in Equations (5.227) <strong>and</strong> (5.228)is also partially unbiased, i.e., for arbitrary function a(P), the estimatorf sl(P,P') = a(P)f E1(P,P') + [1 - a(P)]f E2(P,P')is also partially unbiased. This estimator has the explicit formf SI(P,P') = Ia(P) x(P 111P') + [1 - a(P)]x(P\P d)[e T
235The general form of track-length estimators is obtained from the transformation inEquation (5.223) by puttingX(D 5D 1) = a if D 1> D<strong>and</strong> zero otherwise. In this case, the transformed estimator in Equation (5.223) becomesf(D) = f T(P,P') =JoDdD,f(D,)T(D 1)/dD,T(D,)(5.230)Iu 1With the explicit form of the transition kernel, it is writtenf T(P,P') = I dD, f(r + D.w.EMr + D 1W 1E) (5.231)Again, in a homogeneous medium, if f(P,) = f for D 1< L <strong>and</strong> is zero otherwise, the tracklengthestimator scoresf T(P,P') - fa • min(D,L)Hence, the score is proportional to that part of the flight length which lies inside the regionof interest. Obviously, the track-length estimator gives a contribution whenever a part of aflight is traveled in the region, irrespective of whether the next collision is inside or outsidethe region.The estimators obtained through transformations of the simplest estimator f(P) in thisSection were all introduced by heuristic arguments during the long history of the transport<strong>Monte</strong> <strong>Carlo</strong> methods. Several other special estimators occasionally used in practice are alsospecial cases of the transformation (e.g., the special track length-type estimators proposedin Reference 42). The transformation, however, may also provide new estimators which donot follow from obvious heuristic reasoning. For example, consider the estimator which isthe track length-type transform of the expectation estimator. Inserting the expectation estimatorI(P) in place of f(P) in Equation (5.230), we obtain a new estimator of the formf(D) = f TX(P,P') = 1(P)T(D) (5.232)Here, t(D) is the optical distance between P <strong>and</strong> P'. This estimator was called "trexpectationestimator" in Reference 26 since it is a hybrid of the track-length <strong>and</strong> expectation estimators.One may contemplate whether it unifies the advantages or the disadvantages of these estimators.It turns out that for light absorbers in optically not-too-small regions, it results ina lower variance than both the track-length <strong>and</strong> expectation estimators. For optically thinregions, it is much worse than any of them; otherwise, it resembles the track-length estimatorA very important point should be emphasized here. The estimators introduced in thisChapter were derived under the assumption that the transition kernel is normalized to unity.This assumption has been repeatedly exploited in the various forms of the transformations.It has been seen in Chapter 5.1.C that assuming a vacuum-equivalent black absorber aroundthe domain of simulation, the transition kernel can always be normalized to unity. Whenapplying the above estimators, this normalization should always be performed or, if forsome special reason (e.g., for the introduction of some special nonanalog game) it is notconvenient, the estimators must be used in their proper form, which accounts for the finiteprobability of an endless free flight. The respective formulas are derived in Reference 26.The variety of partially unbiased estimators, of course, has its own theoretical interest.
236 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> CalculationsNevertheless, from a practical <strong>Monte</strong> <strong>Carlo</strong> point of view, their usefulness lies in the factthat in different problems their relative efficiency is different. Investigation of the relativevariances of the estimators is postponed to Chapter 5.VIII. Nevertheless, in order to obtainsome insight into the main characteristics of the various estimators, the following Sectionis devoted to investigation of the variances of various estimators in a highly idealized transportmodel.C ANALYSIS OF VARIANCES IN THE STRAIGHT-AHEAD SCATTERINGMODELThe straight-ahead scattering model is a favorite tool of approximate analytical <strong>Monte</strong><strong>Carlo</strong> <strong>and</strong> transport theoretical calculations. In this model, the particles are assumed topropagate along a straight line <strong>and</strong> a collision may result in either an absorption or anemission of one or more particles with a direction identical to the direction of the incidentparticle. In nonmultiplying cases, it is also called the delta-scattering model. 42It is a modelone step simpler than the Fermi scattering model introduced in Section 5.11.1). Its mainadvantage is that most of the equations appearing in our treatment can be solved analyticallyin the straight-ahead approach; at the same time, the solutions reflect the basic characteristicsof the exact ones. We shall here consider the first <strong>and</strong> second moments of the score providedby the different estimators when the absorption rate is estimated in a finite homogenousslab.Let the particles start at x = 0 in a positive direction along the x axis <strong>and</strong> let the slabbe situated between x = 0 <strong>and</strong> x = X. Assume that the total cross section of the materialin the slab is unity, the probability of absorption is c a, <strong>and</strong> the mean number of secondariesper collision is c. Let the slab be surrounded by a purely absorbing medium of total crosssection1. We do not require that the medium be nonmultiplying; however, for the sake ofsimplicity, we assume that the nonmultiplying game equivalent to the multiplying processis applied (cf. Section 5.III.C). (Remember that for c < 1, it is equivalent to survivalbiasing.) Otherwise, the game is assumed to be analog. Then the expected score, accordingto Equation (5.86), satisfies the equationM,(x) = I dxV x xl [f(x,x') + cM,(x')]= I,(x) + cj dx'e- , x '-^M 1(X') (5.233)where f(x,x') is any of the partially unbiased estimators. As the absorption rate is to beestimated,R •--fxdxijj(x)c athe simplest estimator is the weighting functionf(x) - c aif O S x ^ X<strong>and</strong> zero otherwise. With this estimator, the expected partial score (the expected score in afree flight <strong>and</strong> collision) isI,(x) = c ae- (x '-*>dx' = c a[l - e- (X -*>] (5.234)
237The details of the solution of Equation (5.233) are given in Appendix 5C. It follows fromEquation (C.7) of Appendix 5C that the first moment in Equation (5.233) has the formM,(x) = c a[l - e- ( , - c , , x - x , ]/(l - c) (5.235)Thus, the expected absorption rate due to a starter at x = 0 isM 1(O) = cJl - e- ( , - c ) X ]/(l - c)The second moment of the score, according to Equation (5.92), is the value at x -the solution to the equation0 ofM 2(x) = j dx'e- (x '-" x) f 2 (x,x') + 2c j dx'e" (x ' »f(x,x')M,(x')+ C 2 J dx'e ~ M 2(x')As is shown in Appendix 5C, the solution of this equation readsM 2(x) = I 2(x) + c 2 j dx'e- 0 -' 2 **'- "I 2(X') (5.236)Now let us consider the source term I 2of the second-moment equation with various estimators.1. The collision estimator coincides with the weighting function in the reaction rate, i.e.,f c(x') = c aif 0 =s x' < XWith this function, the source term becomesI 2c)(x) = c a[I,(x) 4- 2cj dxe~ (!5 '-' x) M i(x')]= c a[2M,(x) - I 1(X)] (5.237)The expectation estimator has the formf E(x) =I 1(X)<strong>and</strong> the source term readsIfYx) = I 1(X) • Ir(XVc 8= I 1(X)PM 1(X) I 1(X)J (5.238)The track-length estimator follows from Equation (5.230) asf r(x,x') == c., • min(x — x',X — x)<strong>and</strong> thereforeI 21Xx) = 2c a!I,(x) - c a(X - x)e" < x x ! -f K(x)l (5.239)
238 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> CalculationswhereK(x) == cf dx'(x' - x)e( x '- x > M,(x')]A little algebra shows thatK(x) = c a(X - x)e l X '- x ) - |(1 + c)l.(x) - M 1(X)]Zcwith which the source term becomesIf/>(x) - 2CjM 1(X) - I 1(X)Vc (5.240)4. Finally, the trexpectation estimator from Equation (5.232) takes on the formf TX(x,x') = I,(x)(x' - x)<strong>and</strong> the source term becomesI< TX '(x) = 2I 1(X)U 1(X) + K(X)]= 2I,(x)[M,(x) + c a(X x)e- ( X - x ) - I,(x)]/c (5.241)Now, it is apparent from Equation (5.236) that if for two estimators f a<strong>and</strong> f bthe sourceterms satisfylf\x)< If(X)for every x then the variance of the score with the estimator f ais smaller than that with theestimator f b. This fact will be exploited when comparing the merits of the various estimators.As a first observation, we note that according to Equation (5.234)c a-- I,(x)<strong>and</strong> therefore the collision estimator results in a greater variance than the expectation estimator.Comparing the collision <strong>and</strong> track-length estimators, it is seen thatK r) (x) / 2+ [e c ( X - x > - l]/c} for 0 « x « XAccordingly, the track-length estimator is more efficient than the collision estimator if c >1. Furthermore, if c < 1, for small values of X the RHS of the inequality is (1 + X - x)/2, i.e., for thin slabs, the track-length estimator is again more advantageous than the collisionestimator.
239In view of Equations (5.238) <strong>and</strong> (5.240), the track-length estimator is superior to theexpectation estimator ifI.,(x)[2M,(x) - I 1(X)] > 2CjM 1(X) I,(x)l/c<strong>and</strong> is inferior to it if the opposite relation holds. This inequality can be rewritten as(Cl 1- cJM, > (d,/2 - C 81)J 1Arguing quantitatively, we conclude that with an inctwith increasing slab thickness, the total expected scothe first-flight expected score, I 1(X), <strong>and</strong> therefore in ,•A 1 IUc < < I 'number of secondaries per collision, the track-length e li,m' , v ,i -i n.of the absorption rate than the expectation estimator.Finally, let us compare the track-length <strong>and</strong> trexpectationsource terms in Equations (5.240) <strong>and</strong> (5.241). The expectefficient ifI 1(X)[M 1(X) 4- c a(X - x)e/- ( X - x ) - I 1(X)] < CjM 1(X) ----- I 1(X)JAfter insertion of the explicit forms of M 1<strong>and</strong> I 1, the inequality becomes[1 - e" ( | - ^x-Vy(I - c) > [1 - e- ( X - x ) ]|X - x + 1]Obviously, for a sufficiently large number of secondaries<strong>and</strong> the expectation estimator is better than the track-len§for large c, the expectation estimator seems to be the most eriicieni oi all ih »r.e1 • >'not be more valuable than the above results, for the game investigated here is faig!The chief merit of the above analysis is that it gives a. picture of the metho• nreveal quite accurately the qualitative merits of the different estimators, <strong>and</strong> nccan be deduced from a more rigorous analysis as will be seen in Section5.Vui..u.VIL APPROXIMATE SOLUTIONS OF THE MOMENTEQUATIONSIt ts apparent from the results of Chapters 5.1 through 5.IV that theequations have at least as complicated a structure as the transport e» «equations may reflect adequately the main characteristics of the exact ,^wls^tiof great help in evaluating the efficiency of a <strong>Monte</strong> <strong>Carlo</strong> strategy < i *n • ' * vrelative merits of various methods.The approximate model should be sufficiently simple to make analytical or fast numerical1.
240 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationscalculation possible. The conclusions drawn from such approximate investigations are to bechecked in realistic <strong>Monte</strong> <strong>Carlo</strong> simulations. Two of the simplified transport models, theFermi scattering model <strong>and</strong> the straight-ahead scattering model, were introduced in Sections5.II.D <strong>and</strong> 5.VI.C, respectively. In this Chapter, a less idealized situation is considered <strong>and</strong>approximate solutions of the moment equations are established for monoenergetic, isotropic,homogeneous cases.Let us mention that besides the method discussed here, almost all the st<strong>and</strong>ard methodsof approximating solutions to the transport equation can be adopted for the approximatecalculation of moments. Thus, diffusion <strong>and</strong> S ncalculations have been successfully appliedfor <strong>Monte</strong> <strong>Carlo</strong> moment calculations.'- 16 - 4 'A. THE SIMPLIFIED MODELLet V be a simply connected convex region containing a homogeneous medium. Considera monoenergetic transport process in V with isotropic postcollisional direction distributionin the laboratory system. In this model, every reaction rate is proportional to the expectednumber of collisions in the region; therefore, we shall assume that the latter is the quantityto be estimated by <strong>Monte</strong> <strong>Carlo</strong>. This means that the weighting function, f(P), in the reactionrate is unity inside V <strong>and</strong> vanishes outside, i.e., the reaction rate readsK J dPi)j(P) (5.242)The kernels describing the transport model above have the formsT(P,P')dP' = e M T J M W - co'Kko' (5.243)<strong>and</strong>C(P',P")dP" = — do' (5.244)4TTwhere P = (r.co.i P' = (r + Dw,w), <strong>and</strong> T = crD is the optical distance between P <strong>and</strong>P' along to. D is the corresponding geometrical distance, 0 (5.246)where n is the inward normal to S. Finally, we suppose that the score moments due to aparticle started from outside V is zero, i.e.,M r(P) = 0, if r j V U SThis assumption can be interpreted in two ways. Either it is assumed that the region is
241surrounded by a black absorber <strong>and</strong> there is no return from outside V, or the particles enteringV are assumed to be independent of any particle previously left V <strong>and</strong> they are thought tobe part of the uniform surface source in Equation (5,246). The assumption will be relaxedin Section D by introducing an albedo-type quantity that accounts for the returning particlesThe present form of the model allows us to examine the score moments in V without regardto the surroundings.B. THE SEPARATION ASSUMPTIONIt is well known from transport theory that even in the specialized modea very limited number of problems can be exactly solved, <strong>and</strong> these solutionsmathematical foundations. Therefore, some further approximation is to beorder to obtain an easily treatable method of solution. The approximation is firstin the case of the analog first-moment equationM 1(P) = I 1(P) + JdP' T(P, P') JdP"C(P\P")M,(P")where, when the collision rate in Equation (5.242) is estimatedI 1(P) =j dP'T(P.P')JvWith the kernels in Equations (5.243) <strong>and</strong> (5.244), the moment equation takes on the form/•D(P)crM 1(P) = 1 - e~ a W n + o- dD e~«*> _ d*»'M,(r + Dw,') (5,247)Jo4 Tf Jwhere D(P) is the geometrical distance of the surface S from the point P along
242 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> CalculationsLet us now consider the case of a volume source. Multiplying the equation by Q V(P)in Equation (5.247) <strong>and</strong> integrating with respect to P, the resulting equation readswhereM., = I 1+ — j dP J dTe- 1 — Idto'M.ir + Dio.co') (5.248)4"frv JV Jo 4TT JM, =T4'JTV J<strong>and</strong>lT idPM,(P) = R (5.249)= 4^V I D P I ' ( P )The last <strong>and</strong> most important approximation in our model is that M 1I -P") in Equation (5.248)is replaced by its average value M 1in Equation (5.249). Doing so, Equation (5.248) becomesM 1« I 14 CP 1M 1i.e.,M 1= I 1Z(I - cP c) (5.250)wherep=_L Jd PI ci're' T = IdP[I - e~ t r , w ]4irV Jv Jo 4TTV JV= — dr dw[l - e-" D fr^] (5.251)4LTV JV J4-HP cis the first-flight collision probability 8in V. More precisely, P, is the probability that aparticle started in V from an isotropic, uniform distribution suffers its next collision in V.The approximation above is called the separation assumption, referring to the fact that theaverage of a product is approximated by the product of the separate averages. It can be seenthat in the simple form above, the separation assumption Is equivalent to the assumptionthat the collision points are uniformly distributed over V. An analogous approximation wasintroduced through an invariance principle by Stuart 44for escape probability calculations.Note that the first-flight collision probability P cfor a body of a given shape is a uniquefunction of the optical mean chord lengthT = a? (5.252)in the body, 8whereI = 4v/Sis the geometrical mean chord length.
243In the case of the collision rate estimation, the source term, of the first-moment equationI, in Equation (5.248) equals the first-flight collision probability, I 1= P c<strong>and</strong> hence theexpected total score in Equation (5.250) readsM 1= R = P c/(1 - cPJIn the case of the surface source, Equation (5.246), the expected total score duincidentparticles isM 1= —^dPM 1(P)<strong>and</strong> it is similarly approximated asM « I 1+ CP 1M 1(5.254)where<strong>and</strong>1 f f D(P)2-rrSIt can be seen 8that P Cis the probability that a neutron incident isotropically ion the surface of V will suffer its next collision in V, <strong>and</strong> it is related to tcollision probability P CasP c= T(I - P c)Inserting Equation (5.250) into the RHS of Equation (5.254), the expected total score dueto the surface source becomesM 1- I 1+ I 1TC(I - P c)/(1 - cP c)Again, for collision rate estimation, I 1= P C, I 1= P c, <strong>and</strong>M, « f(l ~ PcV(I - cP c) (5.256;In the expressions of the approximate total score, Equatiof the first-flight collision probability P Cappears, whose
244 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> CalculationsIn the case of a general monoenergetic moment equation, the separation assumption willbe used in the following formdPCA(P) JdP'T(P,P')A(P,P') JdP"C(P',P")M(P")dr dw dTe ~ T A(r,w;r + Dw,w)c(r + Dw) M (5.257)Where we put X = V, a x= 1/4-rrV for a volume source <strong>and</strong> X = S, a x= 1/2-rrS for asurface source. A(P,P') is some given function, c(P) is the mean number of secondaries percollision at P, <strong>and</strong> M st<strong>and</strong>s for the total score moment in questionM =4TTV JdPM(P)C. ON THE QUALITY OF THE APPROXIMATIONThe form of the separation assumption as introduced above suggests that it may onlybe used in monoenergetic, isotropic transport in bodies of more or less regular shape.Although the assumption might be generalized to more realistic cases, such a generalizationdoes not seem to offer any advantage, for two reasons. First, in complex problems, theevaluation of the integrals on the RHS of Equation (5.257) would be almost as laborious asthe application of more precise deterministic solutional schemes. Second, the approximationsproposed here are primarily intended for semiquantitative (<strong>and</strong> usually comparative) analysisof various <strong>Monte</strong> <strong>Carlo</strong> methods <strong>and</strong>, except for very special cases, such an analysis canbe performed on elementary transport problems with satisfactory results.Therefore, when judging the quality of the approximation, the most meaningful questionis, how well does Equation (5.253) approximate the exact collision rate of monoenergeticparticles in a homogeneous medium with isotropic scattering? In other words, what can besaid about the difference of the exact <strong>and</strong> approximate solutions'? Extensive numerical testsshow 31that the approximate <strong>and</strong> <strong>Monte</strong> <strong>Carlo</strong> values of collision rates <strong>and</strong> related quantitiesare in very good agreement for a not-too-high number of secondaries per collision (c < 1),<strong>and</strong> the approximation consistently underestimates the exact collision rates.Although no general proof has so far been found, the following arguments make it morethan probable that underestimation is an inherent feature of the approximation. Let usintroduce the following notationsM 1(r) =-- ~4irJdCoM 1(P)<strong>and</strong>I ,Or) = •— Idw IdP'T(P.P') = —- ldc*[l e" < r D < H "4ir J •'• 4TT JThus, from Equation (5.251), the first-flight collision probability readsPc == ~ jdrl,(r) (5.258)
245Integrating the first-moment equation (5.247) with respect to co we have, withr - Ir' - r/to + RM,(r) = I,(r) + — dcocr dr'-r|e "" cr|r ''"" r| cM ](r 4-wlr'-r|)4TT J JV 'or substitutingdwd[r'—r| = dr'/|r'--r| 2the moment equation becomesM 1Or) = I,(R) + c dr'G(r,r')M,(r') (5.259)whereG(r,r') = G(R',R) = — e-'^'-^/lr'-r| 24TTAccordinglyJ 1Cr) --= Jdr'G(r,r') - [dr'Gtr' r) (5.260>The solution of Equation (5.259) is written in the Neumann series fromM,(r) = £ c*~'I k(r) 15.261;whereI K + 1(R) = DR'G(R,R')I K(R') (5,262)Finally, denoting P 1= P c<strong>and</strong>JvP k= 7 VJ ydrl t(r) (5.263)it follows from Equations (5,261) <strong>and</strong> (5.263) that the. total expected score becomesM 1= ^ E-'P k(5.264:k= iNow this quantity is approximated in Equation (5.253) asM 1« 2'P"
246 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> CalculationsObviously, if one proves that I\:- P L = P,, then it is also established that the approximatecollision rate underestimates the exact one. For k = 2-n, it follows from Equations (5.263)<strong>and</strong> (5.264) thatVDRLF(R)Vdr I 11(D= Pf 1Repeated use of this inequality yieldsP k5= P\for k = 2' (i = 1.2,,..). For values of k different from powers of two, the inequality hasnot yet been established; nevertheless, it seems reasonable to assume that it holds for everyinteger k. Based on these arguments <strong>and</strong> on numerical results, we consider the separationassumption as an approximation safely underestimating the collision rate, i.e.,M 1P c./(i - cPjExperimental <strong>and</strong> approximate collision rates for various bodies <strong>and</strong> dimensions are comparedin Figure 5.3 as functions of the mean number of secondaries. 31It is seen that up to aboutc = 0.8, the agreement is excellent in all the cases studied. The error in the approximationincreases slowly with increasing dimensions <strong>and</strong> drastically with an increasing number ofsecondaries.Finally, we note that a rough overestimation of the collision rates in the simplified modelfollows from the fact that the first-flight collision probability is greater than the multiplecollision probabilities P n<strong>and</strong> all are less than unity. Therefore, it follows from Equation(5.264) thatM 1« P c/(1 - c)The separation assumption will be repeatedly exploited in approximate comparison of thevariances <strong>and</strong> efficiencies of various estimators <strong>and</strong> procedures.I). EFFECT OF SURROUNDINGSIn the introduction of the separation assumption, we have supposed that a particle thatleaves the region V will not re-enter it. If we introduce an albedo-type quantity that accountsfor the particles returning due to the escape of one particle, approximate solutions also canbe established for such moment equations, the exact solution of which effectively dependson the surroundings of the region considered. Based on the formalism of Amouyal <strong>and</strong>Benoist, 2an approximation to the number of collisions in a region is proposed by Maiorov<strong>and</strong> Frank-Kamenietzky 35which turns out to be a special case of the separation assumption.A short description of the formalism to be used for general moment equations is givenbelow, along with an application to the estimation of the number of collisions.Let the moment equation at h<strong>and</strong> be of the formM(P) - I(P) + JdP"L(P,P")M(P")<strong>and</strong> assume that the source density to be used in the calculation is a linear combination ofvolume <strong>and</strong> surface sources of the form in Equations (5.245) <strong>and</strong> (5.246):Q(P) = (1 - a)Q v(P) + aQ s(P) (5.265)
247FIGURE 5.3. Collision rates in various bodies of characteristic dimension R as a function of the mean numberof secondaries e. Continuous line: exact values; broken line with circles: approximation by Equation (5.253). (Fea slab of R = 0.1, one half of the rate is plotted.)
248 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> CalculationsLetM v= dPQ v(P)M(P) -- - ½ dPM(P)J4TTV Jv<strong>and</strong>M S= JdPQ 5(P)M(P) = ~ JdPM(P)Similarly, denoteLv - ^ [dP J vdP"L(P,P"), I V= ^ (dPKP)<strong>and</strong>Ls" i J"? J/P"L(P,P"), Is = ^ JdPKP)Then, according to Equation (5.257), the total scores due to the volume <strong>and</strong> surface sourcesbecomeMv ~ I v/(1 - L v)<strong>and</strong>M 8~ l s+ L SM V= I 8+ L sI v/(l - L v)respectively. Now, since the total expected score is the linear combination of the sourcewisescoresM = JdPQ(P)M(P) = (I - a)M v+ aM stherefore, with the explicit forms of M v<strong>and</strong> M 8, we have the approximate solution:M = [I- a(l - L 4)]I V/(1 - L v) + cd s(5.266)This approximation is only useful if one knows the ratio of the volume <strong>and</strong> surface sourcedensities. On the other h<strong>and</strong>, assuming that the physical source of the particles is situatedentirely inside V <strong>and</strong> the surface source is due to particles reentering it after an escape, theparameter a can be fixed <strong>and</strong> the effect of the space surrounding V can be accounted for.This is demonstrated by the following.Let N" be the number of particles escaping from region V (per unit time) due to aphysical source that produces N vparticles in V (per unit time). Let the number of particlesentering V be N s<strong>and</strong> assume that N sis proportional to NN 8- FN- (5.267)
249The quantity F characterizes the surroundings, <strong>and</strong> in simple geometries it can be relatedto the collision probability P c. Obviously, it defines the number of particles entering V dueto one particle leaving it. Now the particles representing the effective volume source in theregion originate either from the physical volume source or from collisions in V, i.e.,N E= N v+ cR (5.2681where R is the number of collisions in V. On the other h<strong>and</strong>R = P CN E+ P 6N 8(5.269)for the obvious reason that the collisions occur either because a particle emerges from theeffective source N E<strong>and</strong> suffers its next collision in V or because a particle just returning toV suffers a collision in it. P c<strong>and</strong> P -are the collision probabilities defined in Section B.Finally, the number of escaping particles is expressed asN- = (1 - P C)N E+ ( 1 - P C)N S(5.270)The solution of the algebraic equation system [Equations (5.267) through (5.270)] is thefollowing:R = [P c+ HP C- P C)]N V/{1 - T(I - P c) - IP, 4- F(P C- P c)]c} (5.27nN s= [1 - T(I — P C)]N V/{1 - F(I - P c) - [P c+ F(P C- Pc)C}<strong>and</strong>N E= T(I - P C)N V/{1 - T(I - P c) - [P 8+ r(P c~ P c)]c} (5.272)It can be easily seen that in the derivation of the results above, the separation assumptionhas been implicitly used. This is also seen from the fact that by putting T ~ 0, Equation(5.271) reduces to Equation (5.523).The relation among the number of particles originating from the surface <strong>and</strong> volumesources Is defined by Equation (5.272). Hence, the parameter a in the expression of thesource density in Equation (5.265) becomesa =-- N S/(N S+ N v)= T(I - P c)/{1 - [P c+ F(P C- Pj]c}In conclusion, if the albedo value F representing the effect of the surroundings on theparticles' distribution is known, Equation (5.266) gives an approximate expression of thetotal collision rate in the monoenergetic, isotropic, homogeneous model. The approximationbecomes exact in purely absorbing medium <strong>and</strong> is expected to yield reasonable results tormoderate values of the mean number of secondaries per collision.VIII. ANALYSIS OF SECOND MOMENT EQUATIONSThe elaboration of the theory of moment equations was mainly motivated by the factthat with the aid of the equations that describe the second moment of the score, the. varianceof specific games, estimators, or biasing schemes can be qualitatively <strong>and</strong>, to some extent,
25!) <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationsquantitatively analyzed. It has been mentioned that there is little hope of finding exactsolutions to the second-moment equations in general, but very often we are only interestedin the relative merits of some procedures, i.e., we intend to decide whether a particulargame results in lower variance than another game. Usually, this can be done without effectivelysolving the equations. On the other h<strong>and</strong>, in certain applications, approximatecalculation of the variances (e.g., by the method proposed in the previous Chapter) givessufficient practical information.The theoretical variance of a game is connected to the score moments as follows. LetMj(P) be the i-th moment of the score due to a unit weight starter at the point P in thenonanalog game in question. Let Q(P) be the source density of the starters <strong>and</strong> letW(P) =Wbe the statistical weight of the starter from P. Obviously, the expected final estimate isdP Q(P)WM 1(P)<strong>and</strong> the variance of the estimate isD 2 [R] = JdPQ(P)W 2 M 2(P) -RIn this Section, zero-variance <strong>Monte</strong> <strong>Carlo</strong> schemes are first reviewed. Such schemesresult in final scores which have no statistical fluctuation, i.e., every history yields the verysame final score. Conditions are established in Section B under which the variance of afeasible game is bounded. Variance reduction capabilities of nonanalog games in general<strong>and</strong> of special biasing schemes in particular are investigated in Sections C <strong>and</strong> D, respectively.The variance <strong>and</strong> efficiency of the equivalent nonmultiplying game are examined in SectionE. Minimum-variance partially unbiased estimators are derived in Section F. Comparisonof the variances of partially unbiased estimators is followed by the derivation of a new,effective, self-improving estimator. Some remarks concerning the effect of variance reductionon the efficiency of a game in general conclude the analysis of the second-moment equations.Finally, optimum biasing of the source density is addressed.A. ZERO-VARIANCE SCHEMESDiscussion of a <strong>Monte</strong> <strong>Carlo</strong> scheme that has no statistical error seems absurd sincesuch a game would give an exact answer in one history, i.e., in a quasideterministic way,while, in general, <strong>Monte</strong> <strong>Carlo</strong> is used only in cases where deterministic methods fail towork. It will be seen below that the suspicion concerning the practical feasibility of suchgames is justified indeed. Nevertheless, besides their theoretical interest, such games dohave practical importance in the sense that they represent the "best of all" <strong>Monte</strong> <strong>Carlo</strong>games that, in principle, can be arbitrarily closely approximated, <strong>and</strong> their structure indicatesthe directions of the approximations.Zero-variance schemes were first derived through a special importance sampling procedure,<strong>and</strong> these schemes involve last-event (absorption) estimators. 1218Zero-variancebiasing schemes with a collision estimator were introduced by Ermakov 10 <strong>and</strong> Hoogenboom. 14Schemes with arbitrary partially unbiased estimators were derived from the moment equationsby Dwivedi 9 <strong>and</strong> were generalized by Gupta. 13Both derivations concern nonmultiplying games. One might think that the form of theestimator is irrelevant if it is about a zero-variance game. This, however, is not so sincethe practically realizable games may only be approximations of the ideal one <strong>and</strong> will
251therefore result in finite variance. In this case, the form of the estimator will, in turn,influence the resulting variance.In the first part of this section, we define the kernels of a general multiplying, partiallyunbiased nonanalog game that results in pointwise zero variance, i.e., that define a gamein which the scores in a history depend only on the starting point of the history, but areidentical for every starter from a given point. Then we introduce a nonanalog source densitythat, together with the pointwise error-free game, yields a zero-variance estimate of thereaction rate in question. The schemes proposed in the works referred to above are specialcases of the game to be derived here.In the derivation below, the estimators will be fixed <strong>and</strong> nonanalog kernels leading tozero variance will be determined. The opposite way, i.e., derivation of suitable contributionfunctions with fixed kernels, seems equally reasonable <strong>and</strong>. indeed, it will be seen in SectionF that for any analog game, partially unbiased estimators exist that yield zero variance.For the sake of simplicity, let us assume that scores result from intercollision flightsonly, i.e., that the estimator used in the simulation is of the form S{f,{()}}. Without loss orgenerality, we can write the analog collision kernel in the formC(P',F') - c a(P')&(P"-P) + V nc„(P')C 11(P',P")n= )where C 11(P') is the probability that n secondaries are emitted in a collision at P' <strong>and</strong> thedensity function of the postcollision coordinates in an n-foid multiplication is C n(P' ,P") itis easy to see that by choosingC 1(P') -- c s(P') +CXPOq 1(P')C n(P') - c,(P')q n(P')<strong>and</strong> replacing C 1(P',P") in Equation (5.74) by[c s(P')C 5(P',P') 4- C 1(POq 1(POC 1(P',P")]/ Cj(P')the collision kernel in Equation (5.74) (for an analog game) takes on the form proposedhere. Similarly, let us write the nonanalog collision kernel (to be determined below) asC(P',P") - c a(P')8(P"-~P) + E "C n(POC 11(P',P")O = 1Consider an analog game with the estimator f(P,P') S= 0 that results in the required expectedscore. The first moment of the analog game is governed by the equationM 1(P) = fdP'T(P,P')f(P,P') + jdP'T(P,P0 E HC N(POJDFC n(P^)M 1(P"). (5.273)Now, let H(P,P') <strong>and</strong> H n(P') be (for the moment) arbitrary functions. Simple manipulationsyield a first-moment equation equivalent to Equation (5.273):M 1(P) - JdP'T(P,P')|f(P,PO + E nc„(P')[l - H(P 1POH n(POIm 11(PO}+ jdP'T(P,P')H(P,P') E Rc n(POH n(POJdFC 1 1(POF)M 1(P") (5.274)
252 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> CalculationswhereFh n(P') = dP"C n(P',P")M,(P") (5.275)This form of the moment equation will be used for the definition of the nonanalog zerovariancekernels below. Let us consider a nonanalog game played by the transition kernelT(P 1P') <strong>and</strong> by the collision kernel C(P',P") above. Assume that the analog contributionfunction f(P,P') <strong>and</strong> the weight generation rules in Equations (5.142) through (5.149) areapplied; then this game is partially unbiased. The second moment of the score due to astarter with unit weight at P reads, according to Equation (5,81), asM 2(P) =JdP'T(P,P'){(W') 2 f 2 (P,P')+ 2Wf(P 1P') 2 nc n(P') I C n(IVr)W nM 1(P")+ 2 1 H" - Dc n(P')dP" C n(P', F)W nM 1(P")dP'T(P 1P') 2 nc n(P') |dP"C n(P',P")(W;;) 2 M 2(P")n " 1J(5.276)where, in view of the weight generation rulesW = T(P,P')/f(P,P')(5.277)<strong>and</strong>W n- -W'c„(P') C n(P',P 1 Vc n(P') C n(P',P")(5.278)Equation (5.276) follows from Equation (5.81) by putting W == 1 <strong>and</strong>f. = f = f = 0Then, reordering the terms in Equation (5.81) according to the powers of f(P,P') <strong>and</strong> makinguse of the relation above of the quantities c t<strong>and</strong> C 1(i = 1,2,...) to the reaction probabilitiesc r<strong>and</strong> kernels C 1., Equation (5.276) is obtained. In the derivation, the identitiesCa(P) + E 4(P) = 1<strong>and</strong>dP"C,(P',P") = 1have also been exploited.The game will result in zero variance ifM 2(P) - [M 1(P)] 2
253i.e., ifM 2(P)/M,(P) = M 1(P) ¢5.279,Dividing Equation (5.276( by M 1(P) <strong>and</strong> making use of Equations (5.275), (5.277), <strong>and</strong>(5.278) in the first term in the RHS the equation becomesIM 2(P)M 1(P)] = JdP'T(P,P')|W'f 2 (P,P') + W 2 nc„(P')rn„(P')[2f(P,P'j + (n -l)c 11(P')m„(P')/c„(P')]|/M )(P)(WD 2 [M 2(F)ZM 1(P''), (5.280)where 0(P) may represent, at the moment, any function with which the RHS of the equationexists. A sufficient condition of Equation (5.279) is that the integr<strong>and</strong>s in the two terms onthe RHS of Equation (5.280) be equal to the respective integr<strong>and</strong>s in Equation (5.274). Forthe second term, it means thatPi(P') A M (P'7T(P,P') ^ 6„(P')C n(P',P") -^j (W n') 2-- T(P,P')H(P,P')c n(P')H„(P')C n(P',P")Inserting Equations (5.277) <strong>and</strong> (5.278) into the LHS, the equation is satisfied withf(P,P') = T(P 1P') e(P')/[H(P,P')M,(P)] (5.281:.<strong>and</strong>C n(P') C n(P',P") = c n(P')C n(P',P")M i(P")/[E(P')H n(P')J (5.282)for arbitrary functions 0, H, <strong>and</strong> H n. The first two functions are restricted by the requirementthat T(P,P') be normalized to unity. Accordingly|dP'T(P,P')9(P')/H(P,P') =M 1(P)Comparison to the analog moment Equation (5.273) shows that by choosingQ(F)ZH(P,P') = f(P,P') + 2 nc n(P') ldP"C„(P'.P")M )(P")Ii«iJthe normalization condition is satisfied. With the notation of Equation (5.275), it is rewrittenasB(P')/H(P,P') = f(P,P') -t- 2 nc„(P')m(P') = f(P,P') + M 1(P') (5.283)
254 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculations[Note that any partially unbiased estimator in place of f(P,P') would make T(P,P') normalized.This choice, however, will make the further derivation simpler.] Further restrictionson the functions so far undefined will follow below.It remains to ensure the equality of the first terms on the RHS of Equations (5.274) <strong>and</strong>(5.280) in order to meet Equation (5.279). The two expressions are certainly equal iff(P,P') + i nc n(P')m n(P')il - H(P,P')H„(P')IP(P 5P') + Vnc n(P')rn„(P')[2f(P,P')+ (n - l)c„(P')m n(P')/c„(P')]JwVM 1(P)(5.284)On the other h<strong>and</strong>, integrating Equation (5.282) with respect to P", we haveC n(P') = c n(P')rn n(P')/[H n(P')E(P')](5.285)while, according to Equation (5.281)W' = T(P,P')/f(P,P') =H(P 1POM 1(POZG(P')Inserting the last two equations into Equation (5.284), the equality to be fulfilled becomesf(P,P') + E nc n(P')S n(P')[1 - H(P,P')H n(P')3f(P,P')f(P,P0 + E nc n(P')m n(P0 H(P,P')/0(P')+ 2 nc„(P')Ff) n(P')[f(P,P0 + (n - l)H n(P0O(P0|H(P.P')/O(P0n-- 1Now in view of Equation (5.283), f(P,P') on the I.HS is equal to the first term on the RHS.i.e.. the equation to be satisfied is3 - H(P,P')H„(P') = [f(P,P') + (n - I)H n(P')0(P')]H(P,P')/8(P')for every n. Again from Equation (5.283), we obtain that this is equivalent to the equationH n(P') = M 1(POZnO(P') (5.286)whereM 1(PO - V nc n(P')m n(P') " DRC(P',P)M 1(P")(5.287)
255We have thus completed the construction of the nonanalog kernels that result in a gamewith pointwise (or, better, starterwise) zero variance. The transition kernel follows fromEquations (5.281) <strong>and</strong> (5.283) asT(P,P') = T(P 1P') [f(P,P') + M 1(PO]ZiVI 1(P) (5.288)The multiplication probability is obtained from Equations (5.285) <strong>and</strong> (5.286) asC n(P') = Hc n(POrO n(POZM 1(P') (1289)while the postcollision densities are defined by Equations (5.282) <strong>and</strong> (5.285) asC„(P',P") = C 11(P', F)M 1(FVm n(PO (5.290)whereTr) 11(P') =JdFC 11(POPOM 1(P")We note in passing that according to Equations (5.9) <strong>and</strong> (5.12), the transition kernel (5.288)can be expressed by the adjoint collision density iJf(P') asT(P 1P') = T(P 1POJf(P 1P') - f(P) +t|/*(P'Vi/M,(P)where f(P) is the weighting function in the reaction rate [Equation (5.2)] to be estimated.It is apparent that the absoiption probability in the nonanalog game is zero since1 - c a(P') = S C n(PO = S HC n(POfTl n(POZM 1(P') - 1.<strong>and</strong> the nonanalog kernels are normalized to unity. We have thus proved the following.Theorem 5.19 — Given an analog unbiased game with a nonnegative contributionfunction assigned to the intercollision flights. If one chooses the kernels of a nonanaloggame according to Equations (5.288) through (5.290), then the game with the analog contributionfunction will be partially unbiased <strong>and</strong> any starter will produce an estimate withzero variance.LJTwo comments are to be made here. First, since the kernels are defined through theexpected score which is unknown at the time of the simulation, such a game, of course,cannot be realized. Nevertheless, approximations to the kernels above may substantiallyreduce the resulting variance, as will be seen in Section 7.III. Second, the game so definedgives a zero-variance estimate of the reaction rate due to a starter from any source pointHowever, it does not garantee zero variance of the total score R unless the nonanalog sourcedensity is specifically chosen. Indeed, the variance of the total score readsD 2 IR] - JdPQ(P)W 2 Mf(P) JIdPQ(P)M 11(P)
256 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationswhere, according to Theorem 5.9W - Q(P)/Q(P)is the starting weight of the particle at P. Now, choosingQ(P)W 2 = Q(P)JdP-Q(POM 1(P-VM 1(P) -- Q(P)RM 1(P)we haveQ(P) = Q(P)M 1(PVR (5.291)<strong>and</strong> D 2 [R] = 0, i.e., this form of the nonanalog source density ensures a zero-varianceestimation of the reaction rate R.It is to be emphasized that the hypothetical game defined above is partially unbiased,i.e., it results in the same pointwise score per unit starter weight as the corresponding analoggame (<strong>and</strong> zero variance is reached by position-dependent starting weights). This is whythe considerations above are not only of theoretical interest, but can also be used for theconstruction of approximately optimum feasible games. In contrast to that, the zero-varianceschemes proposed in early works 1 2 1 8are based on a special importance sampling of anonmultiplying procedure with last-event estimators where both the starting weight <strong>and</strong> thefinal score of every starter are just the required quantity R, thus obtaining zero variance. Inorder to illustrate how importance sampling leads to zero-variance schemes, we give herethe outlines of the classical derivation in terms of the moment equations.LetdPf(P)u)(P)be the reaction rate to be estimated in a nonmultiplying game. We have seen in Section5.1.A that the simplest first-moment equation that describes this problem readsM 1(P) = JdP'T(P,P')[f(P')+ JdP'C(P',P') M 1(F')]Let us introduce functions asU(P') = f(P') +JdP'C(P',P")M,(P')<strong>and</strong>V(P) = JdP'T(P,P')U(P'):: M 1(P)According to Equations (5.151) through (5.153), U(P') <strong>and</strong> V(P) define an importancesampling procedure which is governed by the transformed kernelsT(P 1P') = T(P,P')U(P')/M,(P) (5.292)
257<strong>and</strong>C(P',P") = C(P'.P")M,(P")/U(P') (5,293)Recalling the relation between the score moment <strong>and</strong> the adjoint collision density j Equation(5.12)] ^M 1(P) =dP'T(P,P')vji*(P')it is seen thatU(P') = f(P') +dP"K(P',P")M**(P")i.e., by Equation (5.9)U(P') = **(P') (5.294)<strong>and</strong>f(P.P') =T(P,P')»|i*(P')/M l(P)The absorption probability in the transformed game isc a(P') = 1 - JdF'C(P',P") = f(P')/U(P')In view of Theorem 5.10, the transformed game with a last-event estimator is unbiased ifthe transformed contribution function satisfies the equationU(P')6 a(P')f(P') = f(P')i.e., iff.(P') = 1Furthermore, if the source density <strong>and</strong> the starting weight in the transformed game areQ(P) = Q(P)V(P)/JdPQ(P)V(P) =Q(P)M,(P)/R<strong>and</strong>HRrespectively. Since the game is assumed to be feasible (in a theoretical sense), the probabilityof an endless history is zero, i.e., sooner or later every particle is absorbed, scoring exactlyunity in every history. This means that the expected score due to a unit weight starter isunity in every transformed history. [The same follows from Equations (5.156), (5.292), <strong>and</strong>(5.293) since the first-moment equation of the transformed game readsJl 1(P) = JdP'T(P,P')[f(P')/M,(P) + JdP"C(P',P")M,(P")Jl 1(P")/M ](P)|
258 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationswhich has the unique solution M 1(P)the final score in every history is1.] As every starter of unit weight scores unity <strong>and</strong>WM 1(P)= Rthe variance of the final estimate is zero. It is interesting to note that the form of thetransformed source density is in fact, immaterial since the final score of every starter isidentical.Quasi-optimum biasing schemes derived from the ideal zero-variance procedure will beconsidered in Chapter 7.III.B. ON BOCM)KI)NFSS OF THE VARIANCETheorems 5.7 through 5.9 in Sections 5.V.A <strong>and</strong> B establish conditions under which anonanalog game yields the same expected score as the analog game. We have also seen inSection 5. V. G that any nonanalog game that corresponds to a feasible analog game <strong>and</strong>satisfies the conditions of the theorems above is also feasible in the sense that the probabilityof an endless history is zero. From a statistical point of view, however, a game in whichthe second moment of the score is not bounded is dangerous since, in general, there is noguarantee that, by increasing the number of histories, the empirical mean of the estimatestends to the expected value of the quantity in question. (Nevertheless, in special cases it ispossible to construct games that give reliable estimates with unbounded variance. This matterwill be discussed in Section 6.1V in connection with the estimation of the particles" flux atgiven points.) In reaction rate estimation, the boundedness of the second moment (variance)of the score is generally almost as important a requirement as the feasibility of the game.Let us consider a partially unbiased multiplying nonanalog game that corresponds to afeasible analog game. The second moment of the score due to a unit weight starter from Psatisfies Equation (5.81), which, by making use of the weight generation rules in Equations(5.142) through (5.149), can be written in the formM 2(P) = I 2(P) f dP"i£(P,P")[M 2(P") - M 2 (P")] (5.295)withi£(P,P') = dP'T(P,P')w(P,P') c s(P') dP"C 5(P',P")w s(P',P")(5.296)<strong>and</strong>,P') W(P 1PO[P(PJP') + 2f(P,P')?>,(P') + 9- 2(P')] (5.297)where5F 1(P') = c„(P')f a(P') + c s(P') dP"C 8(P',P")[f s(P',P") + M 1(P")]+ C 1(P') V nq„(P') dP"C n(P',P")[f„(P',P") + M 1(P")] (5.298)
259<strong>and</strong>3J 2(P') = c a(P') W 11(P') ff(P')+ c s(P')JdP"C s(P',P")w s(P',P")[f s(P',P") + M 1(P")] 2+ C 1-(P') 2 nq n(P')fdP"C n(P',P")w„(P',P")[f n(P',P") + M 1(P")] 2+ C 1(P') S n(n - Dq 1 1(POw 0 1(P')! |dP"C n(P',P")lf„(P',P') + M 1(P")]}"The weight factors in Equations (5.298) <strong>and</strong> (5.299) are those defined in the weightrules of Theorem 5.8, i.e.,w(P,P') = T(P,P')/f(P,P') (5.31505w a(P') = c a(P')/c a(P')(5.3Oi)w s(P') = c s(P')/c s(P') (5.302)w s(P',P") = w s(P')C s(P',P")/C s(P',P") = w s(P')w c(P',P") (5.303)w f,(P') = cXP')q n(P')/6 ((P')q n(P') (5.304)<strong>and</strong>w„(P',P") = w f,„(P')C n(P',P")/C n(P',P") - w f, n(P')w c, n(P',P") (5,3ID)The kernels <strong>and</strong> reaction probabilities in Equations (5.296) through (5.299) are the same a*those that govern the analog game.Equation (5.295) is known to have a unique bounded solution if (cf. Theorem 5,1)'.1. The supremum of the integral of ££(P.P") with respect to P" is bounded2. The norm of a sufficiently large-order iterate of !£ is less than unity3. The source term I 2(P') is boundedIn the analog game, i£(P,P") = L(P,P") <strong>and</strong> conditions 1 <strong>and</strong> 2 cottwo conditions of the feasibility. Thus, if an analog game is feasible, its ^whenever the source term of the second-moment equation is bounded. TM om< C t.-ru 1 ,turn, is certainly bounded if the contribution functions are bounded. In TE >pjn " . . IM. >>ocollision density (or flux) at a point.In nonanalog games, it is usually difficult to check the fulfillment of conditio.-general. For nonmultiplying games, it is sometimes expedient to replace conditions2 by the stricter conditionsupdP"i£(P,P")= sup J dP" j dP'T(P,P')c s(P')C s(P',P")w(P,P')w s(P',P") =S b < i (5.306]
260 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> CalculationsAlthough this condition is generally much more than necessary for a finite nonanalog variance,its use is reasonable since if is not satisfied, there is a great chance that the analoggame has lower variance than the nonanalog (as will be seen in the next section) <strong>and</strong> thereforethe usefulness of the nonanalog simulation is dubious. There is, however, a special field ofsimulations (called the correlated <strong>Monte</strong> <strong>Carlo</strong>) where the use of a nonanalog game is notoptional, for the simulation is performed simultaneously in several different systems. Insuch simulations, a priori investigation of the finileness of the nonanalog variances may beimportant <strong>and</strong> condition (5.306) may help in choosing the system in which the simulationis played analog. This problem will be addressed in Chapter 6.1.C SUFFICIENT CONDITIONS OF VARIANCE REDUCTION BY NONANALOGGAMESAn exact comparison of variances of different unbiased games would only be possibleafter the solution of the respective second-moment equations. This, however, usually ismuch more formidable a task than the exact solution of the first-moment equation, i.e., theanalytical calculation of the reaction rate in question. On the other h<strong>and</strong>, it usually is notnecessary to determine the variance of the game for purposes of comparison with othergames because one is interested only in the relative merits of the different schemes. Forsuch purposes, it is often sufficient to analyze the rough structure of the second-momentequation or to solve it in highly idealized models.Based on elementary properties of the equations, here we give sufficient conditionsunder which one game results in lower variance than another. Let us first consider a partiallyunbiased nonanalog game which uses the same contribution functions, S{f,f a,f s,{f n}„,}, asthe corresponding analog game. The second moment of the score in such a game satisfiesEquations (5.295) through (5.299) with f„ = f u. The second moment of the score in theanalog game satisfies the same equation, but the weight factors w t
261withF„(P',P") = i;(P',P") + 2f a(P',P')M,(F') + M 2(P"),a = s,nNow, according to Theorem 5.2 in Section 5.I.B, the solution of Equation (5.307) is positiveeverywhere, i.e., the analog variance is everywhere greater than the nonanalog variance ifthe source term of the equation is positive. On the other h<strong>and</strong>, for the positivity of the sourceterm, it is sufficient that A(P,P') be everywhere positive. Finally, since every term in A(P,P')is a product (or the integral of a product) of a positive function <strong>and</strong> a factor of the form (I— ww„), A(P,P') > 0 if the factors are positive. The reasoning above is summarized inthe following theorem.Theorem 5.20 — A partially unbiased nonanalog game has a lower variance than thecorresponding analog game with identical contribution functions (estimators) if for everyevent sequence starting from P, entering a collision at P'', <strong>and</strong> leaving the collision, at P''*,the following inequalities hold:f(P,P') T(P,P') (5.308)for every P <strong>and</strong> P' such that f(P,P') > 0f(P,P')6 s(P')C s(P',P") =¾ T(P,P')c s(P')C s(P',P") (5.309)for every P, P', <strong>and</strong> P" such that f s(P',P") > 0 or M 2(P") > 0T(P 5POaXPOq n(POC n(P',?") 2* T(P 5POc 1(POq n(POC n(POP") (5.310)for every P. PO <strong>and</strong> P" such that f n(P',P") > 0 or M 2(P") > 0T(P,P')c,(P') 3= T(P,P')c a(P')(5.3Ii)for every P <strong>and</strong> P' such that f a(P') > 0T(P 1POaXPOq n(PO ^ T(P,P')cXP0q n(P0 (5312)for every P <strong>and</strong> P' such thatJdP"C n(P',P")[f n(P',P") + M 1(P")] ^ 0<strong>and</strong> in some finite region of the domain of simulation, strict inequality holds in one of therelations above.Proof. If conditions (5.308) through (5.311) hold, then according to Equations (5.300)through (5.305), w(P,P') < 1, w(P,P')w a(P',.) < 1, <strong>and</strong> thus every term in the expressionof A(P,P') is positive, hence, so is A(P) for every P.uThe conditions above are sufficient but not necessary for variance reduction; in fact,they are rather strict. For instance, a strict inequality in condition (5.308) certainly will nothold over the entire phase space since both the analog <strong>and</strong> nonanalog transition kernels are
262 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationsnormalized to unity <strong>and</strong> their difference may have no constant sign. On the other h<strong>and</strong>, thetheorem implies that a distortion of the kernels, which increases their values in importantregions (where the contribution <strong>and</strong> the expected score is large) <strong>and</strong> decreases them at lessimportant points, will probably yield variance reduction.The theorem gives conditions of variance reduction in terms of the kernels that describea transition from a starting point (or a postcollision point) to the next postcollision point.For symmetry reasons, it is expected that similar conditions can be constructed in terms ofthe transition probabilities between two successive precollision points. This is indeed so,<strong>and</strong> it is demonstrated by the example of a nonmultiplying game in which only free flightsbetween two collisions contribute to the score, i.e.,f a(P') - f s(P',P") = 0Let3~(P,P') =T(P,P')w(P,P')<strong>and</strong>r€(P',P") =c s(P')C s(P',P")w s(P',P")Then we writeIf(P,P") -JdP'9"(P,P') c €(P',P")Furthermore, let us introduce the notationsm,(P') = JdFC(POR)M 1(P") i = 1,2<strong>and</strong>m,(P") = JdF^(POF)M 2(P")Then the difference of the analog <strong>and</strong> nonanalog second moments follows from Equations(5.295) through (5.299) asA(P) = JdP'T(P,P0[l w(P,P0][f 2 (P,P0 + 2f(P,P0m,(P0 + m 2(P0][dP'37P,P0[m 2(P0- ITi 2(PO]It is seen that A(P) > 0 if w(P,P0 < 1 <strong>and</strong> m 2(P0 > rh 2(P0. On the other h<strong>and</strong>, it followsfrom Equations (5.295) <strong>and</strong> (5.297) thatrh 2(P) = JdP'W.POjdFgdPOP")|f 2 (P\P") + 21XPOPOm 1(F) 4- m 2(P")] (5.313)<strong>and</strong> similarly for the analog momentm 2(P) • dP'C(P,P0 dP"T(P\P") [P(POF) 4- 2IfPOFOm 1(F) + m 2(F)] (5.314)
Subtraction of Equation (5.313) from (5.314) shows that m,(P) > Ih 2(P) ifC(P,P')T(P',P") > ^P 1PO SOPOP")<strong>and</strong> we have the following.Theorem 5.21 — A partially unbiased nonmultiplyit j .k •U •) ,. ^ < > .• * •are assigned to intercollision flights only has a variance NOR . i1I > >•, n • h. >,>h JO.analog game with the same contribution function if fo> ft. < ( 0C(P,P')T(P',P") ss C(P,P')T(P',P") (5.316)for every P, P', <strong>and</strong> P" such that f(P', P") > 0 or m 2(P") > 0.Generalization of the theorem to multiplying games goes along the lines t A' # . i
264 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationssome reaction rate in V is to be estimated. Assume also that no particle can enter V fromoutside, i.e.,M 1(P) = 0 if P^VIn the ELP method, the particles are supposed to start from V <strong>and</strong> the nonanalog transitionkernel is such that the probability of leaving the spatial region of V is zero, i.e., if we denote•9(P) = j dP' T(P 1P')then the nonanalog transition kernel readsT(P,P') = T(P,P')/-o(P) if P,P'eV (5.317)<strong>and</strong> zero otherwise [cf. Section 5.VLB, Equation (5.227)]. In the simplest form of themethod, the collision kernel is not distorted, i.e.,C(P',P') =C(P',F')Now, if the contribution functions in the analog game are such that they give scores onlyif their arguments belong to V, thenT(P 5P')T(P,P')whenever f(P,P') > 0 <strong>and</strong> conditions (5.308) through (5.312) are satisfied. Finally, if Vdoes not contain the whole geometrical space, then 1 Q(V) is definitely less than unity forcertain points P <strong>and</strong> a strict inequality holds in Equation (5.308). Accordingly, the ELPmethod results in lower variance than the analog game. Note, however, that variancereduction here also does not necessarily call forth an increase in efficiency. In fact, it canbe seen 32that the ELP method is likely to decrease the efficiency in the estimation ofmonoenergetic reaction or leakage rates because the gain in variance does not compensatefor the loss in computing time, which is due to the increased number of collisions. Nevertheless,use of the ELP method is justified in problems where the spatial region of V issmall (i.e., the probability of leakage is large) <strong>and</strong> effects of multiple scattering (e.g.,slowing down) are to be investigated in V. 2 0The ELP method decreases the variance of the score because it keeps the particles insidethe important region. It can, however, be shown that the majority of the collisions are playedin the vicinity of the boundary of V, <strong>and</strong> the weights of the particles entering such collisionsmay be very different. This problem may be remedied by distorting the collision kernel insuch a way that direction pointing toward the inner part of the region is more probable. Thisbiasing is expected to level the statistical weights <strong>and</strong> thus decrease the variance of the score.A method to this effect was proposed by Borgwaldt <strong>and</strong> is called the modified ELP (MELP)method. The basic idea of the method is formulated as follows. Let P' = (r.F.')t V be aphase-space point adjoint to the point P' = (r,E')e V such thatC(P 5P') =C(P 5P')In other words, the probabilities of the postcollision coordinates P' <strong>and</strong> P' are equal. Let•CT(P) again be the probability that a particle starting from P has its next collision inside V.
265Let the nonanalog transition kernel be the same as in the ELP method [cf. Equation (5.317)1<strong>and</strong> let the nonanalog collision kernel beC(P,P') = C(P,P')2fl(P')/[«(P') + 'd(P')]; P,P' e V (5.318)This means that selecting P' from C(P,P') is accepted as a postcoliision coordinate with aprobability.f)(P')/[-f)(P') + -fj(P')]<strong>and</strong> the adjoint point P' (or one of them if there are more) is accepted with the complementaryprobability. Obviously, the postcoliision direction which determines a longer (optical) trackinside V has the greater probability of acceptance. NowT(P',P") = T(P',P")/ft(P') S 2 T(P',P") for PVP 3 CV<strong>and</strong>C(P,P')f(P',P") -C(P,P')T(P',P")2/[-8(P') •f -fj(P')]5* C(P,P')T(P',P") for P,P',P"eV<strong>and</strong>, therefore, the conditions of Theorem 5.21 are satisfied, provided the game is nonmultiplying,the only contribution functions is of the form f(P',P"), <strong>and</strong> there are no particlesentering V from outside. Most of these limitations can be removed, <strong>and</strong> it is found that theMELP method decreases the variance, compared to the analog game.Comparison of the variance of the ELP <strong>and</strong> MELP methods is not possible on the basisof Theorems 5.20 or 5.21 since the weight factor w s(P,P') in the MELP method assumesvalues both greater <strong>and</strong> less than unity. It can, however, be seen that if the domain ofsimulation is such thatM 1(P) > M 1(P) (i = 1,2)whenever the optical distance from P to the boundary of the domain is greater than thisdistance from P, then the MELP method has lower variance than the ELP method.The simple method of variance comparison followed in this section can be successfullyapplied to the investigation of the variance of the equivalent nonmultiplying game introducedin Section 5.1I1.C. This will be seen in the next Section.E. VARIANCE AND EFFICIENCY OF THE EQUIVALENT NONMULTIPLYINGGAMEIt has been shown in Section 5.HI.C that any multiplying game can be replaced by ahypothetical, nonmultiplying game that results in an unbiased estimate of the required reactionrate. This game is expected to have the advantage of not producing branching histories <strong>and</strong>thus requiring a lower amount of computing time than the multiplying game. We have seenin Section 5.V.F that if the mean number of secondaries per collision is greater than unity,then it is indeed so. In order to have an idea about the efficiency of the game, its varianceshould be compared to that of the multiplying game. Let us consider a multiplying analoggame <strong>and</strong> introduce the equivalent nonmultiplying game, as in Section 5.III.C. The second
266 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationsmoment of the score in the analog game is given in Equations (5.295) through (5.299) aftersetting all the weight factors to unity, i.e.,M 2(P) = I dP'T(P,P')[P(P(P') + 2KP 1PO^ 1(P') + 30(F)]I dP'T(P 1P') dP"C(P',P")!M 2(P") Mf(P")J (5.319)with^ 1(F) = c a(P') f a(P') + c S(P')JdP"C s(P',P")[f S(P',P") + M 1(P")]+ C 1(P') 2 nq„(P') fdP"C„(P',P")[f n(P',P") + M 1(P")] (5.320)<strong>and</strong>Tf 2(P') = c a(P')f 2 (P') + c S(P')JdP"C S(P\P")[f S(P'.P") + M 1(P")] 2+ C 1(P') X nq N(P') fdP"C„(P',P")[f N(P',P") + M 1(P")] 2 (5.321)ii = i J+ c f(P') X n(n - Dq 1 1(POLJDFC N(POR)[UPOP") + M 1(F)]The second-moment equation for the equivalent game follows from Equation (5.92) asJl 2(P) = JdP'T(P,P')[f 2 (P,P') + 2f(P,P0|,(P') + I 2(P')]+ JdP'T(P,P')c(P')JdFC(P',F)[M 2(P') - M 2 (F)J (5.322)whereJf 1(P') = JdFC(POP") [f*(P',F) + M 1(P")] (5.323)J 2(PO - c(P')JdP"C(P',P")[f*(P',F) + M 1(F')] 2 (5.324)<strong>and</strong>c(P') = C 8(P') + C 1-(PO 2 nq n(P') (5.325)H= ithe mean number of secondaries per collision in the analog game. L(P' ,P") is the contributionfunction in a collision from P' to P", <strong>and</strong> the equivalent nonmultiplying game is unbiasedif L satisfies Equation (5.88) with unit weights, i.e., ifdP"C(P',P")f*(P',P") = c a(P')f a(P') + c s(P') JdF C 8(POF) f s(P',P")+ C 1(P') V nq„(P') I dP"C n(POPOf n(POP") (5.326)
267An Immediate consequence of this equation is that the quantities SF(P') <strong>and</strong> J 1(P') in Equations(5.320) <strong>and</strong> (5.323), respectively, are equal. [Note that they represent the expectedfinal score due to a particle entering a collision at P'. This quantity was denoted by N 1(P)in Chapter 5.111.] Introducing the notationA(P) = M 2(P) -Ji 2(P)the difference of the variances in the analog <strong>and</strong> equivalent games, it satisfies the equationA(P) = J dP'T(P.P')[Ss(P') -JS 2(P')]+ JdP'T(P 5P')[I - c(P')]JdP"C(P',P")[M 2(P") - Mf(P")]+ dP'T(P,P')c(P') dP" C(P',F)A(P")Now, A(P) > 0 if c(P') < 1 <strong>and</strong> J 2(P') > J 2(P'). In order to keep the derivation as shortas possible, we do not proceed further in full generality, but we assume thatf a(P') = O 5f s(P',P") = f n(P',P") - f c(P',P")in the analog game, i.e., we consider a game in which no score is assigned to an absorption<strong>and</strong> the scores in a collision do not depend on the type of reaction in the collision. Thissimplification is also justified by the fact that the great majority of the commonly usedestimators are such indeed. Thenf*(P',P") =f t(P',P")satisfies Equation (5.326) <strong>and</strong>^ 2(P') - J 2(P') -- [1 - c(P')]JdP"C(P',P")M 2 (P")+ c f(P') E n(n - l)q n(P')|JdP"C„(P' 5P")[f c(P',P") + M 1(P")])^ (5.327)is positive If c(P') < 1. Thus, we have the following theorem.Theorem 5.22 — The variance of an analog game, with the contribution functions f(P,P')<strong>and</strong> f c(P',P") is not lower than that of the equivalent nonanalog game with the same contributionfunctions ifc(P') ^ 1A number of comments are proper here.1. Since SF — J 2in Equation (5.327) usually is definitely positive for c(P') < I, it isexpected that the variance of the equivalent game is lower than that of the analoggame even if c(P') is slightly greater than unity.
268 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculations2. As was shown in Theorem 5.12 in Section 5.V.F, the number of collisions to beplayed in the equivalent game is greater than that in the analog game if c(P') < 1i.e., the variance <strong>and</strong> computing time antagonize, a phenomenon characteristic of mostvariance reduction techniques.3. The equivalent game coincides with the survival-biased nonanalog game for nonmultiplyinganalog games since then c(P') = c,(P') 1 c a(P').4. For multiplying analog games, the equivalent game is a generalization of survivalbiasing in the sense that not only absorption, but also multiplication, is replaced byalteration of the statistical weight.It is reasonable to ask what gain is expected in efficiency by introduction of the equivalentnonmultiplying game, instead of the survival-biased multiplying game. By analogy to thederivation of Theorem 5.22, it can be shown that the condition of variance reduction by theequivalent game would beC 5(P') 4- c,(P') V nq„(P') - c(P') < 1 - C 3(P') --• c s(P') + c f(P')Although this condition never holds, it is only sufficient, not necessary, <strong>and</strong> comment 1above applies here too. On the other h<strong>and</strong>, the number of flights played in the equivalentgame is certainly lower than the corresponding number in the game with survival biasing,<strong>and</strong> the efficiency ratio of the two games, which is determined by the product of the respectivevariance <strong>and</strong> number of flights, is still uncertain.Let us compare the efficiencies of the survival-biased analog <strong>and</strong> equivalent nonmultiplyinggames in the approximation of the separation assumption (cf. Section 5. VII.B). Letus consider the problem of a monoenergetic isotropic transport in a homogenous mediumin V with an absorption probability C 1. Assume that any collision results in either an absorptionor an n-fold multiplication. Denotinge =1 — c athe man number of secondaries per collision in the game isc =en<strong>and</strong> the collision kernel reads€nC(P',F') = —8(E'4-rr- E) = enC s(P',P")The survival-biased collision kernel, according to the definitions in Section 5.VIII.I), isC(P',F') =nC s(P',P")<strong>and</strong> therefore the weight factor to be applied after every collision isw s(P',F') = w,,(P',P") = w t„(P') =tLet the collision rate be the quantity to be estimated <strong>and</strong>, for the sake of simplicity, let ususe the collision estimator. Thenf(P,P') - 1, f.(P') - f s(P',P") - f„(P',P") = 0
269<strong>and</strong> according to Equations (5.295) through (5.299), the second moment of the score in thesurvival-biased analog multiplying game satisfies:M 2(P) = J dP'T(P,P')|L + 2JDP' enC 5(P'.POM 1(F) + e 2 n(n - 1)IdFCs(POFOM 1(P")+• j dP'T(P,P') dP"e 2 nC s(P',P")M 2(F') (5.328)Taking into account that the first-moment equation (5.273) becomesM 1(P) = J dP'T(P,P0 + J dP'T(P,P0JdP"enC s(P0P")M,(F) (5.329)the first two terms on the RHS of Equation (5.328) are rewritten to yieldM 2(P) = 2M 1(P) - JdP'T(P,P0 + JdP'T(P,POe 2 Ii(HI)M 2 IP')+ dP'T(P,P')dP"e 2 nC s(P',F)M 2(P") (5.330)withM 1(P') = dP"C s(P',F)M,(P") (5.331)Now, in the approximation of the separation assumption Equation (5.257), the averagedsolution of Equation (5.328) isM 2= [2M 1- P c+ e 2 n(n - l)m (2)]/(l - e 2 nPc)where P 1is the first-flight collision probability in V <strong>and</strong>1m
270 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationsi.e., the average number of flights with the separation assumption isN = 1/(1 nP c)The product of the variance <strong>and</strong> the number of flights in the survival-biased analog gamebecomesE 1 == D 2 N - P c(l P c)/[d - enP c) 2 (l - e 2 nP c)(l - nP c)] + a (5.334)wherea = P ce 2 n(n - l)[(m (2)- M 2 ]/[(l - e 2 nP c)( 1 - nPj] (5.335)The second moment of the score in the equivalent nonmultiplying game followsEquations (5.322) through (5.324) asfromM 2(P) - 2M 1(P) - JDP'T(P 1P') + | vdP'T(P,P')|dP"e 2 n 2 C s(P',P")it 2(P")i.e., the average second moment in the separation assumption isM 2= (2M 1- P,)/(l - e 2 n 2 P c)Hence, the variance readsS 2 -- PfI - P c)/[(1 enP t) 2 (l - e 2 n 2 P c)]The mean number of flights satisfies the equationX(P) = 1 + JDP'T(P |dP'T(P,P')|dP"C 7P'^s(P',P")>f(P")i.e.,M = 1/(1 - P c)Finally, the inverse of the efficiency in the equivalent game reads= P C/[(1 - enP c) 2 (l 6 2 n 2 P c)Now the efficiency of the equivalent game is higher than that of the survival-biased analoggame if E 1 > %~ '. Notice that a in Equations (5.334) <strong>and</strong> (5.335) is nonnegative for nSs 1 sincem,„ = -' - IdP'4TTV 1 dP"C,!P',P")M,(P") -' - - dP' jdP"C s(P',P")M,(P")_4TTV J J '= MTThus, the efficiency relation above certainly holds if E2"' — a > 'to' 1 , i.e., if(1 - P c)/|(l - e 2 nP c)(l - nPj] > 1/(1 - e 2 n 2 P c)
27!After rearrangement, this relation becomes( n_ 1)(1 _ e2 n) > Owhich holds if1 < n < 1/eor,equivalently, if1 - c„ < c < 1/(1 - C 11)Numerical experiments show 3 -' that the gain in efficiency predicted byabove is actually realizable. Figures 5.4 <strong>and</strong> 5.5 present the efficiency ratinonmultiplying game <strong>and</strong> the survivabbiased multiplying analog game v-be*'" < v i • •collision rate in homogeneous slabs of different thicknesses, x, in a moaoetwi_ i. « isimulation. The absorption probability is c a= 0,2 <strong>and</strong> 0,3, respective! | > i i •i «•vof secondaries per collision, c = n(l — C 2)]. It is seen that the efficien » •
272 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculations2 62 52 A2 31 22 12. 01 9>-C_> 1. 8ZL U 1 7ULL1. 6LLU J 1 5LLI>
273A {c)FIGURE 5.5. Efficiency of the equivalent nonmultiplying game relative to that of the survival-biased analoggame in slabs of optical thicknesses X at absorption probability c, = 0.3.M,(P') is the expected score due to a particle entering a (extremum problem in Equation (5.337) is easily obtained byof the LHS of the equation with respect to the contribution f?to f(P,P') yieldsg(P,P') + M 1(P') =X(P)Multiplying this Equation by T(P,P') <strong>and</strong> integrating over P', we haveX(P) = dP'T(P,P')[g(P,P') + M 1(P')] = i.(P) + dP'T(P 1P') dP"C(P',P")M 1(P"')
274 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationsi.e.,X(P) =M 1(P)Henceg(P,P') = M 1(P) - M 1(P') (5.340)i.e., the optimum composed estimator is the difference of the expected scores at the starting<strong>and</strong> end point of a flight. 26Variations of Equation (.5.337) with respect to the other contributionfunctions provide the equation systemf(P,P') + f,(P') -M 1(P)f(P,P') + f s(P',P") = M 1(P) - M 1(P")<strong>and</strong>f(P,P') + f rl(P',P") + (n - I)JdP"C n(P',P")[f„(P',P") + M 1(P")] - M 1(P) - M 1(P")It is easily seen that the solution of the equation system that also satisfies Equation (5.340)isf(P,P') = M 1(P), f a(P') = 0 (5.341)<strong>and</strong>f s(P',P") = f„(P',P") = ~M,(P") (5.342)Equations (5.341) <strong>and</strong> (5.342) define the minimum-variance partially unbiased estimators<strong>and</strong> the following theorem holds.Theorem 5.23 — The minimum-variance partially unbiased estimator set in Equations(5.341) <strong>and</strong> (5.342) yields a zero-variance estimate.Proof. Substituting the estimators into Equations (5.319) through (5.321) of the secondmoment, it can be seen that M 2(P) = M 1(P). Instead of the formal proof, however, let usrealize that the contribution functions in Equations (5.341) <strong>and</strong> (5.342) score M 1(P 1)M 1(P 1 +,) in the i-th flight (that starts from the collision point P 1) if it is followed by a realcollision <strong>and</strong> M 1(P,) if it is the last flight (followed by an absorption). Therefore, the finalscore in a history started from P is always M 1(P), with no fluctuation.Note that we have also shown in passing that the minimum variance-composed estimatorhas the form in Equation (5.340). Naturally, this estimator is no more feasible than the zerovarianceestimators above. Nevertheless, it will be seen in Section H that there exists apartially unbiased estimator which approximates rather well this optimum. It can be seenfrom Equations (5.319) through (5.321) <strong>and</strong> (5.3.39) that in a game where the optimumcomposed estimator g(P,P') scores in the intercollision flights <strong>and</strong> zero contributions followfrom the collisions, the variance of the score satisfies the equationD 2 (P) = JdP'T(P,P')V(P') + JdP'T(P,P')JdP"C(P',P")D 2 (P") (5.343)
275withV (P') =dP" C(P',F) Mf(F)dP"C(P', F)M 1(P")+ Ct(P') 2 "(n ~ Oq n(P')n - 1dP" C 11(P' ,FJM 1(P") (5 344"!Another interesting consequence ot the derivation above is that although the composes!estimator is the expectation of the reaction-dependent contributions over the possible outcomesof the collision <strong>and</strong>, as such, one might expect a lower variance, it does not necessarilydecrease the variance of the score, compared to the reaction-dependent estimators. Nevertheless,in most practical cases, the estimators do not depend on the type of collision (cf.Section 5. VI.B) <strong>and</strong> therefore approximations to the minimum variance-composed estimatorhave lower variance than the usual estimators.In the following section, we compare the variances of the commonly used estimatorsin an analog simulation. A corresponding analysis for nonanalog game may be performedin a similar way.G. RELATIVE MERITS OF THE COMMON ESTIMATORSWe consider here the estimators derived in Section 5.VLB. Let us first notice thai(except for the last-event estimator) all these estimators are the composed type, i.e., theydo not depend on the type of reaction at the end of the free flight <strong>and</strong> they only depend onthe starting point, P, <strong>and</strong> end point, P', of the flight. Comparison of the variances of reactiondependentestimators in nonmultiplying games is reported In References 28 <strong>and</strong> 31.The second moment of the score in an analog game with the estimator f(P,P') followsfrom Equations (5.319) through (5.321) asM 2(P) = dP'T(P.P') f 2 (P,P') + 2f(P,P') dP"C(P',P")M,(P")+ dP' T(P,P') dP"C(P' ,P") M 2(P")(5.345)We shall follow the usual procedure of variance comparison, i.e., we examine the differerw;;.-of the source terms of Equation (5.345) for estimator pairs. If A(P) denotes the differenceof the variances with the estimators f,(P,P') <strong>and</strong> f 2(P,P'), thenA(P) = A(P) +dP"L(P,P")A(P")whereA(P) = |dP'T(P,P'){f 2 (P,P') - {l(P.P')2[f,(P,P') - f 2(P,P')]LDP"C(P',P")M4P")} (5.34?;The variance of the score by the estimator f, is greater than that by C 2if A(P) > 0 for everypoint P of the domain of simulation (sufficient condition).Let us first compare the variance of the score with an arbitrary estimator of the formf,(P,P') =f(P,P')
276 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculations<strong>and</strong> the variance with the expectation estimator corresponding to itf,(P,P') = f E(P) =jdP'T(P,P')f(P,P')The difference of the source terms in this case readsA(P) = dP'T(P,P')f 2 (P,P') dP'T(P,P')f(P,P')2 dP'T(P,P')lf(P,P') - f E(P)]M,(P')(5.347)orA(P) = dP'T(P,P'){[f(P,P') + M 1(P')] 2 - [f E(P) + M 1(P')]'}withM 1(P') =JdP"C(P',P")M,(P")The difference of the first two terms in Equation (5.347) is certainly nonnegative <strong>and</strong> thereforethe following theorem holds.Theorem 5.24 — A partially unbiased estimator yields greater variance than the correspondingexpectation estimator iff E(P)
277score by the expectation estimator is definitely greater than that of certain other partiallyunbiased estimators. 28 - 42For example, for a not-too-large probability of absorption (not-too-small number ofsecondaries per collision), the track-length estimator has, indeed, a lower variance than theexpectation estimator. 28On the other h<strong>and</strong>, it is also seen from Equation (5.347) that with increasing probabilityof absorption, the third term in the expression of A(P) decreases in modulus, i.e., forsufficiently strong absorption, the positive difference of the first two terms is dominant <strong>and</strong>the expectation estimator becomes more efficient than any other partially unbiased estimator.In the limiting case of a purely absorbing medium, the expectation estimator will be identicalto the optimum composed estimator in Equation (5.340), i.e.,I) n(P) = M 1(P) = jdP'T(P,P')f(P,P') (5.348)with zero variance.Although in most practical cases the expectation estimator provides the smallest varianceof all the partially unbiased estimators, it should be taken into account that when using it,one has to evaluate an exponential function at every collision. Since this procedure is rathertime-consuming, the track-length <strong>and</strong> collision estimators may find their application evenin such problems where their variances are expected to be somewhat higher than that of theexpectation estimator.Next, we consider the variances of the collision <strong>and</strong> track-length estimators in collisionrateestimations. Let us assume again that the collision rate is to be estimated in a barebody, i.e., no particle enters the body from outside. In this case,f,(P,P') = 1f 2(P,P') =
278 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationsis less than the variance of the collision estimator if the maximum optical extension, T M, ofthe region (where the estimation is performed) satisfiesT 111< D (5.350)with1 < D < 1.255depending on the strength of absorption (sufficient condition).Proof. The first term on the RHS of Equation (5.349) is nonnegative if(1 + 2-rJeT» > 1which givesIf the probability of absorption in the region is unity (purely absorbing medium), then thiscondition is competent, i.e., the statement of the theorem holds with D = 1.255. On theother h<strong>and</strong>, A(P) is certainly positive if T M< 1 since in this case both terms on the RHSof Equation (5.349) are positive. Thus, the quantity D in condition (5.350) falls between 1<strong>and</strong> 1.255.•It is to be stressed that the theorem establishes sufficient conditions of the variancereduction by the track-length estimator. Therefore, the variance of the track-length estimatoralso may be less than that of the collision estimator in regions with considerably largerdimensions than the one predicted by the Theorem.Note also that both Theorem 5.24 <strong>and</strong> 5.25 concern the variances due to starters froma given point P of the region in question (pointwise variances). Obviously, the variancedifference of the total score (estimate of the reaction rate) may be positive even if thepointwise difference is negative at certain points. In other words, the theorems give sufficientconditions under which the pointwise differences are positive, <strong>and</strong> milder conditions wouldsuffice for the positivity of the total variance difference. Such milder conditions may bededuced from the approximate variance expressions obtained by the separation assumption. 31The corresponding expressions will be presented at the end of this section. As an exampleof such milder conditions, we note that although Theorem 5.25 predicts the superiority ofthe track-length estimator over the collision estimator for regions of dimensions about 1mfp, approximate comparison of the total variances shows 30that the track-length estimatormay be more efficient in regions as large as —10 mfp if the region is lightly absorbing (c,< 0.1).The last-event estimator, which scores at the end of a history, was one of the firstestimators applied in transport <strong>Monte</strong> <strong>Carlo</strong>. We shall here investigate its variance relativeto the variance of the collision estimator in a nonmultiplying game where the absorptionrate is to be determined:R -dP'c a(P')4((P')
279Accordingly, the collision estimator isf(P') =c a(P')The absorption-related last-event estimator follows from Equation (5.220). ]P', it scores unity if an absorption occurs <strong>and</strong> zero otherwise. The second .-,«..•
280 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationsh<strong>and</strong>, a game with survival biasing is again free of fluctuations (although it consists ofinfinite histories: cf. Section 5.V.G).When reaction rates other than the absorption rate are estimated, the relative merits ofthe two estimators can be examined on the basis of the inequalityTn 1(P') ) if r' ¢ V(5.353)
281where P = (r,to,E), P' = (r', - 1) 2 /(1 - e- T >>) 2+ 2 dP'T(P,P')a(P)I(P)M 1(P')/(l - eT0Jp'eVor equivalentlyI 2(P) = g 2 (P)(e T » - l){a 2 (P) - [2a(P) - I](I - e^)} + 2g(P)a(P)L,(P) (5.354)whereg(P) = I(P)/(1 - e-^) (5,355)<strong>and</strong>L 1(P)= UPT(P 1POM 1(P')= dP'T(P,P')dP"C(P',F)M 1(P") (5.356)
282 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> CalculationsL 1(P) is the expected score due to a starter from P decreased by the expectedscore. With these notations, the first-moment equation readsfirst-flightM 1(P) - I(P) 4- L 1(P) (5.357)It follows from Theorem 5.2 that the variance of the score is minimum if the variance ofthe source term I 2(P) in Equation (5.354) also is minimum. Minimizing the source termwith respect to the function a(P), we find that M 2(P) = minimum ifg(P)a(P) - I(P) - L,(P)e- T V(l - e -)Inserting this expression into Equation (5.353), the estimator becomesfs,(P,P') -I(P) + L 1(P) - fL,(P)/(1 - e- T ")] if r' e VKP) + L 1(P) if r' ^ V(5.358)Taking into account Equation (5.357), it is apparent that f SIcan be rewritten asF SI(P,P') - M 1(P) - [ 0"PT(P 1P 1- )M 1(P')/ dP'T(P,P')JXv(P') (5.359)JvJvwhere Xv(P') is unity if P' e V <strong>and</strong> zero otherwise. Notice that this estimator differs fromthe optimum composed estimator in Equation (5.340) only in that M 1(P') in Equation (5.340)is replaced by its average over the next flight in Equation (5.359). This difference, however,is essential since by using approximate values of any of the two terms in Equation (5.340),the resulting estimator will be biased. On the other h<strong>and</strong>, the estimator f SIin Equation (5.358)will remain partially unbiased with any value in place of L 1(P). Indeed, if we take theexpectation of f slover the next flight from P, the terms containing L 1(P) cancel out irrespectiveof the explicit form of L 1(P). Below we show that relatively rough approximations to L 1lead to considerable variance reduction in comparison to any common estimator.In order to obtain an impression about the variance-reducing capability of the newestimator, let us consider the source term of the second-moment equation when the multiplescattering term L 1(P) in Equation (5.358) is replaced by some approximate value €,(P). ThenI 2(P) = 1(P)[I(P) + 2L 1(P)] - g(P)[2L 1(P) - -^1(P)]€,(P)e-Ml " e^)Let us consider the expectation estimator f E(P) = I(P) as a reference. It follows from Equation(5.345) that the source term of the second-moment equation when the expectation estimatoris applied has the formIf(P) = 1(P)[I(P) + 2L 1(P)]i.e., the newly introduced estimator has a lower variance than the expectation estimator ifIfXP) >I 2(P)i.e., if2L 1(P) > €,(P)
283This means that in a rather broad range of the approximations of L 1(P), the new estimatoris expected to be more efficient than the expectation estimator.In practical applications, we propose the following approximationM 1(P') -JdP"C(P',P")M,(P") = c • Rwhere c is some average value of the mean number of secondaries per collision <strong>and</strong> Ran interim estimate of the reaction rate R to be estimatedin this caseR R I dP'f(P')iKP') = IdP 1 Q(POM 1(P')L 1(P) " cR(l - e- Tt )<strong>and</strong> the estimator in Equation (5.358) readsf sl(P,P')l(P) cRe - T - if r' e VI(P) 4- cR(l - e- r ") if r' ¢. V(5.360)In the simulation procedure, the total population of the starters is divided into two groups.While the trajectories from the first group are being simulated, the conventional expectationestimator is used to determine an initial value of R. In the second stage of simulation, whenstarters of the second groups are processed, the improved estimator in Equation (5.360) isapplied. Meanwhile, the value of R is adjusted from time to time. This is why this estimatoris called self-improving. Simple numerical experiments show 26 that the variance of the selfimprovingestimator is significantly lower than that of the expectation estimator in regionswith absorption probabilities less than about 0.7. The gain in efficiency increases withdecreasing absorption. For low absorptions, the variance of the self-improving estimator isabout 40% lower than that of the expectation estimator.With more sophisticated approximations to L 1(P), the self-improving estimator may verylikely be made still more efficient. Furthermore, since the use of this estimator needs almostno extra computational effort in those cases where expectation estimators are used, the lattermay be replaced by the self-improving estimator, thus gaining efficiency almost gratis.I. VARIANCE VERSUS EFFICIENCY IN A NONANALOG GAMEWe have examined the variances of several analog <strong>and</strong> nonanalog games <strong>and</strong> nrvin this Chapter. Minimization of the variance of a <strong>Monte</strong> <strong>Carlo</strong> procedure is impuii at. >obtaining reliable estimates of the quantity of interest. The amount of compi(computing time) necessary for obtaining an estimate of given accuracy, howiequally important parameter of the quality of a <strong>Monte</strong> <strong>Carlo</strong> game. Parallel miof the variance <strong>and</strong> of the computing time leads to an optimum <strong>Monte</strong> <strong>Carlo</strong> scntrr, refficiency, defined as the inverse product of these two quantities, is a reasonab'" •i .. Jof the quality of a game [cf. Equation (5.1)]. In practice, the computing time pe> 'i"characterized by the number of flights, N, to be played in a history. Therefore, the • U t- «of the estimate from nonanalog histories started from a point P isE - {[M 2(P) - M 2 (P)]N(P)}-
284 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationswhere, again, M 1represents the i-th moment of the score in such histories. Assume that wewish to compare the efficiencies of a given nonanalog game <strong>and</strong> the corresponding analoggame, the latter beingE = {[M 2(P) - MT(P)]N(P)}-'Let us denotePo(P) = [M 2(P) - M 2(P)|/[M 2(P) - Mt(P)I (5.361)<strong>and</strong>P N(P) = [N(P) - N(P)]/N(P) (5.362)Then the nonanalog game is more efficient than the analog, i.e., E > E ifPo(P) + PN(PV[I - p N(P)] > O (5.363)Thus, if both the relative variance difference, p D, <strong>and</strong> the relative collision-number difference,p N, are positive, then the nonanalog game is clearly superior to the analog game. Themajority of the commonly used nonanalog games, however, will only decrease either thevariance or the number of flights, compared to the the analog game, but very seldom bothof them.Theorems 5.12 <strong>and</strong> 5.20 reflect clearly this antagonism since whenever the sufficientconditions of variance reduction (formulated in Theorem 5.20) hold, the condition of Theorem5.12 (that would ensure a decrease in computing effort) is likely to fail <strong>and</strong> vice versa.The heuristic explanation of this contradiction is that nonanalog kernels that satisfy theconditions of Theorem 5.20 force the particles toward regions from where contributions tothe score are expected, i.e., they make the particles suffer a higher number of collisions inthe important regions.Finally, it is also noteworthy that variance reduction techniques often require highercomputing time per collision (or per free flights) than the analog game as a consequence ofthe more complicated kernels to be sampled. Therefore, any technique that is supposed toincrease efficiency should be examined very carefully before it is applied routinely.J. OPTIMIZATION OF SOURCE DISTRIBUTIONIn this Chapter, we have investigated the possibility of variance reduction by suitablealteration of the kernels that govern the simulation (nonanalog games) <strong>and</strong> by proper choiceof contribution functions (estimators). A third possibility of influencing the total varianceof a <strong>Monte</strong> <strong>Carlo</strong> game is the use of appropriately chosen nonanalog source densities.Alteration of the particles' source density changes the starting weights of the particles, buthas no effect on the simulation of the migration, i.e., source biasing does not necessitateessential changes in an analog simulation scheme.Let us consider a problem with an analog source density Q(P). Let M 2(P) be the secondmoment of the score due to a particle starting from P with a weight of unity. Assume thatthe source density is altered to some Q(P). Then the weight of a starter at P in the alteredgame follows from Theorem 5.9 asW 1,- Q(PVQ(P)
285Since no other biasing is assumed in the altered game, the second moment of the score dueto a starter from P isM 2(P) =Wf 1(P)M 2(P)<strong>and</strong> the total second moment of the score in the source-biased game isM 2= JdPQ(P)M 2(P) = JdPQ(P)Wf 1(P)M 2(P) = JdPQ 2 (P)M 2(P)/Q(P)provided the altered source is normalized to unity, i.e.,IdPQ(P) = 1The nonanalog source density is to be chosen such that the total second moment M 2beminimum. This means that the optimum source density is the solution of the variationalproblemJdP[Q 2 (P)M 2(P)/Q(P) - XQ(P)] = minwhere X is the Lagrange multiplier due to the normalization condition. Solution of theextremum problem leads to the following theorem.Theorem 5.26 — The minimum variance source density of an otherwise analog <strong>Monte</strong><strong>Carlo</strong> game has the formQ(P) = Q(P) VM 2(P)/j dP'Q(P') VM 2(P')The variance of the game with this density isD- = JdPQ(P)VM 2(P)J 2 - JdPQ(P)M 1(P)LJPractical realization of the optimum source density would require a priori knowledge of thesecond moment M 2(P) of the analog score at every point P. With point sources, this momentcan be estimated at a relatively low extra cost, but for extended sources, determination ofthe pointwise second moment is not possible. Hoffman 15proposes a version of the abovetechnique in which the probabilities of starting a particle from various phase-space regionsare altered in an optimum way. Let the entire phase space over which the source is extendedbe divided into N distinct regions denoted by (1), (2), (N). Let Q nbe the probabilitythat a particle starts from the n-th region in the analog game. Then obviouslyQ n=J dPQ(P)Let the altered game be such that the particles start from region n with a probability Q n,but let their distribution inside the region be the same as in the analog game. Accordingly,the altered source density readsQ(P) = Q n[Q(P)ZQ 1J if P e (n)
286 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculations<strong>and</strong>>: Q n= In= 1(5.364)The total second moment in the altered game isM 2= 2 Q n(Q 1VQ n) 2 f dP[Q(P)/QJ M 2(P)= 2 Q nf dPQ(P)M 2(P)/Q„(5.365)Minimization of Equation (5.365) with respect to Q nunder the condition in Equation (5.364)yieldsQnQ ndPQ(P)M 2(P)J(Il)/ i=i L J dPQ(P)M 2(P) (5.366)The variance of the optimum biased game isW - J £ I Q„ I dPQ(P)M 2(P)] 1 / 2 } 2 F E I ClPQ(P)M 1(P)U=ILJ
28?A. ESTIMATION OF BILINEAR FORMSIn the calculation of averaged transport theoretical quantities (such as group constants),expressions of the formdPiKP)4/*(P)f(Foften need to be determined. Here, ij»(P) <strong>and</strong>
288 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> CalculationsAccordingly, the total expected second moment equals the total expected score (reactionrate) with this estimator, i.e., 10 - 35JdPQ(P)M 2(P) - JdPi(((P)(p(P) = 2JdPiJj(P)vlj*(P)f(P) - JdPiJj(P)P(P) (5.369)The second term on the RHS is the expected total score in a game with the contributionfunction F(P). If M l , 2) (P) denotes the first moment of the score due to a particle starting fromP when the F(P) contribution function is used, then[ dP IIJ(P)F(P) = JdPQ(P)Mf(P)<strong>and</strong> the bilinear form in Equation (5.367) is expressed asB = -JdPQ(P)[M 2(P) + Mf(P)IAs a consequence of the considerations above an estimate of the bilinear form B is onehalf of the sum of the estimated second moment with the contribution f(P) <strong>and</strong> the estimatedfirst moment with the contribution F(P). The two estimates can be obtained in a single game<strong>and</strong> therefore the estimation of B requires no extra computing effort, compared with theestimation of any conventional reaction rate.An alternative method is illustrated in the special case of the estimation of the bilinearformB =J dPiKP)i)t*(P)where, again, ip* satisfies Equation (5.9). Obviously, B can be considered as an ordinaryreaction rate with the contribution function i|r*(P)- if M 1(P) denotes the expected score in agame with this contribution function, then, from Equation (5.57), it satisfies the equationM 1(F) = JdP'T(P,P'H*(P') + JdFX(P 5P^M 1(P")or, in view of Equation (5.12)M 1(F) = M 1(P) + JdF'L(P,F')X(P")This equation defines a game in which the (bilinear) score assigned to a flight from P isM 1(P), i.e., the expected final score (ordinary expected score) in a game started from P.Assume that the ordinary game is played with the contribution function f(P). Let us considera history that consists of the phase-space points P 0, PJ, P 1, P 2, P^. (PJ is the coordinateof the particle before its i-th collision <strong>and</strong> P 1is that after the collision.) Then M 1(P n) (theordinary expected score due to a starter form P n) is estimated by the sum of the collisionwisescores in the rest of the history, i.e., an unbiased estimate of M 1(P n) isNs„ = 2 f(p„.)
289The final bilinear score in the history is, in turn, the sum of the collisionwise bilinear scoress„, i.e.,N N N Nn = 1 n •=• 1 m = n m = I<strong>and</strong> hence, an unbiased estimator of the scalar product of the collision density <strong>and</strong> its adjointscores mf(P nl) in the m-th collision of the history.Mikhailov shows in a similar way 36that by scoringms,„ = f(p,;,) E g(p;,)n=iin the m-th collision of a history, the final score is an unbiased estimate, of the bilinear formB = JdPiKP)W)g(P)where g(P) is an arbitrary (bounded) function. Mikhailov also generalizes the procedure forbilinear forms of a collision density <strong>and</strong> an adjoint collision density that evolve in differentsystems. Such forms play a role in perturbation calculations.B. CORRELATION OF ESTIMATORSWhen estimating the very same reaction rate by several different estimators in one game,the optimum (minimum variance) combined estimate depends on the correlation of theestimators. We give here the moment equation that governs the product of the scores fromdifferent correlated estimators. Approximate solution of the equation may be of use in apriori optimization of the combined estimators.Let f(P,P') <strong>and</strong> g(P,P') be two partially unbiased estimators. They score in an intercollisionflight between P <strong>and</strong> P' in a game that estimates some reaction rate R. This meansthat|dP'T(P,P')f(P,P') = JdP'T(PJ 3 Og(TOP')" I(P)<strong>and</strong> the expected score in the game satisfies Equation (5.57):M 1(P) = I(P) +JdP"L(P,P")M,(P")h(P,P') = f(P,P') -g(P.P)then the expected final score with the estimator h(P,P') is zero <strong>and</strong> the variance of the score,D n(P), follows from Equation (5.60):D n(P) = JdP'T(P,P')h 2 (P,P') + |dP"L(P,P")D n(P") (5.370)Let M x(P) denote the expectation of the product of the scores with f(P,P') <strong>and</strong> g(P,P'). ThenD 2 (P) = Mf(P) + Mf(P) ^ 2M x(P) (5.371)
290 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationswhere M 2e)(P) is the second moment of the score with the estimator e (e = f,g). Thesesecond moments satisfy Equation (5.59):M 2e,(P) = jdP'T(P,P')e 2 (P,P') + 2|dP'T(P,P')e(P,P')JdP"C(P',P")M,(P")f dP" L(P, P") Mf(P") (5.372)Inserting Equations (5.371) <strong>and</strong> (5.372) into Equation (5.370), we have the equation of thecorrelation term:MjP) = jdP"r(P,P')f(P,P')g(P.P')fdP'T(P,P')[f(P,P') + g(P,P')JJdP"C(P',P")M,(P") + jdP"L(P,P")M x(P")C. MOMENT-GENERATING EQUATIONAn equation governing the expectation of an arbitrary score function in a nonmultiplyinggame was derived in Section 5.II.B [cf. Equation (5.50)]. For analog games with a reactionindependentcontribution function f(P,P'), the equation has the formM{F(s)}(P) -JdP'T(P.P')c a(P')F[f(P,P')]+ I dP'T(P,P') |dP"C(P',P") V ' MI f"(P,P') F(S)I(P") (5.373)J J „-o n! f ds" JLet us choose the function F in the formF(s) = e Xl (5.374)with some arbitrary real X. Then obviouslyoT~ KdX k F(S) X_ 0= S*i.e., the expectation of F(s) is the moment-generating function of the score. Inserting Equation(5.374) into (5.373), we have the equation governing the moment generator:M{e xs }(P) = JdP'T(P,P')c a(P')e x f ( p - p , )IdP'T(P,P')e M
291single type are present <strong>and</strong> various events may only lead to the increase or decrease of suchparticles. In many particle transport problems, however, reactions may result in the appearanceof particles different from the one entering the reaction. For example, in neutrontransport problems, collisions of neutrons with matter often produce gamma particles, <strong>and</strong>.in radiation damage calculations, atoms of the structural material that are knocked out cfthe lattice may also be interesting from a simulational point of view. In such cases, differentparticles obey different transport equations. Similarly, the number of moment equations tobe established is equal to the number of different particle types if different particles scoredifferently in a <strong>Monte</strong> <strong>Carlo</strong> simulation. These equations are often coupled to each other.In this Section, we investigate a simple case when two types of particles may appearin the system. The first type originates from an external source, the second may only beproduced in collisions of the first type of particle. We shall assume that free flights of bothtypes of particles are described by transition kernels of the structure introduced in Section5.I.D. (This means that no charged particles are considered.) The collision kernel of thefirst type of particle (for brevity, we call them neutrons) is written in the general formC(P';P",P 7)dP"dP 7C 7(P') C 7(P',P") T n(P',P 7)+ E c r(P')C r(P',P")8(P 7- P) dP"dP 7(5.376)whereJdP"C 7(P',P") = 1 (5.377)JdP 7F n(P',P 7) = v, Y(5.378)C 7(P') + 2 c r(P') = 1 (5,379)The kernels C r(P',P") are analogous to those discussed in Section 5.1. 1). The kernel inEquation (5.376) has the following obvious meaning: a collision of a neutron gives rise tothe production of particles of the second type (they will be called gamma particles) with aprobability C 7<strong>and</strong> a reaction r, with the participation of neutrons only taking place with aprobability c r. The postcollision coordinates of the neutrons in a gamma-producing reactionare determined by the density C 7. [If gamma production is due to neutron absorption,C 7(P',P") = 8(P' — P), by analogy to the pure neutron absorption in Equation (5.35).] Thenumber of gamma particles born in the collision is v . The gamma particle starts from thedensity F n/v 7. The collision kernel may also be written in the shortened formC(P';P",P 7) = C 7(P')C 7(P',F)T n(P',P 7) + C 0(P',P")8(P 7- P) (.5.380)where C„ is equivalent to the kernel in a pure neutron problem. The collision kernel of thegamma particle has the formT(P',P") = 2g r(P')r r(P',P") (5.381)where2 g r(P') = i
292 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculations<strong>and</strong> it can be interpreted the same way as the neutron kernel C 0(cf. Section 5.I.D). Thetransition kernel of the neutrons will be denoted by T(P,P') <strong>and</strong> is assumed to have the formin Equation (5.32). The transition kernel of gammas has a similar form:u,(P')expj - J dtu,(r + tw,E) |8(E -E')dE'dD0(P,P')dP' = ) if P' = (r + Dw,E), DS=O0 otherwise (5.382)for a transition from P = (r,w,E). A coupled simulation of the particles' transport maythen be performed as follows. <strong>Neutron</strong>s are tracked according to the simulation steps inSections 5.1.C <strong>and</strong> D, except that v ygamma particles are produced in a collision with aprobability C 7. In the case of gamma production, the postcoliision coordinates of the neutronare selected from C 7. The coordinates of the gamma-producing reaction are stored in a bank.It the history of a neutron is terminated, the produced gamma particles are recalled fromthe bank (their starting directions <strong>and</strong> energies are selected from Tjv y) <strong>and</strong> they are processedagain according to the conventional simulation steps, using the kernels in Equations (5.381)<strong>and</strong> (5.382).An obvious modification of the procedure is that v 7c 7gamma particles are produced inevery neutron collision, <strong>and</strong> the postcoliision neutron coordinates are selected from C 7witha probability C 7<strong>and</strong> from CJ(I — C 7) with the complementary probability.Now, if in a coupled simulation both the neutron <strong>and</strong> the gamma histories produceestimates of reaction rates connected to the neutron <strong>and</strong> gamma collision densities, respectively,then, at first glance, the moment equations seem to work separately with no alterationsof the two estimation procedures. Indeed, since the appearance of the gamma particles hasno effect on the neutron histories, the moment equations derived in Chapters 5.1 through5.IV apply to the neutron scores if one takesC(P',F') = JdP 7C(P',P",P 7)for the collision kernel. Similarly, when a gamma particle is produced, its score is notinfluenced any more by the neutron field <strong>and</strong>, therefore, the moments of the score due toa gamma particle starting from a given point satisfy the equations derived earlier with thekernels in Equations (5.381) <strong>and</strong> (5.382). The final expected gamma score, however, isconnected to the neutron transport, since it is the neutron collision density that representsthe source of the gamma particles. Thus, if M 1(P) denotes the expected gamma score dueto a gamma particle started from P <strong>and</strong> vp(P) is the neutron collision density, then the finalexpected gamma score readsR = JdPi|/(P)c 7(P)A(P) (5.383)On the other h<strong>and</strong>, the reaction rate in Equation (5.383) can be interpreted as a conventionalneutron reaction rate with a weighting functionf(P) = C 7(P)A(P) (5.384)The particular feature of this coupled game when it is described as an estimation procedureof the "neutron reaction rate" in Equation (5.383) is that no deterministiccontribution
293function is available that would yield an estimate of this reaction rate. Obviously, theweighting function f(P) in Equation (5.384) may only be represented by actual (r<strong>and</strong>om)estimates of if,(P). This peculiarity of the coupled game is demonstrated below by derivingthe moment equations concerning the gamma score.For the sake of simplicity, let us assume that both the neutron <strong>and</strong> gamma proceses arenonmultiplying <strong>and</strong>, at most, one gamma particle may appear in a neutron collision (y =1). In what follows, we shall forget about the possible estimation procedure of a real neutronreaction rate, which is independent of the gamma field, <strong>and</strong> we consider the neutron gamefrom the point of view of the estimation of the gamma reaction rate in Equation (5.383).Thus, when talking about a score, we shall always mean a contribution to the gammaestimate.Let TT(P,s)ds denote the probability that a score in ds about s is accumulated in a neutronhistory started from P. Furthermore, let p 7(P,s)ds be the probability that a score in ds abouts is gathered in a gamma history started from P. Then obviouslyJf 1(P) = Jds • s • p 7(P,s)<strong>and</strong> at the same time p (P,s) can be interpreted as the contribution probability density of agamma-producing neutron collision at P. Since p 7is a real probability density <strong>and</strong> not adelta function, we find that the contributions in the coupled game are not deterministic. Anequivalent interpretation of p 7is that it is the probability density of a score c 7(P)s in aneutron collision (irrespectively of the reaction). Therefore, in a neutron collision at P', theprobability that a score in ds about s is obtained is P 7(P',s/c 7(P'))ds/e 7(P'). Since in nonmultiplyinganalog games no other event contributes to the (gamma) score, the contributionprobabilities in the score probability Equation (5.45) readPa(P',S) = P S(P',P",S) =P,(P',S/C 7(P'))/C T(P')<strong>and</strong>p(P,P',s) =8(s)Hence, the score probability equation (5.45) becomesTT(P 1S) = JdP' T(P,P') c B(P') P 7(P',s/c 7(P'))/c 7(P')+ JdP'T(P,P')JdP"[C(P',P")/c 7(P')]p 7(P',s/c 7(P')) * TT(P",s) (5.385)Now, if M r(P) denotes the r-th moment of the score due to a neutron started from P, i.e.,ifM r(P) = Jdss r Tr(P,s)then the first-moment equation follows from Equation (5.385)M 1(P) - dP'T(P,P')c(P') Jl 1(P') + dP'T(P,P') dP''C(P',F)M 1(P") (5.386)
294 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> CalculationssinceC 2(P') + jdP"C(P',P") = 1for the neutron game is nonmultiplying. Equation (5.386) reflects the heuristically obviousfact that the expected contribution of a neutron scattering is equal to C 7times the expectedcontribution of the induced gamma history. The equation could have been introduced bythis heuristic argument (similar to the derivation of the bilinear moment equation in SectionA.) The second moment of the score, however, is not as obvious as the expectation, but itfollows easily from Equation (5.385). Multiplying the equation by s 2<strong>and</strong> integrating withrespect to s, we haveM 2(P) = jdP'T(P,P') C 7(P').M 2(P') + 2C 7(P^iI 1(POJ dP"C(P',P")M,(P")+ JdP'T(P,P')JdP" C(P',P") M 2(P") (5.387)whereJzL 2(P) = Jdss 2 p T(P,s)the second moment of the score in the gamma history started from P, which satisfies asecond-moment equation of the form in Equation (5.59) after substituting the kernels inEquations (5.381) <strong>and</strong> (5.382).An approximate solution of Equations (5.386) <strong>and</strong> (5.387) is possible, e.g., by successiveapplication of one of the approximate methods discussed in this Chapter.Although the derivation above concerns analog nonmultiplying games, extension of theconsiderations to multiplying neutron <strong>and</strong> gamma processes <strong>and</strong> to nonanalog games is onlya matter of routine application of the techniques introduced in Chapters 5.1 through 5.IV.Note that a similar coupled moment-equation system is obtained in specific monopartieleproblems. Thus, for example, in criticality calculations (discussed in Chapter 6.Ill by differenttools), the successive neutron generations may also define successively coupled momentequations. Similarly, the resonance integral calculation method proposed by Spanier<strong>and</strong> Ge I bard 42can also be formulated in a manner analogous to that above.Coupled neutron-gamma calculations are common <strong>Monte</strong> <strong>Carlo</strong> practice; nevertheless,no thorough investigation has so far been conducted regarding the efficiency of the game,<strong>and</strong> this field is still open for systematic research.APPENDIX 5A*SOLUTION OF THE MOMENT EQUATIONS IN THE FORWARD-BACKWARD MODELThere are a few cases when the moment equations can be solved analytically. One ofthe most realistic of them is discussed here; a still simpler model is given in Appendix 5C.Let us consider an infinite homogeneous nonmultiplying slab situated perpendicularly to thex axis between x = 0 <strong>and</strong> x = X. Assume that the total cross section of the material fillingthe slab is unity (cr = I) <strong>and</strong> that the mean number of secondaries per collision is denotedby c (c < I). Assume also that any collision in the slab leaves the energy of the particleunchanged (monoenergetic approximation) <strong>and</strong> that the direction of the flight after a collision
295is either parallel to the direction before the collision or is reversed with equal probab1/2. This model is called the forward-backward or Fermi scattering model. We cons-(problem where particles are impinging perpendicularly upon the surface at x = Cpositive direction (parallel to the positive x axis) with a density of one particle pesurface <strong>and</strong> unit time. Under these assumptions, the transition <strong>and</strong> collision kernels take onthe formsT(P,P')dP' = T(x,x')dx' = e^'-^dx'(A.i)for x,x' e [0,X], <strong>and</strong>C(P',P")dP" = I TS(M- ~ 1) + 8(u, + l)|d(x (A.2)where p. is the cosine of the scattering angle. Let M(x, ±) denote the moment of some scoredue to a particle starting from x in positive/negative direction, <strong>and</strong> letM(x) - M(x,+) + M(x,-)The equations that describe these moments follow from Equation (5.15) asM(x, + ) = I(x, + ) + J ajc'e-^-"^ M(x')(A.3)<strong>and</strong>M(x,-) = I(x,-) + dx'e- ( *- 1^M(X') (A.4)Jo 2Addition of the two equations yields the equation for the direction-independent moment:M(x) = I(x) + £ f dx'e- ( *- x , ) M(x') + ^ ) dx'e^-^ M(x') (A. 5)2 Jo 2 AwithI(x) = I(x, + ) +I(x,-)Since the source particles start from x = 0, the eventually interesting quantity is the valueof the moment at x = 0, i.e., M(O). The solution of Equation (A.5) is rather simple.Differentiation of Equation (A.5) with respect to x yields-M(x) - — I(x) - - dx'e- ( *"*'>M(x') + ~ dx'e-*"'- x >M(x') (A.6)dx ix dx 2 Jo 2 Jx<strong>and</strong>~ M(x) = (1 - c)M(x) + ~f- 2I(x) I(x)dx 2 dx 2
296 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> CalculationsThe boundary conditions to the latter equation follow from Equations (A.6) <strong>and</strong> (A.5) bytaking them at x = 0 <strong>and</strong> x = X:dMdx"dlM(O) = -~dx- 1(0)(A.7)dMdxdl+ M(X) = -x = xdxI(X)(A. 8)The results of this appendix will be applied to cases when the function f" — 1 on the RHSof the differential equation is the sum of terms of the formIN2 M'e-*»[ = UTherefore, we consider the equation in the special formdx 2 M(x) - ( 1 - c)M(x) = 2 b.x'e-*" (A. 9)d 2The general solution of the homogeneous equation corresponding to Equation (A.9) isM holn(x) = Ae- +Be(A. 10)withv = Vl - c(A.ll)A particular solution is sought in the formmM par(x) = £ «, x 1 C-i = o(A. 12)Inserting Equation (A.12) into Equation (A.9), we havemm2 a,[i(i - l)x'- 2 - 2i#x'-' + (# 2 - 1 + c)x'] = ^ b,x'ori = 0 i = 0m - 22 Ia 1 + 2(I + l)(i + 2) - 2a 1+1(i + 1)« + a,(^2- 1 + c)]x'i - 0+ [-2a mnvd 4 a m,CO 2 - 1 + c)]x m "' + a m(-f) 2 - 1 f c)x m = ^NIi =0b, x 'Comparison of the coefficients of x' yieldsa m= b m/(tf 2 - 1 + c)(A. 13)a m_, = (b m, + 2m{)aJ/(d 2 - 1 + c)(A. 14)
297while all the other coefficients follow from the recurrencea, = {b, + (i + l)[2a w,t) - a 1 + 2(i + 2)|}/(-f) 2 ~ 1 + c); i = 0,1....m-2 (A.15)Thus, a general solution to Equation (A.9) is the sum of the solutions in Equations (A 10)<strong>and</strong> (A. 12):mM(x) == Ae" + Be ''- + 2 "* (A. 16)i = nCoefficients A <strong>and</strong> B are fixed by the boundary conditions in Equations (A.7) <strong>and</strong>(A.asA(I - v) + B(I + i;) = a, - b, - (a 0- b 0)( 1 + •») (A. 17)<strong>and</strong>A(I + v)e" x + B(I - v)e-" x = 2 (b, - a^X'-Ji + (1 - ff}Xjei = 0inv X(A. 18)Solutions of this algebraic equation system provide the explicit form of the moment inEquation (A. 16). The final result of the derivation is the score moment due to a starter atx = 0:M(O) = A + B + a„ (A. 19)APPENDIX 5B:SECOND MOMENTS OF MULTIPLE CONVOLUTIONSFor the determination of the second moment of the score in a multiplying game, it isnecessary to evaluate the expectations of convolutions. A general form of such expectationscan be written asE(x,,x 2,...,x„) = j jiss 2 j ^ds,...J ds n Il Tf(X 15S 1-a,)(B.I)whereJ dss r Tr(x,s) = MJx)MJx) - 1<strong>and</strong>a, = a(Xj)
298 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> CalculationsIn the calculations, the following identity is used:E Si + b) = E (S 1- a,) 2 + EE is, a,)(s k- a k)2 E (s, - a,)( E a k+ b E a, + b (B.2)With the aid of this identity, Equation (B. i), after performing in the integrations, becomesa sum of four terms according to the brackets in Equation (B.2), i.e.,E(X 1,X 2,...,X N) = E 1+ E 2+ E 2+ E 4The first term readsE 1= ds,... ds„ E (s, - a s) 2 II Tr(x 15s, - a,)n r^-, n= E ds,(s, - a,) 2 Tr(X 1,s, ~ a,) = E M 2(X 1)SimilarlyE 2= EEds. ds k(s, a t)Tr(X 15S 1-a i)(s k~a k)Tr(x k,s k-a k)i = 1 k = 1 -' _ °°_°°= EE M 1(X 1)M 1(X,)= 1 k= 1<strong>and</strong>E 3= 2 E M 1(X 1)(E a k+ b)i = 1 Vk= 1 /= 2 E M 1(X 1Ja 1+ 2 EE M 1(X 1Ja, + 2b E M 1(X 1)= Ik= 1k*iE 4= (E a, + b) 2 = E a? + 2b E a, + b 2 + EEa,aVi=I / i = 1 i - 1 i=lk = lHenceE(X 1 5X 2....,X N) = b 2 + 2b E [M 1(X,) + a,] + E IM 2(X 1) + 2M 1(X 1Ja 1+ a 2 ]i-ii=ii=lk=l[M 1(X 1) + a,][M,(x k) + a k] (B.3)
299In the derivation of the second moment of an ordinary multiplying game (Section 5.III.B),this expectation is multiplied by the product of the collision kernels. Denoting the collisionkernel, for the sake of brevity, by C(X 1), the quantity to be evaluated isS = JdX 1... I dx„ 0 C(X 1)E(X 1,...,X n) (EA)wheredx C(x) = 1Inserting Equation (B.3) into Equation (B.4) <strong>and</strong> grouping together the products of functionswith identical indices, we haveS = b 2 + 2b X Mx 1C(X 1)[M(X 1) + a,] + ^ Nx 1C(X 1)[M 2(X 1) + 2M,(x,)a, + a?]i - 3 Ji - I J+ {JDX 1C(X 1)[M 1(X 1) + a,]j{Jdx kC(x k)[M,(x t) + ajj (B.5)If the integrals in Equation (B.5) do not depend on the indices of the integr<strong>and</strong>s, thenS = n 2 Q JdxC(x)(a + b) 2 -M r(x)+ n(n - l)*{JdxC(x)[a + M 1(X)]J 2 - (n - l)b 2 (B.6)which is the case with indistinguishable particles.When the variance of a game with collision wise splitting is examined (Section 5. III. D),a ;= 0 <strong>and</strong> Equation (B.3) (with n = m) is first averaged with respect to the probabilitiesz m(m 1), whereEZ m= i<strong>and</strong> then is integrated together with the collision kernel C(x). Indices appear only with thestatistical weights of the split fragments, i.e., M 1(Xj) = (W 0 ) m) rM,.(x). Thus, Equation (B.3)readsE(X 1,...,X 1 1 1) = £ (W 1151J 2 M 2(X) + W y)mW (t)mM 2 (x) + 2 2 W 0 1 1 1 1M 1(X) + b 2
300 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculations<strong>and</strong> Equation (B.4) becomesS = dxC(x) V Z 111E(X 1,...,X 1J= dxC(x) £ z,„ 2 (W 01111) 2 M 2(X) + 22 W 01111W 1111111Mf(X)+ 2b 2 W 0 1 1 1 1M 1(X) + b4j-iJ= [dxC(x) J] z m{S (W 0,,,,) 2 [M 2(X) - MfXx)] + [b + W 111M 1(X)]= (B.7)withmW 111= S w U)mi=i(B.8)Equation (B.7) can be cast into an alternative form. If we denoteW = S z mW mthent 2S --- JdxC(x)|i (J)b-'W'M r(x) - z Qb 2 } + JdXCiX)JI^1 /,„ V( W- W 2 IM 2(X) + v zJw 2 m- I (w (J)m>M 2 (x)(B.9)For the determination of the second moment in a game with geometrical splitting (Section5.IV.B), we put a ;= 0 <strong>and</strong> Equation (B.3) with n = k is averaged with respect to theprobabilities g k(k s- 1) such thatThen Equations (B.7) through (B.9) apply with m = k <strong>and</strong> z m=g,.APPENDIX 5C:SOLUTION OF THE MOMENT EQUATIONS IN THE STRAIGHT-AHEAD SCATTERING MODELThe model investigated in the straight-ahead approximation is identical to that of theforward-backward model in Appendix 5A, except that any particle leaving a collision retainsits precollision direction. Accordingly, the collision kernel, with the notations of Appendix5A, readsC(P',P")dP" = c8((x -l)d|x
(1 - - -ft) 2— aeexlciX'c - fl) (1 - c(C 6)The moment equations take on the formMilM(x) = I(x) + dx'e "'•" 1 CM(X')(CI)Differentiating Equation (Cl) with respect to x, we haved d f xdxdxM,(x) = — I(x) - cM(x) + J dx'e-- (x '" • 0 CM(X')AI(x) - I(x) + (1 - c)M(x)(C.2)dx<strong>and</strong> the boundary condition follows from Equation (Cl) asM(X) = l(X)(C.3)The solution of Equations (C.2) <strong>and</strong> C.3) is easily obtained asdM(X) = I(X)e ( '- c X X - x ) - J < dx'e ' p - (1 ••CHx' - x) 7 l(x') - I(x')dx= I(x) + c j dx'e-"-^' T(x')(CA)xIn the special case whenl(x) - ax'e 0 "(CS)the solution readsci(i ••• I)X 1 "M(x) - ae , , x x' +(1 - c - if) (1 - c - d) 2 (1 - c - WSpecifically for i = 0 [when I(x) = ae*"], the moment in the straight-aheadreadsapproximatiorM(x) = ae flx [l - •d - ce- ( 1 -- i , , < x •''!/(I r» (CJ)REFERENCES1. Amster, H. J. <strong>and</strong> Djomehri, M. J-, Prediction of statistical error in <strong>Monte</strong> <strong>Carlo</strong> transport calculations,Nucl. Sci. Eng., 60, 131, 1976.2. Amouyal, A. <strong>and</strong> Benoist, P., Nouvelle Methode de Determination dc Facieur d'Utiiisation Thcrrakji'.;d'une Cellule, Rapport CEA No 517, 1956.3. Booth, T. E. <strong>and</strong> Amster, H. j . , Prediction of <strong>Monte</strong> <strong>Carlo</strong> errors by a theory generalized to treat tracklength estimators, Nucl. Sci. Eng., 65, 273, 1978.
302 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculations4. Booth, T. E. <strong>and</strong> Cash-well, E. D., Analysis of error in <strong>Monte</strong> <strong>Carlo</strong> transport calculations, Nucl. ScLEng., 71, 128, 1979.5. Booth, T. E., Analysis of Error in <strong>Monte</strong> <strong>Carlo</strong> <strong>Transport</strong> Calculations, thesis, LA-7636-T Report, LosAlamos Scientific Laboratory, Los Alamos, 1979.6. Carter, L. L. <strong>and</strong> Cashwell, E. D., <strong>Particle</strong> <strong>Transport</strong> Simulation with the <strong>Monte</strong> <strong>Carlo</strong> Method, TID-26607, Technical information Center, U.S. Energy Research <strong>and</strong> Development Administration, 1975.7. Case, K. M., de Hoffmann, F., <strong>and</strong> Placzek, G., Introduction to the Theory of <strong>Neutron</strong> Diffusion, Vol.1, Los Alamos Scientific Laboratory, Los Alamos, 1953.8. Case, K. M. <strong>and</strong> Zweifel, P. F., Linear <strong>Transport</strong> Theory, Addison-Wesley, Reading, MA, 1967.9. Dwivedi, S. R., Zero variance biasing schemes for <strong>Monte</strong> <strong>Carlo</strong> calculation of neutron <strong>and</strong> radiation transportproblems, Nucl. Sci. Eng., 80, 172, 1982.10. ErmakoY, S, M., <strong>Monte</strong> <strong>Carlo</strong> Method <strong>and</strong> Related Problems, Nauka, Moscow 1971, (in Russian); Die<strong>Monte</strong> <strong>Carlo</strong> <strong>Methods</strong> und Verw<strong>and</strong>te Fragen, Oldenburg Verlag, Munchen, 1975, (in German).11. Gelbard, E. M., Streaming in lattices, Adv. Nucl. Sci. TechnoL, 15, 223, 1984.12. Goertzel, G. <strong>and</strong> Kalos, M. H., <strong>Monte</strong> <strong>Carlo</strong> methods in transport problems, in Progress in NuclearEnergy, Series I, Physics <strong>and</strong> Mathematics, Vol. 2, 1958, 315.13. Gupta, H. C, A class of zero-variance biasing schemes for <strong>Monte</strong> <strong>Carlo</strong> reaction rate estimators, Nucl.Sci. Eng., 83, 187, 1983.14. Hoogenboom, J. E., Optimum biasing of integral equations in <strong>Monte</strong> <strong>Carlo</strong> calculations, Nucl. Sci. Eng.,70, 210, 1979.15. Hoffman. T. J., <strong>Monte</strong> <strong>Carlo</strong> source biasing optimization, Nucl. Sci. Eng., 69, 76, 1979.16. Juzaitis, R. J., Predicting the cost of splitting in <strong>Monte</strong> <strong>Carlo</strong> particle transport, Nucl. Sci. Eng., 80, 424,1982.17. Kahn, H., Modification of the <strong>Monte</strong> <strong>Carlo</strong> Method, R<strong>and</strong> Report P-132, R<strong>and</strong> Corporation, Santa Monica,1949.18. Kalos, M. H., Nakache, F. R., <strong>and</strong> Celnik, J., <strong>Monte</strong> <strong>Carlo</strong> methods in reactor compulations, inComputing <strong>Methods</strong> in Reactor Physics, H. Greenspan, C. N. Kelbert, <strong>and</strong> D. Okrent, Eds., Gordon <strong>and</strong>Breach, New York, 1968.19. Khisamiitdinov. A. I., A special class of estimators for <strong>Monte</strong> <strong>Carlo</strong> calculation of functionals of solutionsto integral equations of the second kind, Zh. Vychisl. Mat. Mat. Fiz., 10, 1269, 1970, (in Russian).20. Kschwendt, If. <strong>and</strong> Rief, H., The expected leakage estimator applied to time-dependent neutron transport,.1. Nucl. Energy, 22, 111, 1968.21. Koblinger, L. <strong>and</strong> Lux, I., Comparison of the Efficiencies of Track-Length <strong>and</strong> Collision Density Estimatorsfor Three Simple Geometries, KFKI-1978-41 Report, Central Research Institute for Physics, Budapest,1978.22. Leimdorfer, M., <strong>Monte</strong> <strong>Carlo</strong> method for the anaysis of gamma radiation transport from distributed sourcesin laminated shields, Nucleonics, 6, 58, 1964.23. Leimdorfer, M., On the Transformation of the transport equation for solving deep penetration problemsby the <strong>Monte</strong> <strong>Carlo</strong> method, Trans. Chalmers Univ. TechnoL, 286, 1964.24. Leimdorfer, M., On the use of <strong>Monte</strong> <strong>Carlo</strong> methods for calculating the deep penetration of neutrons inshields, Trans. Chalmers Univ. TechnoL, 287, 1964.25. Lewins, J., Importance. The Adjoint Function, Pergamon Press, Oxford, 1965.26. Lux, I., Unified definition of a class of <strong>Monte</strong> <strong>Carlo</strong> estimators, Nucl. Sci. Eng., 67, 107, 1978.27. Lux, I., Note on prediction of <strong>Monte</strong> <strong>Carlo</strong> errors, Nucl. ScL Eng., 67, 139, 1978.28. Lux, I., Systematic study of some st<strong>and</strong>ard variance reduction techniques, Nucl. ScL Eng., 67, 317, 1978.29. Lux, I., Remark on the theory of nonanalog <strong>Monte</strong> <strong>Carlo</strong> games, Atomkernenergie, 31, !54, 1978.30. Lux, I,, Remark on the efficiency of track-length estimators in reaction rate estimations, Nucl. ScL Eng.,66, 258, 1978.31. Lux, I., Variance <strong>and</strong> Efficiency in <strong>Transport</strong> <strong>Monte</strong> <strong>Carlo</strong>, KFKI-1979-35 Report, Central ResearchInstitute for Physics, Budapest, 1979.32. Lux, 1., Variance versus efficiency in transport <strong>Monte</strong> <strong>Carlo</strong>, Nucl. Sci. Eng., 73, 66, 1980.33. Lux, I., Do We Play Multiplying <strong>Monte</strong> <strong>Carlo</strong> Efficient?, KFKI-1985-05 Report, Central Research Inst,for Physics, Budapest, 1985.34. Maynard, C W., Blackness theory <strong>and</strong> coefficients for slab geometry, Nucl. ScL Eng., 6, 174, 1959.35. Maiorov, L. V. <strong>and</strong> Frank-Kamenietzky, A. D., Relative Efficiency of Various <strong>Monte</strong> <strong>Carlo</strong> Estimators,IAE-1791 Report, Kurchatov Institute of Atomic Energy, Moscow, 1969 (in Russian).36. Mikhailov, G. A., Estimation of nonlinear functionals <strong>and</strong> approximate calculation of transport theoreticgroup constants by <strong>Monte</strong> <strong>Carlo</strong> method, Zh. Vychisl. Mat. Mat. Fiz., 8, 590, 1968 (in Russian).37. Mikhailov, G. A., On a class of <strong>Monte</strong> <strong>Carlo</strong> estimators, Theoria Veroiatnostiei Primenenia, 15, 142,1970 (in Russian).38. Rief, H. <strong>and</strong> Kschwendt, H., Reactor analysis by <strong>Monte</strong> <strong>Carlo</strong>, Nucl. Sci. Eng., 30, 395, 1967.
3«;39. Rief, H. <strong>and</strong> Fioretti, A., <strong>Monte</strong> <strong>Carlo</strong> shielding analysis using deep penetration biasing schemes combinewith point estimators <strong>and</strong> algorithms for scoring of sensitivity profiles <strong>and</strong> finite perturbation effects, iProc. 6th ICRS, Vol. 1, Tokyo, 1983, 199.40. Rief, H., Generalized <strong>Monte</strong> <strong>Carlo</strong> perturbation algorithms for correlated sampling <strong>and</strong> a second onkTaylor series approach, Ann. Nucl. Energy. 11, 455. 1984.41. Sarkar, P. K. <strong>and</strong> Prasad, M. A., Prediction of statistical error <strong>and</strong> optimization of biased <strong>Monte</strong> Car'transport calculations. Nucl. Sci. Eng., 70, 243. 1979.42. Spanier, J. <strong>and</strong> Gelbard, E. M., <strong>Monte</strong> <strong>Carlo</strong> Principles <strong>and</strong> <strong>Neutron</strong> <strong>Transport</strong> Problems, AddisoiWesley, Reading, MA, 1969.43. Spanier, J., A new multi-stage procedure for systematic variance reduction in <strong>Monte</strong> <strong>Carlo</strong>, in Proc. ConjNav Developments in Reactor Math <strong>and</strong> Applications, Vol. 2, U.S. Atomic Energy Commission, idahFalls, ID, 1971, 760.44. Stuart, G. W., Multiple scattering of neutrons, Nucl. Sd. Prig., 2, 617, 1957.45. Woodcock, E. R., et al,, Techniques used in the GEM code for <strong>Monte</strong> <strong>Carlo</strong> neutronics calculations ireactors <strong>and</strong> other systems of complex geometry, in Proc. Conf. Application of Computing <strong>Methods</strong> tReactor Problems, ANL-7050 Report, Argonne National Laboratory, 1965, 557.
305Chapter 6SPECIAL GAMESIn the majority of <strong>Monte</strong> <strong>Carlo</strong> applications, the final goal of the procedure is theestimation of a reaction rate of the type in Equation (5.2). The weighting function in theexpression of the reaction rate is usually some cross section or a smooth functional of across section. In such cases, the moment equations investigated in Chapter 5 describe themain characteristics of the <strong>Monte</strong> <strong>Carlo</strong> schemes applicable to the estimation. There are,however, certain fields of <strong>Monte</strong> <strong>Carlo</strong> applications where either the weighting function inthe reaction rate is singular (e.g., estimation of the particles' flux at a point) or the resultof the simulation is not a reaction rate of the conventional form (e.g., eigenvalue estimationor sensitivity analysis). On the other h<strong>and</strong>, in certain cases, although reaction rates are tobe determined, it is more efficient to use special procedures rather than the conventionalschemes. This is the case when the effect of small changes in the material properties onsome reaction rates is to be estimated. For this purpose, the use of the so-called correlated<strong>Monte</strong> <strong>Carlo</strong>, discussed in Chapter 6.1, is an efficient tool. Procedures for the estimation ofderivatives <strong>and</strong> sensitivity of a reaction rate with respect to some system parameters followfrom the correlated <strong>Monte</strong> <strong>Carlo</strong> procedures. Unbiased estimation schemes of such derivativesare discussed in Chapter 6.II. Special problems associated with the estimation of eigenvalues<strong>and</strong> especially of the effective multiplication factor of a fissile system are considered inChapter 6.III. Techniques for the estimation of flux (or collision density) at a given spatia!point are reviewed in Chapter 6.IV.A number of <strong>Monte</strong> <strong>Carlo</strong> techniques developed for special purposes, such as conditional<strong>Monte</strong> <strong>Carlo</strong>, 10 contribution theory, 11 ' 13,26 ' 71 or recursive <strong>Monte</strong> <strong>Carlo</strong>, 30 will not be detailedhere, partly because of their limited use <strong>and</strong> because their theory is not yet fully elaborated.Introduction of such new techniques make the transport <strong>Monte</strong> <strong>Carlo</strong> methods still moreversatile <strong>and</strong> bring up fresh ideas in the theory <strong>and</strong> practice of particle transport simulation.On the other h<strong>and</strong>, the present trend in the development of <strong>Monte</strong> <strong>Carlo</strong> methods, characterized by the introduction of the more <strong>and</strong> more sophisticated techniques mentioned above,will very likely find a powerful rival due to the appearance <strong>and</strong> spread of parallel computers.The extreme speed of such computers will motivate the users to prepare simple, easilyprogramable codes that take full advantage of the potentialities offered by the parallelprocessors. Economization of the programing effort will gain importance at the expense ofcomputing time. 6I. CORRELATED MONTE CARLO: PKRIT RBAlIONCALCULATIONS<strong>Monte</strong> <strong>Carlo</strong> methods are usually applied when fast deterministic methods fail to workfor some reason. Thus, the use of <strong>Monte</strong> <strong>Carlo</strong> simulations for the estimation of reactionrates in subregions of a complex system is indicated. Assume, that in such a system not onlyreaction rates, but also their changes due to some small alteration of the system are to bedetermined. It would seem logical to perform the <strong>Monte</strong> <strong>Carlo</strong> calculation twice, first in theoriginal (unperturbed) system <strong>and</strong> then in the altered (perturbed) system, <strong>and</strong> to calculatethe difference of the two estimates. In the case of small perturbations, however, the separateestimates must be very accurate if we wish to obtain a reliable estimate of the reaction rateperturbation; otherwise, the uncertainties in the independent estimates override the effect ofthe perturbation. On the other h<strong>and</strong>, by using the same trajectories for the estimation ofboth the unperturbed <strong>and</strong> perturbed reaction rates, the respective estimates will be stronglycorrelated <strong>and</strong> are expected to deviate from their expectations in the same direction.
306 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> CalculationsConsequently, their difference is expected to have a smaller uncertainty than the correspondingdifference in the uncorrected simulation. This is the main idea behind the correlated<strong>Monte</strong> <strong>Carlo</strong> method discussed in this Chapter.Let the perturbed system be characterized by the transition kernel T(P,P') <strong>and</strong> collisionkernel C(P',P"), <strong>and</strong> let the corresponding kernels in the perturbed system be T(P,P') <strong>and</strong>C(P',P"). For the sake of simplicity, we assume that both systems are finite <strong>and</strong> nonmultiplying.Extension to multiplying cases goes along the lines followed in Chapter 5.III.Unless otherwise stated, we shall assume that the correlated simulation is performed accordingto the unperturbed kernels, <strong>and</strong> the parallel game in the perturbed system is playedby introducing appropriate statistical weights, for convenience, we shall always talk abouttwo particles migrating in parallel (along identical trajectories). One is analog, which scoresin the unperturbed system <strong>and</strong> has a weight of unity; the other is a nonanalog particle,which should migrate in the perturbed system <strong>and</strong> therefore carries a statistical weight thataccounts for the difference between the unperturbed <strong>and</strong> perturbed systems.Thus, the game is analog as far as the estimate in the unperturbed system is concerned<strong>and</strong> nonanalog with respect to the estimation in the perturbed system. Such a correlatedgame will be called an unperturbed analog game. In the opposite case, when the game isplayed according to the perturbed kernels <strong>and</strong> statistical weights are introduced in the estimationof the unperturbed reaction rate, we talk about a perturbed analog game.Let I|J(P) <strong>and</strong> t\i(P) be the collision densities in the unperturbed <strong>and</strong> perturbed systems,respectively, <strong>and</strong> assume that the quantity to be determined is the reaction-rate difference8R = JdPiKP)f(P) -JdPiKP)f(P)If the source densities in the unperturbed <strong>and</strong> perturbed systems are denoted by Q(P) <strong>and</strong>Q(P), respectively, then according to the results in Section 5.1.A8R = JdPQ(P)M 1(P) IdPQ(P)M 1(P)dPQ(P)Q(P)Q(P)M 1(P) -M 1(P)where M 1(P) <strong>and</strong> M 1(P) are the expected scores in the unperturbed <strong>and</strong> perturbed systems,respectively, due to a unit weight starter. Now, starting the nonanalog particle with a weightW-- Q(P)/Q(P)from the analog source density <strong>and</strong> recording the difference of the nonanalog <strong>and</strong> analogscores, the variation of the reaction rate due to the perturbation is estimated. The varianceof this estimate, however, does not follow as easily as the first moment from the variancesof the uncorrelated ("single-particle") simulation. A slight generalization of the singleparticlemoment equations, nevertheless, will solve this problem. Equations describing momentsof functions of correlated scores are derived in the next section. The conditions ofthe feasibility of a correlated game are established in Section P>. Estimators of a correlatedscore difference are briefly discussed in Section C. The variance of the difference of thecorrelated scores is investigated in Section 1), <strong>and</strong> conditions are established under whichthe unperturbed analog game yields a lower variance than the perturbed analog game. Finally,alternative methods of calculating perturbations are reviewed in Sections F <strong>and</strong> G.
3©7A. CORRELATED MOMENT EQUATIONSIn the considerations below, we assume that the contribution function in both the analog<strong>and</strong> nonanalog (unperturbed <strong>and</strong> perturbed) games is f(P,P'), i.e., that a free flight from apoint P = (r,
P308 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculations(Note again that the game is played in the unperturbed system with the kernels T anc C,<strong>and</strong> the perturbed system is described by the kernels t <strong>and</strong> C. Thus, the correlated game isnonanalog from the point of view of the perturbed system, <strong>and</strong> in the generation of thestatistical weights, T <strong>and</strong> C play the role of the nonanalog kernels. This is why the kernelswith <strong>and</strong> without a hat ( A ) in Equations (6.3) <strong>and</strong> (6.4) changed place in comparison withEquations (5.142) through (5.146).J According to Theorem 5.2, the moment Equation (6.1)has a unique solution in a finite nonmultiplying system ifsup JdPT(P 7P') JdPT(P',P") = supJdP"L(P,P') < 1 (6.5)<strong>and</strong> the solution can be written in the form of a Neumann series in Equation (5.23) asM(F)(P 01W) = J JdPJ JdP 1... JdP nJdP nJdP n ;11 T(P 1^PJ)C(PJJ') T(P 1 1^ 1K(P n + 1)FX w'(i)f(p,_,,p;)(6.6)where P 1' --• (F 11W 1,,E 1..,) denotes the phase-space point where the correlated particles entertheir i-th collision, <strong>and</strong> P 1= (F^Co 17E 1) represents the phase-space point where they emergefrom the i-th collision. Details of the derivation of Equation (6.6) are given in Reference48. Instead of entering into mathematical discussions, we note that the argument of thefunction F in Equation (6.6) is just the score accumulated in a history consisting of thepoints P 0, PJ, <strong>and</strong> P,, . . . ,P n, <strong>and</strong> P n +,, <strong>and</strong> the product of the kernels in the integr<strong>and</strong> isthe probability of this history. Consequently, the expectation of the score function F is indeedthe integr<strong>and</strong> integrated over the possible collision points of a history of n P 1 collisions<strong>and</strong> summed over the possible number of collisions in a history.It can be seen that whenever the expectation M{F}(P D,W) exists, Equation (6.6) can berewritten asm{f}(p ( ).w) =jdp;c(p 0,p;)F[W(i)f(P 0,pj)]-i- i fdp;JdP 1...JdP 1',JdP 11JdP n + 1f] T(P 1.,,PJ)C(PJTY)T(P n,P;, + 1){F J WW(TV 17PJ)J (6.7)- IiEW(IK(P 1^PJ)In Equations (6.6) <strong>and</strong> (6.7), W'(i) is the statistical weight vector at the i-th collision pointPJ, i.e,W'(i) = (W'(i),l)ue8<strong>and</strong> by repeated use of the weight generation rules in Equations (6.3) <strong>and</strong> (6.4), we obtainW'(i W II T(P 1. ,,PJVT(P,...,,PJ)r'll' C(PJ,P,)/C(PJ,P 1) (6.8)
309Equation (6.1) will be referred to as the first form of the moment equation <strong>and</strong> Equation(6.7) is called the second form of it. It is convenient to reduce the equations so that theycontain expected scores due to unit weight starters. By analogy to the derivation of Equation(5.55), it is easily seen" that the expected score functions, with an arbitrary weight <strong>and</strong>with unit weight are related as*M{F(s)}(P,W) = M{F(Wos)}fP,l) (6.9;whereWos = (W 1S 1J-S 2)st<strong>and</strong>s for the direct product of the two vectors <strong>and</strong>i = (1,1)When the quantity of interest is the difference of the estimates in the perturbed <strong>and</strong> unperturbedsystems, we putF(s) = S 1- S 2In view of the expected score — equation above — by omitting the unit weight arguments,the expected score difference readsM{s, - s 2}(P,W) = MjWs 1-S 2KP)<strong>and</strong> the equation it satisfies follows from Equation (6.1) asM(Ws 1-- s 2}(P) = jdP'T(P,PJc a(PJ(W' - i) - f(P,PJ+ |dP'T(P,P')jdP"C(P\P")M{W"s, - sJfP")+ |dP'T(P,Pj|dP"C(P',P")(W' - l)f(P,PJM(Ws 1- S 2I(P) = JdP'T(P,P')(W' - Df(P 1PJfdP'T(P,P')|dP"C(P',P")M{W"s, - S 2)(PJTaking note of the expressions of the weights in Equations (6.2) thr A%>$ '*>
310 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationswhere M 1(P) <strong>and</strong> M 1(P) are the expectations of the nonanalog (S 1) <strong>and</strong> analog (s 2) scoresdue to starters from P with weights of unity, respectively, in an unperturbed-analog simulation.These moments satisfy the single-particle moment equations (5.56) <strong>and</strong> (5.57) withrespective kernels <strong>and</strong> with the contribution function f(P,P'). For later use we give here thesecond form of the first moment equation. According to Equations (6.7) <strong>and</strong> (6.8) it readsm{WS, - S 2KP) = 2 Up; dp,.... dp; 1([T(P 1.,,p;)C(p;,p,)T(P n)P;+ I)[W'(n+l) - 1 If(P 1X 1 1) (6.9)In order to make the further derivations simpler let us assume that the particle sources areidentical in the two systems, i.e., also the nonanalog particles start with a unit weight. Thenthe second moment of the score difference readsM{(s, - S 2) 2 J(P) = M 2(P) - 2M{ S]s 2}(P) + M 2(P) (6.10)where M 2(P) <strong>and</strong> M 2(P) are the single-particle second moments defined by Equations (5.58)<strong>and</strong> (5.59) in Section 5.II.C. Thus, from Equation (5.59), with the weights in Equations(6.3) <strong>and</strong> (6.4)M 2(P) = I 2(P) + J dP"L (2)(P,P")M 2(P") (6.11)where I 2(P) represents the terms in Equation (5.58) that do not contain M 2(P) <strong>and</strong>L (2)(P,P") = JdP'T(P,P')C(P',P")w 2 (P,P')w 2 (P',P") (6.12)Let us make it clear again that M 2(P) is the expected second moment of the score in thesingle-particle estimation of the perturbed expected score, M 1(P), when the (nonanalog)game is played according to the unperturbed kernels.Similarly, the analog second moment satisfies the equationM 2(P) = I 2(P) + j dP"L (())(P,P")M 2(P") (6.13)withL Co)(P,P") = JdP'T(P,P')C(P',P") = L(P, P") (6.14)The correlation term in Equation (6.10) satisfies Equation (6.1) with F(s) = S 1S 2, i.e.,M(S 1S 2)(P) " I x(P) + jdP"L (1)(P,P") M(S 1S 2)(P") (6.15)where, again, I x(P) represents the terms in Equation (6.1) that do not contain M(s,s 2} <strong>and</strong>L (1)(P,P") - dP'T(P,P')C(P',P")w(P,P')w s(P',P")
311The second moment of the score difference as it follows from Equation (6.7) will beinvestigated in Section D in more detail. Tn the next section, considerations based onEquations (6.10) through (6.15) are presented concerning the feasibility of a correlated game.B. FEASIBILITY OF A CORRELATED GAMEIn the terminology of Chapter 5, a <strong>Monte</strong> <strong>Carlo</strong> game is feasible if the simulationterminates after a finite number of collisions with a probabTheorem 5.2 that a sufficient conditon for this is that the kerrgoverns the simulation, has a norm less than unity, as stated ih<strong>and</strong>, it was pointed out in Section 5.VIII.B that in order tothe quantity of interest, the score variance in the estimationWe have also seen in Section 5.VIII.B that in nonmultiplying > •m- nunc> 1 M I ,for a bounded variance is that the norm of the integral kernelthat describes the second moment also be less than unity. This i \ din n , h, , dm e . 1 i •i, i(6.11) through (6.15). These equations are of the Fredholm typt ,ml IM - r'i- •iNow ifpfor all three kernels, then M 2(P), M 2(P), <strong>and</strong> MJs 1S 2} (P) are all bounded <strong>and</strong> so is the variancein Equation (6.10). As for the unperturbed score moment M 2(P), the integral kernel inEquations (6.13) <strong>and</strong> (6.14) is L (C)(P,P") = L(P,P") i.e., it is identical with the transportkernel governing the analog game, <strong>and</strong> the feasibility condition In Equation (6.5) automaticallyensures the boundedness of the unperturbed second moment as well. The perturbedsecond moment satisfies Equation (6.11) with the integral kernel in Equation (6.12). Makinguse of Equations (6.3) <strong>and</strong> (6.4), this kernel is rewritten asL (2)(P,P") dP'T 2 (P,P')C 2 (P',P")/[T(P,P')C(P',P")] (6.16)<strong>and</strong> a sufficient condition of the finiteness of M 2(P) isp(6.17)Finally, the integral kernel of the correlated term in Equation (6.15) is t
312 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> CalculationsThenL (1)=jdP'€,(P,P',P")<strong>and</strong> clearly€,(P,P',P") = R,(P,P',P")^(P,P',P')}" 2Hence, according to Holder's inequalitydP"L m(P,P") ^rfdP"L (0)(P,P'')fdP''L (2)(P,P'')It follows from Equations (6.5) <strong>and</strong> (6.17) that the RHS of the inequality is less than unity<strong>and</strong> therefore the same is true with the supremum of the integrals, i.e.,sup dP"L (1)(P,P") < 1p'which calls forth the boundedness of the correlation term M{s,s 2}. Thus, we have provedthe following theorem.Theorem 6.1 — The variance of a correlated game which estimates the difference ofreaction rates in different systems if bounded inequality (6.17) holds for the integral kernelin Equation (6.16).In order to make condition (6.17) more specific, let us use the explicit forms of thekernels.* From Equations (5.32) <strong>and</strong> (5.33)T(P,P')dP' = a(P')exp[-T(P,P')]dD<strong>and</strong>C(P',F) dP' = c s(P') C 5(P',F) dE'where D - |r'-rj, P = (r,w,E), P' = (r',w,E) » (r + Dw,
313<strong>and</strong>C S(P',P")/C S(P',P") = y(P',P")Then from Equation (6.12)wheref fl - a(P')] 2 c 2 (P')L l21(P,P") = dD\ r ~ 7 IiP,P") 3F < s* i Uthat we are interested in the change of some reaction rate due to uV < i )1 'hof the material by a factor 1 — a (perturbed system). The scattering Kernels are identical
314 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationsin the two systems, i.e., y = 1, c\ = c„, <strong>and</strong> f m= 00. Accordingly, conditons (6.19) <strong>and</strong>(6.20) becomea < 1/2<strong>and</strong>sup c(P) < (1 - 2a)/(l - a) 2PIt is easy to see that if in a monenergetic transport problem these conditons are violated,then the variance of the score difference is indeed unbounded. 8 - 6 7 , 8 3 8 4If in some region the survival probability c s(P) is altered so that the total cross sectionremains unchanged, then 7 = 1 <strong>and</strong> a = 0. If the maximum optical extension of the regionis T 1n, then f mT 1n<strong>and</strong> condition (6.20) givessup[6 2 (P)/c s(P)j(l e V < 1pFor an infinite homogeneous medium in momoenergetic approximation, this condition reducestoCs < Vc swhich again is not only sufficient, but also necessary for a finite variance. 8In contrast to the example above, it may also happen that condition (6.19) or (6.20)fails to hold for a problem which seems feasible. In such cases, either the conditions aretoo restrictive for the specific problem or the game is not defined properly. In practice, onehas to examine the effects of the approximations applied in the derivation of the conditions<strong>and</strong> one also has to consider the possibiltiy of using a perturbed analog game (where thegame is played analog in the perturbed system) instead of an unperturbed analog game, itwill be seen in Section D that in certain cases this change in the simulation does indeedreduce the variance.C. CORRELATED DIFFERENCE ESTIMATORSIn the derivation of the moment Equations (6.1) <strong>and</strong> (6.9), we assumed that both theunperturbed <strong>and</strong> perturbed scores result from the same contribution function f(P,P'). Thus,if f(P,P') is a partially unbiased estimator of the unperturbed reaction rate, the change inthe reaction rate due to the perturbation is estimated via the contribution functionAf(P 1P') = (W - l)f(P,P') (6.21)where W is the weight of the nonanalog particle after the flight from P to P'. If P' = P',,the point where the particle enters its i-th collision, then W = W'(i), as given in Equation(6.8). The partially unbiased estimator of the unperturbed reaction rate, f(P,P'), may be anyof those introduced in Chapter 5. VI. The most commonly used are the collision <strong>and</strong> track -length estimators.It is, however, not necessary that the perturbed <strong>and</strong> unperturbed scores be estimated bythe same estimator. It can be easily seen 48that the derivations in Sections A <strong>and</strong> B remainvalid if the score vectorWf(P,P') =(Wf(P 5P'),f(P,P'))
315introduced in Equation (6.1) for a general correlated game is replaced byf(P,P',W) = (Wf 1(P 5P 1 JJ 7(P,?'))ue)7where f, <strong>and</strong> f 2are two arbitrary partially unbiased estimators. For the estimation of thescore difference, it means that the estimator in Equation (6.21) is replaced byAf(P,P') = Wf 1(P,?') -f,(P,P')Use of different estimators for the perturbed <strong>and</strong> unperturbed scores has not yet been investigated;nevertheless, it is reasonable to assume that in specific problems it may yield alower variance than a common estimator of the two scores. On the other h<strong>and</strong>, if thecontribution function depends on the material composition of the system (which is the casewith the most common estimators), then it is inevitable that one would use different estimatorsin two games which differ only in the material-dependent quantities.1). VARIANCE OF THE CORRELATED SCORE DIFFERENCETwo important aspects of the correlated variance are investigated in this section. First,it is shown that the correlated game has the advantage of reducing the variance, comparedto the corresponding uncorrected estimation. This is seen by proving that the relative variantof an uncorrelated estimate tends to inifinity as the perturbations vanish, while that of thecorrelated game generally remains finite. Second, it is to be decided which system (theperturbed or the unperturbed) has to be chosen as the domain of simulation. Finally, thepossiblity of playing the correlated game in an "intermediate" reference system is brieflydiscussed.In the previous Sections, we assumed that the game is an unperturbed analog, i.e., thatit is played analog in the perturbed system. This, however, is only a matter of convention<strong>and</strong> the same score difference can also be estimated in a perturbed analog game. Usually,one prefers using the scheme with the lower variance. In the second part of this section,sufficient conditions are derived under which the unperturbed analog game results in lowervariance than the perturbed analog game.We assume that both the analog <strong>and</strong> nonanalog particles start their r<strong>and</strong>om walk withunit weights <strong>and</strong> also that the contribution function f(P,P') assumes nonnegative values. Thederivations are based on the second form of the moment equation as given in Equation (6 7).The weights W'(i) are given in Equation (6.8) by putting W = I . Let us denoteL N(P„,p;....,P 1 1 + 1) n T(P 1i,,p;)C(p:,p.) t(p„,p; + 1) (6.22)<strong>and</strong>L 11(P 11,?;,...,p; +1) n T(P 1,,Pi)C(Pj 1P 1) T(P 1X + 1) (6.23)Then the second form of the moment equation in the unperturbed analog gameF(s) = (s, — S 2) 2 is writtenwithM{(s, - S 2) 2 KP 1 1) = 2 MP, ... UPl 1 1L n(P 0^;,...,Pi + 1)v=0 J J Jn -i 1 -,, r 11(6.24)2 (W(i) - l)f(i) - - 2 (W'(() - l)f(i)
316 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationswhere, for the sake of brevity, we putf(i) = T-(P 4. ,,P 1)The term in braces is rewritten asA n, ,(P 0,P;,...,P;, t,) = [W'(n + i) - llf(n + 1)j 2 2 iW'(i) - l]f(i) + [W'(n + i) - l]f(n + 1)| (6.25)Finally, it follows from Equations (6.3), (6.4), (6.22), <strong>and</strong> (6.23) thatL„(Po,P; P 1111) = W'(n + 1) L n(P 1,,?;,...,?;,,,) (6.26)In order to compare the variances of the independent <strong>and</strong> correlated games, let usintroduce the relative variance as the ratio of the variance <strong>and</strong> the square of the expectationof the score:d 2 (P) = D 2 Js 1- S 2XP)ZM 2 Is 1- S 2](P)In the case of independent simulations MJs 1— S 2}(P) tends to zero if the perturbationvanishes, while the limit of the variance isD 2 Js 1- s 2}(P) = M 2(P) + M 2(P) - M 2 (P) - M 2 (P) — 2[M 2(P) - M 2 (P)]which is usually different from zero. Hence, the relative variance of the score differenceas estimated in independent games tends to infinity if the perturbation is vanishing. On theother h<strong>and</strong>, in a correlated gamed 2 (P) = M{(s, - s 2) 2 }(P)/M 2 {( SL- S 2)} - 1<strong>and</strong> from Equations (6.9) <strong>and</strong> (6.22) through (6.24)d 2 (P) = i jdp; JdP 1... JdP n + 1l„(p 0,p;,...,Pi +1)A n+,(P 05P;,...,P n+,)/{it JdPI JdP 1... JdP n + 1L n(P (),P;,...,P;+ 1)iW'(n + 1) - l]f(n + I)J" - 1Obviously, the kernels T <strong>and</strong> C are characterized by certain material <strong>and</strong> geometrical quantities(such as cross sections <strong>and</strong> geometrical distances) <strong>and</strong>, thus, so is the kernel L ninEquation (6.22). The perturbations in the system appear in the kernels through alteration ofsome of these quantities. If a k(k = 1, 2, . . . , K) represent these quantities in theunperturbed system <strong>and</strong> S 1are the same quantities in the perturbed system, then we canwriteL n(P 01P;,...,P n+1) -l„(p„,p;,...,P n+1|{aj)
317<strong>and</strong>L„(P 0,P;,...,Pi + 1) = L n(p H,p;,... ,p: +l|{a k})Leta k(a) = a k+ a(a k— a k) = a k+ aA kThen a k= a k(0) <strong>and</strong> a k= a k(1). Obviously, the perturbation vanishes as a tends to zero.Thus, the limit of the relative variance in the correlated game while the perturbation vanishesreadslirndw = i fdp; [dp,... fdp; +l UP 0,P;,...,P;, M) ^ K + ^ r , , . . . , ^ , )i^ f , f f , W'(n + 1 ) - 12 UP; dp,... dp; 1 + 1L„(P„,P;,...,P; 1 + 1) hm— 1 1 — f ( n + D,„(, JJ J U_ + 0CT2- iwhere both the numerator <strong>and</strong> the denominator have been divided by a} before taking thelimit. Let us denoteThen, according to Equation (6.26)W'(n) 1W 0)(n) - hm --—•oc-»0 CTW, , ^ N,. L„(P 0,P;,...,P n+1KSj) - L n(p 0,p;,...,p; + 1|(aj)W, n(n + 1) = hm ; —[7—;(1>aL n(P 0,P;„..,Pi +1RaJ)<strong>and</strong> from Equation (6.25)= S vflog eL n(P 0,P;,...,Pi +1KaJ)k=i
318 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationsf(P,P'). It does not mean, however, that the score difference in a correlated game has alower variance than in any other two independent unbiased games. To see this, it is sufficientto note that in the idealized case when both the unperturbed <strong>and</strong> perturbed scores are estimatedin zero-variance schemes, the variance of the score difference is also zero, which cannot beoutperformed by any correlated game.Let us now turn our attention to the proper choice of the domain of simulation. Thesecond moment of the score in the unperturbed analog game is described by Equations (6.22)through (6.25). By analogy to Equation (6.24), the second moment of the score differencein the perturbed analog game (when the perturbed reaction rate is the one which is estimatedin an analog game) readsM*{(s, - S 2) 2 KPJ =with1 fdp; (dp,... fdP: + 1L n(p 0,p;,...,p; + 1)A: + I(p 0,p;,...,p; 1 + 1) (6.27)n=0 J J JA* + 1(P 0,P;,...,P; 1 + 1) = [1 - W*(n + l)]f(n + 1)(22 [1 W*(i)]f(i)f i= 14- [1 - W*(n + l)]f(n + 1)]J(6.28)Equation (6.28) differs from Equation (6.25) in that 1 - W* appears in the former in placeof W'(i) — 1 in the latter. This is so because in the perturbed analog game, the particlemigrating in the perturbed system has a permanent weight of unity <strong>and</strong> the particle simulatedin the unperturbed system carries a statistical weight that is changed from collision tocollision. According to the weight generation rules in Equations (5.142) through (5.146)w*(i) = [T(P 1_,,Plyixp,_,,p;)][C(p;,p,)/c(p;,p,)]w*O -- i)<strong>and</strong> comparision with Equation (6.8) shows thatW*(i) = lAV'(i) (6.29)Introducing Equations (6.29) <strong>and</strong> (6.26) into Equations (6.24) through (6.28), we note, aftersubtraction, that the variance difference in the perturbed analog <strong>and</strong> unperturbed analoggames readsM*{(s, S 2) 2 I(PJ M{(s, - S 2) 2 J(PJ =2 fdp; fdp,... IdP n + 1L n(p 0,p;,...,p n+l)B n+1(p 0,p;,...,P n+1)n = 0 J J J
319whereB„(P„,P; P:, ,) = A*(P„P;,...,P:„ J A P J K , . . . ? ' ,)= [I - W'(n))f(n){(l - W'(n)pf(ri)/W'(o)"c 1+ 2 X U " W'(i)l 2 f(i)/W'(i)} (6.30)i -1Now, if B nis positive for every n. then the variance of the unperturbed analog game islower than that of the perturbed analog game. On the other h<strong>and</strong>, B n> 0 if0 < W'(n) < 1 for n = 1, 2, ... (6.31)<strong>and</strong> in view of Equations (6.3) <strong>and</strong> (6.4), we have the following theorem.Theorem 6.2 — The variance of the unperturbed analog game is not greater than thaiof the perturbed analog game if 0 < w(P,P') =¾ 1, i.e.,0 < f(P.P') « T(P 1P') (6.32)<strong>and</strong>0 < w(P,P')w S(P',P") =¾ 1, i.e.,0 < f(P,P')C(P',P") ss T(P,P')C(P',P") (6.33)for every point of the domain of simulation.It is to be stressed here, too, that condition (6.31) is sufficient but not necessary for apositive variance difference. Moreover, conditions (6.32) <strong>and</strong> (6,33) arc again sufficient butnot necessary for the fulfilment of inequality (6.31). Nevertheless, there are some importantpoints that follow from the theorem. First, if conditions (6.32) <strong>and</strong> (6.33) hold, then thecorrelated game results infinite variance, provided the analog game is feasible. Indeed, ifthe weight factors w <strong>and</strong> w sare less than unity <strong>and</strong> the analog game is feasible in the senseof Equation (6.5), then the integral kernels in Equations (6.!I) <strong>and</strong> (6.14) satisfy theinequalitiesL ( 2 )(P,P") < L ( 0 )(P,P") - L(P,P") < 1<strong>and</strong> therefore the condition of Theorem 6.1 is satisfied. Second, if the weight of the nonanalogparticle, W'(i), is less than unity, then the score difference estimator in. Equation (6.21) isnegative <strong>and</strong> so is the final estimate. Accordingly, the score in the unperturbed system islarger than that in the perturbed system. Thus, the considerations above suggest that thecorrelated game is to he played analog in that system where the higher score is expected.In certain problems, neither the unperturbed nor the perturbed system is acceptable asthe domain of simulation. This is the case, for example, with geometrical perturbationswhen the two systems are overlapping but both have regions not common with the other(Obviously, in such a problem the statistical weight of the nonanalog particle may becomeinfinite, whichever game is played.) In such cases, the easiest solution is to define assextended domain of simulation in which both the unperturbed <strong>and</strong> the perturbed particlesare processed nonanalog.
320 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> CalculationsIn general, one might expect that playing the game in a system which is neither unperturbednor perturbed, but, rather, "somewhere in between", the variance of the estimatemay be smaller in any of the unperturbed or perturbed analog games. The practical advantageof such an "intermediate" reference system depends on programing considerations as wellas on the possibility of defining a reasonable reference system.Mathematical description <strong>and</strong> a priori investigation of a correlated game in a referencesystem is analogous to that followed in this Chapter. Thus, it is easily seen that the twoforms of the moment equation in Equations (6.1) <strong>and</strong> (6.7) remain valid if T <strong>and</strong> C denotethe kernels in the reference system: the only alteration is that the weights of the correlatedparticles are to be chosen different from those in Equations (6.2) <strong>and</strong> (6.8).Namely, JfT 1(P 1P') <strong>and</strong> C 1(P' •P") denote the kernels in the perturbed system <strong>and</strong> T 2(P,P')<strong>and</strong> C 2(P',P') are those in the unperturbed system, the weight vectors in Equation (6.1) readw = (w;,w 2),VV - (W',',Wf)withw: W kT k(P,P')/T(P,P')<strong>and</strong>WfW kC k(P',P")/C(P',P")for k =1 or 2, by analogy to Equations (6.3) <strong>and</strong> (6.4). Similarly, the weight factorcorresponding to Equation (6.8) in the second form of the moment equation readsW'(i) =(W|(i),W 2(i))withwj(i) w r k(p,_. ,,PJyT(P 1^p;) x c k(p;,p,)/c(p;,p.)for k = 1, 2, i.e., for the particles representing the perturbed <strong>and</strong> unperturbed systems,respectively.Specifically, the second moment of the score difference when the game is played in thereference system has a form analogous to that in Equations (6.24) <strong>and</strong> (6.25):Mi(S 1S 2) 2 KPj - 2 UP; UP 1... dP' h IL 0(p o,p;,...,p: + 1)A n + 1(p o,p;„,.,p; 1 4 1)withA n + 1(P 0 5P;,...,p;, M) - [w;(n + i) - w> + lyjftn + i)J2XW 1(I)W 2(i)]f(i) - [WJ(n 4- 1) + W 2(n 4- l)]f(n + 1)Optimization of the reference system may be rather troublesome in general. In fact, it is noteven certain that the optimum reference system is "between" the two systems in any sense.
E. EXAMPLES AND SPECIAL TECHNIQUESLet us first consider an application of Theorem 6.2. Assume that the perturbationintroduced into the system consists of an alteration of the cross sections in a finite regionV. LetCT(P) = [1 - a(P)]ff(P)wherea(P) == 0 if P i V<strong>and</strong> may be different from zero inside V. Then condition (6.32) is met if0 < [1 - a(P')]exp[T„(P,P')'| =¾ IwithT„(P,P') = j 1 '(X(P 1)O-(P 1) dt; P 1= (r + tw,«,E)Similarly, condition (6.33) holds ifO < [1 - a(P')]explT U(P,P')]c S(P')/c S(P') « 1where c s(P') is the survival probability at a point P' inside the perturbed region. V <strong>and</strong>. isequal to c(P') if P' is outside V. For a constant value of a, these inequalities becomeO < (1 - Ot)C"' =£ min[l, inf c S(P')/c S(P')] (6.34)p'where T sis the maximum optical extension of the perturbed region.If the perturbed system differs from the unperturbed system only in the values of thesurvival probability, then condition (6.34) becomesO < C 5(P)C 5(P)i.e., the game with the higher scattering probability is to be played analog.Next, we consider a delicate example of the correlated simulation. Let the perturbedsystem be constructed from the unperturbed one by complete voiding of a region (geometricalperturbation), i.e., let a region of the unperturbed system be replaced by a vacuum. ThenT(P 1P') =£ T(P.P')since T = O in the void. Then Theorem 6.2 seems to suggest that the game should be playedanalog in the unperturbed system. In this case, however, the weight of the nonanalog particlewould become infinite whenever a collision is played in the region voided in the perturbedsystem, <strong>and</strong> one might think that this example contradicts the theorem. This, however, isnot the case since conditions (6.32) <strong>and</strong> (6.33) also state that the theorem applies only tononvanishing nonanalog kernels, which is clearly violated in the example.Because of the possibility of infinite weights, the game obviously may not be unperturbedanalog <strong>and</strong> therefore finite variance can only be obtained in a perturbed analog simulation
322 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationsunless other tricks are introduced. An alternative solution proposed by Rief <strong>and</strong> Fioretti" 7involves the introduction of delta scattering into an unperturbed analog game. Yet the problemis not completely solved by either method. Let us realize that the estimated effect of theperturbation will he biased to some extent, since the scattering (<strong>and</strong> possibly multiplicative)properties of the material, removed from the unperturbed system, will have no effect on thefinal result (no scattering is played there).An exact treatment of such problems cannot be performed by completely correlatedhistories. A possible solution is that the particles' histories are separated if a collision occursin the perturbed region, the perturbed particle suffers a delta scattering, or does not suffera collision at all, whereas the unperturbed particle enters the collision <strong>and</strong> then follows anindependent path. This makes the simulation unbiased, but weakens the correlation betweenthe two histories (which, in turn, tends to increase the variance of the estimated perturbation).A procedure of this type was proposed by Takahashi 81for the calculation of reactivityperturbations in pulsed fast reactors. A satisfactory solution of the problem is expected fromfurther investigations. 28The danger of a biased correlated estimate also is real in cases where the perturbedregion is not completely voided, but its optical dimensions are very small, <strong>and</strong> thus theprobability of a collision inside the region is low. In this case, only a minute fraction of thehistories will carry information on the difference of the scattering properties of the perturbed<strong>and</strong> unperturbed regions <strong>and</strong> therefore a bias, universally associated with the estimation ofrare but important events, is expected. This difficulty may be remedied by the method offorced collisions. 19 In this method, the history of the correlated particles is split into twobranches when it enters the perturbed region for the first time. The probabilities of acollisionless free flight through the region are calculated for both the perturbed <strong>and</strong> unperturbedparticles, <strong>and</strong> the first branch of the common history is restarted from behind theperturbed region; the weights of the restarted particles are multiplied by the respective freeflightprobabilities. In other words, the fractions of the particles that are expected to crossthe perturbed region without collision are deterministically transmitted through the region.The particles in the second branch will carry weights equal to the difference of the originalweights <strong>and</strong> those of the transmitted particles, <strong>and</strong> they are forced to enter a collision insidethe perturbed region. This is performed by selecting a free flight from a truncated transitionkernel concentrated on the perturbed region, as is done in the ELP method (cf. Section5.VIII.D). Let us note in passing that care must be taken in properly altering the weight ofthe perturbed particles when they are restarted from the boundary of the perturbed regionsince their weights were altered after the previous collision according to a free flight interruptedat the boundary, (cf. Sections 5.IV.A <strong>and</strong> B).In this method, particles migrating in the second branch of the history will carry informationon the scattering properties of the perturbed region. Therefore, these particles are tobe kept in existence until they contribute to the final score. They should not, for example,be split or Russian rouletted any more. 19It may be questionable whether scattering shouldbe forced at the first crossing only or perhaps also at repeated entries to the perturbed region.Nevertheless, it seems logical to limit the forced collision to the first entry as repeated forcedcollisions are likely to deteriorate the efficiency of the method, for two reasons. First, everyrepetition increases the number of histories <strong>and</strong> thus the number of collisions to be playedper starter. Second, the weight of a particle that has been forced to collide several timestends to be very low, for the method is used for optically transparent regions when theprobability of a free flight through the region is close to one.As mentioned in the previous section, in certain applications, a reference system is usedwhere the game is played analog in order to make the estimation feasible in both the perturbed<strong>and</strong> unperturbed systems. A special technique used in conjunction with correlated games inreference systems is discussed briefly below.
323The weight factors associated with a transition from a point P to P' in the referencesystem of a transition kernel T(P,P') were seen to have the formw k-T k(P,P')/T(P.P')for k = 1 (perturbed system) <strong>and</strong> k = 2 (unperturbed system). Making use of the explicitform of the transition kernelsw k- K(P')/cx(P')]expj - j dt[or k(P t) - Cr(P 1)]] k = 1, 2Iwhere P 1is a point situated at a distance t from P on the Spatial line connecting P <strong>and</strong> PObviously, whenever cr > cr kfor any of the systems (k = 1 or 2), the weight factor for thesystem may become very large for large free flights. Large fluctuations in the statisticalweights, on the other h<strong>and</strong>, may lead to a large variance.A possible resolution of the problem proposed by Rief 7 " was the introduction of delu.scattering in all three systems. Let the delta-scattering cross sections (cf. Section 5,VJL u„<strong>and</strong> cr„k(k = 1, 2) have the following properties:CT 0(P) S= 0, o- 0
324 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> CalculationsF. PERTURBATION SOURCE METHODAn approach different from the correlated <strong>Monte</strong> <strong>Carlo</strong> procedure was proposed byMatthes for estimating the effects of small perturbations on reaction rates. 50 ' 51The procedureis based on the assumption that the quantities of second order in the perturbations can beneglected. The method proposed assumes a coupled direct-adjoint game where the directgame provides a perturbation-independent response function (weighting function) for theadjoint game. This original method can be converted to a purely branching direct game.Let us consider again the variation of a reaction rate R due to some perturbation in thesystem:8R = jdP[4/(P) • 4/(P)Jf(P) = JdPSiKP)f(P) (6.35)According to Equations (5.4) <strong>and</strong> (5.5). the unperturbed collision density satisfies the transportequationvji(P0 - jdP'Q(P')T(P',P) + j dP>(P")K(P",P) (6.36)Let the differences of the perturbed <strong>and</strong> unperturbed kernels <strong>and</strong> sources be denoted as5T(P',P) = T(P',P) -8K(P",P) = K(P",P) -T(P',P)KtP'.P)<strong>and</strong>SQ(P) = Q(P) - Q(P)Then the perturbation in the collision density reads
325It is seen from Equation (6.37) that 8i|/(P) satisfies a transport equation analogous to Equation(6.36) with a first collision density 8«|/„(P) defined in Equation (6.39). Rewriting Equation(5.10) in terms of the collision density perturbation, we have a relation between the direct<strong>and</strong> adjoint collision densities as(6,40)This relation suggests the following procedure. In the first step, let us simulate the unperturbedcollision density in a direct game with the unperturbed kernels <strong>and</strong> determine thequantity 8\|* A(P). In practice, integrals of8«|»„(P) over small phase-space regions are estimated,which implies the assumption that 8i)/ (,(P) is approximately constant over the separate regions.If the perturbations are small, this approximation causes a negligible error. The first twoterms in Equation (6.39) can often be determined analytically. If analytical integration isnot possible, they can be estimated as first-flight collision densities. To see this, let us writethe first two terms in the formObviously, this expression defines the first-flight collision density at P due to a starter atP' selected from the source density Q(P') when the starter has an initial weightW : - 8Q(P')QiP')+8T(P',P)T(P',P)This contribution to Sifi,, (or better, to its integral over the small phase-space regions) canbe estimated parallel to the simulation of the first flights in the unperturbed direct game.The integral of the third term in Equation (6.39) over a small region is an ordinary reactionrate in the unperturbed game with a weighting function equal to the integral of the kernel8K(P",P) over the region. Such integrals can be estimated in the course of the direct simulation.In the second step, an adjoint game is played again in the unperturbed system whichsimulates I|J*(P) (cf. Section 4.VII) <strong>and</strong> the adjoint reaction rate of the RHS of Equation(6.40) is estimated. The weighting function in the adjoint reaction rate is 8i|s 0(P), calculated,in the first step.Although the considerations above are valid only in first-order perturbation approximation,this limitation can be easily removed. Indeed, if the direct game is played in theperturbed system, then the exact value of the perturbation in the collision density, 8ifi t, inEquation (6.38), can be estimated <strong>and</strong> used as the weighting function of the reaction ratein the adjoint game.The same result is obtained in the alternative method, where the direct game is playedin the unperturbed system <strong>and</strong> the adjoint game in the perturbed. 34 - 35These methods havethe common drawback that if the perturbed system is considerably more complicated thanthe unperturbed (i.e., if small but complex structures are inserted into a simple geometry),the simulation of the perturbed game may require considerably more effort than that of theunperturbed game.The techniques treated in this Section were introduced mainly for estimation of reactivityperturbations. This concern will be revisited in Section 6.111.An alternative method that does not require the introduction of an adjoint game is based
326 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationson the fact that the perturbation of the collision density satisfies the transport equation (6.37),<strong>and</strong> this equation contains the unperturbed kernels. Therefore, starting particles from thefirst-flight collision density in Equation (6.39), the reaction rate (6.35) can be estimated inan unperturbed direct game. To show this, let us write 8(JJ 0(P) in Equation (6.39) in thefollowing form:SiK 1(P) =dP'Q(P')T(P',P)8Q(P')+8T(P',P)Q(P')T(P',P)dP' I dP"v|i(P")C(P",P')T(P',P)SC(P",P')+ST(P',P)C(P",P')T(P',P) _(6.41)Equations (6.41) <strong>and</strong> (6.37) show that the unperturbed game provides the source of anothergame which in turn, simulates the perturbation. The scheme is analogous to a coupledmultiparticle simulation (cf. Section 5.IX.D) <strong>and</strong> can be played in the following way:1 • Let an unperturbed particle be started from the unperturbed source density Q(P 0) <strong>and</strong>let its next collision be selected from the unperturbed transition kernel T(P„,PJ).2. Let the selected collision point PJ also be the first collision point of a "perturbationparticle" i.e., a particle that simulates the collision density perturbation §4» in Equation(6.37). The weight of the perturbation particle at the collision point PJ due to thestarter at P 0will beW,=SQ(P N)+8T(P Q,PJ)Q(P 0) T(P 01PJ)3. Let us follow the simulation of the history of the perturbation particle according tothe unperturbed kernels <strong>and</strong> accumulate the contributions to the reaction rate in Equation(6.35) (including the contribution due to the first flight from P 0to PJ),4. At the end of the history of the perturbation particle, let us continue the history of theunperturbed particle by playing a collision (from PJ to some P 1) <strong>and</strong>. if it survives thecollision, by selecting a new flight from P 1to P 2.5. Again, let us consider P 1as the source point of a new perturbation particle <strong>and</strong> letP 2be its first collision point. The weight of the new particle at P 2will bew, _ SC(PJ^1)+8T(P 11P 2)C(PJ 5P 1) T(P 11P 2)Return to step 3.Naturally, if the starting weight of the "simulation particle" is zero, i.e., if the collision<strong>and</strong> transition of the unperturbed particle take place through a phase-space point where noperturbation is introduced, then the history of the perturbation particle is not to be simulated.This method of perturbation estimation in most cases is less effective than the correlatedgame presented in the previous section. However, in problems where the perturbed regionscover only a small fraction of the whole domain of simulation, the game above may outperformthe correlated game. Coupling the two methods proved very efficient. 64In thecoupled game, a correlated technique is applied for the first few collisions of every starter<strong>and</strong> separate histories of perturbation particles are started from subsequent collisions. Thevariance of the perturbation source method in general is investiaged by Noack. 62
327G. PARAMETRIC PERTURBATIONS: INTEGRAL MONTE CAELOThe methods of perturbation calculations presented in the previous secti>only if the perturbed system does not differ essentially from the unperturbof drastic differences, the statistical weights in the correlated game tend tcresulting in a large variance of the final estimate. The first-order perturbalioiis limited a priori to small perturbations, <strong>and</strong> the exact perturbation sourchave the limitations discussed in the previous Section.A special method was proposed by Usikov 82for estimating the ch<strong>and</strong>ue to finite perturbations. The method is based on the assumption that tbe characterized by the change of certain system parameters. Let us here tcase, when some change in a system parameter a represents the pertufor example the number density of an element in the material composition < i "characteristic geometrical distance, or any other quantity playing a rolesimulation.) Let the parameter value a, represent the unperturbed systcvalue of the parameter in the perturbed system. Let R(Ci 1) <strong>and</strong> R(a 2)rates of interest in the unperturbed <strong>and</strong> perturbed systems, respectively. 'Iof the reaction rate is8R = R(a 2) R(CT 1)If R(a) is a differentiable function of the parameter, the perturbation is written as(6.42)The estimation of SR is performed in a two-step <strong>Monte</strong> <strong>Carlo</strong> procedureconsists of a simple selection of the parameter a between a, <strong>and</strong> a 2. In tthe derivative dR/da is estimated in r<strong>and</strong>om walks. Let p(a) be a probabilitydefined over the interval [a 1 (a 2] <strong>and</strong> let us rewrite Equation (6.42) in the 1(6.43)Selecting an a value from p(a) <strong>and</strong> then estimating dR/da in a simulation procedure wherethe initial statistical weight of every starter Is multiplied by l./p(a), obviously we obtain aoestimate of 8R. Estimation procedures for the parametric derivatives of reaction rates aredetailed in the next Chapter.Note that the probability density p(a) in Equation (6.43) is arbitrary <strong>and</strong> its proper choicemay reduce the variance of the estimate. Let us realize that optimization 'with respect tep(a) here is analogous to the problem of source density optimization discussed in Section5.VIII.J. If M 2(CT) denotes the second moment of the score in the r<strong>and</strong>om-walk estimate ofdR/da with unit weight starters <strong>and</strong> with ct given, then the optimum probability density p(a)follows from Theorem 5.26 asIf the form of M 2(a) can somehow be guessed, then p(a) can be chosen close to the optimum.Otherwise, the easiest way is to select a from a uniform density. It can be seen 82that inthe latter case, the variance of the estimate is minimum if every r<strong>and</strong>om walk is started witha newly selected a value.
328 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> CalculationsThe integral <strong>Monte</strong> <strong>Carlo</strong> method can be easily extended to problems where the changein the reaction rate is due to simultaneous changes of several system parameters. In thiscase, however, it is necessary to estimate the derivatives of the reaction rate with respectto all the parameters involved, which requires either several independent differential <strong>Monte</strong><strong>Carlo</strong> estimations or a correlated differential eame.II. DIFFERENTIAL MONTE CARLO: SENSITIVITY ANALYSISAnalysis of the effect of uncertainties in some characteristic parameters on given reactionrates, or determination of the sensitivity of reaction rates to small changes in the systemparameters, play an important role in nuclear design <strong>and</strong> operation. In complex systems,the only way of performing such an analysis is through <strong>Monte</strong> <strong>Carlo</strong> simulation. Correlated<strong>Monte</strong> <strong>Carlo</strong> presented in the previous Chapter is a possible tool for examining such effects.An alternative method is the estimation of the sensitivity of the reaction rates on some systemparameters that characterize the uncertainties (perturbations). To be more specific, let usconsider a reaction rate R depending on the parameter a. Assume that we are interested inthe variation of the reaction rate when the parameter varies around a given a value. If Rcan be exp<strong>and</strong>ed into a Taylor series around this value, the variation due to a change of Aain a is expressed asd"RR(a + Aa) - R(a) =- 5R(a) = ^ TT (Aa)" (6.44)where d" R/da" is the n-th derivative of R(a) at a. If the change Aa in the parameter a issufficiently small <strong>and</strong> R(a) is a suitably smooth function of a, then the first few terms onthe RHS of Equation (6.44) approximate well the change in the reaction rate.(6.45)Parametric derivatives of the reaction rate are estimated in differential <strong>Monte</strong> <strong>Carlo</strong> games.Use of the Taylor series form of the change in the reaction rate has the advantage over thecorrelated <strong>Monte</strong> <strong>Carlo</strong> technique of providing this change for arbitrary (but small) variationsof the system parameter(s), while correlated games determine the perturbation due to a givenvariation of the parameter(s) (cf. Section G). In other words, the derivatives are characteristicof the sensitivity of the reaction rate in question to the variation of the parameters. In fact,sensitivity is defined as the ratio of the fractional changes in the reaction rate <strong>and</strong> in theparameter when the parameter perturbation tends to zero, 44i.e.,Equations (6.44) <strong>and</strong> (6.45) concern the case when the reaction rate changes due to thevariation of a single system parameter. In the case of several parameters, the correspondingmultivariate Taylor series applies <strong>and</strong> the partial derivatives of R with respect to the parametersin question have to be estimated. For the sake of simplicity, we shall constrain ourderivation to the single-parameter case; extension of the considerations to several parametersis straightforward.An unbiased procedure of estimating the first derivative was first proposed by Mikhailov 57<strong>and</strong> independently by Miller' 9 <strong>and</strong> Takahashi. 81 The schemes were proposed for the calculationof reactivity changes in nuclear reactors due to small variations in system parameters.
129Hall 31 gave a constructive derivation of a multiparameter s*= • r , , j dc >« >'i c , . jprocedure. The relative merits of the correlated <strong>and</strong> diffeuur. , >«r < PRUU" 1culations are compared for special problems by Rief, 66_6!iatthat estimates parametric derivatives is given by Matthes."An unbiased game estimating the first parametric derivative is derived in Section i basis of measured reaction rates <strong>and</strong> calculated sensitivities. The considerateto estimation of higher-order derivatives in Section D. A simple analyrica' -i • •in Section E illustrates the procedure. Finally, the derivations are extended t< \> >> ' ,contribution functions which also depend on the system parameters. In die disthe game that estimates the parameter-dependent reaction rate at a given i> u»will be called the unperturbed game; the system at the given parameter vale 3 * 1 « r>turbed system. The differential game estimates the derivative of the uiiperate with respect to the parameter at its given value.A. ESTIMATION OF FIRST-ORDER DERIVATIVESLet us first consider a correlated unperturbed analog game <strong>and</strong> recall the second formof the generalized moment Equation (6.7) that gives the moment of a correlated score functionF(s) = F(S 1 5S 2):M{F(s)}(P„, 1) = (Fwhere pointed brackets st<strong>and</strong> forE W'(i)f(i) E w(i)f(i)(FJ...]) = E {dP! JdP 1... (dP„ JdP nJdPO 1 1(6.46)n T(Tv 15POC(POP 1)i=l<strong>and</strong> for the sake of brevity, we putT(P 11JO +1)FJ.,.]f(i) = f(P,_. S,P0the contribution function assigned to a flight from P 1..., to PJ. It is tacitly assumed in Equation(6.46) thatEWe shall first assume that this contribution function is common to both [correlated) partkiesConsider a correlated game in which the unperturbed system corresponds to a parametervalue a <strong>and</strong> the analog particle scores S 2in this system. Let the perturbed system becharacterized by the parameter value a 4 Aa <strong>and</strong> let the nonanalog particle give the scores,. This means that the transition <strong>and</strong> collision kernels in the two systems differ due to the
330 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationsdifference of some parameter value characteristic to the systems, <strong>and</strong> the unperturbed kernelsT <strong>and</strong> C are taken at the parameter value a. Denoting this dependence in the formT(P,P') =T(P,P'|a)<strong>and</strong>C(P',P") =C(P',P"|a)the perturbed kernels readT(P,P') = T(P,P'|a + Aa)<strong>and</strong>C(P,P')= C(P,P'ja + Aa)Assuming a common contribution function of the form f(P,P'), we also postulate that thecontributions do not depend on the parameter a. This is the case, for example, with thetrack-length estimator if flux integrals are estimated, but is certainly not the case with theexpectation estimator. The considerations below will be extended to parameter-dependentcontributions in Section F.Let us consider score functions of the formF(s) = CiAas,i.e.,SW(Of(OW'(i)Aaf(i) (6.47)Obviously, by taking the limit of Aa —» 0, the argument of the score function tends to thederivative of the score, the quantity of interest in the differential game. We shall assumewithout further investigation that the order of taking the limit Aa •—» 0 <strong>and</strong> the expectationcan be interchanged, i.e., thatlim G(s) = G(Hm s)<strong>and</strong>IG( limAor—>0S 2lim M (6.48)We do not discuss this assumption, but, rather, note that for games that are feasible <strong>and</strong>have a bounded variance, this assumption comes true at least for linear <strong>and</strong> quadratic functionof s in place of G(s). Note that the expectation in Equation (6.46) is taken with the unperturbed
331kernels, which remain unchanged while Aa lends to zero. Thus, taking the limit in Equations(6.46) <strong>and</strong> (6.47), we haveMl G ) = (G 2 — W'(i)f(i)daG2 T- W'(i)f(i),... [ da(6.49)it is apparent that a flight from P 1 - 1to PJ contributes to the differential score by thequantitydaW'(i)f(i)<strong>and</strong> the statistical weight that multiplies the contribution function f(i) in the i-th flight isw;„(i) = —W(Oi^=O (6.50)versus W'(i) in an ordinary nonanalog game. Comparison of Equations (6.46) <strong>and</strong> (6.49)shows the very important consequence that, apart from the difference between the statisticalweights, the differential games <strong>and</strong> the ordinary nonanalog games are identically played.(Note immediately, that the situation is somewhat different if the estimator f also dependson the parameter a, as will be seen in Section F.) Taking note of the expression of W'(i)in Equation (6.8), the statistical weight in the differential game in Equation (6.50) has theexplicit formW' (i) = W da/I T(Pj_„p;|a + AaVT(P 3_ ,,PjIa).3=1XC(Pj',Pj|a4-AaVC(PJ,Pj|a)]l1f ' d ' dW 2 — log.T(TV„Pj'|a) + 2 T" IQEeC(P^PjIa)(j=,i aaj = i aa(6.51)after the i-th flight, where W is the initial (starting) weight of the particle.Now if M 1(P) <strong>and</strong> M 1(P) denote the expected scores due to a unit weight starter fromP in the unperturbed <strong>and</strong> perturbed systems, respectively, <strong>and</strong> if we putG(s) = sthen, from Equation (6.49), the expected score becomesM{da} (P) =limMAa-»0S 2(P) = Hm — [M 1(P) - M 1(P)]Aa J AA-» GAada M 1(P)
332 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> CalculationsOn the other h<strong>and</strong>, if the source density of the particles does not depend on a, then theparametric derivative of the reaction rate at h<strong>and</strong> readsdR d f f d-7- = -7- dP Q(P)M ,(P) = UPQ(P)-M 1(P)da da J J dadPQ(P)MJ£j(P)We have thus proven the following theorem.Theorem 6.3 — An unbiased estimate of the parametric derivative of a reaction rate isobtained from an ordinary analog game, with contributions from free flights only, if thestatistical weights of the particles are chosen according to Equation (6.51).B. DISCISSION OF THE GAMELet us now investigate more closely the weight generation rules in Equations (6.50) <strong>and</strong>(6.51). Let, as before, W'(i) <strong>and</strong> W"(i) denote the weights of a particle before <strong>and</strong> after itsi-th collision in an ordinary nonanalog game, respectively, <strong>and</strong> let W[ 0(i) <strong>and</strong> W' (1)(i) bethe corresponding weights in a differential game. If the nonanalog game simulates the effectof a finite parametric perturbation <strong>and</strong> the differential game gives the corresponding derivative,then W'(i) <strong>and</strong> WJ n(I) are related according to Equation (6.50), <strong>and</strong> W 0)(i) is to beexpressed by W"(i). According to the weight generation rules in Theorem 5.8, the ordinarynonanalog weights are related asWO) = Wa)-W 8(POP 1) (6.51)<strong>and</strong>W'(i + D = W"(i) •W(P^P 1 + 1) (6.52)whereW 5(POP 1) = C(POP 1Ia-FAa)ZC(POPJa) (6.53)<strong>and</strong>W(P 1 5POM) = T(P,,P;+ l|a + Aa)/T(P,,PO + 1|a) (6.54)Therefore, from Equation (6.50)W0(i + 1) = W''0)L = o + £ k>g CT(P„P0j«)This means that the weight of the particle after its i-th collision in the differential game isWO 1(I) = ~w"(i)L=o
333<strong>and</strong> from Equation (6.51)w';,,(i) = w; n(i) +-f io gcc(p;, pja)daHence, we conclude that while the ordinary nonanalog weight generation rules [Equaiion?(6.51) through (6.54)] are multiplicative, the corresponding rules in a differential game areadditive:W"(i) = W;„(i) + WlO(POP 1) (.6.55.<strong>and</strong>WO)O + 1) = WO 1(O + W-W 15PO 10 (6.36)where< l) (P;,Pi) = T- log eC(P0P.|a) (6.57)da<strong>and</strong>w
334 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> CalculationsthenSeveral other special cases are reported, for example, in References 67 to 69.As a consequence of the additive weight generation rules, it may happen that thestatistical weight of a particle becomes negative, a phenomenon preferably avoided inordinary nonanalog games.Another consequence of the additive weight generation rules is that in an analog differentialgame (which is played according to the analog kernels), particles temporarily havingzero statistical weight must not be eliminated from the simulation (as is done in an ordinarygame). Such particles may obtain nonzero weights in a later stage of the simulation. In otherwords, statistical weights in an analog differential game determine the actual contributionsof the particles to the score, but are not measures of the "size" of the particles, which isthe case in an ordinary nonanalog game.A further pecularity of the differential games is that in a nonanalog differential game,multiplicative <strong>and</strong> additive weights are present in parallel. They are to be generated independently,according to the respective generation rules. The score is to be multiplied by theproduct of the two weight factors, but all the weight-dependent biasing schemes like splitting<strong>and</strong> Russian roulette are to be applied according to the multiplicative weight value. (Notethat the additive weight is sometimes considered simply as part of the contribution function.In our formalism, this weight is a direct descendant of the multiplicative weight of anordinary nonanalog game, while the definition of the contribution function is unchanged.Therefore, we think it more logical to call it a weight rather than a contribution function.)In what follows, we discuss briefly the nature of the moment equation. Since the specificform of the weight generation rules has not been exploited in the derivation of the momentequation in Chapter 5.II, the relations in Equations (5.56) <strong>and</strong> (5.58) apply here too. Thus,the r-th moment of the differential score satisfies the equationwhere W ( nis the weight of the particle at P, WJ 0<strong>and</strong> W" nare related to W ( 1 )according toEquations (6.55) through (6.58), <strong>and</strong> we have omitted a from the arguments of the kernels.In spite of the formal equivalence of the ordinary nonanalog <strong>and</strong> differential moment equations,they are essentially different. This difference is due to the fact that the former, aftermaking use of the (multiplicative) weight generation rules, does not contain informationabout the previous history of the particle, while the latter will always "remember", due tothe additive weight factors. This property can be best visualized through the first-momentequation. From Equation (6.59) with r = 1(D(6.60)
335According to Equations (6,55) through (6.58)WJ n_{ +w"'(P,P')W 1~ ' W ( 1 )<strong>and</strong>w;,, W«"(P,P') + Wj))(P',?")W "(I) ~+W YY(1>still containing W (1), the. weight accumulated during the history precedingP. In contrast to that in an ordinary nonanalog game, the corresponding weigfrom Theorem 5.8 asW'—W= w(P,P')<strong>and</strong>= w(P,P')w s(P',P")independently of W.It is interesting to note that an alternative form of the differential first-moment equationcan be derived from the analog unperturbed moment equation. Let us write the ordinaryfirst-moment equation (5.57) into the following formM{s}(P) = J dP'T(P,P')f(P,P') +|dP'T(P,P')JdP"C(P',P")M{s}(P")Since, ( ds 1 ddifferentiation of the first-moment equation above yieldsM j^-J(P) = J dP'T(P,P')w (,) (P,P')f(P,P')+ JdP'T(P,P')JdP"C(P',P")[w (l, (P,P') + w^CP'.P'OJMisKP")+ |dP'T(P,P') JdP"C(P',P")M|-^|(P") (6.6 i)This equation is clearly different from Equation (6.60) <strong>and</strong> is similar in form to the momentequations investigated in Chapter 5, i.e., it is indeed of the Fredholm type. This, however,is reached at the expense that the source term of the equation contains the expected scorein the ordinary game. On the other h<strong>and</strong>, Equation (6.61) suggests an alternative methodof estimating parametric derivatives. This method is analogous to the perturbation sourcemethod discussed in Section 6.LE <strong>and</strong> will not be repeated here.
336 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> CalculationsReturning to the realization of a differential game, we have seen that Equation (6.59)is not appropriate for the investigation of feasibility. On the other h<strong>and</strong>, since the simulationgoes according to the unperturbed kernels, the differential game is feasible if the correspondinganalog game in the unperturbed system is also feasible, provided the analog kernelsare such that the differential weight factors in Equations (6.57) <strong>and</strong> (6.58) are bounded.This is also seen from Equation (6.61), which shows that the integral kernel of the Fredholmtypeequation is just the analog transport kernel.Investigation of the conditions of a finite variance is a little more complicated since thesecond moment of the differential score does not follow from that of the analog game bysimple differentiation. This is evident from the relationA M {s ^ 2 M { s | } ^ M { ( £ )2}The variance of the differential score was investigated by Zolotukhin <strong>and</strong> Usikov, 86give conditions under which the variance of the differential score is bounded.whoC DATA ADJUSTMENT WITH SENSITIVITIESMeasured reaction rates (called integral experiments) are usually known to be more orless inaccurate due to uncertainties in the material characteristics playing a role in theweighting function of the reaction rates. Differential <strong>Monte</strong> <strong>Carlo</strong> can be applied to theadjustment of the material characteristics (parameters). A method of parameter adjustmentproposed by Hall 32is based on comparison of the results of integral experiments <strong>and</strong> <strong>Monte</strong><strong>Carlo</strong> estimates of the reaction rates in question that are dependent on the material parametersto be adjusted. Let « = (ct,,a 2, . . . ,« k) Tbe the (column) vector of the parameters whichare to be adjusted, <strong>and</strong> on which the integral measurements <strong>and</strong> the <strong>Monte</strong> <strong>Carlo</strong> estimatesdepend. (One may think, for example, of a set of cross sections at given energy values.)As the material parameters are usually determined experimentally, they are more or lessbiased by statistical <strong>and</strong> experimental errors. Assume that the covariance matrix of theparameters, denoted by A, is also given. Letm = (m,, m 2,m„) Tdenote a set of integral measurements <strong>and</strong> letr = r(a) = (r,, r 2,r n) rbe the <strong>Monte</strong> <strong>Carlo</strong> estimates of the measured quantities at the actual values of the parameters.Finally, let R be the estimated covariance matrix of the <strong>Monte</strong> <strong>Carlo</strong> estimates r. The purposeof the procedure is to find an adjusted parameter set a instead of a which "best fits" themeasured <strong>and</strong> calculated values. The adjustment is based on the assumption that both thecalculated reaction rates <strong>and</strong> the parameters follow multivariate normal distributions withexpectations <strong>and</strong> covariances m, R <strong>and</strong> a, A, respectively, the the maximum likelihoodestimates of the parameters give the best-fitting set. This means that the optimum estimatea of the parameter vector minimizes the log likelihood functionlogL = [r(a) •- sn] T R '(a)[r(a) - m] + (a - ot)' A '(a - a) (6.62)
337Minimization is performed by setting the derivatives of logL with respect to the parametersa equal to zero. The resulting equations readd T (a)R ""'(a)|r(a) m] + A -"(a - «) « h(a.) = 0 {6 63;provided the derivatives of R 1 can be neglected. Herecl(a) = {cfr,(a)/da (}is the sensitivity matrix of the reaction rates. Equation (6.6.3) is nonlinear in the parameter,<strong>and</strong> therefore its solution is not straightforward. Hail proposes a Newton-Raphson iterativesolution of the forma,,., , = a„ - H ' Ha 1Jh(S n) (6,64)whereH(a) = {((11,(3)/¾,}<strong>and</strong>, neglecting again the derivatives of R" 1 <strong>and</strong> d, differentiation of Equation (6.63)yields11(a) = a T (a)R-'(a)cKa) + A (6.65)The iteration consists of the following steps:1. Let n = 0 <strong>and</strong> a, = a.2. Calculate the <strong>Monte</strong> <strong>Carlo</strong> estimates r(a„), K(a„i, <strong>and</strong> U (a.,).3. Determine the value of logL from Equation (6.62) <strong>and</strong> H(a„) from Equation. (6.6.5).4. Let n = n -i- 1 <strong>and</strong> determine a n +, from Equation (6.64).5. If the value of logL or the parameter set a,., is converged, the a = a.,; otherwise, returnto step 2.It can be seen that the covariance matrix of the adjusted parameters a is approximatelyexpressed as 32 A ~ H-'(a)The adjustment procedure clearly requires a great amount of <strong>Monte</strong> <strong>Carlo</strong> calculations. OHone h<strong>and</strong>, the reaction rates <strong>and</strong> their covariance <strong>and</strong> sensitivity matrices are to be determined.These quantities can be estimated parallel in a correlated game (ordinary weight generationrules for the first two quantities <strong>and</strong> differential rule for the third). Qn the other h<strong>and</strong>, becauseof the iterative solution of Equation (6.63), the estimation proceduic must be repeated severs!times using successive values of the adjusted parameters.Note, however, that by neglecting the derivatives of the covariance matrix R <strong>and</strong> sensitivity matrix d , we have tacitly assumed at certain points that they are independent of the
338 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationsparameter values. Taking full advantage of this assumption, the Taylor series of the reactionrates around a has the formr(a) = i-(«) + d • (a - a)<strong>and</strong> (6.63) reduces to3 1 R ~ 1 Jr(Ot) - m + U • (a - r)] + A "' • (a - a) = O (6.66)After rearrangement, the difference of the measured <strong>and</strong> calculated rates readsm - r(a) = [Rfli' 1 ' 'A + dj(a - «)Taking into account the identity[RtT"'A •' = AS 1 jR + SAAS T 1the adjusted parameters are expressed asa tx •- Aa 1 JR + aa]-'[m - r(a)] (6.67)In this expression, the covariance <strong>and</strong> sensitivity matrices are taken at the original valuesa of the parameters. Similarly, the covariance matrix of the adjusted data follows fromEquation (6.65) asA = H~'(a) A Va[R I dAd ]" l dA (6.68)Equations (6.67) <strong>and</strong> (6.68) were derived by Dejonghe et al. 8 driectly from maximumlikelihood principles. This approach seems to have the advantage that no iteration is necessaryfor the adjustment, i.e., the reaction rates <strong>and</strong> related matrices have to be estimated onlyonce. Note, however, that the two approaches are not equivalent in spite of the fact thatboth are based on the approximation that at certain points the derivatives of R <strong>and</strong> d canbe neglected.In fact, Equations (6.63) <strong>and</strong> (6.64) are also valid if d depends on the parameters <strong>and</strong>its derivative is neglected solely in the expression of H in Equation (6.65). Thus, the IteratesH n+, are evaluated with updated values of d(a,). In contrast, Equation (6.66) assumes aconstant d . It can be easily seen that the adjusted parameter set given by Equation (6.67)is just the first iterate a,, as follows from Equations (6.63) through (6.65). Hence, weconclude that the second approach defines the first-order adjustment of the parameters, <strong>and</strong>further iterates by the first approach give adjustments depending on higher-order derivativesof the reaction rates with respect to the parameters.I). ESTIMATION OF HIGHER-ORDER DERIVATIVESHigher-order derivatives of the reaction rate in the expansion (6.45) can also be estimatedby <strong>Monte</strong> <strong>Carlo</strong>. The weight generation rules of higher-order differential games follow fromrepetition of the line of thought of the previous <strong>and</strong> present Chapters. Let us denoteS , , )_i!idaa
339<strong>and</strong> letdsdaLet us consider a correlated game estimating a function of s (i, <strong>and</strong> s (i)in which diparticles are associated with the systems of parameter values a <strong>and</strong> a 4 \
340 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculations<strong>and</strong> its derivative isAdaLLda 211(a) /11(a)da 11(a)/11(a)Therefore, the statistical weight in a second-order differential game, according to Equation(6.70), is; H(a) /11(a) W'da 2d(Aa) 2 l A a -°Successive use of the arguments above shows that the generalized moment equation of afunction of the r-th parametric derivative of the score has the formM G(£')} (P "' !) = {G % w < r ' (l)f(l) " G 2 w; r )o)f(i)where WJ r)(i) is the particle's weight after the i-thflightw; r)(i) = ~- w; r. 0(i) + Wi 0(I)WO.. ..G) = 7/7-7. wo)dad(Aa)'(6.71)Specifically, for the second derivative, the weight generation rule becomesWJ 2)(O = X -f~ 2IQg 0T(P,. ,,PJIa) + 2 TTl IQg 6C(POPJa) + [WO 0(I)] 2 (6.72)j„ i ua j = i ua<strong>and</strong> for the third derivativeWO/0) = 2 £:, 1Og 6T(P^ 1 5PJIa) + 2 1Og 6C(POPJa)j=, da 3+ 3WO 1(OWO,© + [WO)O)J 3It is stressed again that, apart from the differences in the weight generation rules, there isno difference between the estimation procedures of an ordinary reaction rate <strong>and</strong> its parametricderivatives. Therefore, in principle, the derivatives up to any order can be estimated alongwith the reaction rate itself in a single game.E, A SIMPLE EXAMPLEFor the sake of illustration, let us consider the estimation of the derivative of the collisionrate with respect to the total cross section in an infinite homogeneous medium of total crosssection IT <strong>and</strong> survival probability (mean number of secondaries per collision) c. Let thetransport in the medium be monoenergetic <strong>and</strong> isotropic. Then the kernels of the simulationareT(P,_ ,,PO ~aexp(-
341whereis the length of the flight between the points P,.., <strong>and</strong> PJ. It is easily seen that forany function F 1J . . . jdp; dp,... UP:. n T(V 1 7PJ)C(Pj.?,) T(p n,p;,, ,)F n[= d€, d€, ... d€„ +1c"CT" +1 exp -a 2 *i)F n[ (6.73)When estimating the derivative with respect to a, the weight of a particle in its i-th flightfollows from Equation (6.51) asWJ 11(I) = E - (l 0 g ca - of)),»i da(6 74)(Obviously, the weights assume both positive <strong>and</strong> negative values.) Consider the case whenthe collision estimator is applied, i.e., whenHTV 1T?;) - f(i) = 1The expectation of a function G of the derivative is deduced from Equations (6.49), (6.73),<strong>and</strong> (6.74):withG n== F df, F At 2... f dV + ;o- + 1 exp(-TT 2x {CFI WJ 1,©] G V WJ n(I)(6.75)I _i=l J Li=ILet us denotet, - o V( >j= i(6.76)Then the differentia] weight readsWJ n(I) = (i - t,)/cr(6.77)Let us apply here the generating function technique introduced in Section 5.IX.C, i.e., SetG(s) be the moment-generating functionG(s) = e x (6.78)
342 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> CalculationsThen the moment-generating equation becomesyds V] 1 d' d rK ( 0 K > {C'X-O CT n_() U AInserting Equations (6.76) through (6.78) into Equation (6.75), we obtainG 11= I dt, I dt, ... I dt n + Ief T- nil •-, r n\ exp X 2 (i -li) - exp X X (i - t,)A n + 1-A nwithexpn(n + 1)dt. [dt,... [ dt„exp 5 > ,Simple integration yields the expression of A nasA n=exp, n(n + 1)n (ix + i)Hence, the expected score readsdsdcrj a „_o . dX dX J„„oNowdA„n(n + 1)dX,?, ix + iA"'A" l x -° ~ 1<strong>and</strong> thusdXAccordingly, the first derivative of the collision rate with respect to the total cross sectionis zero. The result is trivial since the number of collisions in an infinite homogeneousmedium with constant cross section is independent of the value of the cross section. Thesecond moment of the score in the estimation of the first derivative follows from the secondderivaties of A nwith respect to X. Sinced 2 A ndX 2 2>2 n(n + l)(2n + 1)X = O i» 1Thusd 2 G„dX 2 (n + l)(n + 2)(2n + 3) - n(n + l)(2n + 1)] = (n + I) 2
<strong>and</strong> from Equation (6.79)I / ds \ 2 ) 1 •A , I i 4- cVdoy j ex 2 ' a 2 (1 - c)-'F. EXTENSION TO PARAMETER-DEPENDENT ESTIMATORSIn the derivations above, we assumed that the contribuis independent of the system parameters with respect to wentiated. The considerations can be easily extended to thedepend on a. If we again define the differential game as th> in. » > Imake use of the results of Section 6.I.C, it is seen that the dof the history iss, == Hm [W'(i)f(ijet + Aa) - f(ija)]/Aawhere f(ija) = f(P,_,, P||a) is the (parameter-dependent) contribution in theflight takes place between P 1_ , <strong>and</strong> P;)- Taking the limit, we haveS 1= W^f(IJa) 4-daf(i|ct)where W n )(i) Is the statistical weight of the particle after the ith flight, a(6.51). It is remarkable that only a part of the score is proportional to thpart Is independent of it. This also means that the final score in this diffisum of the scores in a ' 'pure differential game'' (a game where the covary with the parameter) <strong>and</strong> in an ordinary game with a contribution jsame interpretation also follows from the explicit form of the reaction iR =I dP 4
344 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationswe haveS 1= W) 0(I - Df(P 1.. ,,PJIa) + [T(P 1. ,,P 1 Ja)C(JV ,,P^)VT(P 1,,P||a)da ' "Thus, the expected partial score resulting from a flight from P,.., in the differential gameisUP 1.-,) = fdPIT(P 1...,;?;|a)s, = W' (',,(i - I)I 1(P 1...,) + --T 1(P 1.,) (6.80)J ' dawhereI 1(P 1,) = jdp;T(p,.,,p;|a)f(P,_.,,p;|a)is the expected partial score in the corresponding ordinary game. Equation (6.80) is interpretedas follows. The score due to a flight from P,_, in the differential game is the sum oftwo contributions. One is the contribution by any of the partially unbiased estimators of theordinary game multiplied by the differential weight at P 1_, (i.e., by the weight attained afterthe scattering to P. ,). The other is the contribution of an estimator that has an expectedpartial score equal to SI 1(P 1da). This estimator may be either the one given in the secondterm of S 1asdaor any other estimator that follows from it by the transformation theorems established forpartially unbiased estimators in Section 5.VI.A. The estimators applied so far in practicalrealizations of differential games all follow from Equation (6.79), with well-known ordinaryestimators in place of f(i|a). The theory of partially unbiased estimators, when applied todifferential contribution functions, still may result in new, efficient estimators specific todifferential games.Finally, differentiation of the first-moment equation gives an equation corresponding toEquation (6.61) in the case of a parameter-dependent estimator:MJ£j(P) - j dPT(P,P') w (l) (P,P')f(P,P ) + — f(P,P )dadP'T(P,P')JdP"C(P' ,P")[w (1) (P,P') + w
345Let us assume that we are interested in the expectation of some function of the scoredifference due to a perturbation of a. In formula, let the score function in the momentequations (6,7) <strong>and</strong> (6.46) have the formF(s) = G(S 1 s,)where G(s) is some given function, S 1is the score in the perturbed system (characby the parameter value a + Aa), <strong>and</strong> S 2is the score in the unperturbed systemparameter value a). The expectation of G(S 1— S 2) in an unperturbed analog correlatesfollows from Equations (6.46) <strong>and</strong> (6.7) asM{G(s, - S 2)I(P 0) = (G 2 (W'(i) - l)f(i) - G 2 (W'(i) - l)f(i)whereW(i) = W(i|a +Aa)is the statistical weight of the perturbed particle at the collision point at PJ, whileW(i|a) = 1for the weight of the unperturbed particle (cf. Chapter 6.1). The correlated game that definesthis moment equation can be substituted by an equivalent differential game in the followingway. Let us exp<strong>and</strong> W(i|a + Aa) into a Taylor series around Aa = 0 asW(ija + Aa) = 2d"W(i!a + Aa)d(Aa)"AA-O(Aa)"VlIn view of Equation (6.71), the v-th derivative of W(ija) is just the weight W ('„,(i) in theestimation of the v-th derivative of the score. ThereforeW'(i|a + Aa) - W(i|a) = 2 WJ 10(O (Aa)"<strong>and</strong> the moment equation readsM(G(S 1- S 2)J(P 0) = (G 2 ^ 2 W Ui)f(i)' GThe above two forms of the moment equation express the fact that the exps
346 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> '<strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationsdifferent Aa values. In a parametric study of reaction rate perturbation, a single differentialgame may be substituted for a large number of distinct correlated games.In a simple reaction rate perturbation, if R" denotes an estimate of the v~th derivativeof the reaction rate, then^ - (Aa)"SR = R(a + Aa) - R(a) « J\ R ( "» -is an estimate of the reaction rate perturbation, where N is the number of terms kept in theTaylor series expansion. Numerical experiments show that two terms in the expansion alreadygive satisfactory estimates in typical perturbation calculations. 67 '*Note that in order to give an a posteriori estimate of the variance of the result, it is alsonecessary to estimate the covariance matrix M{(d s7daJ(d!f/da^)} of the final scores in thedifferential game. If V denotes an estimate of the (v,u,) element of the covariance matrix,then the variance of the estimated reaction rate perturbation due to the parameter changeAa isIII. CRITICALITY CALCULATIONSOne of the most important quantities characterizing a nuclear reactor is the effectivemultiplication factor, k eff, a measure of how far the fissile system is from the critical state.If k eff= 1, the system is critical; if k eff< 1, it is subcritical; <strong>and</strong> if k eff> 1, the system isin a supercritical state. This factor is an eigenvalue-type quantity appearing in the transportequation in the form4.(P) = I dP'>(P") K 5(F 1P) + -- K,(P".P)jL k ef,(6.81)whereK S(P",P) =[dP'cJP")C 5(P'JP J T(PJP)<strong>and</strong>K 1(PJP) = |dP'c f(P") 2 nq n(P")C„(P",P')T(PJP)J11 = 1while c s<strong>and</strong> c fare the respective scattering <strong>and</strong> fission probabilities, <strong>and</strong> C 5<strong>and</strong> C 1are therespective probability densities of the neutron's coordinates after a scattering or fission. q nis the probability that n neutrons are produced in a fission <strong>and</strong> T is the transition kernel.All these quantities were defined in Chapter 5.Equation (6.81) is a homogeneous equation, i.e., it describes a system with a steadystateneutron flux (collision density) without an external source. If the system characterizedby the kernels in Equation (6.81) is critical, then the equation has a solution with k ctf= 1.In the opposite case, the system can be hypothetically altered to critical by changing thenumber of neutrons produced in a fission by an appropriate factor. This factor is just l/k cfr.
347Introduction of this factor also means that when talking about collision density, we mayaddress two different quantities, such as the collision density resulting from the <strong>Monte</strong> <strong>Carlo</strong>simulation with the physical kernels, <strong>and</strong> the hypothetical density defined by Equation (6.81).This duality will not be confusing in the derivations below; a distinction will be madebetween the two quantities when necessary.It can be shown that Equation (6.81) has an everywhere positive solution belonging toa positive eigenvalue, <strong>and</strong> this eigenvalue is the largest among the possible eigenvalues ofEquation (6.81). Calculations aimed at determining the largest eigenvalue, k eff, will be calledcriticality calculations.We ab<strong>and</strong>on here the reactor physical discussion of the transport equation (6.81); theinterested reader is referred to Reference 2.Most naturally, the necessity of using <strong>Monte</strong> <strong>Carlo</strong> methods in criticality problems arisesat least as frequently as in the case of reaction^rate calculations. Application of <strong>Monte</strong> <strong>Carlo</strong>methods to such problems dates back to the early 1960s. Comprehensive lists of early worksare given in References 9, 55, 60, <strong>and</strong> 65. <strong>Monte</strong> <strong>Carlo</strong> estimation of the multiplication,factor in Equation (6.81) differs from an ordinary reaction rate estimation mainly from twopoints of view. First, k a[sis an eigenvalue <strong>and</strong> not a reaction rate; second, the transportequation (6.81) has no first-collision term. Therefore, criticality calculations by <strong>Monte</strong> <strong>Carlo</strong>methods involve specific problems, which will be reviewed in this Chapter.A. PRINCIPLE OF THE SIMULATION: THE SOURCE ITERATIONThe method of <strong>Monte</strong> <strong>Carlo</strong> estimation of k effis based on the most common deterministicsolution procedure of the criticality transport equation, called the source iteration or themethod of successive generations. The idea behind the method is that the transport; equation(6.81) is set in a form analogous to the inhomogeneous transport Equation (5.4), except thatthe first collision term contains the unknown collision density <strong>and</strong> the multiplication factor.The resulting equation is then solved by iteration. A number of slightly different formulationsof the method are given below.1. First MethodLet us define the following functions¢(?) = VJi(P)AV (6.82)<strong>and</strong>Q(P') = JdP>(P") Cf(P") 2 nq n(P")C„(P",P')/k eff(6,83)where (Ji(P) is the collision density in Equation (6.81) <strong>and</strong> W is chosen such that/dPQ(P) - 1i.e., Q(P) can be considered a source density of unit total strength. We start our discussionwith this method because in all previous derivations, the (fixed) sources were assumed tobe normalized to unity. The quantity W, satisfying the normalization condition, readsW = dP"4i(P")c ({P>(P"yk ctT (6.84)
348 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculations<strong>and</strong>, accordingly, the artificial source density readsQ(P') - JdP>(P")C t
3492. Let i|/ n (P) denote the solution of Equation (6.86) with ¢,,'(?) in place of the firstcollision density3. Insert this solution into Equation (6.87) to define the first iterate of the source densityQ inEquation (6.92), <strong>and</strong> it consists of the neutrons that emerge from fissions induced by the nth generation. The source is normalized to unity via division by k„. This is in accordancewith the role of k effin making the system (hypothetically) critical, as discussed in connectionwith Equation (6.81).
350 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculations2. Second MethodThe procedure above can be reformulated in an alternative way.Let us assume thatthe physical system under investigation is either critical or subcritical. Then a steady-state(physical) collision density can only be reached if an external source is present in the system.Let Cp(P) denote the (physical) collision density produced in the system by an external sourceS(P). Then (J)(P) satisfies the equation(J)(P) = J dP"cf)(P")fK s(P",P) + K f(P",P)] + (J) 11(P) (6.95)with the first collision densitycJ) c(P) - JdP'S(P')T(P',P) (6.96)Let us now consider the iterative solution of the following equation system:(J)M(P)=JdP"(J) :, n> (P) = jdP"4> ln -"(P")K. f.(P",P) (6.98)withC(P)= (J) 0(P)given in Equation (6.96). In this procedure, (J)"'(P) is the collision density due to the externalsource S(P) if collisions leading to fission do not contribute to the collision density (firstgeneration). cf) (n) (P) is the collision density of neutrons created in fission that are provokedby the (n - l)st-generation neutrons. Let the n-th iterate of the multiplication factor bedefined ask n= JdPcJ) 0" M) (P)/JdP(J)f (P) = S 1TS 01...,,or, sinceS (n_„ - dP(J)W(P) = dF'(pW-'>(P") Cf(P")k„ readsdP(J)
3SJNow, if ( "> > 0, then k = i <strong>and</strong> dV"'' 1 satisfies Equation (6.the true physical collision density in a critical system. On the o>it can be seen that the sum•h.an* 'ii •i¥?) = S 4> ,n, (P)exists <strong>and</strong> satisfies Equation (6.95), i.e., it is the collision > >ir m •« i ,»with the external source S(P). It can also be proven that, in .r.i . u . .of kj is just k olf, the effective multiplication factor of the .the next Section) Finally, denoting1• • ,' '' •it follows from Equations (6.97) through (6.99) thatIJI 01 YP) =dP''IJ/ .1•Hevery iteration, while in the second method the collision densities 4>
352 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationsthe kernel, we have assumed that the energy <strong>and</strong> direction of the fission neutrons areindependent of the energy <strong>and</strong> direction of the neutron that gave rise to the fission. Thisassumption is justified in most practical cases. Let z(r,E,r G) be a function that satisfies theequationz(r,E,r„) = JdP"z(r',E',r„)K s(P",P) +- X(EJrJ T(r (,->rJE) (6.100)withP = (r,E),P" == (r',E')Obviously, z(r',E',r„) is the collision density at P' = (r',E') due to a neutron that emergedfrom a fission at r„. Furthermore, let us define the functionS(r) = j dEi|i(P)c f(P)v(P)/k eff(6.101)S(r) is the density of fission neutrons emerging from around the spatial point f [Moreprecisely, it is the fission density in the hypothetical system where the collision density isi|/(P).] Let us multiply Equation (6.100) by S(f„) <strong>and</strong> integrate with respect to r Then itis seen that the resulting equation is identical to Equation (6.81) if we putOJ(P) - |dr'z(r,E,r')S(r') (6.102)Finally, let us denoteZ(r.r') = J dECf(P)v(P)z(r,E,r') (6.103)It follows from the interpretation of z(r,E,r') that Z(r.r') is the density of fission neutronsemerging from around r due to a fission neutron started from r'. An equation containingonly the fission density S <strong>and</strong> the kernel Z is obtained if Equation (6.102) is multiplied byc fv <strong>and</strong> integrated with respect to E. Doing so <strong>and</strong> taking note of Equation (6.101), we haveSir) = dr'Z(r,r')S(r') (6.104)keff JThis equation has the form of a conventional eigenvalue problem. Its solution is sought byiteration:S w (r) = jdr'Z(r.r')S ( "-' ) (r') (6.105)The iteration is equivalent to the method of successive generations since S (n)(r) representsthe fission source density in the n-th generation of the neutrons <strong>and</strong> is related to the(n — l)-th-generation fission source through the kernel Z(r.r'). LetS(n>= drS(n)(r) (6.106)
353<strong>and</strong>k„ = S l "VS'" •" (6. if;/;Then k„ is equivalent to the n-th iterative of the multiplication factor in the second method,as defined in Equation (6.99). Assume again the convergence k„ -* k ;. rr<strong>and</strong>S (n, (r)/S" ; ' -•> S(r)Then it is easily seen that Sir) satisfies Equation (6.104). Tin i >a is mi uto the second method introduced above. The difference in thi . n 'atio> oi i i i ihowever, is important from a simulational point of view, ine nssion densi^ "wmtiianorof the third method emphasizes that neutrons are followed from (birth iiu i •i oi r iin) a fission, thus giving a well-defined population of a generation. TK t i ,lation.s are correlated through the spatial distribution of the fission nei *t< v ( idue to the special form of the fission kernel K t.)The simulational aspect is reflected even better by an alternativemethod. The equations above determine the connection between the rmm!neutrons in successive generations. Similar relations can be established fcof fission points or, in brief, the fission density. Let
354 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationsit is seen that in the case of convergence, the functionsatisfies Equation (6.109), with k eff= k„.Note that with any function f(P) such thatI dPcp! clP 9!'"(P)n) (P)f(P) ^ 0an iterative estimate such ask n•= R 10 IZR' O (6.112)withR (n) = dP
3SSLet k„ denote the normalization factor, i.e.,dP KP)^- 1 XP)According to the physical meaning of the kernel U(P,P") in Equation (6 108), the (norrncw<strong>and</strong> unnormed) densities in the two generations are related as9'"'(P) = jdP"U(P,P")(P)i.e., the normalized first iterate reads9, 1 XP) - 9S 1 XPVk 1Repeating the reasoning, we have for the n-th iterates9
356 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> CalculationsWe shall use the operator notationsKdi -I dP"u>(P")K s(P",P)<strong>and</strong>K fi|iJ dP"u>(P")K f(P",P)With these notations, Equation (6.81) readsUj = K SUJ + — K 1ill (6.117)This equation can be formally rewritten asAJJ = k efru>withA = [I K S]-'K FThe proof is based on two assumptions. First, it is supposed that the total cross section iseverywhere nonzero <strong>and</strong> bounded in the system. Although for systems containing a vacuumthis assumption fails, for convex bodies surrounded by a vacuum this discrepancy can beeliminated by the vacuum-equivalent black absorber defined in Section 5.LC The firstassumption is formulated as1. 0 < a = inf o-(P) < GOSecond, it is assumed that there exists a phase-space region I <strong>and</strong> an energy interval [0,E f]in which the number of secondaries per fission is nonzero, i.e,2. V(P)IcXP) > 0 if E < E f<strong>and</strong>dP'Cf(P,P') > 0 if PeF, mesl" > 0Then the proof is performed in two steps.1. It can be shown that under condition 1 through 3 A is a completely continuous positiveoperator <strong>and</strong>, consequently, has a positive eigenvector ij) <strong>and</strong> a simple positive eigenvaluek eff. Furthermore, k eifis the greatest (in absolute value) of all the eigenvaluesof the operator A
3572. It is then proved that with the arbitrary function „ which is not orthogonal to theeigenvector the limiting relationHA-Cf)Jiholds in any L pnorm. Now, choosing the L 1norm <strong>and</strong> talcing into account thatA-Cj) 0= V»>the n-th iterate of the first collision density in the second method [Equation (6.08)] we haveHC + "!1/HCSI = K -K , TUssachoff 85gives an alternative proof based on the recurrence in Equation (6,105). Theproof assumes that the integral operator in Equation (6.104) has an infinite spectrum ofeigenvalues with a complete orthogonal set of eigenfunctions. The n-th iterate of k, nis thenexpressed in terms of k (i) /k ,n . where k 0)is the i-th eigenvalue <strong>and</strong> k ( " < k'" ~ k e(f. Theexpression shows the convergence of the iterates to k eff<strong>and</strong> also gives an estimate of theerror in the iterates.What we have outlined in this section is the proof of the convergence of the sourceiteration method when the quantities in question (functions <strong>and</strong> integrals of them) can heexactly determined. In other words, the proof concerns deterministic (analytical or numerical)methods. In the <strong>Monte</strong> <strong>Carlo</strong> approach, however, none of the integrals involved are calculatedexactly; rather, r<strong>and</strong>om quantities with expectations equal to the integrals are used in theestimation of k n. Furthermore, the realizations of the collision, points in a generation arestrongly influenced by the collision points sampled in the preceding generation. These factsmake a <strong>Monte</strong> <strong>Carlo</strong> procedure essentially different from a deterministic source iteration.They have the unfavorable effect that, although the iteration converges, systematic error*appear in the estimates, as will be seen in the next sections.CPRACTICAL REALIZATIONSThe method of source iteration or successive generations serves as the basis ><strong>Carlo</strong> estimation of the effective multiplication factor. It is, however, obviou < ot ialternative formulations of Section A that the simulation <strong>and</strong> estimation proceduK c mrealized in several ways. In what follows, we review a number of various estimatioi s> SicThe simplest method of simulation would be to let the neutron population » tcording to the transport equation, i.e., to play analogously the physical proceplace in the reactor. Then the neutrons start from an arbitrary source distribution g rthe collision density of the first generation, <strong>and</strong> establish the source for the next trenrraby producing new neutrons from fissions. The muliplication factor is then calculateJ ratio of the number of fission neutrons in successive generations. Such a procedure w < ,simulate the second iterative method introduced in Section A. The drawback of si < h T approachis the same as that discussed in the previous section, i.e., if the effecnw r.i > >plication factor differs essentially from unity, there is a high probability that the g >u M ,gradually die out (if k eff< 1) or become overpopulated (if k cfr> 1) before h isufficiently well-iterated value of k„. One version of this method uses normal!densities in every iteration. This modified scheme corresponds to the first method >A. In this case, every generation may consist of an arbitrary number of starters Il t d *bution of which is determined by the fission source produced by the previous v < Ri
358 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculations[cf. Equation (6.92)]. Although this procedure is feasible, it has the disadvantage that,although the fission neutrons that leave fissions are generated in order to establish the fissionsource of the next generation, all of them will not necessarily be processed. Though thisproblem is not too serious <strong>and</strong> can be avoided by skillful programing, in practical realizations,use of fission sites as the initial characteristics of a generation is preferred to the fissionneutronscheme.Equation (6.109) in the third method connects the fission points of successive generations.Similarly, Equation (6.104) connects the spatial density of fission neutrons. Thesimulation procedure applied in practice conforms with these interpretations of the transportequation <strong>and</strong> with the iterative schemes following from them, as detailed in the fourthmethod. A strategy with a fixed number of fission points is described below. 17,46Let every generation be started from exactly N fission points. Then the estimationprocedure consists of the following steps:1. Let the initial fission points (to be chosen by guesswork) be P\"\ Pf\ . . . ,1 5 ¾''. Letn = 1.2. From the points P
<strong>and</strong> start new histories until N new fission points ;wasted in simulating the histories which would yielu HS.IJestimate of the (n + l)-th iterate, k „ o f the mulbpht i*ibasic procedure, the ratio of the number of fission pom^ 'k n+1, according to Equation (6.118), <strong>and</strong> the numbei 'In the modified procedure, the number of new, (nhowever, the number of n-th-generation fission point n >be estimated. Let L (n>be the number of histories pi JM •>N-th fission point is produced. On averagel;torque.NODIN 2Vj(Pj"':histories start from a single n-th-generation fission (sourc. ) u unumber of histories necessary to produce a new fission j."'" • ,estimate of the number of n-th-generation fission point;€ ln) /v, <strong>and</strong> an estimate of the iterate of the multiplication Lc k n + 1- N/[N€
360 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationswhere 0 < m < n <strong>and</strong> m - 1 is the number of iterations to be discarded from the estimationdue to the influence of the arbitrarily chosen initial source distribution.Frank- Kamenietzky 21proposes a modification of the simulation procedure in whichexactly one neutron emerges from every fission. This is reached by suitable alteration ofthe reaction probabilities. In the basic procedure, a neutron entering a collision at a pointP is absorbed there with a probability c a(P) <strong>and</strong> results in the emission of v(P) fission neutronswith a probability C 1(P). Scattering is played with the complementary probability c s(P) = 1- c a(P) - C 1(P). Leta = maxv(P)c,(P)/[ 1 -pc s(P)]<strong>and</strong> let us denotec* = v(Ptc r(P)/a<strong>and</strong>c!(P) = 1 -c s(P) - c*(P)These probabilities define a game in which the scattering probability is the same as in thebasic procedure, but the fission <strong>and</strong> absorption probabilities are altered. Let v*(P) denotethe mean number of secondaries per fission in the altered game <strong>and</strong> let us definev*(P) = 1<strong>and</strong>Z*(r,r') =jdEz(r.E,r')v*(P)c*(P)Then, according to Equation (6.103), Z* is related to the unaltered kernel Z asZ*(r,r') = Z(r,r')/aInserting the altered kernel into the fission-neutron density equation (6.104), we haveS(r) = -~Jdr'Z*(r,r')S(r')withktff r ~ KEFI'ai.e., in the altered game (in which exactly one neutron is produced by every fission), thefission density of the original game is reproduced, while the effective multiplication factor(eigenvalue) becomes 1/a times the original one. The iteration procedure based on the alteredgame is also suitable for the estimation of k cff, <strong>and</strong> it has the advantage that the number ofhistories per generation is always N, the number of fission points.Several other modifications of the basic procedure exist. The interested reader is referredto the works by Lieberoth, 46 Frank-Kamenietzky,- 1 Cast <strong>and</strong> C<strong>and</strong>elore,- 5 <strong>and</strong> Zolotukhin<strong>and</strong> Maiorov,
361The application of source iteration in <strong>Monte</strong> <strong>Carlo</strong> eigenvalue estimations raises a numberof specific problems which are not present in a fixed-source, reaction-rate estincedure. First, the recursive process assumes an arbitrarily chosen initial distribution >' ipoints. In principle, it may happen that due to an unfortuante choice of the initial d?the procedure does not yield the required final result. However, as was pointed outB, unless this distribution is orthogonal to the desired solution, the procedure doeto the proper distribution. Starting from an everywhere positive distribution, ortis certainly avoided. Moreover, if, for example, the initial distribution is region wi, i > J<strong>and</strong> proportional to the density of the fissionable material in the regions, the ittributions in most practical cases will not be influenced by the actual distributinitial fission points after five to six iterations. 17[This also means that, in such cases, onecan put m = 5 in Equation (6.119),]Nevertheless, in unfortunate cases, the effect of the initial distribution ma large number of iterations. Theoretically, the rate at which this effect dies onby the ratio of the second-largest eigenvalue to the largest one (dominance raratio is near unity, a persisting initial distribution is expected 85(cf, Section B).A more serious theoretical problem follows from the fact that k effis esiim:ratio of two r<strong>and</strong>om variables instead of the ratio of their expectations. To seeclosely, consider the equation defining the third method of source iteration. AcEquation (6.112), the effective multiplication factor can be expressed asKn= JdPj dP" f(P)U(P,P>XF)/ I dPf(P)cp f(P)where
362 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationsit is obvious from the fact that the normalization factor in Equation (6.114) is again a reactionrate (expectation) which is replaced in the simulation by an estimate. In practice, when afixed number of fission points is used, the bias is due to the fact that only the first Nrealizations of the fission points in a generation are retained; the rest of the realizations arediscarded. As a result of this arbitrariness, the iterated fission points will not necessarily bedistributed according to the density, cp,"' in Equation (6.114). Consequently, the reactionrates, which represent the iterates of the multiplication factor <strong>and</strong> are estimated accordingto Equation (6.118), will be different from k„ in Equations (6.116) <strong>and</strong> (6.120).Hence, we conclude that even if the iterated fission densities in the third method,
363we haveD 2 [k] = < 2 (k, - k,) )/(n - m + I) 2J = ni1fit - k,) 2 ) + 2]t [ (6.123)(n — m D 2 Lj = M I
364 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationswe have a conservative estimate of the varianceD 2 [kJ =£ V 2 [l + 2p,/(l - d)]/(n - m + 1)Yet two problems remain to be solved when we estimate the variance according to thisexpression. First, the dominance ratio, d, is not easy to estimate. Second, numerical experimentsshow 25that in certain cases this approximation is overconservative, i.e., it resultsin spuriously high estimates of the variance. Gast <strong>and</strong> C<strong>and</strong>elore 25propose an alternativeformula with empirically fitted constants:D 2 [k] = V 2 [l + 10p 2 /(l - p,)]/(n - m + 1) (6.125)Equation (6.125) can be directly estimated in the iteration procedure as follows. An estimateof the generationwise variance V 2is obtained asnV V (k, - k) 2 /(n - m + 1)j"«'<strong>and</strong> the correlation coefficient p, is estimated asn- 1Pi = S (kj - k)(k J + 1~ k)/[V 2 (n - m - 2)]j = mTest calculations show 25that for small systems the correction term [second term in bracketsin Equation (6.125)] is negligible <strong>and</strong> only becomes essential if the multiplying materialextends over larger regions.E. A ONE-STEP SCHEME: ACCELERATION OF THE ITERATIONIt was shown in Sections 5.V.C <strong>and</strong> 5.VIII.F that importance sampling may, in principle,result in estimation schemes of fixed-source reaction rates with zero variance. The sametechnique can also be implemented in the source iteration procedure to obtain an exactestimate of the effective multiplication factor. Most naturally, zero-variance schemes ineigenvalue estimations are no more realizable in practice than those in fixed-source problems.Nevertheless, approximations to these schemes may substantially reduce the variance of theestimated eigenvalue.Importance sampling resulting in zero-variance criticality calculations was first proposedby Goad <strong>and</strong> Johnston. 29They combined the method with a technique similar to the ELPmethod (cf. Section 5. VIII. D), as a result of which the starters are not allowed to escapefrom the system. An alternative scheme proposed by Kalos 38is given below. It is based onthe method of importance sampling without statistical weights.Consider the fission-neutron density formalism of the third method in Section A. Thespatial distribution of the fission neutrons, S(f), is governed by Equation (6.104)S(r) = ----- dr'Z(r,r')S(r') (6.126)k efr Jwhere Z(r,r') is the density of the fission neutrons emerging from around f due to a fissionneutron started from r'. In the course of the source iteration, the n-th-generation fission
365neutron density, S 0 for every r such thatdrZ.ir.rd > 0i.e., V is definitely positive at every point that can serve as a starting point of fission neutronscontributing to the generation of next-generation fission neutrons. LetSrXr) = S(r)V(r)<strong>and</strong>Zir.r'l = V(r)Z(r,r')/V(r') (6.129)Then Equation (6.126) can be rewritten asSr(r) = jdr'Z(r,r')£f(r') (6.130)Equation (6.130) is analogous to Equation (6.126) <strong>and</strong> defines an iterative procedure similarto that in Equation (6.127):cf (n) (r) = jdr'Z(r,r')y ( n -"(r') (6.131)By analogy to Equation (6.128), an estimate of k eiTfrom the n-th <strong>and</strong> (n — l)-th generationsreadsk„ = Jdr^ryJdrcT^ ')(r') (6.132)Now, if the importance function V(f) is the solution of the equationV(r) = — jdr'V(r')Z(r',r) (6.133)
366 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculations[i.e., V(r) is adjoint to S(r)j, then it follows from Equations (6.130) <strong>and</strong> (6.131) that thefollowing integral relation holdsdr,T"'(r) = dr dr'V(r)Z(r,r')^'"- n (r')/V(r')dr'|drV(r)Z(r,r')CfXn -l>( r')/V(r')= k effJdr'a !| "-'>(r')Accordingly, the n-th iterate of the multiplication factor in Equation (6.132) isK = Ktt (6-134)i.e., the exact value of the effective multiplication factor is reproduced in every iteration.This scheme would have zero variance if the reaction ratesdr',? (k) (r'), (k = n - 1, n)were estimated without statistical fluctuations. Although this can also be attained (at leastin principle), the main consequence of the scheme is that knowledge of the adjoint functionV(f) makes a one-step (iteration-free) estimation possible. Therefore, approximate valuesof V(r) may accelerate the source iteration. Before turning to a discussion of practicalapplications, let us realize that it is not necessary to perform the importance-sampled gameabove in order to obtain a one-step estimation procedure. Instead, appropriate weightingfunctions of the reaction rates defining k nmay be used in an analog game, as is stated inthe following theorem.Theorem 6.4 — Let an analog game be played according to Equation (6.127), i.e., letS
367if the same relation holds for the initial distributions. Therefore, Equation (6.1rewritten asR 1 " 1= jdr .?""(!•)i.e., comparison of Equations (6.135) <strong>and</strong> (6.134) shows thatk n= k c!1In practical realizations, the usual problem of zero-variance estiio. * < «namely, determination of the weighting function V(r) (the solution » LII.. < >no easier than the solution of the original transport equation, Neverr •'r • i *»« .
368 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationsin criticality calculations by correlated games may be equally efficient. Estimation of thechange in the multiplication factor,* however, is slightly more complicated than estimationof reaction rate changes since k,,, is estimated as the ratio of two reaction rates [cf. Equations(6.99), (6.107), (6.112). <strong>and</strong> (6.118)1. In this section, we review a number of proposedmethods for estimating the change in k t.„ due to some perturbations introduced into thesystem.Let us consider again the fission-neutron density formalism in Equation (6.104). LetS(r) <strong>and</strong> Z(r,r') be the fission-neutron density <strong>and</strong> kernel, respectively, in the unperturbedsystem, i.e., the eigenvalue equation in this system readsKnS(V)• Jdr'Z(r,r')S(r')Let S(r) <strong>and</strong> Z(r,r') denote the corresponding functions in the perturbed system. If k clfisthe effective multiplication factor in the perturbed system, thenk eftS(r) = J dr'Z(r,r')S(r')Accordingly, for the arbitrary function f(r), the multiplication factors are expressed asK 11= J dr Jdr'f(r)Z(r,r')S(r'V J drf(r)S(r)<strong>and</strong>k eff= jdrdr'f(r)Z(r,r')S(r')/j drf(r)S(r)At this moment, we do not specify the weighting function f(r). The simplest choice isf(r) =1. On the other h<strong>and</strong>, we have seen in the previous section that settingf(r) - V(r)the solution of Equation (6.133), makes possible (in principle) a one-step estimation of k eft.This choice may also find application in the estimation of the reactivity perturbations to beseen later in this section. Let us now introduce the shorth<strong>and</strong> notationsdrf(r)S(r) =(f,S)<strong>and</strong>|dr|dr'f(r)Z{r,r')S(r') = (f,ZS)* Although the considerations <strong>and</strong> formulas below concern the perturbation of the effective multiplication factor,the subject is often referred to as "reactivity perturbation calculations". The reactivity p is defined as p = 1~ l/k cn. <strong>and</strong> the perturbations are related as dp = 8k eff/k)„, i.e, the two perturbations are essentially identicalwhat justifies the shorter name of the subject.
369Then the multiplication factors in the two systems readk eff- (f..ZS)/(f,S) (6. :3^)<strong>and</strong>k, fr= (f,ZS)/(f.S) (6. 136.,The quantity to be estimated is the difference of the two factors8k = 8k clT-- k elfDenoting§S(r) -S(r) •- Sir)<strong>and</strong>8Z(r,r') = Z(r,r'j -Z(r,r')it follows from the expressions of the multiplication factors above that8k = |(f,ZS) - (f,ZS) - k tff(f,8S)l/(f,S)= l(f,8ZS) + (f,Z5S) - k eff(f,8S)]/(f,S)In the majority of practical methods, it is assumed that estimation of the pertstarted after having reached a reasonably well-converged fission-neutron densitymultiplication factor, k etf, in the unperturbed system.^- 61 - 6 ' This means that theperturbation estimation reduces to the estimation of reaction rates with fixed sourcan be performed according to the rules introduced in Chapter 5. The unique feasimulation is that a history also terminates if a fission occurs, <strong>and</strong> it is the fissioncontributes to the estimates.The simplest way of estimating the reaction rateR - (f,ZS) - |drJdi-'f(r)Z(r,r')S(r')consists of the following steps:1. A neutron is started from the source S(r) [with an appropriate weight W(r) depend n $ f-.on the noon of S(r) <strong>and</strong> the method of selecting from S(Dj. The energy <strong>and</strong> dire'.-;*;?=of the starter is selected from x(EJ r).2. The neutron history is generated according to the transition <strong>and</strong> collision kernels •;.'
370 Monie <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculations3. In the first two forms of termination, the neutron yields no contribution to the reactionrate. If a fission occurs at the phase-space point P" = (r'.E') then the contributionof the history isW(r)v(Pjf(r')where y(P") is the mean number of fission neutrons leaving a fission at P".A rigorous proof of the unbiasedness of the estimation procedure in steps 1 through 3 forestimating the reaction rate (f,ZS) is given in Appendix 6A.A number of the simulation <strong>and</strong> estimation techniques introduced in Chapter 5 can alsobe applied here to modify the above procedure. The most obvious possible alteration of step3 follows from the theory of partially unbiased estimators. Accordingly, the scoreW(r)v(P")f(r') per fissions can be replaced by the sum of the scores W(F)C 1(P 1MP 1)Rr 1) overall the collision points in the history, where c,(P () is the probability of a fission in a collisionat P 1. Let us now consider some of the possible ways of estimating the perturbation in theeffective multiplication factor.1. We shall first assume that the converged, unperturbed fission-neutron density <strong>and</strong>the corresponding (but unknown) perturbed density are normalized as(f,S) = (f,S) - 1 (6.138)Then the perturbation m k t:11in Equation (6.137) reduces took = (LSZS) + (f,ZSS) (6.139)The first term on the RHS is easily estimated in a correlated game since it is of the formof a reaction-rate perturbation8R = (L(Z-Z)S) = J drf(r)
371in the unperturbed system, the weights are changed so that they account for a migration inthe perturbed system. [In brief, the perturbed fission neutrons are the progenies of theperturbed particles in the correlated game that estimate the first term in Equation (6.139), jThe second term is then estimated in the next generation, where the particles are thoseproduced by the previous generation. Their initial weights are equal to the difference of theweights of the perturbed <strong>and</strong> unperturbed particles born together, <strong>and</strong> the game is played inthe perturbed system, i.e., according to the kernel Z(r,r')-Note that, making use of the approximation in Equation (6.140), the perturbation inEquation (6.139) can be rewritten asSk = (f,ZS) - (f.ZS) + (f,Z 2 S)/(f,ZS) - (f,ZS)= (f,Z 2 S)/(f,ZS) - (f,ZS) (6,141)One might object that it is unnecessary to bother with correlated games to estimate the twoterms in Equation (6.139) when the two terms in Equation (6.141) can be directly estimatedin two successive generations. However, the objection is groundless since Equation (6.141)is only an approximate reformulation of the expression 8k = k elT- k efr, where k ctTis replacedby (f,Z 2 S)/(f,ZS) <strong>and</strong>, thus, even if the approximation in Equation (6.140) is very good,8k in Equation (6.141) is estimated as the expectedly small difference of two essentiallyindependent estimates, both of the order of magnitude.1. In contrast, the two terms in Equation (6.139) are both of the same order of magnitudeas the final estimate 8k.Note that the assumption of normalized densities, as formulated in Equation (6.138), isnot essential. The third term in the expression (6.137) of the reactivity perturbation (whichvanishes in the case of normalized densities) can also be estimated in the second step of thesimulation procedure above. 612. An important feature of the above method is that It may only work for small perturbationssince assumption (6.140) certainly fails to work if the fission-neutron densities inthe two systems are very different. Polevoi 63proposes a scheme which is valid for arbitraryperturbations. The price one pays for a more exact treatment is that more than one generationmust be simulated to determine the perturbed fission-neutron density. This, however, isdone in such a way that every generation gives a contribution to the estimate of 8k.Let us assume again that an asymptotic, unperturbed fission-neutron density, S(r), isreached in a preliminary stage of the simulation. A specific scheme Is followed from thispoint. Let a first-generation "distribution" be determined according to the relationA,(r) = jdr'8Z(r,r')S(r') (6.142)<strong>and</strong> let the distribution, A n + 1 (r), of the successive generations be simulated according tothe equationA n + 1 (r) = jdr'Z(r,r')A„(r') (6.143)The last equation defines a procedure analogous to the iterative simulation of the perturbedfission-neutron density defined in method three of Section A. The main difference between,the two simulations is that in the procedure defined by Equations (6.142) <strong>and</strong> (6.143), theinitial distribution is not necessarily everywhere positive fA,(f) is the difference of the
372 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationsfission-neutron densities resulting from the r<strong>and</strong>om walk of particles started from S(r) <strong>and</strong>migrating in the perturbed <strong>and</strong> unperturbed systems, respectively]. Therefore, simulation ofthe game between the n-th <strong>and</strong> (n + l)-th generations defined by Equation (6.143) mayinvolve particles wath negative weights. Let us observe that no renormalization of the numberof particles is assumed in the procedure, <strong>and</strong> therefore the perturbation of the multiplicationfactor will be determined according to Equation (6.137). If Z„(r,r') denotes the n-th iterateof the integral kernel Z(r,r'), then Equation (6.143) can be rewritten asA„ +I(r) = j dr„j dr n_,... J dr,Z(r,r n)Z(r,„r„_,).. .Z(r,,r,) A,(r,)[dr'Z„(r,r') A 1(I-') (6.144)If the perturbed <strong>and</strong> unperturbed densities were iterated independently, then their n-th iteratewould readS„(r) = |dr'Z„(r,r')S(r) (6.145)<strong>and</strong>S n(r) = Jdr'Z n(r,r')S(r) = k e" f,S(r) (6.146)i.e., the n-th iterate of the density perturbation would take on the formSS N(F) -•- S n(T) - KJ ffS(r) (6.147)Now, it follows from Equations (6.142) through (6.144) that the "density" in the iterationprocedure above is related to the iterated real densities asA n + 1(r) = |dr'Z n(r,r')Jdr"8Z(r',r")S(r")= |dr'Z„ +1(r,r')S(r') - Jdr'Z n(r,r')|dr"Z(r',r")S(r")= S n+1Cr) - k effS„(r) (6.148)Consequently, we haveA n + 1(F) + k e,AW = S n+1(r) - KfX-Ar) (6.149)<strong>and</strong> since the perturbed iteration is assumed to start from the converged density S(f), i.e.,S 0(F) = S(r) (6.150)we haven2 K^"'A n,(r) - S n(F) - K^S(r) = 8S„(r) (6.151)
373The perturbation of the effective multiplication factor, Equation (6.137), is estimated in the(n + l)-th generation asSk n= [(f.ZSJ - (f,ZSJ - k eff(f,8S„)]/(f,S n)The first two terms in the numerator can be simplified, in view of Equations (6.145) <strong>and</strong>(6.146), as(f,ZSJ - (f,ZSJ = (f,S n + 1) - (f,S n + 1) = (f,8S n + 1) (6.152)i.e., the numerator, after making use of Equation (6.151), becomes(f,8S n + 1) - k eff(f,8S„) = (f,A n + 1) (6.153)The denominator follows, again from Equation (6.151), as(f,SJ = V k e" ffm(f,AJ + Ktf,S) (6.154)M = 1Combining the expressions in Equations (6.153) <strong>and</strong> (6.154), the perturbation of the effectivemultiplication factor is expressed in the (n + l)-th generation asnSk n= (f,A n+1)/[k* ff(f,S) + 2 Ie^m(f,A 1J] (6.155)The estimation of 8k is thus reduced to repeated estimations of the reaction rates (f,A M)during the simulation of the successive generations. Note that the reaction rate (f,S) <strong>and</strong> theunperturbed multiplication factor are supposed to be known at the beginning of the procedure,since the estimation of the perturbation is started after an asymptotic, unperturbed fissionneutrondensity has been reached. The iteration is continued until Sk nis converged at a.predetermined level. It is interesting to examine the estimate of 8k c, rafter a single iteration.For n = 1, Equation (6.155) givesM= 18k, = I (f.Z-S) - (f,ZZS)]/(f,ZS)= (f,Z 2 S)/(f,ZS) - k effComparing this expression to Equation (6.141), it is apparent that the previous approach isa special case of Polevoi's method with n = 1. Note that an unbiased estimation of the"density" A 1in Equation (6.142) is not always trivial. A critical analysis of the estimationis given in Reference 28.3. Alternative methods follow from a specific form of the weighting function f(r)appearing in the expressions so far derived. Letf(r) = V(r) (6.156)
374 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationswhere, again, V(r) is the function adjoint to the unperturbed fission-neutron density, i.e.it is the solution of the equationk effV(r) =Jdr'V(r')Z(r',r)Using this weighting function, the last two terms in Equation (6.137) vanish <strong>and</strong> the perturbationof the effective multiplication factor reduces to8k = (V,8ZS)/(V,S) (6.157)This expression suggests a simple estimation procedure that is exact for small perturbations.If we are given a well-converged, unperturbed fission-neutron density S(r) <strong>and</strong> a sufficientlyaccurate approximate adjoint distribution (e.g., by one of the methods presented in theprevious section), then for sufficiently small perturbations, one can neglect the differenceof (V,S) <strong>and</strong> (V,S) when estimating the denominator of Equation (6.157). An estimate ofthe reactivity perturbation exact up to the first order of the perturbation is then obtained as5k = (V,8ZS)/(V,S) (6.158)by correlated sampling of the numerator. This method has the advantage that an estimateof 8k is obtained in a single generation, but also the drawbacks that it necessitates thecalculation of the adjoint density <strong>and</strong> is limited to small perturbations.4. As an alternative to the method above, the perturbation source method 50 introducedin Section 6.1.H can also be applied here. The perturbation kernel 8Z(r,r') follows fromEquation (6.103) as8Z(r,r') = JdE8z(r,E,r')cXP)v(P) + J _dEz(r,E,r')8[ Cf(P)v(P)]where z(r.E.r') is the collision density at about P = (r,E) due to a fission neutron emergedfrom r', <strong>and</strong> 8F denotes the difference of the function F in the perturbed <strong>and</strong> unperturbedsystems. With this partition, the numerator of Eqaution (6.158) reads(V.8ZS) - JdPV(F)(CXP)V(P)^1(P) + 8[ Cf(P)V(P)]VIi(P)} (6.159)whereiji(P) = jdr'z(r,E,r')S(r') (6.160)is the collision density due to the fission source S(r') <strong>and</strong>IJi 1(P) = Jdr 08z(r,E,r 0)S(r 0)The perturbation of zir.E.r') follows from Equation (6.100) as8z(r,E,r„) =JdP"8z(r',E',r 0)K s(P",P)idP"z(r',E',r 0)8k s(P",P) +8[ x(E|r 0)T(r 0-*r|E)]
375where P" = (r',E'). Multiplying this equation by S(Jr 0), integrating with respect to :r„, <strong>and</strong>taking into account that, in view of Equation (6.101), S(r c) can be written asS(r') =JdE'4»(P")c t(P")v(P")/k clTwe have the following equation for 1Ji 1(P)4, (P) = [dP"4i,(P")K s(P",P) + jdP"ili(P")x |sk s(P",P) + ^-" Cf(P") V(P")8tx(E!i-')T(r' »r|E)]j(6.16s)where we have made use of the relation in Equation (6.160). Equation (6.161) is a transportequation defining the collision density IJi 1(P) in a nonmultiplying system. The first-flightcollision density in the equation is represented by the second integral on the RBS, <strong>and</strong> itcontains ty(P). The simulation of this collision density consists of two steps, In the firststep, the original collision density ip(P) is determined in an ordinary nonmultiplying gamewith a source S(f), <strong>and</strong> the first-flight collision density of Ip 1(P) defined in Equation (6.161)is also established. In the course of this step, the second term of Equation (6.159) is estimatedas a reaction rate due to the collision density i|/(P). In the second step of the simulation, thefirst-flight collision density [second term in Equation (6.161), determined in the first step!is used to simulate 4•,(P) in Equation (6.161), <strong>and</strong> the first term in the reactivity perturbation.Equation (6.159), is determined through an estimate of the corresponding reaction rate with1Ii 1(P). Note that both steps involve nonmultiplying games since Ji(P) is produced by thefixed fission source S(r), according to Equation (6.160), <strong>and</strong> IJi 1(P) obeys the nonmultiplyingtransport equation (6.161). More details of the practical realization are given by Matthes-'' 0<strong>and</strong> Hoffman et al. 355. The perturbation source method presented above is exact up to the first order of theperturbation because (V,S) in Equation (6.157) was approximated by (V,S) in the expression(6.158) of the reactivity perturbation. Hoffman et al. 35 propose a modification of the procedurenot limited to first-order perturbations. The modification is based on the fact that themultiplication factor of the perturbed system is also an eigenvalue of the adjoint perturbedequationk cffV(r) =Jdr'V(r')Z(r',r)<strong>and</strong> therefore, for arbitrary function f(r), it is expressed ask eff=(V,SZf)/(V,f)Now, putting f(f) = V(f) (the adjoint density in the perturbed system) <strong>and</strong>Equations (6.135) <strong>and</strong> (6.162), respectively, the perturbation of the effectivefactor readsSk = k eff- k e(r= [(V 7ZS) - (V,ZS)j7(V,S) =- (V,8ZS)/(V,S) (6.163)
376 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> CalculationsEstimation of this quantity involves determination of the perturbed adjoint distribution V(r)<strong>and</strong> the estimation of the perturbation-related reaction rate in the numerator. A possiblerealization of the estimation by the perturbation source method is described in detail inReference 35. Obviously, Equation (6.163) contains no approximation <strong>and</strong> therefore, inprinciple, it makes an exact estimation of 8k possible.The methods presented in subsections 3 through 5 have the common feature that theiraccuracy (unbiasedness) depends on the accuracy of the approximation to the adjoint densitiesused as weighting functions in Equations (6.158) <strong>and</strong> (6.163). In contrast to this, the exactnessof the methods in the first two subsections does not depend on the choice of the weightingfunction in Equations (6.139) <strong>and</strong> (6.155). f(f) only influences the variance of the estimates,while their unbiasedness depends upon how well the perturbed fission density is reproduced.Finally, we note that all the methods presented in this section can also be formulatedin terms of the fission-point density cp,-(P) <strong>and</strong> kernel U(P,P") introduced in Equations (6.108)<strong>and</strong> (6.109) in Section A. Zolotukhin <strong>and</strong> Usikov give the expression corresponding toEquation (6.163) in the fission-point density formalism, along with a number of applications<strong>and</strong> approximations 86 .G. PARAMETRIC DERIVATIVES OF k e„Let us assume that the effective multiplication factor depends on a system parameter a.Let 8k be the perturbation of the effective multiplication factor due to a change Aa of a.In this section, we give an estimation method of the parametric derivative dk/da as the limitof Ak7Aa, while Aa tends to zero.Consider Polevoi's method for estimating the reactivity perturbation 8k (Section F,subsection 2). This method is based on successive determination of the "difference distribution",A n(r), according to Equations (6.142) through (6.144). Let A n(r) denote the "differencedistribution" produced by a parameter change Aa <strong>and</strong> let us define the limit3„(r) =lim A„(r)/A«Aa-*0We shall assume that taking the limit Aa —> 0 <strong>and</strong> integration are interchangeable; then itfollows from Equation (6.142) that= Jdr' "3 — Z(r.r')daS(r')This equation defines a <strong>Monte</strong> <strong>Carlo</strong> game which starts from the equilibrium fission-neutrondensity S(r), is played according to the derivative kernel dTJda, <strong>and</strong> results in the "fissionneutrondensity" dj(f). The simulation <strong>and</strong> estimation of the reaction rate (f,d,) is analogousto the reaction rate estimation in a fixed-source differential game (cf. Chapter 6.II). Furtheriterates of d n(r) follow from Equation (6.143) after division by Aa <strong>and</strong> taking the limit Aa0 asd B+l(r)= Jdr'Z(r,r'K)„(r')Accordingly, (")„., {(r) is the hypothetical "fission-neutron density" due to the "source distribution"djf) in a game governed by the unperturbed kernel '/.. The simulation poses nospecial problems, compared to a fixed-source game, except for the possible appearance ofnegative statistical weights. The reaction rates (f,d n) can be easily estimated, <strong>and</strong> the n-th
377iterate of the derivative of the effective multiplication factor follows from Equation (6.155)asda(f,d n+s)/K tt(f,S) (6,164)since lim S n= 0. In practical cases, it is reasonable to assume thatA^Olim ^ = ^ (6.)65)da dawhich means that Equation (6.164) can be considered as an estimate of dk/d« in the n-thgeneration. Equation (6.164) <strong>and</strong> expressions of the higher-order derivatives of k effwerederived by Mikhailov 57 as early as 1967.An alternative method proposed by Takahashi 81is based on a direct estimation of thereaction rate-~ fdP W ) c f(P) v(P)da da Jwhich follows from Equation (6.93) by differentiation. The simulation is equivalent to a.fixed-source differential game.IV. ESTIMATION OF FLUX AT A CERTAIN POINTIn certain (mainly radiation shielding) problems, It is necessary to estimate the neutronflux at the sites of a number of detectors. If the finite dimensions of the detectors areaccounted for, the <strong>Monte</strong> <strong>Carlo</strong> procedure can be (in principle) based on the reaction-rateestimation methods reviewed previously. In the majority of such problems, however, it isdesirable to neglect the presence of the detectors, <strong>and</strong> the particle's flux at given spatialpoints is to be determined.At first glance, estimation of pointwise quantities would appear to be inconsistent withthe capabilities of transport <strong>Monte</strong> <strong>Carlo</strong> methods. Nevertheless, these methods can be madesuitable to flux-at-a-point estimations. A possible method of pointwise calculations, theadjoint <strong>Monte</strong> <strong>Carlo</strong> simulation, was introduced in Chapter 4. VI!. If the particles originatefrom an extended source <strong>and</strong> the flux (or some related quantity) is to be estimated at a singlepoint, then the adjoint game fits the problem. However, if the flux, has to be determined atseveral points, then an adjoint game is to be played as many times as the number of detectorpoints. Moreover, if the flux at a point due to a. point source is the quantity of interest, thenthe adjoint simulation faces the same difficulty as the direct game (the detector in the adjointgame is equivalent to the source in the direct game).A special estimator of flux at a point was first proposed by Kaios. 37This estimator canbe easily incorporated into any direct game without considerable alterations of the simulation.The estimator is derived in Section A, <strong>and</strong> it is shown to have the disadvantage of resultingin an unbounded variance. Divergence of the variance, in turn, yields a slower convergenceof the average score to its expectation than in estimates with finite variances (Section B).In order to avoid or relax the difficulties related to the singular variance of the simplestestimator, several alternative estimators were proposed, some of them using special nonanalogestimation procedures. 22 ' 23 ' S8 - 69 ' 76 " 8 " Details of newer developments along with anextensive list of earlier results are given in the report by Kalli <strong>and</strong> Cashwell. 39
378 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> CalculationsIn this Chapter, we give a systematic derivation of a number of analog estimators thatfollow from each other by taking expectations over more <strong>and</strong> more distant events. Thesuccessive estimators have better <strong>and</strong> better convergence properties (Sections C <strong>and</strong> D).Practical modifications of the various estimation procedures are discussed in Section P.. Allthe considerations are presented for the case of a single detector point. Generalization ofthe procedures to multiple detectors, although it presents certain practical questions, isstraightforward.It is our belief that in spite of the considerable effort invested by numerous researchersin the elaboration of more <strong>and</strong> more refined procedures, the estimation of flux at a point isnot yet solved satisfactorily.A. THE NEXT-EVENT POINT ESTIMATORThe basic difficulty in estimating flux at a point follows from the fact that the probabilityof playing a history that has a collision at the selected point is zero. It brings us a littlecloser to the solution of the estimation problem if we remember that expectation-type estimatorsalso gather scores from points which are not reached by the actual history. Let usconsider what this trick involves in the case of point estimation. The flux at a point r* canbe written in the form of a ''reaction rate" as
579where P* = (r*,w*,E) = (r*,E*). With the explicit forms of the kernels, the equationreads(p(r*) = dr' dEQ(r',w*,E)T(|r' - ^',oi^Eyflr' - r*|-o-(P*)]dr' dE'u>(r',E')^ dEC(w',E'-~»fa>*,E[r')T(jr' - r*!|r',*,E)/|r' - r*| 2 o-(P*)] (6.166)where T(Jr' — r*||r'.*»*,E) is a shorth<strong>and</strong> notation for the integral of the transition kernelaccording to the relationTfJr' - r*jjr',to*,E)/[|r' - r*| 2 a(P*)]dE'dw'T(P'.P +)Ar(P*)Jdr*|*,E) l\r' - r*| : (6.167)<strong>and</strong>to* = (r* - r')/|r' - r*|Equation (6.166) defines an estimation procedure in which the source particles contributeto the score according to the first term of the RFJS, <strong>and</strong> the collided particles produce thereaction rate in the second term. In this reaction rate, the weighting function (after interchangingw.E with to'.E') has the formf Es(P') = JdE'C(w,E-*o>*,E'|r')T(|r' - r*||r',«*,E')/[jr' - r.pcr(r*,E'), (6.168)<strong>and</strong> P' = (r'.to.E). This estimator scores in every collision <strong>and</strong> its contribution is equal tothe expected score over the collision <strong>and</strong> the free flight following it. It is easily seen thatf Esin Equation (6.168) is the expected scattering estimator [cf. Equation (5.208)] associatedwith f, in Equation (6.165)f„(P') =JdP"C(P',P")f,(P")i.e., it is, indeed, the expectation of f, over one more event. This estimator no longer hassuch a singularity as f <strong>and</strong> f, above have; analytical calculation of it, however, is usuallycumbersome. Therefore, in practical applications, a one-sample <strong>Monte</strong> <strong>Carlo</strong> estimate ofthe integral in Equation (6.168) is generated. This is performed in the following way,
380 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculations1. At the collision point P' = (r'.co.E). the number of secondaries <strong>and</strong> their energiesE' are selected from the marginal densityC 1(E-S-E'|r',to) = Jdw'Ctw.E-^w'.E ;r'l2. For a secondary of energy E', the quantityf NE(P',P") = C 2(-R.|0dtcrlr + tto^.E) /|r' - r*| 2 (6.170)Note that the estimator f NEin Equation (6.169) also follows from the transformation inTheorem 5.15, Equation (5.214), if we put X -- 1 <strong>and</strong> F(P.P') = L(P.P').C 2(to—>co*|r'.E',H) in Equation (6.169) is the probability of a scattering from thedirection to to to* if the scattering takes place at r* <strong>and</strong> the energy is changed from E toE'. In most practical cases, this probability does not depend separately on to <strong>and</strong> to*, but,rather, only on the scattering anglep.* -- tO • C O J n= co<strong>and</strong> therefore C 2becomesC 2(to-*w*|r',E',E) = —2TTy(u.*jr',E',E)The resulting estimator is called the next-event estimator <strong>and</strong> has the formf NE(P',P") = r-p r;y(|x*r',E',E)exp2TT r — r*-R — R*|1dto-(r'+tto*,E')'0(6.171)
381This estimator, unlike f, in Equation (6.165), gives a contribution to the final score in everycollision (from which a secondary emerges) irrespective of the actual postcollision flightdirection. It has, however, the very uncomfortable property that its contribution is unboundedas the collision point r' approaches the detector point r*. It will be seen that the divergenceof the score does not impede an unbiased estimation of the flux, but it does result in aninfinite variance of the estimate. The fact that the expected final score due to the estimatorf NEequals the collided part of the flux at f* follows directly from the derivation of theestimator. This also means that the expected score by f NEis bounded whenever the flux wewish to estimate is bounded. A formal proof of the finiteness may also be given, which willhelp us in further considerations. The second (collided) term in Equation (6.166) is rewrittenas9c(r.) = Jd(r - r*)|r - r.|- 2 JdEiKr,E)f Es(P)|r' - r*!where f Esis the expected scattering estimator in Equation (6.168). The bracketed term isfinite for every f, while the rest of the integr<strong>and</strong> can be written in polar coordinates asd(r -- r^)|r' -- r*|~ 2 = d|r - r^dftresulting in a finite integral. The finiteness of the expectation of unbounded scores in practicalterms means that although certain histories may yield arbitrary high scores, the probabilityof such histories is sufficiently small. (Note that here we take advantage of the very samefact that makes a direct point estimation impossible.)Let us now estimate the variance of the score in a similar way. If M 2denotes the secondmoment of the total score, then M 2is certainly greater than or equal to the first moment ofthe score with a contribution function f£, E(P',F'), i.e.,M 2S= JdP'ih(P')JdP"C(P',P")f?, E(P',P")J= Jd|r' - r*;dll;r' -- r*|- 2 ||dE'i|i(P')[dP"C(P',P")f 3 , E(P',P")!r' - r*| 2 ]Since the quantity in braces is generally nonvanishing at r' = r*, the integral with respectto I r' - r*| diverges, i.e., the variance of the total score is infinite. This fact does notnecessarily imply that the flux estimated with the aid of the next-event estimator is unreliable.In fact, we show in the next section that the average of the estimates from several historiesdoes converge to its expectation, although the convergence is slower than it would be if thevariance were finite.To conclude this section, we note that the next-event estimator introduced in Equations(6.169) <strong>and</strong> (6.171) contributes to the score only for particles that effectively leave thecollision point. In practice, it is customary to use the next-event, estimator in such a waythat the score is attributed to the particle that enters the collision, <strong>and</strong> the average nurrtbe*of secondaries multiplies the score. In this case, the estimator in Equation (6.168) is sampledin the following way:1. A possible postcollision energy is selected from the densitydco'C(w,E-W,E'jr')/c(P') = C,(E-»E'|r', w)/c(P)
382 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationswherec(P') = JdP"C(P',P") =Jde»'Jd£'C(a>,E->w',E'jr')the mean number of secondaries in the collision at P'.2. The quantityf NE(P',P") =c(P')f NE(P\P")is scored irrespective of the number of actual secondaries.B. CONFIDENCE LIMITS FOR SINGLULAR ESTIMATORSBecause of the unbounded variance of the next-event estimator, the classical CentralLimit Theorem does not apply to the empirical mean of several estimates by the next-eventestimator, i.e., the unbiasedness of the empirical mean <strong>and</strong> its rate of convergence to itsexpectation do not follow from the considerations valid for estimates of finite variance(Chapter 3.III.). Kalos has investigated these questions in connection with the next-eventestimator," <strong>and</strong> Dubi et al. amplified the considerations to cover other estimators with lesssevere singularities. 15Here, we take a more general approach based on a special case of atheorem on stable attracting probability distributions. 18Theorem 6.5 — Let £,, £ 2, . . . ,£„ D e identically distributed r<strong>and</strong>om variables with acommon density function p^(x) defined on the semi-infinite interval ( — x 0,+°°). LetdyyP £(y) = 0<strong>and</strong> define the functionU(x) = j^dyy 2 P c(y) (6.172)Let L(x) be a slowly varying function, i.e.. let it be such thatlimL(xt)/L(x) = 1If, for large values of x, the function U(x) behaves likeU(x) ~ x 2 -"L(x) (6.173)with 1 < a -s 2 <strong>and</strong> if there exists a sequence a„ such that for some constant CnL(a n)/a*->C (6.174)with increasing n, then the distribution function of the r<strong>and</strong>om variables„ = 2 Uk
383tends to some stable attracting distribution function G 0(x) as n tends to infinity. If a rj; 2,the stable attracting distribution is normal. The characteristic function corresponding to Q Jy--)isfi a(t) (6.175;withR3 - a)to (I) = VC —a(a - 1)e'<strong>and</strong> the upper sign applies when t > 0; the lower, for t < 0.The theorem provides us with confidence limits <strong>and</strong> also with convergence rates of !(•.eestimates by singular estimators in the following way.Let |x,,u, 2, . . . ,p, nbe estimates of the reaction rate (in fact, flux at a point) R in differemhistories. In the previous section, we have seen that they are unbiased i.e.,(p.,) =KSince the next-event estimator contributing to(A 1has an j r — r*h 2 ~type singularity, thefinal score p^ will have the same type of singularity. We shall show that the r<strong>and</strong>om variablesI 1- (li, - R)/R(i = 1,2, . . . , n) satisfy the conditions of the theorem, <strong>and</strong> therefore the distributionfunction of the variableS n= S UK - - [-' V p., R |/Ri=i K Ln i = i jwith suitably chosen constants a ntends to the stable attracting distribution G 0,. This meansthatP-obi- 1 - (-' VU n\ni = 1^Rl R < t\ - - - - -G„(e)or equivalentlyProbjn ,= 1< eRa„/n G a(e) - G„(-e) = B(e) (6.176)Equation (6.176) amounts to saying that with a probability 8(e), the estimated total scoreI -O- E P-,n i=idiffers from its expectation R by no more than e(Ra„/n) for a sufficiently large number ofhistories. The convergence rate is of the order of a n/n.
384 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> CalculationsThis statement is meaningful only if lim a n/n =0. Now if the r<strong>and</strong>om variable inquestion satisfies the conditions of Theorem 6.5, then from Equation (6.174),. Ua n) .. a„lim -—- ; : lim —with 0 < a =£ ). Thus, it remains to show that for a slowly varying function L(x), thelimiting relationlim L(XVx 1 * = 0holds for a > 0. Assume that the opposite statement holds, i.e., suppose that, for somenonzero Alim L(x)/x a = A 7 0Then obviouslylim L(tx)/(tx)" =Afor any t > 0, <strong>and</strong> therefore.. L(tx)/(tx)°urn ——— = 1L(x)/x"On the other h<strong>and</strong>, since L(x) is slowly varyingL(tx) (tx)« (tx)°t a^ ,km ~ — = lim —— == t" ^ 1x—->co L(^x) x xwhich contradiction is resolved if <strong>and</strong> only if A = 0, i.e. if a n/n tends to zero with increasingn.It is remarkable that the confidence limits are expressed in terms of the expected value,R, in contrast to the nonsingular case where the st<strong>and</strong>ard deviation appears in the confidencelimits.It remains to determine the values of a„. Let us consider the general case when thesingularity of the final score in a history has the form(x(r) ~ R/[(k + I)r k ]where r = |r — r*|, the minimum distance of the collision points in the trajectory from thedetector point. [We leave the exponent k undefined instead of setting k = 2 because of theestimators with a singularity 1/r (k = 1) to be investigated in the next Section.] For thesake of simplicity, we assume that the probability density function of the minimum distancer isp
3§SIo the case of the next-event estimator, this assumption is roughly equivalent to the assumptionthat the collision points are uniformly distributed in a sphere around r*.Obviously(u2> =dr|x(r)p t.(r) = R<strong>and</strong>(pr) == J odrjx 2 (r)p r(r) = +ocwhere, again, brackets denote expectation. Under the simplifying assumption on the distributionof r <strong>and</strong> the score JX, the probability density function of the score readsP^(M-)d£dp,[R/(k + l)]"y- ( 2 + " k >, R/(k + 1) s= [c < +soWe now introduce the r<strong>and</strong>om variableI = (jx -R)/RIt has zero expectation <strong>and</strong> its probability density function isp £(x) = [k(k + l) 1,k ] '(x + l)- < 2 + 1 , k ) , x„ = -k/(k + 1) =s x < +'It is seen by simple integration that for x >>Idyy 2 P ;(y)C 1X*-"*^ - i) if k > 1C,Iog ex if k = 1with C 1= (k + 1 )'" 1/k , <strong>and</strong> therefore condition (6.173) of the theorem holds witha = (k + l)/k (6.17?)Now, if k > 1, then L(x) = 1 <strong>and</strong> a nin Equation (6.174) isa n= n"« = n k / f t + " (6.178)i.e., the convergence rate of the empirical mean isa„/n = n-" ( k + , )On the other h<strong>and</strong>, if k = 1, then a = 2 <strong>and</strong> L(x) = log cx. The constant a nfollows fromEquation (6.174) asa„ = (nlog en) !/r " = Vniogm (6,179)
386 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculations<strong>and</strong> the convergence rate isa n/n = (log en/n) 1/2As a consequence of the above results for k = 2, the next-event flux-at-a-point estimatoryields a total score that converges to its expected value at a rate of Un 1 ' 3 . Dubi et al. 15 givetabulated values of the stable attracting distribution function G 3 ' 2that is to be used to determineconfidence intervals according to Equation (6.176). They also show that the correspondingdensity function is not symmetric, <strong>and</strong> values below the expected value are more probablethan those above it. This means that the next-event estimator tends to underestimate the fluxat a point. (The correct expectation is then obtained by less frequent, but more deviatingoverestimated values.)Obviously, the n" 1 ' 3convergence of the total score with the next-event estimator ismuch slower than the regular n~ vlconvergence obtained with the usual bounded varianceestimators. It is therefore desirable to find alternative methods that make the convergencefaster. Iu view of the results of this section, it seems reasonable to seek estimators withonly first-order singularity (k = 1, i.e., a = 2) since, in addition to their faster convergence,the stable attracting distribution associated with them is normal. Therefore, there is no needto calculate the values of complicated functions in order to establish confidence limits.It should be emphasized that an estimator with a first-order singularity is defined as acontribution function that tends to infinity as 1/r with decreasing r <strong>and</strong> the probability densityfunction of the distance r is p r(r) — 2r. Such estimators exist, as will be seen in the nextsection, <strong>and</strong> they have infinite variance. On the other h<strong>and</strong>, for the estimators to be introducedin Section 1), the contributions diverge like 1/r, but the density of the distance r is p r(r) =3r, which makes the variance of the estimators bounded <strong>and</strong> the convergence regular.C POINT ESTIMATORS WITH FIRST-ORDER SINGULARITYWe have seen that by taking the expectation of an estimator over a possible event, partof the singularity in the estimator can be removed. Therefore, we expect that inclusion ofone more event in the analytical expression of the estimator would yield further reductionof the level of singularity. This expectation is justified in this section. It was shown inSection A that the next-event estimator in Equation (6.171) is an unbiased estimator of thecollided part of the flux at a point. Thus, any particle that contributes to the score throughthis estimator has experienced at least one collision. Specifically, the mechanism of scoringis the following: a particle starts a flight from a phase-space point P, enters a collision atP', <strong>and</strong> if a secondary leaves at P", it will add f NE(P',P") to the score [cf. Equation (6.171)].We have also seen that the expected score over the collision at P' is f Es(P') in Equation(6.168). Let us now consider the expectation of the score due to the starter at P. Thisexpectation isI(P) =dP'T(P,P')f Es(P')= dDT(D|r,w,E)f Es(r + Dw,E) (6.180)where P = (r,E), P' = (r'.E) = (r + D co,E), <strong>and</strong> according to Equations (6.168) <strong>and</strong>(6.169)(6.181)Let us denoteg(P,P') = gir.r + Dw 1E) = T(D|r,
387LDFIGURE 6.1.Geometry in scoring with partially unbiased estimators.Since f Eshas a l/[r' — r*| 2 singularity, g(P',P") is bounded <strong>and</strong> the expected score inEquation (6.180) readsI(P) = dDg(r,r + Dw,E)/|r + Dw - rj 2JoLet us now introduce the angular variable P in Figure 6.1 instead of the distance D. Let pincrease clockwise, starting from the line from r* perpendicular to to. Then (3. (0,p 2) 0,<strong>and</strong> it is seen from the figure that|r' — r*| =b/cospD = D(P)= b(tgp -- tgp,)<strong>and</strong>dl.) = b/cos 2 (3If r b= r + Lw is the point at the boundary of the domain of simulation along , i.e., ifg(r,r + D co,E) = 0 for D > L, thenI(P) = 7- f dfigir.r + Dtpxo.E) ^ •ULP). D(P 2) = L (6.182)b Je,bNow, since g(P,P') is bounded, so islim bl(P)b->0
388 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationsi.e., the expected score over a flight has a 1/b-type singularity in contrast to the 1/jr' —r*| 2 singularity of the eventwise estimators. I(P) can be easily sampled by selecting a (3value uniformly in [(3,,(3,], i.e., it may also serve as an estimator which has better propertiesthan the next-event estimator. On the other h<strong>and</strong>, it was seen in Chapter 5.Vl that theexpectation estimator f F(P) — I(P) is a member of a broad class of partially unbiasedestimators, <strong>and</strong> there exist several other estimators with similar properties. By analogy tothe class of partially unbiased reaction-rate estimators, a similar class of point estimatorscan also be defined. We shall show that all estimators belonging to the class have a singularityat least as severe as 1/b, <strong>and</strong> therefore it is pointless to seek bounded variance estimatorsamong the commonly used ones.Before doing so, let us discuss in some detail the variance of estimators with 1/bsingularities. Taking the example of the expectation estimator I(P), the dominant term ofthe total second moment for small b isOne is tempted to believe that the 1/b 2singularity drops out, as has happened to thel/|r — r*| 2singularity in the expectation of the next-event estimator. This, however, is notthe case because jr — r*j <strong>and</strong> b are essentially different quantities. The former is the distanceof a collision point (spatial integration point in the second-moment integral) from the detectorpoint r*, while the latter is the distance of a possible flight direction from r*. Their probabilitydensities are different, as follows from the following simplified reasoning. The collisionpoints are assumed to be uniformly distributed in some volume around r* <strong>and</strong> therefore theirdensity function is proportional to 3r 2 dr. The product of the probability density of r <strong>and</strong> thesingularity 1/r 2 is bounded, thus resulting in a finite expectation. As for the density of d,let us consider a given flight direction <strong>and</strong> a plane perpendicular to it that contains the pointr*. The crossing points of the. possible flights in the given direction with the plane areapproximately uniformly distributed over a surface on the plane around r*. Therefore, thedensity function of b is proportional to the area element of the surface, i.e., to 2rdr. <strong>and</strong>,again, only the expected score remains bounded. This also means that Theorem 6.5 appliesto the estimators considered in this section, <strong>and</strong> an estimator with a 1/b singularity providesa total score that converges to its expectation at a rate of (log rn/n U2 .Let us now consider the class of partially unbiased point estimators generated by thetransformation of the expected scattering point estimator f Es(P') according to the formulasin Section 5.VLB. Again. P = (r,E). P' = (r + D w,E), P 1= (r + D,w.E), <strong>and</strong> P 2=(r + D 2co.E). Then, according to Equation (5.223), the transformed estimatorf(P,P') dD, T(D,|r,w,E)X(D,D I)f Es(r + D,w,E)/(6.183)is also partially unbiased, with an arbitrary function X(D 1,D). Here againT(D|r,w,E) = cr(r + Doj,E)exp - dto(r Mw.t-3
389Let us denoteThen Equation (6.183) reads,E) = T(D 1|r,w,E)X(D,D 1)f I,. s(r + D 1w,E)|r + D,w - r*j 2 /1dD 2T(D 2|r,w,E) X(D,,D 2) (6.184)f(P,P') = dD,g(D,D 1|r,E)/|r4-D,w-r ; l !Changing the integration variable D 1to the angular variable ($, as above (cf. Figure 6. i,with D 1in place of D), the transformed estimator becomes(6.185)where P 2is determined by the maximum flight length from P along to over which contributionis possible. Now for nonnegative bounded functions X, the function g(D,D,jr,E) in Equation(6.184) is also bounded <strong>and</strong> the transformed estimator has a 1/b-type singularity. With lessregular functions X, g may also be singular <strong>and</strong> the singularity of the transformed estimatormay be more severe than 1/b. Finally, since according to Theorem 5.17 any partially unbiasedestimator follows from f Es(P') through a transformation of the form in Equation (6.183), wehave the following theorem.Theorem 6.6 — Partially unbiased fiux-at-a-point estimators are necessarily unboundedfor events in the neightborhood of the detector point. They increase at least as fast as 1/b,where b is the distance of the detector point from the flight line. The variances of the totalpoint-flux estimates by these estimators are also unbounded, <strong>and</strong> the convergence of theempirical mean of the scores from n histories to the expected value may not be faster than.(log en/n) 1/2CiThe estimation procedure by f(P,P') in a flight from P = (r,E) to P' = (r + D on,E)consists of the following steps:LAP2. The distancevalue distributed uniformly in [P nP 2] is selected.D 1(P) = b(t gp - tgp s)corresponding to the selected P value is calculated.3. The contribution f Es(r + D 1w,E) is determined, e.g., with the aid of the next-eventestimators f NE(P',P") or f NE(P',P"), as described in Section A. The quantity ofg(D,D,|r,E) is determined according to Equation (6.184)4. The quantityS 1= (p 2-p,)g(D,D,|r,E)/bis scored.
390 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> CalculationsLet us now consider two simple examples of partially unbiased point estimators. It wasshown in Section 5.VI.B that choosing X(D,D 1) = 1, the transformed estimator is theexpected score over the next flightf(P,P') = I(P)as also discussed at the beginning of this section. In this case, according to Equation (6.184)g(D,D,|r,E) = T(D,Sr,w,E)f Es(r4-D iw,E)|r4-D 1aj^r H!j 2If f Fsis sampled with the aid of the next-event estimator in Equation (6.169), the score froma flight that starts at P readss, = ~bP'1(0,(8)^,103)^(0)^00^^,3-3)1(0^^^10*^')/^^^')where r, - r D 1to <strong>and</strong> r* = r + D* *. Alternatively, by puttingX(D.D 1) = 1 for D 1> D<strong>and</strong> zero otherwise, the track-length estimatorft P.P') = j o dD,o-( r f D,w.E) f, Jr + D,to.E)is obtained. The corresponding g function isg(D.D,|r.E) = (T(P 1)UP 1)Ir 4- D 1W - r*| 2 ; P 1= (r + D.w.E)This function is bounded (except for the degenerate case of a = + 0 0 ), <strong>and</strong> therefore itfollows from Equation (6.185) that the track-length point estimator has a 1/b singularity.The interval of the angular variable B is determined from the relationsD 1(B 1) = 0, D 1O 2) = Dwhere D is the distance of the next collision point P' from P. The score by the track-lengthestimator in a collision at P followed by a flight to P' isS 1= —- 1 1 — JbC.(6^w*|r'.E'.E)T(D*|r.,.oj*,Il')rr(r 1.E)/tr(r H,.E')provided the next-event estimator is used to sample f Es.by Rief et al. 15 - 68 - 69 .This estimator was first proposedTwo comments are to be made here. Let us first note that the estimation procedureabove is based on the one-sample <strong>Monte</strong> <strong>Carlo</strong> evaluation of the integral in Equation (6.185).Obviously, steps 1 through 4 can be repeated several times for a given flight, <strong>and</strong> the averageof the scores so obtained will be a better estimate of the integral than the single-trial sample.Execution of the estimation steps, however, requires approximately the same computingtime as the generation of a new flight. Therefore, it is not at all clear, in general, whetherthe accuracy of the estimate from a given flight or the number of different flights (histories)
391is to be increased in order to obtain a more reliable estimate in a given amount of computingtime.Second, let us observe that sampling a distance D 1(P) in Equation (6,184) is essentiallyequivalent to the method of "pseudo scattering" or "delta scattering" (Section 5.V.H).This means that the estimation procedure above can also be introduced with the aid of anonanalog transition kernel that defines delta-scattering events with a certain probability. Amodification of the next-event estimator with delta-scattering events was proposed byMikhalov 58<strong>and</strong> was shown to exhibit a 1/| r — r*| singularity. Although this type ofsingularity in an analog game would result in a bounded-variance final score, introductionof delta scattering (as a nonanalog event) increases the frequency of collisions in the neighborhoodof r*, <strong>and</strong> therefore the distance r = |r — r*| between the collision points <strong>and</strong> thedetector point is distributed approximately like 2rdr instead of the analog distribution 3r 2 dr.Consequently, this type of singularity also results in an unbounded variance' 18<strong>and</strong> a convergencerate of Vlog en/n.I). BOUNDED-VARIANCE POINT ESTIMATORSSince Theorem 6.6 excludes the possibility of finding a bounded-variance partiallyunbiased estimator, any estimator with bounded variance must account for not only an.intercollision free flight, but also the collision process preceding it. Let us consider a partiallyunbiased estimator with a 1/b singularity, as given in Equation (6.185), i.e., letwhere g(P,P') is bounded <strong>and</strong> b is the distance of r* from the flight direction. Assume thata particle with a direction to, <strong>and</strong> energy E 0enters a collision at r. The expected score inthe next free flight(s) of the progeny coming out of this collision is(6,186)where P 0= (r,W 0,E 0) <strong>and</strong> I(P) is the expected partial score in the next flight from P : =(r.to.E) of a particle. According to Equation (6.182), it has the form1I(P) = - g(P) (6.187)where g(P) is bounded. Equation (6.186) is rewritten aswhere again<strong>and</strong>(6.189)C 2(w 0-^w|r,E,E 0) -- C(w 0,E 0-^to,E|r)/C 1(E 0-^E|r,w 0) (6.190)
392 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculations""\ \ b IXCJ 0rFIGURE 6.2.Geometry in scoring with once more collided flux estimator.Let us assume that the direction M is expressed in terms of the angles relative to the lineconnecting r <strong>and</strong> r*. i.e., with the notations of Figure 6.2.to =to(E.X)Thendta = sinOdHdx<strong>and</strong>b = |r — r +| sin© = r • sin0i.e.,do> = bd6d X/rIf we rewrite Equation (6.188) with the angular variables G <strong>and</strong> X, the expected score readsI(Po) = - r j dEC,lE,,->F!r.co„)7 X P d H 27r 2 C 2( Wo^co(e,x)|r,E,Fg[bI(r, W(0,x).E)3^ fdECXE^Elr^jjJ " D XJDEC,(to„-a>(6.x)|r.E.F,)dDT(D|r,w,E)f(r,E,r + Dw,K) (6.191)
393Now, since bl(P) = g(P) is bounded, the expected score 1(P 0) has a 1/r singularity <strong>and</strong> thusa finite variance. Therefore, 1(P 0) itself may serve as an estimator of the flux at r*. In mostpractical cases, the integrals in Equation (6.191) cannot be evaluated analytically, <strong>and</strong>therefore 1(P 0) is estimated by the one-sample method <strong>and</strong> with the aid of an estimatorf(P,P') with 1/b singularity in the following manner:1. The number of secondaries <strong>and</strong> the postcollision energy E of every secondary in acollision at P 0is selected from the marginal scattering kernelC,(E (,~->E|r,w 0)Then for each secondary, the next steps are to be repeated.2. The angles x <strong>and</strong> 0 are selected from a uniform distribution over [0,2Tr] <strong>and</strong> [0,ir],respectively, <strong>and</strong> the direction io(8,x) is determined. Let P = (r,«,E).3. A possible next collision point P' = (r + D w,E) is selected from the transitbrtkernel T(P,P').4. The contribution s, from an estimator f(P,P') of singularity l/b is determined accordingto steps I through 4 in the previous section.5. The quantitys„ = 2Tr 2 C 2(co 0-^co(e, X)!r,E,E 0)bs 1/r= 2TT 2 0 2- ^^^(^^(e^jIr^.EjgTD.D.lr.Eyr (6.192)is scored.Certain possible practical modifications of the procedure above are obvious. 'Thus,, ifthe angles x <strong>and</strong> 0 are sampled from some density function h(6,x) instead of the uniformdensity in step 2, then the score becomess c= [C 2(w 0-^(o(e,x)!r,E,E 0)/h(e,x)]b Sl/r (6.193)Furthermore, if one prefers scoring before the number of secondaries in the collision isdetermined, then step 1 is modified thusly:1' a possible postcollision energy E due to a collision at P 1, = (r,co 0)E 0) is selected fromthe marginal densityC,(E 0^E[r,w 0)/c(P)Accordingly, the score in step 5 becomess„ = 2Tr 2 C 2(w 0-^w(e,x)!r,E,E 0)c(P 0)bs,/r (6,194)The estimator introduced by the above procedure is called the once-more collided flux-ata-pointestimator since it scores from events which are two collisions ahead. Note that whenusing the once-more collided estimator, source particles also contribute to the collided pariof the flux. In the case of source particles, the first collision in step 1 is replaced by theselection of the initial coordinates. Thus, if Q(r,a»,E) is the source density, then the expectedscore corresponding to Equation (6.191) readsI 0= ~ JdrJdEQ,(r,E) Jf & j[ £ 2 1r 2 Q 2(w(e,x)|r,E)jM(r,«(e, x),E)]
394 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> CalculationswhereQ 1Cr 1E) -jdwQlr.to.E)<strong>and</strong>Q 2(«|r,E) =Q(r,w,E)/Q,(r,E)In this case, step 1 above is replaced by the step1" The site r <strong>and</strong> energy E of a starter is selected from Q,(r,E). Furthermore, C 2in Equations(6.192) through (6.194) is to be replaced by Q 2above.All the considerations of this Chapter concern analog games <strong>and</strong> no attempt was madeto introduce nonanalog kernels appropriate for eliminating the singularities. In many of thepoint-flux estimation methods, the 1/r 2singularity of the next-event estimator is transferredto the transition kernel, thus reaching a bounded variance. 19,76 ' 78These methods have thecommon disadvantage that special measures arc to be taken to avoid unwanted fluctuationsof the statistical weights. We will not discuss such schemes; the interested reader is referredto the literature quoted.To conclude this section, we note that two problems remain unresolved. First, the direct(uncollided) distribution of the source particles to the flux at a point [cf. Equation (6.170)]still has an unbounded variance if the estimation point (detector) is embedded in the sourceregion. This problem cannot be avoided by tricks similar to those yielding bounded-varianceestimators of the collided part <strong>and</strong> seems to be persistent in any (nonadjoint) scheme. Second,although (one-sample) averaging of the score over future events eliminates the singularityof the variance, higher moments of the score will be singular, which brings up the samedifficulties in estimating the variance as arose in estimating the mean with the next-eventestimator. Higher moments can be made bounded by averaging the score over further events;however, every averaging step involves duplication of the simulation procedure in the sensethat determination of a contribution is performed through <strong>Monte</strong> <strong>Carlo</strong> procedures similarto those played for the continuation of the history. In practical realizations of the once-morecollided flux estimator, such duplication can be avoided in the majority of events, as willbe seen in the next section.E. PRACTICAL MODIFICATIONS OF THE BASIC METHODSThe motivation for all the effort invested in the derivation of new point estimatorsoriginates from the singular behavior of the next-event estimator near the detector point. Farfrom the detector, the next-event estimator behaves regularly <strong>and</strong> there is no need to applymore sophisticated estimators. For example, if the detector is situated in a vacuum surrounding,i.e., if no collision occurs in the vicinity of the detector point, the next-eventestimator can be safely applied. The same is also true for collisions far from the detector.On the other h<strong>and</strong>, for distant collision points, the contribution of the next-event estimatoris small because of the rapidly decreasing exponential <strong>and</strong> 1/r 2functions in it. Consequently,for such collisions, a considerable amount of computing time is spent with essentiallynegligible influence on the final result.Iida <strong>and</strong> Seki 36propose a very simple method for economizing computational time. Theidea is that a quantityf(P',P") =f NB(P',P")/p(r')
395is scored at every collision with a probability p(r') <strong>and</strong> zero with the complementary probability.Obviously, the expected score with this estimator in a collision from P' to P" isp(r')f(P',P") + [1 - p(r')] • 0 = f NE(P',P")The probability p(r') is chosen asp(r')1 if jr' - r*| < aa 2 /jr' — r*| 2 if |r' — r*| 3= awhere a is some given distance value. Obviously, nonzero contributions from points farfrom the detector are rare.The point estimators discussed in this Chapter are expressed as integrals with respectto one or more phase-space coordinates, <strong>and</strong> contributions by the estimators are determinedthrough one-sample <strong>Monte</strong> <strong>Carlo</strong> evaluation of the integrals. The statistical reliability of theindividual estimates may be improved if the integrals are determined by several independentsamples, as was discussed in Section C. A similar but more elaborate method of improvingstatistics is used in the MCNP code. 7 - 43In this method, pseudo particles are generated inevery collision of an ordinary particle <strong>and</strong> are deterministically transported to a sphericalneighborhood of the detector point. The pseudo particles contribute to the integrals inquestion; the weights of the particles are determined by the probabilities of the transitionsfrom the actual collision points to the spherical neighborhood of the detector. These particlesare later processed as any other ordinary particle. Heuristieally, the generation of the pseudoparticle can be considered as an inner <strong>Monte</strong> <strong>Carlo</strong> simulation of that part of the ordinaryhistory which would reach the sphere around the detector. Consequently, the ordinary particle(which created the pseudo one) is processed further from the collision point independentlyof the pseudo particle, but is killed if it enters the sphere. This procedure is discussed inmore detail in Reference 43 in connection with the DXTRAN routine. Although the methodprovides more detailed information about the neighborhood of the detector point than thesimple one-sample <strong>Monte</strong> <strong>Carlo</strong> estimate, the introduction of an artificial branching processis very time-consuming.Fraley <strong>and</strong> Hoffman 23propose a simple approximate method for h<strong>and</strong>ling the singularityof the next-event estimator. In their approach, the contributions of collisions in the neighborhoodof the detector point are substituted by some averaged value. The idea is that aconstant value h is defined for which the reaction ratesdPt|/(P)f Es(P)<strong>and</strong>R - dP4.(P)f Es(P)|r r*| 2 /b 2Jvare equal. The spatial integrals in the reaction rates above are extended over a sphere ofradius a. The constant b in general depends on the collision density i|/(P), but it can beshown that in monoenergetic isotropic cases for small radii a, it is fairly independent of the
396 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationsflux shape. For energy-dependent problems, it is proposed to tabulate the values of b as afunction of the energy <strong>and</strong> to scoref Ea(P)|r - r*|W(E)in every collision inside the sphere around r •.The perturbation source method introduced in Section 6 IF is also applicable to theestimation of the flux at a point. In this procedure, the conventional next-event estimator isused for collisions outside a sphere around the detector point, <strong>and</strong> contributions determinedby the adjoint flux are obtained when crossing the sphere <strong>and</strong> also if collision occurs insidethe sphere. All these contributions are finite, thus avoiding the singularity of the next-eventestimator. The disadvantage of the method is that knowledge of the adjoint flux in theneighborhood of the detector point is required. A homogenized one-dimensional calculationprocedure of the adjoint flux is proposed in the original communication. 23In all the methods so far mentioned, different estimation procedures are applied outside<strong>and</strong> inside a region (usually a sphere) around the detector point. Such separate scoring mayalso yield some improvement in the determination of the confidence limits even if the singularnext-event estimator is also used inside the sphere. The improvement is due to the fact thatthe part of the score that originates from outside the sphere has no singularity <strong>and</strong> thereforetends toward its expectation at a rate of 1/a/N. Let R o m<strong>and</strong> RJ ndenote the estimates of theflux at the detector point as obtained by the next-event estimator from collisions outside <strong>and</strong>inside a given sphere around r. in n histories, respectively. Furthermore, let V 2be theestimated variance of the score from outside the sphere <strong>and</strong> let R„ u, <strong>and</strong> R,„ be the expectationsof the corresponding estimates. Since R 0111is regular, the distribution of R 11111- R 11111isapproximately normal, <strong>and</strong> with a confidence levelB =
397<strong>and</strong> its expectation isR — R 1n+ R,>utHence, with a probability (J, the difference of the score <strong>and</strong> its expectation is limited asn|R - Rj « e o u l\/V 2 /n + e m-¾ = e out-^= + e m^n" J Vn 1,J (6.195)Note that in the considerations above, it was implicitly assumed that the collision densityinside the sphere is approximately uniform. [This assumption was exploited in constructingthe probability density function p r(r) in Section B).] Uniformity can be checked, for example,by scoring the average collision rate in the sphere <strong>and</strong> comparing it to the estimated collisiondensity at the detector point. More rigorous checking is obvious, but needs more reliable,detailed information on the collision density in the sphere.Use of the once-more collided flux estimator can also be restricted to certain regions ofthe domain of simulation. Let us again define a sphere around the detector point r*. Let P,,= (r,co 0,E 0) be the coordinates of a particle entering a collision at r. If r is inside thesphere, then the once-more collided flux estimator is applied with no condition. If r isoutside the sphere, then the once-more collided flux estimator is combined with the simplenext-event estimator as follows. Let 0 mbe the bevel angle of the cone determined by thesphere <strong>and</strong> the scattering point r. Let us divide the integral with respect to 0 in Equation(6.161) into two parts, one from 0 to 6 m<strong>and</strong> the other from 8 mto ir. Rewriting the integrationvariable M in place of 9 <strong>and</strong> x in the second integral, the expected score by the once-morecollided flux estimator in Equation (6.191) can be rewritten asLet us change the variables x <strong>and</strong> 0 to \i <strong>and</strong> 0, <strong>and</strong> denote10(0,,X 1) = toFinally, let us insert the expressiond« C 2(io 0—>to|r, E,E 0)/ C 2(i = 1 (6.196)Je.E„->co.EJr)d6, C 2(co,,->co,jr,E,E,,)0 mC 2(co,r-.co!r,E.EjH 111Kr 1.co,.E)b j(1 ~ COS0J J(6.197)
398 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> CalculationsFIGURE 6.3.Geometry of combined use of the next-event <strong>and</strong> once more collided estimators.where we have made use of the identitydo> — 2 Tr(I — cos6 m)The expected score in Equation (6.195) reads1(PJ = I 1(P,,) + I 2(P 0) (6.198)where I 1(PJ is given in Equation (6.197) <strong>and</strong>T(PJ = dE dcoC(w 0,E 0-+w,E|r) dDT(D|r,w,E)f Es(r + Dw,E) (6.199)J Je>e mJoNote that f(P,P') in the second term on the RHS of Equation (6.195) is replaced by f Es(P')in Equation (6.199). This can be done since both estimators are partially unbiased. Equations(6.197) through (6.199) suggest the following estimation procedure (cf. Figure 6.3):1. The number of secondaries <strong>and</strong> their postcollision energies <strong>and</strong> directions, E, <strong>and</strong> co.are selected from the original collision kernelC(oj,„E„^w.E|r)For each secondary, the angle 6 between u> <strong>and</strong> r* - r is determined <strong>and</strong> the stepsbelow are executed.2. A free-flight length D is selected from T(Dj r.co.E).3. If 0 < 0 m, then the once-more collided flux estimator is applied in the followingmodified form: \7 <strong>and</strong> O 1are selected uniformly in [0,ir] <strong>and</strong> |0,9 rn], respectively, instep 2 of the previous section, <strong>and</strong> the quantity scored in step 5 there becomesO 111C 2(co 0^w(e„ Xl)|r,E,E 0)1 - cose mC 2(w ir*to(6,x)|r,E,EJ bs,/r (6.200)where S 1is the score due to next event estimation as described in step 4 in Section C.The simulation is then continued by displacing the particle from P = (r,io,E) to P'= (r H- Dto.M.E); the next collision point of the particle is P'.
3994. If O > 0 m, then the particle is immediately displaced to P' = (r + Dto,ia,E) <strong>and</strong> thescore is determined by the next-event estimator at P'.5. The simulation is continued by playing the collision of the particle at P'.Obviously, in the modified procedure, the once-more collided flux estimatorwith low probability if the collision takes place far from the detector. The gain in stime is due to the fact that the once-more collided flux estimator is applied onlyNotice that the estimation procedure under the condition 0 < 0 n]would be more crthan the one formulated in Equation (6.200) without the trick of inserting the identiinto the integr<strong>and</strong>. This trick is analogous to the reselection procedure proposed by<strong>and</strong> Kalos. 76It should be emphasized that the above procedure gives the once-more colliin a collision at P 0. This means that the procedure is to be repeated at the nex :point P' even if the next-event estimator has been used in the current scoring, i.e., in spiteof the fact that a score has already been detected from P'.V. SPECIFIC PROBLEMS IN STATISTICAL EVALUATIONWe have seen in Chapter 5 that a given quantity (e.g., reaction rate) may beby several different estimators <strong>and</strong> methods. The majority of the production-ty<strong>Carlo</strong> programs offer a great number of estimators <strong>and</strong> methods for parallel deteof the quantity of interest. As a result of such calculations, the user obtains a set 01estimates which may be either correlated or independent. By repeating the Mccalculations several times, a number of independent sample sets are obtained, <strong>and</strong> thestimates are combined in such a way that the combined estimate is also unbiasethe smallest possible variance. (This is the case, for example, when the very samrate is estimated by several different estimators concurrently.) Usually, no a pr.mation on the statistics of the estimates is known, <strong>and</strong> therefore the combination aof the separate estimates are also determined from estimated data. If the numbependent results (sample sets) is large enough <strong>and</strong> their distribution is not veryGaussian (which is assumed in most practical cases), the combined mean <strong>and</strong> vaibe determined according to the classical weighted-average formulas as they folmaximum likelihood principles. 3 - 33 - 54The respective results are outlined in Sectithe other h<strong>and</strong>, if the number of sample sets is small, the classical weighted avt*anot give an unbiased estimate of the combined variance. A corrected variance ethe optimum combined mean 33,49is derived in Section B, on the assumption that thestimated samples are normally distributed.In simulating rare events (such as transmission of particles through thick Lnormality assumption certainly fails to hold, <strong>and</strong> only a. small fragment of theaccounts for the event investigated. An unbiased combination of rare sample setimation of the variance of the combined mean 49are discussed in Sections C aspectively.Estimation of quantities defined as ratios of two reactiosince, in practice, the ratio of two expectations is estimat, 4 n c iaii< 4 < , >, '
400 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationsvariables, all having the same expectation m. The r<strong>and</strong>om variables may be either correlated(which is the case with parallel estimation by several estimators) or independent (e.g., whencalculating a particular quantity in different schemes). If the realizations in a set are correlated,the set is called a correlated set; in the opposite case, the set is an independent set.(Note that since the samples are assumed to be Gaussian, uncorrelated sets are also independent.)The k-tuple of the sample is denoted by the sample vectorx = (X'", x (2) , ... x (k, ) T (6.201)(x is a column vector, T denotes transpose). The independent simulations result in a numberof sample vectors x,, x 2, . . . Note that independent sets do not necessarily contain thesame number of data elements, (e.g., because one or more data elements in the k-tuple werenot calculated in certain sets).Now let us assume that x in Equation (6.201) is normally distributed, let m be thecommon expectation of the components, <strong>and</strong> let S denote the covariance matrix of thecomponents. This property will be denoted asx : N(me,S)wheree = (1,1,...1)1 2 kThe density function of x then has the formf(x) = Kexp{-(x - met'Q(X - me)/2}whereQ = S-'K is a normalization factor <strong>and</strong>ka T b = 2i- !a (i) b (i)denotes the scalar product of the vectors a <strong>and</strong> b.Let us first consider correlated sets (in this case, the number of estimates in a set isalways k) <strong>and</strong> assume that we are given n independent realizations x,, x 2, . . . , X nof ther<strong>and</strong>om variable x. (For example, a realization may be the result of a history.) We seek aset of vectors c,, C 2, . . . , C nsuch that the combined estimateniis unbiased with respect to the common mean <strong>and</strong> has the lowest possible variance. Oneimmediately recognizes that the separate realizations are interchangeable (i.e., none of them
401plays a distinguished role), <strong>and</strong> therefore c scannot depend on j. Let us denote C 1-- c <strong>and</strong>let x be the empirical (or sample) mean of the realizations, i.e.,(6.202)Then the problem reduces to the determination of a vector c such thatifi = c T x (6.203)is unbiased with respect to m <strong>and</strong> its variance is minimum. If brackets denote expectation,we have(X 1) = (x) = me = (m,m,...m)'''I 2 k<strong>and</strong> therefore, from Equation (6.203), it is seen that (m) = m, i.e., the combined estimationis unbiased ifre = 1 (6.204)The variance of the combined estimate reads*D 2 InT] = (m 2 ) - rn 2 = (C 1 XX 1 C) - m 2= c T
402 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> CalculationsBefore discussing this result, we show that the maximum likelihood estimate of thecommon mean is identical to the optimum combination* in Equations (6.203) <strong>and</strong> (6.206).The logarithm of the likelihood function corresponding to n sample sets islogL = 2 logf(XJ)where f(x) is the normal density function of x given above. Differentiation of logL withrespect to the expectation m yields0 = — logL = — ~ y (x, - me) r Q(x, - me)/2 = n[e T Qx - me'Qejdm dm i ~ 'i.e.,Tn = e'Qx/e'Qe (6.208)in accordance with the expression in Equations (6.203) <strong>and</strong> (6.206).The main difficulty with the combined mean in Equation (6.208) is that the covariancematirx of the data is very seldom known exactly <strong>and</strong> therefore the coefficient vector c inEquation (6.206) cannot be determined. In practice, one can only use empirical valuesexpressed in terms of the realizations. It is reasonable to replace the covariance matrix S inEquation (6.206) with its empirical valuenS = 2 (XJ - X)(X 1- WKn - 1) (6.209)Thus, denotingQ = s-we can define a combination coefficient vector asc = Qe i-'Qe (6.210)<strong>and</strong> acceptm = c T x (6.211)as a quasi-optimum combined estimate of the mean. Two problems arise immediately. Thefirst follows from the fact that c is no longer independent of the sample values, <strong>and</strong> thereforeit is not certain that the combined mean is unbiased. Second, if the mean is unbiased, thenhow can we construct an unbiased estimate of its variance? The first problem is reassuringlysettled by the following classical theorem. 1* This is, in fact, a special case of the more general theorem which states that it there exists a minimum varianceestimate of a parameter, then the maximum likelihood estimate is that estimate.
403Theorem 6.7 — If x <strong>and</strong> s denote the respective sample mean <strong>and</strong> covariance of therealizations as defined in Equations (6.202) <strong>and</strong> (6.209), respectively, then % is normallydistributed with a mean me <strong>and</strong> covariance S/n, i.e.,x : N(me,S/n)<strong>and</strong> x is independent of S. Furthermore, the empirical covariance can be decomposed in theformN -1(n - DS = E y,y'i r - Awhere y ):N(0,S ) <strong>and</strong>are independent of y, (i ^ j).Now, since c in Equation (6.210) is expressed in terms of Q = Sthat c is independent of x, i.e.,', the theorem states(hi) = (C 1 X) = (c')(x) = m(c T e) =mas c ! e = 1. Accordingly, m in Equation (6.211) is an unbiased estimate of the commonmean m.As for the theoretical variance of m, by analogy to Equation (6.205), one shows thatD 2 Im] = are missing. Further assume that the component x (I)is distributed asx ( " : N(In 5Sj), i = 1, 2, k
404 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> CalculationsLet xfbe the j-th realization of x { " <strong>and</strong> let n, be the number of such realizations. By analogyto the notations used with correlated sets, we introduce the following quantities:V 22nA(6.214)<strong>and</strong>c'"' = V 2 n,/s, (6.215)where S 1is the theoretical variance of x l,) . The component \ {i>x readsof the empirical mean vector1y, x!"(6.216)while the empirical covariance matrix is diagonal with elementss, = 2 (xj" - ^"YKn, - 1)j = i(6.217)Repeating the derivation in the first part of this section, we find that the optimum unbiasedestimate of the common mean is againwhere c is the vector composed of the elements c (i)in Equation (6.215). The theoreticalvariance of hi is just V 2 in Equation (6.214). Again, if c 0 ) is estimated byc (i) = V 2 n,/s, (6.218)withV 22 nVs,then with the notation c = (c (1) , c 1 (i = 1, 2, . . . ,k), then V 2isa reliable measure of the variance of m. In the opposite case, a correction factor, to bederived in the next section, is applied.It should be emphasized that a quasi-optimum averaging of the n = , n 4independentsamples is possible only because we have the a priori information that the realizations xj 1 'of an x woriginate from a common normal density N(m,sJ (i = 1,2, . . . ,k). This knowledgemakes it possible to order the realizations into groups of various statistics (s,), the orderingin turn, results in a reduction of the (theoretical) variance of the combined mean. Without
this a priori information, the best thing one can do is to take the arithmetic mean of all ttsrealizations asIn this case, the variance of x is estimated ass = 2 - x) 2 /(n(n -1)]Since the optimum combination coefficients were derived by minimizing the variantof the combined mean, it is evident that D 2 Ix] S= D 2 Im], Nevertheless, it may be instiuctivto see the proof of this particular inequality in detail. The expectations of the empiric*,variance s (<strong>and</strong> thus the variance of x) readsD 2 JxI =
406 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationswe haveas stated. Note that the equality holds only if b,/a, is independent of i. i.e., if S 1= s forevery realization. This means that the variance of the optimum combined mean is lowerthan that of the arithmetic mean unless all the samples originate from the same distribution.B. UNBIASED ESTIMATION OF COMBINED VARIANCE FROM SMALLSAMPLE SETSIn this section, we investigate the bias introduced when the empirical value V 2definedin the previous section is used as an estimate of the variance of rh, the quasi-optimumcombined mean of separate sets. In the first part of this section, correlated sets are considered;extension to independent sets is given in the second part. First, we express V 2in terms ofthe theoretical values V 2 , S, <strong>and</strong> c. Next, the true variance D 2 [m] is given in the same terms,<strong>and</strong> comparison of the two expressions will give an estimate of the bias. Correcting V 2the aid of an estimate of the bias yields an estimate of the combined variance unbiased upto the order (kin) 2 .Let us write the empirical combination coefficients <strong>and</strong> covariance matrix of the correlatedsets as sums of the exact values <strong>and</strong> some unknown corrections, i.e., letwithc c ' 8<strong>and</strong>S = S +AThen it follows from Equation (6.213) that the empirical combined variance readsnV 2 = i-'Sc - c T Sc + 2(c T S8) + Ic 1 Ac) + 2(c T A8) + (S T S8) + (8 T A8)Taking into account that the empirical covariance matrix S is an unbiased estimate of thetheoretical one, i.e.,(A) = 0we have for the expectation of V 2the following expression(nV 2 ) = nV 2 + 2(c T S(8» + 2(c T A8) + (8 T S8) + (8 1 AS)where V 2is the theoretical optimum variance given in Equation (6.205). Similarly, exp<strong>and</strong>ingthe theoretical variance of rh in Equation (6.212), we havenD 2 [rh] = nV 2 + 2(c T S
40?Thus, the bias introduced into the estimate of the variance of m is(V 2 ) - D 2 [m\ = - [2(c T A8) +
408 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationswhere A is defined in Theorem 6.7. Inserting this relation into Equations (6.222) <strong>and</strong> (6.223),we obtain(V 2 ) - D 2 Jm] = 2V 2 [c T
409In view of Equation (6.226) <strong>and</strong> the above identities, the bias in Equation (6.224) reads(V 2 ) - D 2 (m] = 2V 2 (c T Sc)S P[QE - (e'Qe)]/(n - I) = ~2V 3 .k - I)I[R - UThus, the following theorem is established.Theorem 6.8 — An estimate of the variance of the combined mean, ifi, unbiased up tothe order V 2 (k/n) 2 , iss = V 2 [l 4 2(k - 1 )/(n - !)]where V 2is the empirical maximum likelihood estimate of the sample variance <strong>and</strong> is gi«;t>.in Equation (6.213).Accordingly, if k/n < 1, then the usual way of estimating the variance of the samplemean, as given in Equation (6.213), is suitable. On the other h<strong>and</strong>, if the number of samplesets is low, the correction in Equation (6.227) makes the estimate unbiased (provided k 2 /n7is negligible).The considerations above can be easily extended to independent sets. Then Equations(6.218) <strong>and</strong> (6.219) define the vector c <strong>and</strong> the variance V 2 , while the other quantities playinga role in the derivation becomeS = {8 ys,}; Q = {8Js 1}S = {8,S 1}; Q = {8Js 1}<strong>and</strong>A = {5Js 1-sj}Repeating the train of thought of the first part of this section, it is seen that the bias in thevariance estimation is(V 2 ) - D 2 fm] = 2V 2
410 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> CalculationsTherefore(A 1) = 0(A-7 = 2sf/(n, - 1)<strong>and</strong> the bias isk(V 2 ) - D 2 [m] = 2V 2 (2 c !l, (l - c
41.1This means that if we use the knowledge that the sample covariance matrix is diagonal, theestimated variance of the sample mean will be smaller than if we take into account the(usually nonzero) off-diagonal elements of the empirical covariance matrix.S.C. ESTIMATION OF A COMMON MEAN FMOM RARE SETSConsider a simulation procedure in which only rare but important events cothe score. Then the final score in a history is zero with a high probability annonzero value with a low probability. It is felt that mechanical use of the laistatistical formulas in Section A will very likely yield unreliable estimates of botl<strong>and</strong> the variance. This is so because the distribution of the scores is far from Gau v
412 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationsfor the variance. The maximum likelihood estimate of the common mean m follows fromEquation (6.229) by differentiation asrh = (e T Q,.x)/(e T Q re) (6.232)while that of the probability p isP = y/n (6.233)Let us denote byp. = m/Pthe expectation of the rare contributions. Then it follows from Theorem 6.7 that(1 = (e T Q,.x7(e T Q re) (6.234)with0, = Sr 1is a conditionally unbiased estimate of p, with v given, since the x,'s are Gaussian. Thereforern = pp, (6.235)is unconditionally unbiased with respect to m (as p is unbiased with respect to p). Thus, ifthe rarity of the events is realized during the estimation procedure <strong>and</strong> the conditional meanp. in Equation (6.234) <strong>and</strong> the probability p in Equation (6.233) are separately estimated,then m in Equation (6.235) is a reliable estimate of the common mean. On the other h<strong>and</strong>,if the sample statistics (empirical mean <strong>and</strong> variance) are generated with no regard to thepossible rarity, the situation is drastically different, the resulting estimates may be catastrophicallybiased. This is demonstrated below. Let us consider an estimation process wherethe sample statistics are produced from the entire sample sets. The empirical mean in thiscase isnz = E z / nj = l<strong>and</strong> the empirical covariance matrix readsnS = E (z, ~ Z)(Z 1z) T /(n - 1)J = IAgain letQ - s- 1
413Then the whole-sample <strong>and</strong> rare-sample statistics are related asz = vx/'n = Px (6.23d)<strong>and</strong>S = (v - I)Sy(O - 1) + qxx'Q,7 qxxTQ rx (6.239)Now, if rarity is not realized, the common mean is estimated by the maximum likuihoocestimate in Equations (6.210) <strong>and</strong> (6.211), i.e., it readsm* = (e T Qz)/(e T Qe) (6 240)The scalar products e-rQe, e T Qz, <strong>and</strong> ZTQZ can be expressed in terms of the rare statisticson the basis of Equation (6.239), <strong>and</strong> a little algebra yields the expression of the unbiasedestimate rh in Equation (6.235) in terms of the whole-sample statistics asm pp. " rm" (6.241)wheren(n — v)|zTQ'z - (e T Qz) 2 /(e r Qe)] (6,242)Obviously, the unbiased estimate m <strong>and</strong> the whole-sample estimate m* are different, <strong>and</strong>their ratio is the rarity factor r. It is shown 49 that the rarity factor can be expressed in termsof the rare statistics asr = 1 + (1 - p)(x - ejx) T Q r(x - e fl) + 0(l/n)Since Q ris positive, definite r is not less than unity <strong>and</strong> we have the following theorem.Theorem 6.10 — An unbiased estimate of the common mean of correlated rare sets ism in Equations (6.233) through (6.235) in terms of the rare statistics or in Equations (6.740'through (6.242) with the whole-sample statistics. The Gaussian, maximum likelihood estimatem* in Equation (6.240) underestimates (in modulus) the expectation, i.e.,(m) = m
414 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculations<strong>and</strong>|m| 5* |{m*>|•It can also be seen 49thatlim (r) = +oc (6.243)<strong>and</strong>lim p(r) = k/n (6.244)P->-0Accordinglylim m* = 0p-->0i.e., for very rare events (p 1), the Gaussian estimate m* predicts a practically zero valueof the nonzero common mean m. This bias is often aggravated by human error in thatoccasional <strong>and</strong> extremely high contributions among a great number of low ones (zeros inour case) are intentionally discarded as "r<strong>and</strong>om fluctuations". Both Theorem 6.10 <strong>and</strong> thepossibility of wrong subjective decisions suggest that whenever the occurrence of rare eventsis indicated, the obtained data should be checked thoroughly from the point of view of raritybefore statistical evaluation.In the case of independent rare sets, the number of realizations n ;as well as the numberof rare events V 1may be different for different r<strong>and</strong>om variables z'. Although in full generalitythe ''rarity probability" p may also be different for different variables, generalization of theconsiderations to such a case is troublesome. On the other h<strong>and</strong>, the assumption of a common"rarity probability" p is fairly realistic since in most practical cases the very same phenomenonis simulated independently by different methods <strong>and</strong> the different estimates (realizations)are combined.Let z U ) , z (2) ,...,z
41.5According to the results of Section A an unbiased estimate of the expectation of the rarecontributionsp. = m/pisk(1=2 (6,245.wherek£>" = (v,/s,_,.)/S (6.246)j =1<strong>and</strong>x (i) = X xf'/v,s, r= J (xf> - F>) 2 /(v, - 1)J= 1are the rare-sample statistics. It can be easily seen from the likelihood function of therealizations xj'> that the unbiased maximum likelihood estimate of the probability p iskki = ii = iTherefore, an unbiased estimate of the common mean in terms of the rare statistics readsm = P(I = (2 ",/¾ D 1) 2 cf/x® (6,,247)Again, this is a safe estimate if rarity is accounted for when generating the statistics. H,however, the whole-sample statisticsz (i! = 2zf ) / n i= v.x^Vn,<strong>and</strong>s, = 2 (zj" - z ,0 ) 2 (n, " Di=iare used, then the combination coefficients can be expressed asc'f- (r,n/s,)/X (lyi/Si)j=ik
416 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>; <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> CalculationswithV 1(V 1 1)H 1(H 1Hj(Il 1- v) (7. 0 ) 2 'D<strong>and</strong> therefore the unbiased estimate m reads2 '1,) 2 " (WS 1) 2 (1;,"/¾)instead of the maximum likelihood estimate corresponding to Equations (6.218) <strong>and</strong> (6.219).Comparison of the unbiased <strong>and</strong> maximum likelihood estimates leads to similar conclusions,as in the case of correlated rare sets, <strong>and</strong> will not be repeated here.D, ESTIMATION OF THE COMBINED VARIANCE OF RARE SETSFirst, we give an unbiased estimate of the variance of the estimated common mean interms of the rare sample statistics. Next, we show that if rarity is not realized <strong>and</strong> the whole -sample statistics are used for estimating the variance, then the estimate may be completelyunreliable. The considerations are first presented for correlated rare setsLet us denotec, = e T Q/e r Q reThen the unbiased estimate of the mean in Equations (6.234) <strong>and</strong> (6.235) readsm - PC nXHencerh — m = pc' r'(x - me/p) 4- m(p - p)/pwithP = v/nThe conditional variance of rh with v (the number of rare samples) given isD 2 lm|v] - p 2 D 2 [p>] + m 2 (p •- p) 2 /p 2whereD 2 [p>] = KE 1 1 Q 1*)]- 1Taking the expectation with respect to v, i.e., summing up with the binomial distributionof v, the unconditional variance becomesD 2 Im] = V ( 1 1 V(I - P)"-D 2 [m|v](6.248)- P - D 2 [p>] + m 2 (l - p)/(n,p)n
41?(Note that vD 2 [|i|v] is independent of v; that is why it can appear in the formula afteraveraging over v.) Now. the results in Section B concerning notirarc .-.els apply Ui thevariance of p.(since the rare samples themselves are assumed to be Gaussian), i.e., denotingV 2 = lv(e T Q re)l-'an unbiased estimate of the conditional variance D 2 J |i|id follows from Equation (6.227;^ V 2 Ii + 2(k - l)/(v - D]Since u, = mZp, the second term on the RHS of Equation (6.248) can be rewritten asnr(l - p)Z(np) = LI-'U - p)p/n (6.249)We have seen in the previous section that p. can be estimated according to Equations (6.2"¼ t.i.e.,u, 2 « p 2 = A 2 ZfD 2 (6,250¾To complete the derivation, we need an unbiased estimate of p(ishows that— p). Simple algebra(P(I - P))Z(n - 1) = P(I - P)Zn (6.23 J)i.e., np (1 - p)/(n - 1) is an estimate of p (1 - p). Accordingly, the second term on theRHS of Equation (6.248) is estimated asm 2 (l - p)Ztp(n - 1)1<strong>and</strong> we have the following theorem.Theorem 6.11 — An estimate unbiased up to the order (k/np) Jof the rare-sampkvarianceof the common sample mean rh in the case of correlated rare events isS r= m 2 (l - p)/[p(n - 1)] + p 2 V 2 [i + 2(k - !)/(*> - !)] (6.257)Naturally, if p = 1 (i.e., if v = n), Equation (6.252) goes over to Equatihowever, p is considerably less than unity, Equation (6.252) defines an estimate i, hi -from that in Equation (6.227). This will be shown below. The (corrected] Gainlikelihood estimate of the variance of m* (i.e., of the whole-sample combii" 1i t •-.iEquation (6.240) would readS* = In(CrQe)I- 1 Il + 2(k - l)Z(n - 1)]Simple but lengthy algebra shows 49thatIe 1 QeI1== p[e T Q,.e]1+ m=(l - p)/(pnwhere r is the rarity factor defined in Equation (6.242).
418 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> CalculationsThus, an estimate of the whole-sample variance becomess* = fm-( 1 - p)/(pnr) + p 2 V 2 ][l + 2(k D/(n 1)1 (6.253)Obviously, this estimate differs from the correct one in Equation (6.252) in the appearanceof the rarity factor r in the first term. (The difference in the correction factors is negligiblein this case.) Now. according to Equations (6.243) <strong>and</strong> (6.244)Um s,whilelim s* = m 2 /kp H)i.e., for small p. the whole-sample estimate s* differs drastically from the unbiased raresampleestimate s,. <strong>and</strong> gives completely unreliable under estimations of the combined variance.In the case of independent rare sets, the procedure is similar to that above, except thatthe estimate of p. = m/p is the one given in Equations (6.245) <strong>and</strong> (6.246). i.e.,M -- ic:"x
419withkOn the other h<strong>and</strong>, § is an unbiased estimate of the conditional variance D 2 [ ijj v,,.,., >>,. j,<strong>and</strong> it can also be seen thatPd p)/n (p(l - p)/(n - 1))Therefore, theestimates r= rh 2 (l - p)/[p(n 1)] -I- D 2 SfX (6,255)is unconditionally unbiased with respect to the variance of the estimated common mean fhin Equation (6.247). An estimate of the probability p is<strong>and</strong> Sj 1is defined in Equation (6.254). A discussion similar to that in the case of correlatedrare sets can also be given here with identical conclusions.The main consequence of the considerations regarding rare sets is that whenever thedanger of occurence of rare but important contributions is real, care must be taken todistinguish between important rare events <strong>and</strong> unimportant background, <strong>and</strong> the rare-samplestatistics are to be applied in the combined estimation.E. ESTIMATION OF RATIO OF EXPECTATIONSA problem of frequent occurrence in physical reactor <strong>Monte</strong> <strong>Carlo</strong> applications is theunbiased estimation of the ratio of two reaction rate-type quantities. This is the case, forexample, in the estimation of the effective multiplication factor (Chapter 6.Ill) <strong>and</strong> alsowhen peaking factors or moderator-to-core flux ratios are calculated. The difficulty of suchestimations is that the expectation of the ratio of two r<strong>and</strong>om variables (such as empiricalmeans that estimate the respective reaction rates) does not equal, in general, the ratio oftheir expectations. Correction for this bias is presented below.Let the ratio to be determined be of the formr ----- m 2/m (6.256)where m, <strong>and</strong> m 2are expectations of the r<strong>and</strong>om variables x <strong>and</strong> y, respectively:0 < m, = (x), 0 < m 2=
420 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculations<strong>and</strong>y = ; ~ 2 y,nIn the derivations below, we shall assume that the variables are indeed simple arithmeticaverages, although generalization to more general types of sample means (e.g., such asthose introduced in Section A) is straightforward.Letf = y/x (6.257)f is a most reasonable but usually biased estimate of r in Equations (6.256) <strong>and</strong> (6.257).Now, let f(x,y) be the probability density function of the r<strong>and</strong>om variables x <strong>and</strong> y. If thesevariables are sample means from a sufficiently large number of realizations (i.e., if n » 1),then (except for unusually extreme distributions) according to the central limit theorem, thedensity function f(x,y) is dominantly concentrated on a small domain:A = jxe [m, — a,,ITi 1+a,]; y € [m 2-a 2,rn 2+ a :J}; 0 < a, < m ((6.258)f(x,y) = 0 if (x,y) I A (6.259)Note that this assumption is essential because if arbitrary values of x (including zero) wereallowed, then the expectation of y/x would diverge. Although this divergence may, inprinciple, occur, for sufficiently large samples, the probability of its occurrence is negligible.A simplified analytical example will demonstrate the nature of this assumption at the endof this section.The expectation of the estimated ratio in Equation (6.257) is(r) = J jixj
421Thus, the expected ratio reads
422 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculations<strong>and</strong>(6.267)Proof.haveTaking the expectation of f <strong>and</strong> repeating the derivation of Equation (6.260), we(r) = — (m,y - m 2m,x — m,m,/x — m,\2[1 + 5,7(Xy) + s,,/x 2 ])O 1^ (1 - (y ^ m2)(* - m,) /x - m+ + O 3m, m 7m, V m, m 7m, mtm 2m,V 1 2- (S 1 2) V? - (S 1 1)m,m.O 3It remains to show that the terms in square brackets reduce to unity. Let us calculate theexpectation of the empirical covariance in Equation (6.266):n — I n 1H i , n - 1 n , n ini1- V,whereV 1 2= the covariance of the i-th realizations. (Naturally, it is independent of i since the realizationsare identically distributed.) On the other h<strong>and</strong>, the covariance of the sample means isV ,2= (A S x, 2 y.) -MIII 2 = (4 E x,y, + ~~ 22 x,y,>n j j Ii i iin(n - 1)m,m 9---- - V,i.e.(S 1 2) = V 1Similarly, it can be seen that
423St follows from Equations (6.265) through (6.267) that the correction to y/x declike 1/n, i.e., for a sufficiently large number of averaged realizations in x <strong>and</strong> y, thin the estimate f becomes negligible.Having obtained an unbiased estimate of the ratio, it is natural to ahof its variance. We shall first determine the theoretical variance of f, thiof it in terms of the sample statistics. Since the density function of x <strong>and</strong> \ , , ibe concentrated in a small region around the expectations, terms of the order'AI 1 "•)(k & OSare small compared to the second-order quantities <strong>and</strong> therefore terms proportional to fourth<strong>and</strong> higher relative central moments will be neglected.Let us first notice that the variance of the corrected empirical estimate f in Equator(6.265) differs negligibly from that of f in Equation (6.264). IndeedD 2 I?] =
424 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> CalculationswhereT =
425Wc start from the observation that, except for very degen. i ue i'< it- >u .>function of the sample mean x is a rapidly decreasing ot,« I
426 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> CalculationsF. ON THE DETERMINATION OF THEORETICAL VARIANCESIn the majority of estimation problems, expectations of r<strong>and</strong>om variables are to beestimated from realizations of the r<strong>and</strong>om variable, <strong>and</strong> the sample variance (variance ofthe estimated mean) calculated concurrently is only used as a measure of the reliability ofthe actual estimate. In certain applications, however, estimation of the theoretical varianceof the r<strong>and</strong>om variable generated is also of interest. This is the case, for example, whendifferent schemes are compared from the point of view of their efficiencies or variances. Aspecial question of variance estimation is addressed in this section.Given N independent realizations x,, x 2,...,x Nof a r<strong>and</strong>om variable x. Let m denotethe expectation of x, i.e.,(x) = (X 1) = m (i = 1, 2, N)Normally, the realizations are the results of independent histories, <strong>and</strong> all realizations haveidentical roles in estimating the quantity of interest. In many production codes, the historiesare grouped into "batches" of equal size <strong>and</strong> the evaluation of the estimated quantity isperformed using batch-averaged sample statistics.Batchwise evaluation is used in practice because, with sufficiently large batches, theresults will be approximately normally distributed <strong>and</strong> the corresponding confidence limitsare easily obtained. Thus, when estimating the expectation of the realizations, empiricalvariance is calculated in order to give a qualitative indication of the reliability of the estimate.The reliability of the estimated variance is of secondary importance in this case. The situationis different if the variance itself is the quantity to be estimated, <strong>and</strong> this question is investigatedbelow.Let us assume that the N realizations are grouped into n batches <strong>and</strong> the sample meanis estimated in every batch. Then the average1 "! V V.. Z JA( J - DN +(6.276)is calculated in the j-th batch, <strong>and</strong> the final estimate of the mean, is1 k _where k = N/n, the number of batches formed from N histories. The rh/s are obviouslyindependent <strong>and</strong>(m) = (m) - mirrespective of k or n. The sample variance of m is estimated askV' - V (m. - m) 2 /[k(k - 1)], (k > 1) (6.277)j=i(cf. Section A). First, we show that the estimate in Equation (6.277) is unbiased for anygrouping of the histories, i.e., its expectation is independent of the size of the batches. Theexpectation of the sample variance in Equation (6.277) reads
427Nowi'6.77K)kj„,<strong>and</strong> therefore(V 2 ) = -kjfBy analogy to the derivation of Equation (6.278J. we have from Equation (6.276) that = - (x 2 ) + - - m 2 = - D 2 Ix] + irr (6.279)n n n<strong>and</strong> therefore(V 2 ) = [(x 2 ) - m 2 ] = ~ D 2 Ix]knNirrespective of the number n of histories in a batch. We have thus demonstrated that V 2inEquation (6.277) is an unbiased estimate of 1/N times the theoretical variance of x. Therefore,denotingS 1= (mj - ha) 2 , J= 1,2, k, (2«k«N)k — 1Sj represents a sample in the estimation of D 2 [x]. The corresponding sample mean is.1ks = r S Sj (6.280)k j_i<strong>and</strong>(s> = D 2 [x]It is, however, not necessarily true any more that for a given number of histories, thereliability of the variance estimate in Equation (6.280) is independent of the number ofbatches (or, equivalently, of the number of histories in a batch). Therefore, if the varianceof x is the quantity to be estimated, then the scheme resulting in the lowest variance of theestimated variance is to be applied. The most reliable estimate is defined in the followingtheorem.Theorem 6.14 — The variance of the sample variance is minimum if every batchcontains a single history, i.e., if n = 1 <strong>and</strong> k = N.Proof. The variance of the estimate s in Equation (6.280) is
N2 f f i ? )428 Mome <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> CalculationsThe optimum value of n = N/k with N given is the one that minimizes the quantityQ(n)N 2(k - 1) : Lkfr S m ~ m) 2 ) (6.281)In the rest of the proof, we shall assume that the expectation of the r<strong>and</strong>om variable x iszero, i.e., we put m = 0. This can be done without loss of generality since, if the assumptiondoes not hold, by putting X 1— m in place of x,, all the formulas so far derived remain valid<strong>and</strong> the new variable has zero expectation. This assumption also means that
42*3Similarly, for the fourth moment05t> = < - 2 0 > = -^< 2*M- 2 2 ^ 1Vn , / n 4 V, , i ;i (2 + 22 2 xfxf) - 'r (x 4 > +Inserting the above expressions into Equation (6.284), the quantity to be minimized becomeQ(n)N(x 4 ) + (N ~ 2 - n + — — W > ?\ N — n/(6.285)where we have inserted k — N/n. Obviously, Q(n) is minimum with n = 1, i.e., if evervbatch consists of a single history, as stated.We have thus shown that when estimating the theoretical variance of a r<strong>and</strong>om variable(e.g., of the final score in a history) from the realizations X 1(i - 1, 2,...,N) the mostefficient estimate isN1s = ~ 2 (x, - m) 2 (6,286)as follows from Equation (6.280) with k = N. In other words, for variance estimation,batchwise evaluation is not efficient.In the proof above, we have also established the variance of the sample variance s. Notethat the derivation was performed for a zero-expectation r<strong>and</strong>om variable, i.e., in the genera!case, x -- m is to be inserted instead of x <strong>and</strong> the variance of s in Equation (6.286) isD 2 [S] = Q(I) ~ D 4 [x] = -J-K(X - m) 4 ) - D 2 Ix]] + - 7 - - - - 7 : D 2 [x] (6.287,N N(N — 1)The efficiency of batchwise variance estimation was examined by Dubi. 12the statement of Theorem 6.14 for the estimateHe provesNI ,s = 7; 2 (x, ^ m) 2N<strong>and</strong> shows thatD 2 [s] - -J- |((x - m) 4 ) - D 4 [x]] (6.288)NComparing Equations (6.287) <strong>and</strong> (6.288), it is seen that the variance of the estimatedvariance is lower by D 4[x]/[N(N - 1)] if the expectation of the r<strong>and</strong>om variable x is known<strong>and</strong> need not be estimated by m.
430 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> CalculationsAPPENDIX 6A:UNBIASED ESTIMATION OF CRH ICALITY REACTION RATESA scheme of estimating reaction rates in source-free systems (hypothetically altered tocritical by k t,,J was introduced on a heuristic basis in Section 6.III.F. Here we prove thatthis scheme does, indeed, define an unbiased estimate of the reaction rateR = JdrJ dr 0f(r)Z(r,rJS(r 0)(A.!)where S(r,) is the spatial density of fission neutrons in the hypothetical system (in whichthe number of fission neutrons per collision has been changed to l/k efltimes the real one),f(r ()) is an arbitrary weighting function, <strong>and</strong> Z(r,r') is the density of the fission neturons atr due to a single fission at r . According to Equations (6.103) <strong>and</strong> (6.100)Z(r,r (>) - jdEc f(P)v(P)z(P,rJ (A.2)where P = (r,E), <strong>and</strong> Z(Px 1,) satisfies the equationz(P,r„) = JdP"z(P",r 0)K s(P",P) + |dE o X(PJT(P 0,P)(A.3)Here, P„ = (r 0,E„),X(Po) ~X(EJrJthe direction-energy distribution of the fission neutrons emerging at r , <strong>and</strong> K 5(F',P) is thenumber density of the neutrons entering a collision at P due to a neutron colliding at P" ina game where fissions are replaced by pure absorption (nonmultiplying game), i.e.,K 8(PJP) =J dP'cJP") CJPJPJ T(PJP)Now. let us define the function4>(P) = J dr 0z(P,r 0)S(r 0)(A.4)Then, from Equations (A.l) <strong>and</strong> (A.2). the reaction rate in question can be expressed asR = j dr J dEc f(I>(P)f(r) jdr„z(P,r„)S(rJ- fdPi(i(P)c f(P)v(P)f(r) •- JdPiKP)g(P) (A.5)withg(P) - cJP)v(P)f(r) (A. 6)
43 sOn the other h<strong>and</strong>, multiplying Equation (A.3) by Sir.,) <strong>and</strong> integrating with respect to swe obtain an equation on the function 1 IdP) defined in Equation (.44) as4»(P) = ) dP"u>(P")K s(P",P) 4- jdP'Q(P')T(P',P) (AWhereQ(P) - X(P)S(F)Equation (A. 1) defines 43(P) as the collision density in the i . . u'r-i 1 >the source Q(P). Therefore, Equation (A.5) can be interpr i d .•, i >r,x r irate produced by this collision density. Accordingly, an tirthe reaction rate R in Equation (A.5) goes along the lines det;are started from Q(P). They are processed until they escape fioi.i r n^ •, r i m i >(recall that fission is also treated as absorption). In the simple, .nu, •n >, ,collision contributes to the estimate of R by c,(P)y(P)f(r) mu'o^L U 1 . t! > .of the particle entering the collision. Alternatively, fissiomrel,
432 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> CalculationswhereA = S y.y,<strong>and</strong> VJ-N(O 1S) independently of y m(m ^ j). AccordinglyD 3 = (AQ)V(n - I) 3 - 3(AQ)7(n - I) 2 + 3AQ/(n - 1 ) - 1 (B.3)Let us denoteB 1= VjvTQ(B.4)then!1 - 1AQ = 2 B 1(B.5)<strong>and</strong> the following relations hold(AQ) 2 = V B 2 + VVB j B kJJk(AQ) 3 = S Bf + 2 2 (BjBk + BfBJ + 2 2 2 B 1BkB 1111 j k j k mjV-kj*k.m.n>*kSince the Bs are identically distributed <strong>and</strong> independent of each other, we have{AQ) = (n - I)(B) = (n - I)I((AQ) 2 ) = (n - I)(B 2 ) + (n - l)(n - 2)1<strong>and</strong>((AQ) 3 ) = (n - I)(B 2 ) + 3(n - l)(n - 2)(B 2 ) + (n - l)(n - 2)(n - 3)1whereB = yy r Q(B.6)<strong>and</strong> y:N(0,S). Inserting the above expectations into the expectation of Equation (B.3), wehave(D 3 ) = — — . T ; ((B 3 ) - 3
43.¾This will be proven in the lemma below, <strong>and</strong> thus we have(D ( ) = 0(k-)I/(n - If = OCkVn-)!as stated.Lemma
434 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>; <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculations<strong>and</strong> Equation (B.7) becomesG = X---
435ThenT.m = EJ.Iy.y.Rjeyiy,,,<strong>and</strong> since y is normally distributed, 1we have = S 13S 1,,, + S 11S 11n+ s, n!s,S 1J being the (ij)-th element of S. Accordingly(T 1111) = 2 S 13(R 11+ R 11)S,,,, + S 11n2 S 11R,.iijiwhich calls forth Equation (C.4).APPENDIX 61):EMPIRICAL THIRD MOMENTSLet us consider three correlated r<strong>and</strong>om variables u,v, <strong>and</strong> w. We can assume withoutloss of generality that the variables all have zero expectations, i.e.,(u) = (v) = (w) = 0Let U 1, Vj, <strong>and</strong> W 1( i = 1, 2 n) be independent realizations of the respective variables<strong>and</strong> let the empirical means of the realizations be1 " 1 n I -\ii -- E ",- v = - VV ;, w =• - 2 w, (D !n i=i n 1 =i ni =.We wish to construct an unbiased estimate of the third momentT = (uvw)(D.2)Theorem — The estimateT = E (u, - u)(v, - v)(w, - w)/[n(n - l)(n - 2)] (D.3); •= iis unbiased with respect to T in Equation (D.2).Proof.It is to be seen that(T) =TTaking the expectation of Equation (D.3), we haveit(T) = [n(n — l)(n — 2)] " l S ( u . v i w .. ~ U 1V 1W — U 1VW 1- Uv 1W;i = i+ u.vw + uv,w + uvw, — uvw) (L).4)
436 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> transport <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> CalculationsSince the different realizations are independent <strong>and</strong> all have zero expectation, the followingrelations bold.(U 1V 1W) = - ^ (U 1V 1W ) = - (U 1V 1W 1) •I (U 1V 1) T
6. Brown. F. B. <strong>and</strong> Martin, W. R., <strong>Monte</strong> <strong>Carlo</strong> methods for radiation transport analysis on vectorcomputers, Prog. Nuci. Energy, 14, 269. 1984.7. Cashwell, C D. <strong>and</strong> Schr<strong>and</strong>t, R. G., Flux at a point in MCNP, in A Review of theApplication of <strong>Monte</strong> <strong>Carlo</strong> <strong>Methods</strong>. Proc. Seminar-Workshop, ORNL/RSiC-44 Report, Oa r? u itional Laboratory, 1980, 63.8. Dejonghe, G., et al., Studies of perturbations using correlated <strong>Monte</strong> <strong>Carlo</strong> method, in A RTheory <strong>and</strong> Application of <strong>Monte</strong> <strong>Carlo</strong> <strong>Methods</strong>. Proc. Seminar-Workshop, ORNL/RSIC-44Ridge National Laboratory, 1980, 47; see also, Etude de Perturbations Utilisant Ia Methode de !in Proc. NEACRP Specialists' Meeting on Nuclear Data <strong>and</strong> Benchmarks for Shielding, OL' P - kParis, 1980, 191.9. Dickenson, D. <strong>and</strong> Whitesides, G. E., The <strong>Monte</strong> <strong>Carlo</strong> method for array cnticahty calcul • OPTechnol., 30, 166, 1976.10. Drawbaugh, D. W., On the solution of transport problems by conditional <strong>Monte</strong> <strong>Carlo</strong>, Nut9, 195, 1961.11. Dubi, A., et al., <strong>Monte</strong> <strong>Carlo</strong> aspects of contributons, Nuci. Sci. Eng., 68. 19, 1978.12. Dubi, A., On the analysis of the variance in <strong>Monte</strong> <strong>Carlo</strong> calculations, Nuci. Sci. Eng., 72, 108. 1979.13. Dubi, A., <strong>and</strong> Gerstl, S. A. W., Application of biasing techniques to the contributor) <strong>Monte</strong> <strong>Carlo</strong> method,Nuci. Sci. Eng., 76, 198, 1980.14. Dubi, A. <strong>and</strong> Rief, H., A note on some aspects of sensitivity analysis in <strong>Monte</strong> <strong>Carlo</strong>, in Proc. NEACKPSpecialists' Meeting on Nuclear Data <strong>and</strong> Benchmarks for Shielding, OECD Report, Paris, 1980, 15!.15. Dubi, A., et al., On confidence limits <strong>and</strong> statistical convergence of <strong>Monte</strong> <strong>Carlo</strong> point-flux estimatorswith unbounded variance, Ann. Nuci. Energy, 9, 675, 1982.16. Elperin, T. <strong>and</strong> Dubi, A., On the Markov chain analysis of source iteration <strong>Monte</strong> <strong>Carlo</strong> procedures forcriticality problems. I, Nuci. Sci. Eng., 91, 59, 1985.17. Ermakov, S. M. <strong>and</strong> Mikhailov, G. A., Course of Statistical Modelling, Nauka, Moscow, 1976, iinRussian).18. Feller, W., An Introduction to Probability Theory <strong>and</strong> its Applications, Vol. 3, 2nd ed., John Wiley .%Sons, New York, 1971.19. I eld man. U., et al., <strong>Monte</strong> <strong>Carlo</strong> small-sample perturbation calculations, in Proc. Topical Meeting onAdvances in Reactor Comp., Salt Lake City, 1983, 124.20. Frank-Kamenietzky, A. D., Application of <strong>Monte</strong> <strong>Carlo</strong> method to multigroup reactor calculations, At.Energ., 16, 119, 1964, (in Russian).21. Frank-Kamenietzky, A. D., Calculation of multiplication factor of nuclear reactors by <strong>Monte</strong> <strong>Carlo</strong> method,in <strong>Monte</strong> <strong>Carlo</strong> Method in Radiation <strong>Transport</strong> Problems, Atomiz.dat, Moscow, 1967, 212, (in Russian).22. Fraley, S. K. <strong>and</strong> Hoffman, T. J., Bounded flux-at-a-point for <strong>Monte</strong> <strong>Carlo</strong>, Trans. Am. Nuci. Soc, 23,371, 1977.23. Fraley, S. K. <strong>and</strong> Hoffman, T. .1.. Bounded flux-at-a-point for multigroup <strong>Monte</strong> <strong>Carlo</strong> computer codes,Nuci. Sci. Eng., 70, 14, 1979.24. Gast, R. C. <strong>and</strong> C<strong>and</strong>elore, N. R., <strong>Monte</strong> <strong>Carlo</strong> eigenfunction uncertainties, Trans. Am. Nuci. Soc, 14,219, 1971.25. Gast, R. C. <strong>and</strong> C<strong>and</strong>elore, N. R., <strong>Monte</strong> <strong>Carlo</strong> eigenfunction strategies <strong>and</strong> uncertainties, in Proc.NEACRP Meeting of a <strong>Monte</strong> <strong>Carlo</strong> Study Group, ANL-75-2/NEAC-CRP-L 118 Report, Argonne NationalLaboratory, 1974, 162.26. Gerstl., S. A,, A New Concept for Deep-Penetration <strong>Transport</strong> Calculations <strong>and</strong> Two New Forms of the<strong>Neutron</strong> <strong>Transport</strong> Equation, LA-6628-MS Report, Los Alamos Scientific Laboratory, 1976.27. Gelbard, E. M. <strong>and</strong> Prael, R. E., <strong>Monte</strong> <strong>Carlo</strong> Work at Argonne National Laboratory. FRA-TM-64Memo, 1974.28. Gelbard, E. M., Unfinished <strong>Monte</strong> <strong>Carlo</strong> business, in Proc. Int. Topical Meeting on Advances in Mathematical<strong>Methods</strong> for the Solution of Nuclear Engineering Problems, Munich, 1981. 145.29. Goad, W. <strong>and</strong> Johnston, R., <strong>Monte</strong> <strong>Carlo</strong>r method for criticality problems, Nuci. Sci. Eng., 5, 37i, 1959.30. Goldstein, M. <strong>and</strong> Greenspan, E., A recursive <strong>Monte</strong> <strong>Carlo</strong> method for estimating importance functiondistributions in deep penetration problems, Nuci. Sci. Eng.. 76, 308, 1980.31. Hall, M. C. G., <strong>Monte</strong> <strong>Carlo</strong> perturbation theory in neutron transport calculations, in Proc. SeminarWorkshop, ORNL/RSIC-44 Report, Oak Ridge National Laboratory, 1980, 47; see also, DUCKPOND -a perturbation <strong>Monte</strong> <strong>Carlo</strong> <strong>and</strong> its applications in Proc. NEACRP Specialists' Meeting on Nuclear Data<strong>and</strong> Benchmarks for Shielding, OECD Report, Paris, 1980, 205.32. Hall, M. C. G., Cross-section adjustment with <strong>Monte</strong> <strong>Carlo</strong> sensitivities. Application to the Winfrith ironbenchmark, Nuci. Sci. Eng., 81, 423, 1982.33. Halperin, M., Almost linearly-optimum combination of unbiased estimates, J. Am. Stat. Assoc., 56, 36,1961.34. Hoffman, T. .1., et al., The adjoint difference method <strong>and</strong> its application to deep-penetration radiationtransport, Nuci. Sci. Eng., 48, 179, 1972.
438 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculations35. HntTinaii. T. j., et a!,, A <strong>Monte</strong> <strong>Carlo</strong> perturbation source method for reactivity calculations, Nucl. Sci.Eng.. 66, 60, 1978.36. Iida, H. <strong>and</strong> Seki, Y., Reduction of computational time for point detector estimation in <strong>Monte</strong> <strong>Carlo</strong>transport codes. Nucl. Sci. Eng., 74, 213, 1980.37. Kalos, M. H., On the estimation of flux at a point by <strong>Monte</strong> <strong>Carlo</strong>, Nucl. Sci. Eng., 16, 11!, 1963.38. Kalos, M. H,, Zero variance estimator for reactor criticality, in Proc. Nat. Topical Meeting on NewDevelopments in Reactor Physics <strong>and</strong> Shielding, Vol. 1, CONF-720901, U.S. Atomic Energy CommissionTechnical Information Center. 1972, 229.Kalli, H. J. <strong>and</strong> Cashwell, E. D., Evaluation of Three <strong>Monte</strong> <strong>Carlo</strong> Estimation Schemes for Flux at aPoint, LA-6865-MS Report, Los Alamos Scientific Laboratory, 1977.Kalli, II. J. <strong>and</strong> Cashwell, E. D., Evaluation of three <strong>Monte</strong> <strong>Carlo</strong> schemes for flux at a point, Trans.Am. Nucl. Sac, 27, 370, 1977.Khairullin, R. K., On a <strong>Monte</strong> <strong>Carlo</strong> algorithm for calculation of critical systems, Izv. Vuzov Scr. Mat.,10, 130, 1977 (in Russian).Khairullin, R. K., On the estimation of critical parameters of a class of branching processes, Izv. VuzovSer. Mat., 8, 78, 1980 (in Russian).LASL Group X-6, MCNP — A General <strong>Monte</strong> <strong>Carlo</strong> Code for <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> <strong>Transport</strong>, LA-7369-M Report, Los Alamos Scientific Laboratory, 1979.Lewins, J. <strong>and</strong> Becker, M., Eds., Sensitivity <strong>and</strong> uncertainty analysis of reactor performance parameters,in Advances in Nuclear Science Technology, Vol. 14, Plenum Press, New York, 1982.Levitt, L. B. <strong>and</strong> Lewis, R. C, A Non-Multi-Group <strong>Monte</strong> <strong>Carlo</strong> Code for Analysis of Fast CriticalAssemblies, Al-AEC-12951 Report, Atomics International, 1970.Lieberoth, J., A <strong>Monte</strong> <strong>Carlo</strong> technique to solve the static eigenvalue problem of the Boltzmann transportequation, Nukleonik, 11, 213, 1968.Lichtenstein, H., et ah, Progress in the Development of a Reactivity Capability in the SAM-CE Systemfor Validating Fuel Management Codes, EPRI NP-638 Report, Electric Power Research Institute, 1978.Lux, I., Generalized <strong>Monte</strong> <strong>Carlo</strong> moment equations with application to correlated <strong>and</strong> differential games.Int. J. Sci. Eng., 1(2), 1984.Lux, I. <strong>and</strong> S/atmary, '/.., Combined estimation of a common mean from few sample sets <strong>and</strong> from samplesets of rare events, Nucl. Sci. Eng., 89, 137, 1985.Matthes, W., Calculation of reactivity perturbations with the <strong>Monte</strong> <strong>Carlo</strong> method, Nucl. Sci. Eng., 47,234, 1972.Matthes, W., Simulation of <strong>Transport</strong> Equation with <strong>Monte</strong> <strong>Carlo</strong>, EUR 5347e Report, Joint NuclearResearch Centre, Ispra Establishment, 1975.Matthes, W. K., Comments on perturbation <strong>Monte</strong> <strong>Carlo</strong>, ESlS News!., 36, 9, 1981.MacMillan, D. B., <strong>Monte</strong> <strong>Carlo</strong> confidence limits for iterated-source calculations, Nucl. Sci. Eng., 50,73, 1973.Martin, B. R., Statistics for Physicists, Academic Press, New York, 1971.Mendelson, M. R., <strong>Monte</strong> <strong>Carlo</strong> criticality calculations for thermal reactors, Nucl. Sci. Eng., 32, 319,1968.Mikhailov, G, A., Calculation of critical systems by <strong>Monte</strong> <strong>Carlo</strong> method, Zh. Vychisl. Mat. Mat. Eiz.,6, 71, 1966 (in Russian).Mikhailov, G. A., Calculation of system-parameter derivatives of functionals of the solutions to the transportequation, Zh. Vychisl. Mat. Mat. Eiz., 7, 915, 1967 (in Russian).Mikhailov, G. A., Modification of local particle-flux estimation by <strong>Monte</strong> <strong>Carlo</strong>, Zh. Vychisl. Mat. Mat.Eiz., 13, 574, 1973 (in Russian).Miller, L. B,, <strong>Monte</strong> <strong>Carlo</strong> Analysis of Reactivity Coefficients in Fast Reactors, General Theory <strong>and</strong>Applications, ANL-7307 (TID-4500) Report, Argonne National Laboratory, 1967.Moore, J. G., The solution of criticality problems by <strong>Monte</strong> <strong>Carlo</strong> methods, Adv. Nucl. Sci. Technol., 9,,73, 1976.Nakagawa, M, <strong>and</strong> Asaoka, T., Improvement of correlated sampling <strong>Monte</strong> <strong>Carlo</strong> methods for reactivitycalculations, J. Nucl. Sci. Technol., 15, 400, 1978.Noack, K., Variance analysis of <strong>Monte</strong> <strong>Carlo</strong> perturbation source method in inhomogeneous linear particletransport problems, Kernenergie, 26, 227, 282, 1983.Polevoi, V. B., Calculation of large reactivity perturbations by difference-iteration <strong>Monte</strong> <strong>Carlo</strong> method,At. Energ., 46, 20, 1979 (in Russian).Preeg, W. E. <strong>and</strong> Tsang, J. S. K., Comparison of correlated <strong>Monte</strong> <strong>Carlo</strong> techniques, Trans. Am. Nucl.Soc, 43, 628, 1982.Rief, H. <strong>and</strong> Kschwendl, H., Reactor analysis by <strong>Monte</strong> <strong>Carlo</strong>, Nucl. Sci. Eng., 30, 395, 1967.Rief, H., The relation correlated tracking <strong>and</strong> differential perturbation algorithms, £575 Newsl., 36, 5,1981.
67. Rief, H. <strong>and</strong> Fioretti, A., <strong>Monte</strong> <strong>Carlo</strong> shielding analysis using deep penetration biasing schemes combiwith point estimators <strong>and</strong> algorithms lor the scoring of sensitivity profiles <strong>and</strong> finite perturbation :-f;7in Proc. 6th ICRS, Vol. 1, Tokyo, 1983, 199.68. Rief, H., Generalized <strong>Monte</strong> <strong>Carlo</strong> perturbation algorithms for correlated sampling <strong>and</strong> a second oTaylor series approach, Ann. Nucl. Energy, 11, 455, !984.69. Rief, H., et al., Track length estimator applied to point detector, Nucl. Sri. Eng., 87, 59, 1984.70. Rief, H., <strong>Monte</strong> <strong>Carlo</strong> uncertainty analysis, in CRC H<strong>and</strong>book on Uncertainty Analysis, Y. Ro.nen, 1CRC Press, Boca Raton, FL, in press.71. Sarkar, P. K. <strong>and</strong> Prasad, M. A., Estimation of population variance in comributon <strong>Monte</strong> <strong>Carlo</strong>. Nt.ScL Eng., 87. 136, 1984.72. Shikov, S. B., Selected problems in mathematical theory of ciitical ieaeiors.. Zn. Vychisl. Mai Mm.7, !13, 1967 (in Russian).73. Shikov, S. B. <strong>and</strong> Shishkov, L. K., On the existence <strong>and</strong> uniqueness Oi a positive solution to » enreactorequation, Zh. Vychisl. Mat. Mat. Fi?.., 8, 686, !968, (in Russian)74. Smith, K. S. <strong>and</strong> Schaefer, R. W,, Recent developments in the small-sample reactivity discrepancy, AsSa. Eng., 87, 314, 1984.75. Spanier, J. <strong>and</strong> Gelbard, E. M., <strong>Monte</strong> <strong>Carlo</strong> Principles <strong>and</strong> <strong>Neutron</strong> <strong>Transport</strong> Problems, AddisWesley, Reading, MA, 1969.76. Steinberg, H. A. <strong>and</strong> Kalos, M. H., Bounded estimators for flux at a point in <strong>Monte</strong> <strong>Carlo</strong>, NwT .Eng., 44, 406. 1971.77. Steinberg, H. <strong>and</strong> Lichteinstein, H., implementation of bounded point estimators in point .•.-,OSs-SeC;<strong>Monte</strong> <strong>Carlo</strong>, Trans. Am. Nucl. Soc., 17, 259, 1973.78. Steinberg, H. A., Bounded estimation of flux -at-a-point for one or more detectors, in Proc NEACMeeting of a <strong>Monte</strong> <strong>Carlo</strong> Study Group. ANL-75-2, NEA-CRP-L- i! 8. Argonnc National Laboratory, ! 9281.79. Steinberg, H., implementation of improved bounded estimation of flux-at-a-point for several detect;.Trans. Am. Nucl. Soc, 19, 442, 1974.80. Steinberg, H., Bounded estimation of flux-at-a-point near region boundaries, Trans. Am. Nucl. Soc.,607, !976.81. Takahashi, H., <strong>Monte</strong> <strong>Carlo</strong> method for geometrical perturbation <strong>and</strong> its application to the pulsedreactor, Nucl. Sci. Eng., 41, 259, 1970.82. Usikov, D. A., Parametric Integration as a Means of <strong>Monte</strong> <strong>Carlo</strong> Calculation of Finite Perturbation.Reactors, FE1-423 Report, Fiziko-Energeticheskij Institute, Obninsk. 1976, (in Russian).83. Usikov, D. A., On the Variance of Perturbation-Estimation by <strong>Monte</strong> <strong>Carlo</strong> Method, FEJ-656 Sep,Fiziko-Energeticheskij institute, Obninsk, 1976 (in Russian).84. Usikov, D. A., Perturbation estimation by solution of inhomogeneous neutron transport problems via Mc<strong>Carlo</strong> method, At. Energ., 42, 19, 1977 (in Russian).85. Ussachoff, J. N., Equations for the importance of neutrons, reactor kinetics <strong>and</strong> the theory of perturbatt.in Proc. Int. Conf, Peaceful Uses of Atomic Energy, Vol. 5, P/656, Geneva, !955, 503.86. Zolotukhin, V. G. <strong>and</strong> Usikov, D. A,, Estimation of Reactor Parameters fay <strong>Monte</strong> <strong>Carlo</strong> Method ilturbation Theory), Atomizdat, Moscow, 1979 (in Russian).87. Zolotukhin, V. G. <strong>and</strong> Maiorov, L. V., Estimation of systematic error in <strong>Monte</strong> <strong>Carlo</strong> cnticatityculations, At. Energ., 55, 173, 1983 (in Russian).88. Zolotukhin, V. G. <strong>and</strong> Maiorov, L, V., Estimation of Critical Reactor Parameters by <strong>Monte</strong> <strong>Carlo</strong> McSh .Energoatomizdat, Moscow, 1984 (in Russian).
441Chapter 7OPTIMIZATION OF EFFICIENCY-INCREASING TECHNi
442 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationsparameters of the scheme to be optimized <strong>and</strong> select the parameter value resulting in thehighest efficiency in the preliminary runs (experimental-statistical approach). This methodis usually very time-consuming <strong>and</strong> if one wishes to determine statistically reliable parametervalues, the computing time required may be even higher than that for determining the targetquantity in a nonoptimized scheme. Therefore, it is more expedient to investigate the efficiencyof the technique in question in simplified transport models or through an approximatesolution of the exact problem. Usually, this can be done analytically (approximate analyticalapproach). Yet, except for the simplest problems, it is difficult to predict how far theapproximate optimum parameters are from the exact ones. 'Therefore, results of approximateanalytical calculations are often only of qualitative merit; they reflect specific features ofthe optimized schemes.A combination of experimental <strong>and</strong> analytical methods is expected to yield reasonablywell-optimized parameters of the techniques. The idea is as follows. The estimation problemis solved analytically in some approximate model, but certain quantities characteristic of theexact model are left undetermined. These quantities (called "bulk parameters") are independentof the particular nonanalog scheme used in the simulation, but characterize thesystem <strong>and</strong> the physical process modeled. The optimum parameters of the efficiency-increasingscheme are expressed in terms of the bulk parameters, which are determined inshort preliminary runs. The quasi-optimum parameters of the scheme are than used inproduction runs <strong>and</strong> are possibly refined during the calculation. This method is called thedirect statistical approach 9Naturally, any scheme that results in zero variance is optimum, <strong>and</strong> its efficiency isequal to infinity. We have seen that no zero-variance scheme is feasible in practice; nevertheless,approximations to zero-variance schemes may result in efficient estimation procedures.In this optimization method, certain parameters of the kernels are chosen so that thekernels give approximately zero variance in simplified (but realistic) games. The kernels sooptimized are then applied in the actual simulation.In this Chapter, we consider the optimization of techniques widely used in deep-penetration<strong>Monte</strong> <strong>Carlo</strong> calculations. Simple examples of optimization by approximate analytical<strong>and</strong> direct statistical approaches are given in Chapter 7.1. The more sophisticated optimizationprocedures of splitting <strong>and</strong> path stretching are detailed in Chapters 7.11 <strong>and</strong> 7. Ill, respectively.For the sake of completeness, we note that efficiency maximization in a broader sensealso comprises the minimum variance combination of different estimators of the same quantity.This matter was addressed in Chapter 6. V <strong>and</strong> is different in nature from the problemsdiscussed in this Chapter.I. SIMPLE EXAMPLES OF OPTIMIZATION METHODSOptimization of splitting <strong>and</strong> path stretching in the straight-ahead scattering model isinvestigated in Sections A <strong>and</strong> B. The separation assumption proposed in Section 5.VII.Bis used in an approximate analytical optimization of Russian roulette in Section C. Theresults of the considerations are very approximate <strong>and</strong> the numerical results so obtained havelittle direct practical value. Nevertheless, they reflect the main characteristics of the optimumschemes. More realistic models based on direct statistical approach are given in Section D.In later Sections, it will be apparent how the approximate analytical results help in theunderst<strong>and</strong>ing <strong>and</strong> construction of practically applicable optimized schemes.A. OPTIMUM SPLITTING SCHEMES IN THE STRAIGHT-AHEAD MODELLet us consider the problem of particle transmission through matter. Specifically, letthe particles enter perpendicularly the x = 0 face of a homogeneous nonmultiplying slabsituated perpendicularly to the x axis between x = 0 <strong>and</strong> x = X. Let the quantity to be
443estimated be the number of particles emerging from the sh 1 * 'it *• - V W- sj-"H — n '1" -problem with the straight-ahead scattering model introdi >;<strong>and</strong> zero otherwise, while the collision kerne! reduces toC(P',P")dP" = c8(u/ -I)d|x'inside the slab <strong>and</strong> zero outside it (vacuum-equivalent J* >i=>i i ' "assumed), c is the mean number of secondaries per colli.i' nd i tcangle between the x axis <strong>and</strong> the flight direction of the PAIthe slab is nonmultiplying, c < I.The contribution function in transmission estimation ieadsf(P,P') = f(x,x') = 1 if x' > X<strong>and</strong> zero otherwise, i.e., the particle scores unity only when it escapes. The first momentof the score (expected number of particles due to a starter at x) satisfies Equation (5.57),With the kernels of the straight-ahead model, the equation reduces toM,(x) = J dx'e- ( x '" x ' + c I dx'e-" 1 -*>M,(x')The solution of this equation follows from Appendix 5C asM,(x) = expf-(l - c)(X - x)| (7.2;Hence, the expected number of transmitted particles due to a particle entering the siab at x= 0 isM 1(O) = e- ( 1 - c , xIn what follows, we investigate the two forms of splitting introduced in Sections 5.III.D<strong>and</strong> 5.IV.B.In the case of collisionwi.se splitting, the second moment of the score follows fromEquation (5.98). Let us consider a splitting procedure where every particle is split into nfragments in every collision. Then the splitting probability <strong>and</strong> post splitting 'weight introducedin Section 5.III.D becomez m(P,W) = 8 m,„; W ( | ) n= 1/nTherefore, the average weight values appearing in Equation (5.98) readW',' = 1, W 2' = 1/nWe seek an n value that minimizes the quality factor of the game. IfD 2 (x) = M 2(x) -M 1(X)
444 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationsdenotes the variance of the score due to a starter from x, then Equation (5.98) with thestraight-ahead scattering kernels becomesD 2 (x) = e- ( X - x ' - M 2 (x) + c F dx'e «' °M((x) + - | dx'e" < x '- s ) D 2 (x')Jx n Jxc f x= I(x) + - dx'e- , V l ) D 2 (x') (7.3)n AIf we insert the expression of M 1(x) in Equation (7.2) into the source term of Equation (7.3).we obtain!(x) = [ e-
445<strong>and</strong> on the optical thickness X. Analytical minimization of Equation (7.7) is cumbersomebut it can be easily minimized by simply calculating Q(n) at successive integer values of itIn Table 7.1, optimum splitting ratios are given for selected values of c <strong>and</strong> X.TABLE 7.1CX 0.1 0.2 0.3 0.4 0.5 0.62.5 1 1 1 1 1 [3.0 2 1 1 1 1 14.0 2 2 2 1 1 15.0 2 2 2 1 1 110 3 ? 2 2 2 115 3 3 2 2 2 120 4 3 2 ? 230 4 3 3 2 2 240 5 3 3 2 2 250 5 4 3 3 2 2The numerical results obtained from the mode! are certainly not realistic; however, theyreflect the main tendencies expected from more rigorous models. Thus, it is seen that theoptimum number of split fragments per collision increases with increasing absorption (decreasingc) <strong>and</strong> also with increasing thickness of the slab. It is also observed that the optimumsplitting ratio varies very slowly as the thickness of the slab is increased <strong>and</strong> therefore thereal optimum is very likely a noninteger value of n. In other words, collisionwise splittingcan only be changed in rough steps <strong>and</strong> does not seem to be a sufficiently fine tool ofefficiency maximization. (One could object that a noninteger splitting ratio can also berealized by allowing for two possible outcomes of every splitting with appropriate probabilites. It can, however, be seen that even in this case, collisionwise splitting is less flexible<strong>and</strong> efficient than geometrical splitting.)Geometrical (or surface) splitting can also be optimized analytically in the straightaheadmodel. Let us consider again the transmission of particles through a slab of thicknessX in which the mean number of secondaries per collision is equal to c. Analytical treatment,of the problem is especially simple in purely absorbing media. Efficiency of surface splittingin this case was investigated in Reference 15. However, in most practical cases, optimizationof splitting is related to deep-penetration calculations with mild absorption <strong>and</strong> thereforeresults from a purely absorbing model are not very enlightening. The straight-ahead scatteringmodel offers a simple tool for investigating the geometrical splitting procedure.Let a splitting surface be situated at x = x», i.e., assume that a particle is split into nfragments whenever it crosses this surface. With the notations of Section 5.IV.B, this meansthat the only nonvanishing splitting probability is g n(x) <strong>and</strong> it is nonzero at x = x, only:§k.n if x = x.0 otherwiseFurthermore, the weights of the split fragments areW (l)„ = 1/n, (i = 1,2, n)
446 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculations<strong>and</strong> the weight values appearing in the second-moment Equation (5.117) becomeW 1= g n(x.) 2 I/" = 1<strong>and</strong>W 2= g„(x.) 2 1/n 2 = 1/nat x = x.. The second-moment equation (5.117) with these values readsM 2(x) = c dx'e-«' ^M 2(X') + e" 1 -"-JXXJ[M 2 (x.) + - D 2 (x..)] (7.8)nfor x < x, <strong>and</strong>M 2(x.) = M,(x.) = e- ( | - c » x - *"> (7.9)where M 1(X,) is the escape rate of a particle started from x = x,, as follows from Equation(7.2). D 2 (x) in Equation (7.8) is the variance of the score due to a starter from x. ThusD 2 (x.) = M 2(X,) - M 2 (x.) = e- (I -|T - e-' 1 -^""] — W
447The variance of the escape rate due to a starter from x = 0 isD 2 (0) = Ae" ( 1 - C , ( x * x) - e~ 2 < l ~ c , x = e >'l , x[Ae" - C,(X x " - e M « x jInserting the expression of A into Equation (7.12), we haveD 2 (0) =e"- c , x {e " ^*--->[l - c-*-]+Ij; _eo .»*nThe variance can be expressed in terms of the expected score in Equation (744) asD 2 (0) = M 1(O)(M 1(X.)]! - M 1(X ~xf)l + -{! - M 1(X.)]} (7.7';nThe expected number of collisions due to a starter is the sum of two terms. The rir.itterm is the collision rate produced by the starter between x = 0 <strong>and</strong> x = x,. The secondterm is the rate produced by the progeny between x = x« <strong>and</strong> x ~ X, provided the starterreaches the surfaces at x*. The collision rates above follow by analogy to Equation (5.237)in Section 5.VI.C, <strong>and</strong> thus the number of collisions becomesN(O) = - 1 — [1 - e" (, ~ c>x, J + e" 0 c' "" —-— Il - e" , , ~ c * x -'">|1 - c 1 - c "it can also be expressed in terms of the first moment asN(O) = ——{[1 - M 1(X - x,)] + HiVl 1(X -x.)M - M 1(X,)]} (7.14)1 — cIn order to optimize the splitting ratio, n, again the quality factorQ(n) =D 2 (0)N(0)needs to be minimized. According to Equations (7.13) <strong>and</strong> (7.14) the quality factor readsQ(n) - --^M 1(O)(M 1(Xf)[I - M 1(X - x,)] + - [1 - M 1(X,)]}1 — c nx {[1 - M 1(X -xJJ + nM,(X -xj[l - M.fxJ]}or, after rearrangementQ(n) - M 1(O)(M 1(Xj[I - M 1(X - x,)] 2 + M 1(X - xj| 1 - M 1(X,)] 21 — c+- + nM,(X - XjM 1(X,)n[1 - M 1(X - xj[[l - M 1(Xj]} (7.15)Differentiating Q(n) with respect to n <strong>and</strong> setting the derivative equal to zero, we have= |-- 2+ M 1(X - x.)M,(x,)l [1 M 1(X - x.)][l - M 1(X.)] = 0dn n 2 1 — c
448 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> CalculationsHence, the optimum value of the splitting ratio isn„ pt= [M 1(X - X 1)M 1 (X.)]" 2 = [e-c-^-e-* 1 -^-*'>]~ 1 , 2=e( 1- c ) X ' 2 = [M 1(O)]-" 2 (7.16)Accordingly, in this simple model, the optimum number of split fragments is independentof the location of the splitting surface. More realistic simulations indicate that for reasonablesplitting surface locations (i.e., not too close to x = 0 or x = X), the optimum splittingratio is, indeed, position independent. 21This, however, does not mean that the gain inefficiency obtained by the splitting procedure would also be independent of x«. The optimizedquality factor follows from Equation (7.15) with n = n oplasQ(n„ pl) = - M 1(OMVM 1(XO[I - M 1(X - x.)] + VM 1(X - x,)[l - M,(x.)]} 21 - cNow, sinceVM 1(X,) = M,(X./2)it is easily seen that Q(n opl) is minimum if x, = X/2, i.e., if the splitting surface is at themidplaneof the slab. The absolute minimum of the quality factor isQ m i n= - - — M 1(O)M 1(X^)[I - M,(XJ2)] 21 — cNote that since the straight-ahead model does not account for backscattering, the resultsabove are expected to be approximate. Realistic tests show that the optimum location of thesplitting surface is at a value x. > X/2, but not very far from the midplane, <strong>and</strong> x„ - X/2is a rather good approximation. 21Another interesting feature of the splitting procedure is that the number of fragmentsstarting from the splitting surface at x. = X/2 ise-"-^' 2 -n„ p t= 1(Remember that the expected number of particles reaching x = X/2 isexp[ —(1 — c)X/2].) Therefore, single-surface splitting virtually cuts the effective thicknessof the slab about in half. Furthermore, it follows from the model that by inserting more <strong>and</strong>more splitting surfaces into the slab, the optimum splitting procedure results in an essentiallyuniform distribution of the fragments along the slab.It may be interesting to examine the sensitivity of the efficiency (or of the quality factor)to the variation of the splitting ratio, n, in the nieghborhood of its optimum value. For thesake of simplicity, we shall consider the case when the splitting surface is located atx. = X/2. The sensitivity of Q(n) is its relative variation due to small alterations of n, i.e.,if S(n) denotes the sensitivity of Q(n), then1 dQ(n)Q(n)dn
449In view of Equation (7.15) <strong>and</strong> (7.16), the sensitivity readsS(n)1 ItVM 1(O) - 1 1n- n„ p,p-n nVM 1(O) + 1 nn + n optwhere M 1(O) is the expected transmission rate through the slab. In most deep-penetrationproblems, the transmission rate is very small, i.e.,M 1(O) « 1Then for a game with no splitting (n = 1), obviously S(I) ~ — 1, i.e., the efficiency isvery sensitive to the variation of the splitting ratio. Now, if a value n = n opt(1 + a) isapplied instead of the optimum value, thenS(n) = - T- ~ - - - - - - := VM,(0)a/[(l + a)(2 + a)]n op,(l + a)(2 + a)It is seen that for not-too-large values of a, the dominant term in S(n) is M 1(O) <strong>and</strong> thesensitivity is negligible: S(n)
450 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationsflights of the particles longer in the preferred direction. Let the total cross section of theslab (unity in our case) be altered aso- = a - b = 1 - b (7.18)where b is called the path-stretching parameter. Furthermore, let survival biasing be appliedat every collision, i.e., let a possible absorption be replaced by multiplication of the particleweight by c at every collision.Note that the transition kernel T(P,P') introduced in Section A is normalized over thewhole half-space x 0, i.e., in the derivation below we implicitly assume that the slab tobe traversed is a part of a semiinfinite homogeneous medium. Although this assumption hasno effect whatsoever on the expected score in the straight-ahead model, it affects the secondmoment of the score if path stretching is applied. This is so because distortion of those partsof the flights that fall behind x = X is irrelevant from the point of view of the score, butinfluences the weights of the particles that are to leave the slab. To demonstrate the differences,the considerations below will be repeated for a bare slab in the second part of thissection. Accordingly, the analog transition kernel is againT(P,P')dP' = e- ( x 'x,dx', for x' > x<strong>and</strong> the nonanalog transition kernel becomesT(P,P')dP' = (1 - b)e- ( , - b ) < x '- x ) for x' > x (7.19)The survival-biased nonanalog collision kernel isC(P',P")dP" = 8((x' -l)d(x'Therefore, a particle that starts from x with a weight W will have a weightW= WT(P,P')/t(P,P') = —-—e1 — bh"x' (7.20)when it enters its next collision at x' (cf. Section 5.V.B) <strong>and</strong> it will leave the collision witha weightW" = c W (7.21)The weight-generation rules above ensure that the expected score (leakage rate) due to astarter in the path-stretched game is the same as in the analog game, i.e., it is equal to M 1in Equation (7.2). The second moment of the score follows from Equation (5.58) with theweights in Equation (7.20) <strong>and</strong> (7.21). Thus, the second moment of the leakage score dueto a unit-weight starter from x satisfies the equationM 2(X) = J[dx'(l - b)e-»-»>^--»(-^-y + [ dx'(l - b)e-
451The solution of this equation goes along the lines of Appendix 5C <strong>and</strong> results mM 2(X) = (1 - b 2 )-'exp[-(l + b - 7"3T 3)(X - x)]Hence, the second moment of the estimated leakage rate clue to a starter from x -•- fi isM 2(O) = (1 - b 2 )~'exp[-(l + b - -p—g)x] (7.22;An equation describing the expected number of collisions suffered by a particle that startsfrom x follows from Equation (5.192) asN(x) = 1 + | dx'(l - b)e- ( | - b X l - x, N(x')This equation has the solutionN(x) = (1 - b)(X - x)Thus, the number of collisions due to a starter from x = 0 isN(O) = (1 - b)X (7.231Equations (7.22) <strong>and</strong> (7.23) reflect a number of peculiarities of the path-stretching procedure.First, the number of collisions decreases with increasing biasing, a phenomenon not typicalto other common biasing techniques, like splitting or survival biasing. Next, it is also atypicalthat the second moment (<strong>and</strong> also the variance) is not a monotonic function of the biasingparameter, but, rather, has a minimum as a function of the path-stretching parameter b. inother words, the variance <strong>and</strong> the number of collisions do not antagonize, unlike most ofthe biasing schemes (cf. Section 5.VIIEI). Finally, the number of collisions is a linearfunction of b, whereas the second moment exhibits drastic variations <strong>and</strong> tends to infinityas b tends to 1. The singular feature of the variance warns against ill-considered use of pathstretching. Too high values of b may yield seemingly reliable estimates that are, in fact,considerably lower than the expected value. This phenomenon, also observed in practice,is a typical result of rare events (cf. Section 6.V.C). In our case, short flights represent therare events. Indeed, the density function in Equation (7.19) overemphasizes long flights ifb is near unity, while, according to Equation (7.20), the weights of particles taking part inthese flights become small. These small contributions will make up the great majority ofthe score, while particles that obtain high weights in short flights because of the factor (I— b)" 1 in Equation (7.20) will show up very seldom. The danger of misleading results ofunproper biasing was realized at an early stage of the examination of path stretching 30 .In light of the abovementioned peculiarities of the path-stretching procedure, it seemsadvisable to minimize the variance of the score rather than to maximize the efficiency ofthe game. In other words, it is safer to strive for the most reliable estimate (at the expenseof some extra computing time) than to establish the theoretically most efficient scheme withthe practical hazard of an undetectable bias. The safety of this strategy is guaranteed by thefact that the parameter defining a variance minimum is certainly lower than the one leadingto maximum efficiency, since the number of collisions per history decreases with increasingb.
452 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> CalculationsThe minimum-variance parameter follows from Equation (7.22) after differentiation withrespect to b, <strong>and</strong> it satisfies the equationdM 2(0) _ f2bdb b) 2 X ^M 2(O) = 0i.e.,2b(l - b) - (1 - b) 2 + c 2 = 0 (7.24)X(I - b)Now, since 0 =£ b =¾ 1 <strong>and</strong> X >>1 (deep-penetration problems), we denotee = [X(I + b)] 1<strong>and</strong> terms of the order e 2 will be neglected. Treating e as a known quantity, Equation (7.24)can be solved <strong>and</strong> the physically meaningful solution (i.e., the one that is less than unity)isb = [(1 + e) - cVl + 2e]/(l + 2e) + 0(e 2 )This solution can be further simplified asb = [1+ e - c(l 4- e)](l - 2e) + CXe. 2 )orb = (1 - c)(l - e) 4- ()(€•) (7.25)withe = [X(2 - c)]" 1 (7.26)Let us emphasize here, too, that the numerical results obtained from the simplified modelof straight-ahead scattering are necessarily unrealistic; nevertheless, they possess importantproperties characteristic of practically reasonable values. Three of the qualitatively characteristicfeatures of the optimized procedure are discussed below. First. Equation (7.25)<strong>and</strong> (7.26) reflect that the minimum-variance, path-stretching parameter depends essentiallyon the survival probability c <strong>and</strong> only slightly on the distance to escape, as also observedin realistic cases by Levitt 30 <strong>and</strong> Karcher et al. 22 A second interesting property of the optimumpath-stretching procedure manifests itself in the exponentially transformed formalism of thegame. We have shown in Sections 5.V.D <strong>and</strong> E that path stretching <strong>and</strong> exponential transformationare essentially equivalent. The practical difference between the two games is thefollowing, in path stretching, the transition kernel is biased <strong>and</strong> the weight of the particleis modified in every flight according to the ratio of the analog <strong>and</strong> stretched transitionkernels. In turn, when exponential transformation is applied, the game is governed bytransformed transition <strong>and</strong> collision kernels, the statistical weights of the particles are notaltered, <strong>and</strong> only the final scores are multiplied by appropriate weight factors. Let us nowexamine the transmission rate in the exponentially transformed game that is equivalent tothe minimum-variance, path-stretching procedure. Comparison of Equations (7.18) <strong>and</strong> (5.198)shows that in the straight-ahead model, the biasing function b(x) of the exponential trans-
453formation can be chosen asb(x) = b • (X - x)where b is the optimum path-stretching parameter. Hence, the expected transmissionin the transformed game follows from Equation (5.164) asrateH 1(X) = e b ( X - x ) M,(x) (7.27)The corresponding transformed first-moment equation readsM 1(X) = I dx'(l -- b)e-"-"> xThe quality factor of the game follows by using the expected number of collisions in Equation(7.23) asQ = [M 2(O) - M?(0)]N(0) = e- 2 , ! - c ) X [(l - b 2 )" 1 - I](I - b)X1 + bOn the other h<strong>and</strong>, it was shown in Section A that there is a lower bound of the quality
454 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationsfactor of a game with geometrical splitting, <strong>and</strong> this bound is given in Equation (7.17). Theratio of the two factors isQsp llt/Q Pa ths= X(I + b)(l - c)/b 2 « X(2 - c)/(l - c) + O(l)The ratio is considerably larger than unity if X >> 1 <strong>and</strong>/or if c = 1. Thus, our approximatemodel suggests that path stretching is expected to be more efficient than splitting in deeppenetrationproblems.Let us now consider the same problem as above, but assume that the slab between x= 0 <strong>and</strong> x = X is embedded in a (vacuum-equivalent) black absorber. Let the absorber beinfinitely strong, i.e., assume that any particle that reaches x = X is absorbed there. Thenthe analog transition kernel has the formT(pp')dP' = J E ~"'~'° D X 'L FX' ^ X1' ' te- ( X X ) S(X - x')dx' if x' > XSimilarly, let the path-stretched transition kernel beTYPP'VtP' = I ( 1 " b)e- (I ~ b > ( *'-*>dx' if x' < X1' ' te~ ( 1 - b ) < x - x ) S(X - x')dx' if x' > XThen the particle's weight is multiplied byT(P,P')/f(P,P') = j (1 - tfT'e-** - x ) if x' < Xe-b(X-x) if x' > Xin a flight from x to x', instead of the factor in Equation (7.20). It is easily seen that thesecond-moment equations corresponding to the kernels above has the formM 2(x) = e- < 1 + b K X " x ) + c 2 (l - b)-> I dx'e- < 1 + b ) < x '- x ) M 2(x')The solution of the equation at x = 0 isM 2(O) = exp - (1 + b -1 - b7The path-stretching parameter minimizing the second moment is easily obtained asb = 1 -ci.e., the optimum second moment isM 2(O) = e~- 2(1 ~ c)X = Mj(O)Thus, the optimum scheme has a zero variance. 8 Zero-variance schemes of a general pathstretchinggame will be derived in Chapter 7.III. The scheme above is a special case of ageneral method. This will become clear in light of the general results in Chapter 7.Ill if onerealizes that the optimum path-stretching parameter, b, satisifes the equatione-b(x-*)= M i( x )
455or, equivalently, the stretched cross section in Equation (7.18) can be written asd"
456 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationsweight in the kn'th collision <strong>and</strong> has lost weight during the last j — 1 survival biasing).Therefore, the score in a history consisting of i collisions isn - 1 j - 1s, = k ^ c' + ^ C = [1 - C + k(l - c n )]/(l - c) (7.33)r = o r =- oThe expected score in the history isBy inserting Equations (7.29) through (7.33) into this expression, we obtainP 1 - (cP)" PM 1= — = — (7.34)11 - cP, 1 - CP£ 1 - cP cNote that M 1in Equation (7.34) is identical to that in Equation (5.253), which was obtainedby direct application of the separation assumption. The second moment of the score isCC CC JjM, - 2 q,s? - X X a kb :[l - C + k(l - c")] 2 /(l - c) 2i = 1 k = o j = 1An elementary calculation yieldsP c(l + cP c) 1 ~ cP c1 - (c 2 P c) nM= ^ -i- i C 135)2(1 - cP c) 2 1 - c 2 P c1 - (cP c) n vn =Recall that in an analog game, Russian roulette is played in every collision, i.e.,1. Thus, the second moment of the analog score isM 2= P c(l 4- cP c)/(l - cP c) 2 (7.36)as also derived at the end of Section 5. VIII.G. In order to determine the efficiency of thegame, it remains to calculate the expected number of collisions per history. ObviouslyN" ; S = r^F RR-,^( 7- 3 7 )in the game with Russian roulette, while it reduces toN = M 1= P c/(1 - cP c)in the case of the analog game. Now the quality factor of the game with Russian roulettereadsQ = (M 2- M 2 )N = M 2M,[G n(c,cP c) - H(c,P3)]/G n(c,P c)whereG n(x,y)1 - y 1 - (xy) n1 - xy 1
457<strong>and</strong>H(x,y) = y/(l + xy)The quality factor in the analog game isQ = (M 2- M 2 )N = M 2M 1[I - H(c,P7)[Obviously, the Russian roulette procedure increases the efficiency ifS(n) = Q/Q < 1i.e., ifS(n) = [G„(c,cP c) - H(c,P c)]/{G n(c,P c)[l - H(c,P c)]} < 1 (7.38)The ratio S(n) was evaluated 34 - 35for various values of the first-flight collision probabilityP <strong>and</strong> survival probability c, <strong>and</strong> it was found that for not-too-large regions (P c< 0.6), theincrease of efficiency offered by Russian roulette does not exceed 5%. This means that forregions with characteristic dimensions less that about 1 to 2 mean free paths, Russianroulette does not pay off. It has also been seen that for such regions, the efficiency is verysensitive to the value of n (i.e., to the number of collisions before Russian roulette), whichis connected to the Russian roulette parameter according to Equation (7.28). Therefore,there is a risk that with an improper choice of the parameter, the efficiency is decreasedeven in cases where an optimum parameter would guarantee a moderate increase. Furthermore,in medium-sized bodies, Russian roulette is not efficient in heavy absorbers <strong>and</strong>,again, the efficiency varies quite drastically with the variation of the survival probabilityThe calculations show that survival biasing with Russian roulette may result in a considerableefficiency increase in large bodies (Pc> 0.8) <strong>and</strong> especially for not-too-strong absorbers(c > 0.4). In these cases, the efficiency is a slowly varying function of the Russian rouletteparameter. 34In Table 7.2, the calculated efficiency ratio S(n) in Equation (7.38) is comparedto numerical experimental values. The latter were obtained from a <strong>Monte</strong> <strong>Carlo</strong> simulationof the collision rate in a sphere of optical radius 3.61 (P c= 0.8). The calculations <strong>and</strong>experiments were carried out for selected values of the survival probability c <strong>and</strong> numberof collisions n before Russian roulette. The Russian roulette parameter is deduced from thesequantities according to the relationw th=c nTABLE 7.2C0.3 0.5 0.7 9.911 S(n) Exp li S(n) Exp n S(n) Exp n S(n) Exp2 0.90 0.90 2 0.86 0.83 3 0.83 0,85 6 0.88 0.853 0.98 0.99 3 0.82 0.80 5 0.79 0.78 Ii 0.85 0.824 1.12 1.15 4 0.84 0.81 7 0.8! 0.80 17 0.85 0.82There is a rule of thumb well known by practitioners for choosing the Russian rouletteparameter. According to this popular wisdom, w th= 0.1 is a reasonable choice. Theapproximate results above seem to corroborate this guess in the sense that the optimum
458 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationsnumbers in Table 7.2 yield the parameter values 0.09, 0.125, <strong>and</strong> 0.168 for survival probabilities0.3, 0.5, <strong>and</strong> 0.7, respectively. For c = 0.9, the value of w thmay vary between0.12 <strong>and</strong> 0.31 (corresponding to n - 19 <strong>and</strong> n = 11, respectively) without considerablechange of the efficiency.Nevertheless, it should be emphasized here, too, that the above results should be consideredmore as illustrations of an optimization method than as a definite recipe for determiningthe Russian roulette parameter. It has also been seen in the simplified example abovethat, in certain cases, the efficiency of a game with Russian roulette is very sensitive to thechoice of the parameter. This may be even more the case in more complicated problems.Competent practitioners say 26about the Russian roulette parameter that "It is very problemdependent <strong>and</strong> its setting is an art." A systematic study of this common <strong>Monte</strong> <strong>Carlo</strong> toolis very much needed, <strong>and</strong> such a study may lead to surprising results, astonishing even forold practitioners.I). OPTIMIZATION BY DIRECT STATISTICAL APPROACHThe approximate analytical optimization models so far investigated in this Chapter wereseen to reflect certain characteristic properties of a real simulation <strong>and</strong> provided us withuseful qualitative information on the efficiency-increasing schemes considered. Nevertheless,these models are so oversimplified that the quantitative results they produce may not beconsidered realistic.The loss of information caused by the application of simplified models can be compensatedfor to some extent by the application of parameters determined from numerical experiments.In the introduction, this procedure was called the direct statistical approach. Inthis section, we illustrate the method in two simple cases; more elaborate models will begiven in subsequent Chapters.Let us first consider the optimization of a single-surface geometrical splitting procedureby the direct statistical approach. Assume that particles are started from a "source region"<strong>and</strong> we wish to estimate the number of particles that reach a "detector region". For thesake of simplicity, we suppose that the two regions have no common part <strong>and</strong> there existsa surface that completely separates the two regions in such a way that any particle that startsfrom the source region <strong>and</strong> reaches the detector region must cross the surface. We define asplitting procedure in which a particle is split into n fragments when it crosses the surfacefor the first time, but no repeated splitting is played in case of a second or further crossing.Optimization of the procedure consists of selecting an n value that maximizes the efficiencyof the game. The efficiency will be formulated in terms of "average probabilities" whichdescribe a "typical particle" <strong>and</strong> which will then be defined through experimental values.Let p, be the probability that a typical source particle reaches the splitting surface <strong>and</strong>let p 2be the probability that a typical fragment starting from the splitting surface reachesthe detector region. Let W 1denote the average weight of a unit-weight starter when it reachesthe splitting surface <strong>and</strong> W 2denote the average weight of a fragment in the detector regionif its weight was unity at the splitting surface. Then the quantity to be estimated can beexpressed asR -- P 1P 2W 1W 2(7.39)Now, in an n-for-one splitting, the probability that k out of the n fragments of a starterreaches the detector region after a splitting isQ K= P,©PL(I ~ P 2R K<strong>and</strong> since the average weight of a fragment is w,/n, its average weight in the detector region
459is w 2w,/n, <strong>and</strong> the expected score isM 1= /I k - w,q k= P 1W 1W 2P 2= Rk„i ni.e., the procedure is unbiased. The variance of the score due to a unit-weight starter IS" wD 2 = 2J ( k W 2) 2 Qk " (P 1W 1W 2P 2) 2k=i n= p,w 2 w 2 2p 2(l - p 2)/n+ P 1(I - P 1)W 2 W 2 P 2i.e.D 2 + (1 ~~ P 1)P 2 (7.40)withA = PiP 2W 2 W 2In order to optimize the efficiency, we also have to determine the average number ofcollisions to be played. Let N 1be the average number of collisions suffered by a starterbefore it reaches the splitting surface <strong>and</strong> N 2be the number of collisions played with afragment before detection. Then the average number of collisions played In a history of astarter isN = N 1+ p,nN 2<strong>and</strong> the quality factor of the game follows from Equation (7.40) as1 "P 2D2N --- A '-- + (1 - P 1)P 2(N 14-P lnN 2) (7,41)Minimization of Q with respect to n yields(1 ~ P 2)N 10 - P 1)P 1P 2N 2^(7.42)Therefore, in order to optimize the splitting procedure above, we have to estimate theparameters p s<strong>and</strong> N 1(i = 1, 2). This can, for example, be done in a short preliminary runby scoring the average number of particles reaching the surface <strong>and</strong> detector <strong>and</strong> the numberof collisions played meanwhile.In certain cases, these parameters may be expressed by parameters more directly characterizingthe system, <strong>and</strong> then these parameters are estimated in preliminary runs. Forinstance, if transmission through a thick slab between x = 0 <strong>and</strong> x = X is estimated, thenumber density of the particles is rather well-approximated by an exponential of the forme" X x , with some X value. If the splitting surface is located at x = x,, then one can putapproximately(7.43)
460 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationswhereas the number of collisions is expressed asN 1= N 0(I - e- Xx -), N 2= N 0[I - e- X(X -"-»] (7.44)The optimum splitting ratio then follows from Equations (7.42) through (7.44) asn opl= (P 1P 2T" 2= e^ x' 2 (7.45)In this case, we have a single parameter, X, to be estimated in preliminary calculations.Notice that the optimum n value in Equation (7.45) is analogous to that in Equation(7.17), obtained from the straight-ahead model, since X = 1 — c in this model. The similarityis due to the approximation in Equation (7.43), which implicitly neglects the effect of particlesleaving <strong>and</strong> reentering the respective half-slabs, as in the straight-ahead model.A slightly more general presentation of the method outlined here can be found inReference 14; an elaborated theory based on the same principles was worked out by Dubiet al. 9 " The considerations will be extended to several splitting surfaces in Chapter 7.11Let us also note that this simplified model reflects the danger of over splitting. Thequality factor in Equation (7.41) decreases from n = 1 to n = n opI<strong>and</strong> then it increasesessentially linearly with increasing n. Therefore, when choosing a splitting ratio n less thann upI, the worst that can happen is that the efficency of the game will not be considerablyhigher than that of the analog game. On the other h<strong>and</strong>, if the splitting ratio is much largerthan its optimum value, the efficiency of the game may be even lower than it would bewithout splitting. This is due to the fact that for low values of n the variance of the scoreremains finite, whereas the number of collisions tends to infinity with increasing n.A direct statistical approach to optimization of the path-stretching parameter can bededuced from the original idea of the exponential transformation. Assume that we wish toemphasize the free flights of the particles along a given direction <strong>and</strong> also that the positionof a particle can be characterized by a unique distance value measured along this direction.For example, in the case of penetration through a slab, the direction is the one perpendicularto the surfaces of the slab <strong>and</strong> the distance is the depth of the point in the slab. In calculatingthe escape from cylindrical or spherical bodies, the favored direction may, for example,point outward along the radius, <strong>and</strong> the position is characterized by the radial coordinate.Let (a, denote the favored direction for a particle at P = (r, o>, E) = (r, E) <strong>and</strong> let x bethe distance value corresponding to r. Specifically let x be the projection of r on the direction(a,. The expectation of the score in the analog game satisfies the now very familiar Equation(5.80). With the notation of Equations (5.7) <strong>and</strong> (5.8), this equation readsM,(r,E) =[dr'Tfr + r'|E)f(r,r'|E)+ Jdr'T(r-+ r'|E) JdE 1 C(E -» E'|r')M,(r',E') (7.46)where, according to Equation (5.32)T(r-> r'|E)dr' = cr(r',E)exp| - J' ' dtcr(r + tto.E) js^,~_ T^ - l^d|r' - r| (7.47)Let us now apply the exponential transformation in the formM 1(P) = e" " 1 M 1(P) (7.48)
461.where the parameter b is for the moment undefined <strong>and</strong> should be chosen such that thevariance of the estimate is considerably lower than that in the analog game. MultiplyingEquation (7.46) by e~ bx , it is seen thatJt,(r,E) - jdr'37r-^ r'|E)[wf(r,r'|E)e- bx ']+ J dr'37r r'jE)JdE'[wC(E -» WIr)]M 1(T',E') (7.49)where/(r' - r)«3"(r-» r'|E)dr' = a(r',E)exp| - j - dto(r + tw,E)J 8 — - ijdjr' - rj(7.50)<strong>and</strong>w = cr(r',s)/cr(r',E)withr',r|Tk'.*"'!dta(r 4- to,E) = dtcrir + to,E) — b(x' — x) (7.51)Now, since x' — x is the projection of (r' - r) to w.x' — x = |r' — rj/(CtKO,) = jr' — rj/p,<strong>and</strong> the stretched cross section follows from Equation (7.51) asr}(r,E) = cr(r.E) - bp. (7.52)where p. is the cosine of the angle between io <strong>and</strong> to.:(X = CJMO,,Equation (7.49) defines a transformed game in which the score in an intercollision free flightis wfe~ bx ', the transition kernel is 2T, <strong>and</strong> the collision kernel is w • C. As was seen inChapter 5. V.E, this game is equivalent to a path-stretched game with the contribution functionf, kernels 2T <strong>and</strong> C, <strong>and</strong> stretched cross section cr, <strong>and</strong> the statistical weight of the particleis to be multipled by we~ b < x '~ x )in the free flight from P to P' = (r',E).So far, we have merely rephrased the derivation of a path-stretched game. Now, theparameter b can be determined from numerical experimental values as follows. The qualitativeresults obtained from the straight-ahead model in Section B suggest that the pathstretchedgame will be nearly optimum if the transformed moment M 1(P) is independent ofthe position, or, what is practically the same, if the density of the simulation particles iothe transformed game is constant. As a first step, let us determine from preliminary runs avalue X such thatM ,(P) = Ae K x (7.53)
462 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationsi.e., the (analog) expected score varies approximately exponentially with x. In the majorityof practical deep-penetration problems, the spatial drop of the particle density can be approximatedquite well by an exponential, thus, approximation (7.53) is reasonable. Thevalue of X in Equation (7.53) can be determined by two ways. One possibility is to startparticles from different positions (characterized by different x values) <strong>and</strong> fit Equation (7.53)to the scores. Alternatively, one may score the flux integral in small regions about selectedx values <strong>and</strong> fit an exponential of the form Be ^xto the estimated values. Having obtainedan estimate of X in Equation (7.53), the score in the transformed game will be approximatelyindependent of the position ifTH 1(P) = e~ bx M,(P) = Ae ( " ~ b)x= eousyi.e., ifb = X (7.54)Accordingly, a quasi-optimum stretched cross-section is(r(P) --- cr(P) • A/A (7.55)where A is the coefficient of x in the exponential spatial drop of the particle density in theanalog game <strong>and</strong> p is the cosine of the angle between the actual flight <strong>and</strong> the preferreddirection.Note that in certain cases the stretched cross section in Equation (7.55) may becomenegative, which poses specific problems in the simulation. This matter will be discussed inChapter 7.III.The optimal procedure outlined above was successfully applied in practical problems. 36It will be seen in Chapter 7.111 that by defining a transformed game in which not only thetransition kernel but also the collision kernel is biased, the direct statistical approach appliedabove will determine an approximation to a zero-variance game.II. OPTIMIZATION OF GEOMETRICAL SPLITTINGGeometrical splitting is one of the simplest variance-reducing <strong>and</strong> also efficiency-increasingtechniques, <strong>and</strong> is used in almost all general <strong>and</strong> special-purpose <strong>Monte</strong> <strong>Carlo</strong>codes. It is especially favored in deep-penetration calculations, but is also efficient inenhancing the particle population in regions where the analog particle density is low. Inspite of its conceptual simplicity, its use is still based mainly on intuition, practice, or "rulesof thumb". Optimization of geometrical splitting has recently gained considerable attention,mainly because of the powerful mathematical tools provided by the <strong>Monte</strong> <strong>Carlo</strong> momentequations <strong>and</strong> the concept of the direct statistical approach.Early results in optimum splitting schemes 14 ' 15are based on very simple models, similarto those presented in previous Chapters. The variance of the score in the parallel use ofsplitting <strong>and</strong> exponential transformation was investigated by Sarkar <strong>and</strong> Prasad 46on the basisof the moment equations. Juzaitis 21extended the investigations to the efficiency of a gamewith splitting <strong>and</strong> proposed to solve the moment equations by a st<strong>and</strong>ard S ncode. The resultsso obtained for single-surface splitting in monoenergetic homogeneous simulation may serveas reference values for more sophisticated schemes. Dubi. Elperin, <strong>and</strong> Dudziak 91 " <strong>and</strong> laterDubi" presented a very detailed description of a general fixed-surface splitting game throughthe direct statistical approach. Practical applicability of their analysis is still hindered by thegreat number of bulk parameters to be determined in the model. Nevertheless, simplificationof the model may yield feasible automatic optimization schemes.
463An easy-to-use direct statistical approach to a deep-penetration splitting scheme, 37basedon considerations similar to those in Section 7.I.D, will be presented in Sections B <strong>and</strong> C,<strong>and</strong> will be generalized to a more rigorous model through the concept of virtual continuoussplitting 38in Section D. The continuous splitting model is optimized in Section E, <strong>and</strong> itspractical applicability along with numerical results are demonstrated in Section F. A powerfulin-code efficiency-increasing method, called the weight window technique, 2 - 3,19is outlinedin Section G.A. GEOMETRICAL SPLITTING IN TERMS OF REGION IMPORTANCESAs was seen in Section 5.IV.B, geometrical splitting in its most general form involvesa large number of functions <strong>and</strong> quantities to be determined by the user. Recent theory <strong>and</strong>practice of optimization falls far short of covering the general case <strong>and</strong> addresses the followingproblem. For a given domain of simulation <strong>and</strong> a given reaction rate to be estimated, let usdetermine a system of splitting surfaces S 1<strong>and</strong> a set of numbers n,. The surfaces <strong>and</strong> numbersdefine a splitting procedure in such a way that whenever a particle crosses S 1from onedirection, it is split into n, particles (the fragments all having I/n, times the weight of theoriginal particle), whereas if the particle crosses the surface 5, from the opposite direction,Russian roulette is played with a survival probability 1/n..The splitting surfaces divide the domain of simulation into distinct regions (also calledcells), <strong>and</strong> the division makes it possible to define the splitting procedure in a more specialway. Instead of assigning splitting ratios to each surface, let us define* the importance ofevery region <strong>and</strong> let the splitting procedure be modified so that a particle entering a regionof importance I is split into a number of fragments, each having a weightW = W 0/! (7,56)with some constant W 0. The procedure can be realized in practice in the following way:1. Let W be the weight of a particle entering the region <strong>and</strong> leta = W/W' = WFW 0(7.57)2. If a is an integer, then the original particle is split into n = a fragments when enteringthe domain.3. If a is not an integer but is greater than one, i.e.,ifa = n + v, n > 1, 0 < v < 1then n + 1 fragments are started after the splitting with a probability v <strong>and</strong> n fragmentswith a probability 1 — v. The expected number of fragments then is (n + l)v T n(l— v) = a, <strong>and</strong> thus the expected total weight of the fragments is aW' = W, i.e.,the weight of the incoming particle is preserved.4. If a is less than unity, the particle survives a Russian roulette with a probability v =a <strong>and</strong> is killed with the complementary probability. (Note that this is a special, caseof Step 3 with n = 0.)* The importance function introduced here should not be confused with the function defined under the samename in Chapter 4. Use of identical names, although unfortunate, is well established in <strong>Monte</strong> <strong>Carlo</strong> theory.Importance here is assigned to a region, whereas the adjoint function in Chapter 4 defines the importance ofa particle in future scoring.
464 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> CalculationsIn this special formulation of the splitting procedure, optimization means a choice ofthe regions <strong>and</strong> their importances such that the efficiency of the game is maximum. Inpractice, the structure of the domain of simulation more or less determines the surfaces <strong>and</strong>regions to be used in the splitting procedure, <strong>and</strong> thus the main emphasis should be placedon the optimum choice of the importances. Considerations to this effect are given in thenext sections for essentially one-dimensional deep-penetration problems.B. A SIMPLE METHODLet the system considered be composed of a sequence of parallel, infinite slab regionswith faces perpendicular to the x axis. Let the surfaces of region i be located at x,._, <strong>and</strong> X 1(x,.., < X 1). Assume that particles enter the system at X 0<strong>and</strong> let the quantity to be estimatedbe the number of particles that leave the outermost, m'th, region. In the derivations below,we assume that1. The domain of simulation is nonmultiplying.2. Apart from splitting <strong>and</strong> Russian roulette, the game is analog.3. The probability that a particle crosses repeatedly any region surface is negligible.4. The thicknesses of the regions are sufficiently large.The last two assumptions necessitate further explanation. Let t, denote the probability thata particle entering the region i at X 1^ 1(i.e., in a positive direction) will eventually leave theregion at X 1. In brief, t tis the transmission probability through region i. Now, assumption3 may be substituted by the premise that the number of particles entering region (i + 1)from region i is proportional to I 1. Assumption 4 means that tj is considerably less than unity.The latter assumption is not essential, as will be clear from the derivation.Let I 1denote the importance of region i. This value is to be optimized to yield a maximumefficiency. According to Equation (7.56) <strong>and</strong> also assumption 3, the weight of any particlein region i isW 1= Wo/I, (7.58)Splitting or Russian roulette is played at the region boundaries, <strong>and</strong> in view of Equation(7.57), a particle entering region i from region (i - 1) is split intoa, = W 1VW 1= IvV 1, (I 0= 1) (7.59)fragments (on an average). Then the splitting rules in 1 through 3 in the previous Sectionapply witha ;= n ;4- V 1where ^ <strong>and</strong> V 1are the integer <strong>and</strong> fractional parts of a s.Let kj „, denote the number of particles that leave region (i — 1) in a positive direction(i.e., toward region i). Let us emphasize that k, , is the number of simulation particles,i.e., progeny, of the analog original particles after a number of possible splittings.Accordingly, the number of particles continuing the r<strong>and</strong>om walk from the surfaceX 1in region i isk; = k^.n, + j, 0 < j < Ic 1., (7.60)
465with a probabilityTR(JIk 1-,) = (f'-')vj(l - v,) k -> -J (7.61)The probability that k, particles out of the k, that cross X 1..., will reach the surface at x,follows from the simple binomial law asp(k,|k;) = Q'jt^l -t7) k i-\ OsIk 1S; k; (7.62)Hence, the probability that k, particles leave region i in a positive direction provided k, ,particles reach the surface at x, _, isq(k 1|k,_. 1) = 2 TRTJLK,-,)p(k,|k;) (7.63)j-oEquations (7.60) through (7.63) describe the transmission of particles through a given region.Let PJ(IC 1) denote the probability that k, particles leave region i in a positive direction due toa single starter at the surface at x (VThen, obviously, the following recurrence holds:PCk 1) = S q(k 1|k,_ 1)P 1_ 1(k 1._ 1) (7.64)whereP 0(KO) =K<strong>and</strong>, since no splitting is assumed at the starting surfaceI 1= 1, n, - 1, V 1= 0Equations (7.60) through (7.64) give the statistical description of the game, <strong>and</strong> as such,they substitute the score probability equation introduced in Chapter 5 for a rigorous treatment.What we are eventually interested in is the first <strong>and</strong> second moments of the number ofparticles leaving region m in a positive direction. These moments follow from the masterEquation (7.64) in a recursive manner. If (k[) denotes the r-th moment of the number ofparticles that leave region i in a positive direction, then(k[> = Iki-ok[p,(k,)It is shown in Appendix 7A that for r = 0, 1, <strong>and</strong> 2, we have = 1(KJ) = I 4E 1(KJ.,) = N t^ (7.65)
466 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculations<strong>and</strong>
46?moment of the score isM 2= Mf[I + 2('/Ti ~ 1/T,. ,)/1,] (7..70)j = iThe variance of the score readsD 2 = M 2- Mf = Mf 2 (1/T, - 1 /T:. ,)/1, (7.71)In order to optimize the efficiency of the scheme, we have to find an estimate of theexpected number of collisions to be played in a history. Let C 1be the average number ofcollisions suffered by a particle in region i. Neglecting the collisions suffered by particlesleaving a region in a negative direction (cf. assumption 3), the total expected number ofcollisions isN " 2 C,(k!)or, from Equation (7.69)N - 2 C 1T 1.. ,1, (1 T>\Thus, from Equations (7.71) <strong>and</strong> (7.72), the quality factor of the game readsQ = D 2 N = MfI (1/T 1- 1/T 1_,)/!, (V C 1T,. JEquating the derivative of Q with respect to 1, to zero, we obtain the quasi-optimum importances:I 1= OtI(T 1_, ~ T 1V(C 1T 2 ..,T,)] 1/2 (7.73)where a is constant <strong>and</strong> is determined by the conditionI 1= 1The quality factor with the optimized importances becomesf m 1 2Q„P, = Mf J2 [C 1(T,.., ~ T,)/T,]" 2 J (7.74)The quasi-optimum importances in Equation (7.73) contain the bulk parameters T 1(transmission from x„ to x,) <strong>and</strong> C 1(number of collisions in region i). These bulk parameters canbe determined in a preliminary small-sized run <strong>and</strong>/or can be modified in a production run.Thus, for using the importances in Equation (7.73), one has to estimate 2m bulk parameterswhere m is the number of regions. Introducing some further approximations, the number ofbulk parameters can be reduced to just one. Let us first note that to a reasonable accuracy.
468 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationsthe collision density Q is connected to the transmission probabilities asC 1= C(I - t,) = C(T 1., ~ T 1)ZT 1This relation states that the number of collisions in a region is approximately proportionalto the nontransmission probability through the region. Inserting this approximation intoEquation (7.73), the quasi-optimum importances becomeI 1= a(T 1.. 1T 1)- 1 ' 2 (7.75)Here we have left m bulk parameters to be fitted. If we further assume that from preliminaryruns or by other means we know that the (physical) particle flux in the system drops like4> ~ exp( —Xx)with some positive X, then the transmission probability can be approximated asT 1== e- X x i<strong>and</strong> the importance of the region becomesI 1= aexp[X(x, + x, „0/2] (7.76)The number of split fragments due to a particle entering region i follows from Equation(7.59) asa, = 1/V 1= CXp[X(X 1- x,_V2] (7-77)Thus, for an approximate optimization of the splitting procedure, the only quantity to bedetermined in test runs is the exponent in the spatial flux-drop. Note that Equation (7.77)is a direct generalization of the approximate single-surface result in Section 7.1.D. Numericalexperiments show (cf. Section F) that the optimization method proposed in this section givesreliable results, <strong>and</strong> considerable gain in efficiency is obtained by its use in realistic problems.37Equations (7.73) <strong>and</strong> (7.76) define an easy-to-use splitting procedure applicable in mostof the deep-penetration problems. The strategy based on Equation (7.76) takes into accountthe overall characteristics of the system (through the average exponential drop of the flux).In the method defined by Equation (7.73), the number of split fragments is also influencedby the specific properties of the region entered.C PROPERTIES AND REFINEMENTS OF THE METHODIn the derivations above, we have assumed that no biasing technique other than splitting<strong>and</strong> Russian roulette is applied in the game. Survival biasing, however, is almost alwaysapplied in practical calculations, <strong>and</strong> therefore it may seem doubtful that the splitting schemeabove is also optimal in practical situations. This doubt, however, is groundless as it canbe shown 37that for splitting surfaces situated equidistantly in a homogeneous slab, the quasioptimumimportances are exactly the same as the ones given in Equation (7.73), irrespectiveof whether survival biasing is used or not. It can also be proven that even if the splittingsurfaces are located at arbitrary distances, introduction of survival biasing hardly influencesthe quasi-optimum importances. Note that equality of regionwise importances does not meanthat the number of split fragments in games with <strong>and</strong> without survival biasing are equal. In
469fact, the number of fragments are definitely different since in a game without survivalbiasing, the weight of a particle does not change inside a region, <strong>and</strong> therefore the numberof fragments due to a particle entering region i from region i — 1 is given in Equation(7.59) asa, = W,_ ,/W, = I 1ZI 5_tOn the other h<strong>and</strong>, in a game with survival biasing, the weight of a particle is changed inevery collision <strong>and</strong> if a particle enters region i — 1 with a weight W 1_.,, it will leave theregion with a weightW;_, < W,_.,(talking about nonmultiplying games). Therefore, the number of split fragments due to aparticle crossing the surface between regions i — 1 <strong>and</strong> i isw; ,a, = WIVW 1= T^R- 1 Vi,---, ^ ai.e., the number of split fragments is usually lower in a survival-biased game than in ananalog game.Note that the particles start from a splitting surface with identical weights in both games.In other words, survival biasing influences only the number of particles present inside theregions, but splitting makes the number of particles at the surfaces equal in the two games.Therefore, if the surfaces are sufficiently closely spaced, survival biasing has no essentialeffect on the simulation. Hence, we conclude that sufficient frequent splitting may take overthe role of survival biasing in deep-penetration calculations.The splitting scheme in Section B has been optimized under the tacit assumption thatthe computing effort necessary for playing the splitting procedure is negligible. In pracitce,however, this is not always true since one has to select a new free flight for every fragmentborn in a splitting, which may require considerable computing time. The results of SectionB can be easily rewritten in a form that also accounts for the time of splitting. Let T cdenotethe computing time necessary for playing a collision, let T sbe the time spent starting afragment, <strong>and</strong> definey = T 0Ar 5With the notation of Section B, the expected number of fragments entering region i is< k[ >, <strong>and</strong> therefore the expected computing time spent with splitting follows from Equation(7.69) asmmft, = E
Q = iy.M 2 2 (1/T, - 1/1,..,)/1, £ (C 1+ 7TiV 1I 1470 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationsinstead of N, i.e., the quality factor to be minimized readsIt is seen that minimization of Q yields optimum importances which are analogous to thosein Equation (7.73), with the only difference that C 1+ y replaces C 1, i.e.,I = H{(T, , - T,)/[(C, + T)TK 1T 1]}" 2 (7.78)The optimized quality factor then readsQ„„, = T cM 2 |I [(C 1+ 7)(1 - t,)/t,]" 2 J 2 (7.79)It can be seen that in most practical deep-penetration problems, Q in Equation (7.79)decreases with increasing m, i.e., the efficiency increases with an increasing number ofregions. This can be proven heuristically be! interpreting Equation (7.79) as a discreteapproximation to the integral of a decreasing function of the coordinate x, i.e., the integralof a continuous decreasing function is approximated by the integral of a stepwise decreasingfunction. This observation suggests that the more splitting surfaces that are used, the higherthe efficiency that is reached. In the ideal case, the weights <strong>and</strong> numbers of the particlesare altered continuously along the histories. The ideal case, of course, cannot be realizedin practice; nevertheless, the introduction of a hypothetical continuous splitting procedurecan lead to a more accurate optimization of the splitting scheme. This will be attempted inthe next sections. In the derivation of the continuous splitting scheme, we shall remove aserious limitation of the model above, namely, assumption 3 in Section B is dropped <strong>and</strong>the backward propagation of the particles is explicitly accounted for.I). THE CONTINUOUS SPLITTING MODELWe shall consider again the transmission of particles through a nonmultiplying slabsituated between x = 0 <strong>and</strong> x = X > 0. <strong>Particle</strong>s enter the slab at x = 0 <strong>and</strong> the numberof particles reaching x = X due to a starter is estimated. The hypothetical splitting schemeis defined as follows. A particle starts with a unit weight from x = 0 <strong>and</strong> is continuouslysplit into a number of simulation particles along its path in such a way that the weights ofthe simulation particles at any x value are W(x) according to the relationW(x) = 1/I(x)with some given function I(x). In other words, if a particle at x has a weight W(x), it issplit into I(y)/I(x) identical simulation particles, each having a weight W(x)I(x)/I(y) = 1/I(y), while it travels to y. I(x) is the importance function to be determined such that theefficiency of the hypothetical game is maximum.The continuous splitting game is very much different in nature from the realistic <strong>Monte</strong><strong>Carlo</strong> games. The number of particles in a real simulation is always integer: in contrast, the"number" of simulation particles in the continuous game may also assume noninteger values,<strong>and</strong> it varies continuously along the x axis. In order to clarify the meaning <strong>and</strong> justify therelevance of such a hypothetical game, two questions are to be answered:1. How can such a game be connected to a real <strong>Monte</strong> <strong>Carlo</strong> simulation?2. How can the optimum continuous importance function be applied in practical realizations?
471As for the first question, let us realize that the integrity of a real particle manifests itselfonly when the particle crosses geometrical boundaries or when it enters a collision. Therefore,the simulation particles of the continuous splitting game can be converted to "real" particlesat every important instance by forming "entire" particles out of them at real collision points<strong>and</strong> at geometrical surfaces of interest. Specifically, if x is the site of a real collision or aboundary crossing <strong>and</strong> k(x) denotes the number of hypothetical particles at x, then one canrelate the hypothetical continuous splitting game to a real game by setting the number ofreal particles at x equal tok -ent[k(x)jwith a probability k + 1 — k(x) <strong>and</strong> to k + 1 with the complementary probability. In otherwords, the equivalent real particles materialize after a Russian roulette played with thefractional part of the hypothetical simulation particles.The mathematical description of the continuous splitting game would be troublesomein terms of the usual transition <strong>and</strong> collision kernels since the latter define discrete jumpsin the phase space <strong>and</strong> may not account for a continuous variation of the number of simulationparticles. An additional difficulty associated with the idea of the continuous game is thatsplitting is always followed by the reselection of the free flights of the fragments, which isclearly not feasible in the case of continuous splitting. The problems above can be bypassedby using a transport model which does not account for the elementary processes of collision<strong>and</strong> transition explicitly, but is built up in terms of transmission <strong>and</strong> reflection probabilitiesin infinitesimally thin slabs. The idea is analogous to the invariant embedding approach tothe transport equation. In this concept, (a possibly noninteger number of) simulation particlesappear independently at the faces of the infinitesimal slab <strong>and</strong> the averaged result of thephysical processes inside the slab is described by the transmission <strong>and</strong> reflection probabilities.The treatment will necessitate the introduction of certain approximations, but will excludethe necessity of a detailed collision-by-collision description of the migration. Scoring in thecontinuous splitting game is analogous to that in a normal game, i.e., the score due to astarter is the product of the number <strong>and</strong> the weight of the particles that reach the surface atx = X. The weight of a particle at X is always equal to 1/I(X); the number of particlesreaching X is a r<strong>and</strong>om variable. Various moments of the score are obtained by taking the,expectation of powers of the score with respect to the probability density of reaching thesurface at X. The probability density function of the number of transmitted particles, inturn, follows from a master equation built up in terms of the transmission <strong>and</strong> reflectionprobabilities.Regarding the question of practical realization, we mention in advance that the optimumimportance function I(x) will be expressed in terms of functions of x which, in turn, aredetermined by the material composition of the system. If these functions can be determinedin preliminary runs or by approximate calculations, then one may define a splitting surfaceanywhere along the x axis or, alternatively, one can use collisionwise splitting, <strong>and</strong> a particleat x is split into a number of fragments in such a way that the weights of the fragments willbe equal to 1/I(x). The more surfaces that are introduced, the better the approximation ofthe optimum continuous scheme.If the x-dependent functions composing I(x) are not available explicitly, one can proceedin the usual way by defining fixed splitting surfaces <strong>and</strong> regions between them. The continuousimportance function I(x) is then replaced by region importances after averaging I(x)over the regions. The bulk parameters appearing in the averaged importances are thendetermined in a preliminary run. Practical realization of the optimized scheme will bediscussed in more detail in Section F.Let us note two peculiarities of the continuous splitting game. First, since the weights
472 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationsof the particles are uniquely determined by the importance function at every spatial point,survival biasing is automatically included in the model. Second, this scheme unifies all thepossible practical splitting procedures in the sense that any such procedure (such as collisionwiseor geometrical splitting) follows from the continuous splitting scheme as a special(approximate) case.To conclude the preliminaries, let us introduce the basic quantities that are involved inthe construction of the score probability equations. The following probability densities aredefined:P (k,x)dk — The probability that dk particles about k are crossing (per unit time) thesurface at x in a positive/negative direction due to a starter at x = 0. (Positive directionspoint toward increasing x values.)T(k,k'|x,y)dk' — The probability that dk' particles about k' are transmitted through alayer between x <strong>and</strong> y, provided k particles enter the layer.R(k,k'jx,y)dk' — The probability that dk' particles about k' are reflected from a layerbetween x <strong>and</strong> y, provided k particles enter the layer.The definitions above imply a number of assumptions <strong>and</strong> the model to be built up on thebasis of the densities above will be realistic to the extent that these assumptions are valid.Thus, we have implicitly assumed that the transmission <strong>and</strong> reflection probabilities areindependent of the direction of the particles in the sense thatA(k,k'|x,y) = A(k,k'|y,x) for A = T or R (7.80)This is only true if the cross sections do not depend on the particle direction, <strong>and</strong> thereforeno path stretching is compatible with the model. Another implicit assumption of the derivationbelow is that the probability densities above do not depend explicitly on the energy-directiondistribution of the particles. In fact, for a given energy distribution of the starters, the energydirectiondistribution of the particles in the slab is uniquely determined by the position (<strong>and</strong>the material properties of the slab), <strong>and</strong> this assumption is justified. The optimum importancefunction determined below will be expressed in terms of functions deduced from the transmission<strong>and</strong> reflection probabilities. Therefore, the accuracy of the results will eventuallydepend on the approximations introduced when the functions are replaced by bulk parameters.The following equalities will be assumed:dkP ± (k,x) = 1, dkk"P*(k,x) < «>,(v = 1,2) (7.81)lim T(k,k'|x,x + dx) = T(k,k'|x,x) = S(k - k') (7.82)dx^O<strong>and</strong>lim R(k,k'|x,x + dx) = R(k,k'|x,x) = 8(k') (7.83)dx^OEquation (7.81) requires that the probability of an unbounded population be zero <strong>and</strong> thatthe first two moments of the number of particles present anywhere in the system be bounded.In other words, Equation (7.81) ensures the feasibility of the game. Equations (7.82) <strong>and</strong>(7.83) are heuristically trivial; they state that the probability of the transmission through aslab of zero thickness is one <strong>and</strong> the probability of the reflection from it is zero, respectively.For the sake of exactness, we note that for extreme scattering laws, the limits on the RHS
473of Equations (7.82) <strong>and</strong> (7.83) are not necessarily equal to the values of the function at dx= 0. Such extreme cases, however, will be excluded from our treatment.In the next section, invariant embedding-type equations will be constructed concerningthe densities P*, <strong>and</strong> the efficiency of the splitting procedure will be optimized in thestatistical model defined by these equations.E. OPTIMIZATION OF THE CONTINUOUS SPLITTING SCHEMELet us consider an infinitesimal slab between x <strong>and</strong> x + dx. First, we construct themaster equations that describe the variation of the probability densities P* in the infinitesimalslab. The probability that dk particles about k cross the surface at x + dx in a positivedirection is expressed asP + (k,x + dx)dk - Jdk,jdk 2Jdk'P + (k ],x)T(k l,k'|x,x + dx)xR(k 2,k - k"jx,x + dx)P-(k 2,x + dx)dk (7.84)wherek" - k'Kx + dx)/I(x) (7.85)Equations (7.84) <strong>and</strong> (7.85) have an obvious interpretation. The number of particles at x<strong>and</strong> x + dx are different for two reasons: First, the particle number is changed due to theattenuation during the transmission from x to x + dx <strong>and</strong> during the reflection of particlesentering at x + dx in a negative direction. Second, the continuous splitting procedure alsochanges the number of particles. The integr<strong>and</strong> on the RHS of Equation (7.84) is theprobability density of the following events: k, particles enter the slab at x, <strong>and</strong> k' of theseare transmitted to x + dx <strong>and</strong> then split into k" particles according to Equation (7.85).Simultaneously, k 2particles enter the slab at x + dx <strong>and</strong> k — k" particles return to x +dx without leaving the slab at x. Integrating this probability density over the possible incomingparticle numbers, we obtain the probability density of the outgoing particle number at x +dx in accordance with Equation (7.84).Analogously, the number density of the particles leaving the infinitesimal slab in anegative direction at x is expressed asP (k.x)dk = Jdk 1jdk 2jdk'p-(k 1,x + dx)T(k,,k'|x,x 4- dx)Rika - k"|x,x + dx)P + (k 2,x)dk (7.86)withk" = kT(x)/I(x + dx) (7.87)As usual, we do not work with the probability laws; instead, we shall construct equationsgoverning the moments of the r<strong>and</strong>om variable k. Thus, let K 1, (x) denote the v-th momentof the number of simulation particles traveling in positive/negative directions at x, i.e., letK7(x) = dkk"P ± (k,x) (7.88)The moment equations will follow from Equations (7.84) through (7.88) after exp<strong>and</strong>ingthe functions at h<strong>and</strong> into a Taylor series around x <strong>and</strong> letting dx tend to zero. As a first
474 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationsstep, let us introduceX(x) - ~ logj(x) (7.89)dxWith this notation, Equation (7.85) becomesk" - k'[l + X(x)dx] + 0(dx 2 )Next, let us exp<strong>and</strong> the reflection probability R in Equation (7.84) into a Taylor series withrespect to its k" argument to yieldR(k 2,k - k"x,x 4- dx) = [1 - X(x) — k'dx]R(k„k - k'jx.x 4- dx)3kThen Equation (7.84) can be rewritten asP + (k,x + dx) = J dk,J dk 2J dk'H(k,,k 2,k',k|x,x 4- dx)X(x) JdkJdk 2jdk'H(k,,k 2,k',k|x,x 4- dx) 4 0(dx 2 ) (7.90)where we have used the shortened notationH(k,,k 2,k',k|x,y) = P +(k,,x)T(k,,k'|x,y)x R(k 2,k - k'|x,y)P~(k 2,y) (7.91)Finally let us exp<strong>and</strong> Equation (7.90) into a Taylor series around x. The LHS becomesP + (k,x) + — P + (k,x)dx 4- 0(dx 2 )3xThe RHS contains the Taylor series of the function H in Equation (7.91):_3_H(k,,k 2,k',k|x,x 4- dx) = H(k,,k 2,k',k|x,x) + — H(k,,k 2,k',k|x,y)| y = xdx 4- 0(dx 2)dyIn view of (7.82), (7.83) <strong>and</strong> (7.91) we haveH(k,,k 2,k',kjx,x) = P'(k,,x)8(k, - k')8(k' - k)P-(k 2,x)whereas differentiation of Equation (7.91) yieldsdyH(k„k 2,k\k|x,y)| y = x= P^k^xMk^k'lx^k' - k)P-(k 2,x)+ P + (k,,x)8(k 1- k')r(k 2, k - k'|x)P (k 2,x)d+ P'(k,,x)8(k 1- k')o(k' - k) — Pdx(k 2,x)
475In the equation above we have introduced the notationst(k,k'|x) = — TXk.k'lx.y)!,.,ay(7.92)<strong>and</strong>r(k,k'jx) = — R(k,k'|x,y)U, (7.95Inserting the equations above into Equation (7.90) the probability density equation becomesf) dP + (M) + — P + (k,x)dx = P + (M) - A.(x) — [kP^(k,x)|dxdxelkdk,P + (k 1,x)t(k,,k|x)dx (7.94)dk, dk 2P + (k,,x)r(k 2, k - k,|x)P-(k 2,x)dx 4- 0(dx 2)Note that in the algebraic manipulations that lead to Equation (7,94) we have putdk 2P (k 2,x) =that follows from Equation (7.81). Now, dividing Equation (7.94) by dx <strong>and</strong> letting dx tendto zero, we haved a "A(x) - k + -ak ax P'(M) = Jd^P+ (Mx)I(MkIx)|dk,jdk 2P + (k.,x)r(k 2 ,k - k,|x)P~(k 2,x) (7.95)By similar arguments, the counterpart of Equation (7.95) follows from Equation (7.86) asa a i fX(x)~rk + — P-(M) = dk.P-(Mx)t(Mk|x)ak ax J+ Jdk,Jdk 2P (k,,x)r(k 2,k - k,|x)P + (k 2,x)Assume that exactly one particle enters the slab at x = 0 <strong>and</strong> none at xboundary conditions for Equations (7.95) <strong>and</strong> (7.96) areX.P + (k,0) = 8(k - 1), P (k,X) == 8(k)(7 97)Solution of the equation system in Equations (7.95) through (7.97) mayfortunately, we are only interested in the first <strong>and</strong> second moments of the p;in Equation (7.88). Taking the v~th moment of Equations (7.95) <strong>and</strong> (7.
476 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationsequation system is easily obtained:dxvk(\) Ks(x) = dk'l 1,(k'|x)P*(k'.x)+ 2 (PKr)(X) aVr^k'bOP^k'.x)(7.98)The boundary conditions in Equation (7.97) yieldkt(0) = 1, k;(X) = B v, 0(7.99)In Equation (7.98), the following notation has been introduced:Uk'jx) = jdkk"t(k',k|x) = — { dkk"T(k'.k|x,y)| y(7.100)<strong>and</strong>r„(k'|x) = |dkk"r(k',k]x) = — F dkk"R(k',k|x,y)| y(7.101)Equation (7.98) is not yet suitable for further manipulations because in its RHS it containsthe moments of the functions t <strong>and</strong> r, <strong>and</strong> not only the moments of P ' . In order to proceed,we introduce a further assumption concerning the transition <strong>and</strong> reflection probabilities.Let us note that for integer values of the particle numbers k <strong>and</strong> k', the probabilitieshave the formA(k',kjx,y) = A')A k (x,y)[l - A(x,y)] for A - T or R (7.102)whereA(x,y) = (i.l|x,y)for A = T or RThe moments of t <strong>and</strong> r follow from Equations (7.100) <strong>and</strong> (7.101), with the aid of Equation(7.102), as0(k'|x) - 0, a,(k'|x) ----- k'a(x) (7.103)<strong>and</strong>a 2(k'|x) = 2k' 2 a(x)A(x,x) + k'2(x)[l - 2A(x,x)] (7.104)where a = r or t <strong>and</strong> a(x) is related to the derivatives of T <strong>and</strong> R in Equations (7.92) <strong>and</strong>(7.93) asa(x)da (1,1 x) - —• A(x,y)dyfor a = t or r, <strong>and</strong> A = T or R. Now, since T(x,x) =1 <strong>and</strong> R(x,x) = 0, we have from
47'?Equations (7.103) <strong>and</strong> (7.104).t,(k'|x) = k't(x),U(k'|x) = K'(2k -- I)T(X)<strong>and</strong>r,(k'jx) =r,(k'ix)k'r(The relations above hold for integer values of ! ^ ' ,tjar noninteger values of k'. 'Then introducing (,'s, (,i,(7.98), we obtainddxX(x) Ki(X) = t(x)K-f(x) + r(x)K](x)for the first moments <strong>and</strong>-- - 2X(x)dxK 2(X) == t(x)|2Ki(x)Kv(X)r(x)K; (x)[l + 2Kf(X)]for the second moments. Equations (7.107) <strong>and</strong> (7.108) . > >- >•of simulation particles propagating in positive <strong>and</strong> neg;x in the slab. What we are really interested in is the \ U 1 1, n >.,.variance of the number of real particles leaving the slab « . iparticle at x has a weight equal to 1/I(x), the v-th monat X, i.e., the vth moment of the score, is related to the mot. A
478 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> CalculationsMultiplying Equation (7.107) by 2Kf-(x), substracting it from Equation (7.108), <strong>and</strong> dividingthe result by F(x), we obtain the equationdx- 2X(x) IF(X)D ;(x)] = 2t(x)D:(x) - ft(x)M;(x) - r(x)M j (x)J/I(x)or, sinceI(x) =expdx'X(x')the derivative on the LHS readsddx[F(X)DT(X)] = [2X(X)Df(X)dx D) 1(X)]F(X)<strong>and</strong> we haved_dx2t(x) D|(x) = b ±(x)/I(x)(7.111)withb ±(x) - t(x)Mf(x) + 1•(X)Mf(X)(7.112)The corresponding boundary conditions follow from Equations (7.99) <strong>and</strong> (7.109) asD 2 (0) = Dl(X) = 0 (7.113)Equations (7.111) <strong>and</strong> (7.112) contain the moment Mf. Although this moment could beobtained from Equation (7.110), we do not attempt to solve this equation since the solutionvery likely would not represent a sufficiently accurate approximation of the exact particledistribution <strong>and</strong>, as such, would have no merit in the approximate evaluation of the transmissionrate. On the other h<strong>and</strong>, as was seen in Section 7.1.A <strong>and</strong> also in numericalexperiments, 21the efficiency is not very sensitive to small variations in the form of theimportance functions. Thus, more easily obtained approximations to M,' will be appropriatein the expression of the variance. Therefore, in the solution of Equation (7.1 1 !), we proceedas if Mf were known <strong>and</strong> approximation to these functions will be inserted into the finalresult.liquations (7.1! 1) through (7.113) are easily solved to yieldD.;(x) = 2T" 2 (x)dx'b.,(x')fF(x')/I(x')(7,114)where2+(x) = exp[- dx't(x')] (7.1 !5)Since Mf (x) is the expected number of real particles at x, it is independent of the
479importance function. Accordingly. b,(x) in Equations (7.112) <strong>and</strong> (7.1 Kpendent of I(x).In order to optimize the efficiency of the game, it remains to estimate the iof collisions to be played in a history due to a starter. Let s(x)dx be the prsimulation particle at x suffers a collision within dx about x. Then the expecollisions due to a starter isL = J dxs(x)[K )(x) + K , (X)IIn view of Equation (7.109), it can be rewritten asL = | dxs(x)I(x)[M)(x) + M 1(X)]The quality factor of the game isQ = D ; (X)L?3>- 2 (X) dxb .,(X)^(XVI(X')Xdxs(x)[M)(x) •+M 1(X)]I(X)Elementary variational considerations show that Q is minimum ifI 2 (x) = const. fF-(x)b +(x)/{s(x)[M{(x)+- M 1U)J}Finally, inserting b+(x) from Equation (7.112) into this expression, the optimum importancefunction readsP(x) = const. SP(x)[--t(x)M-;(x) + r(x)M)(x)]/{s(x)[M ; U) 4- M 1(X)!} (7 116;The constant factor is to be chosen such that 1(0) = 1.Let us note that making use once more of the explicit form for the first-moment Equation(7.110), an alternative, expression of the optimum importance FUNCTION can be derived itfollows from Equations (7.110) <strong>and</strong> (7.115) thatf 2 (x)[-t(x)Mt(x)4- r(x)M)(x)]" d— M)U) - 2EU)MIU)dx'(PCx)= A[ ? F ( x ) M1 (x)]dxi.e., the optimum importance function becomesF(x) = const. — [^2(x)M;{x)]/{s(x)|M J(X) 4 M , (x)\\ i7.;H4dxThe expressions of I(x) in Equations (7.116) <strong>and</strong> (7.11.7 , < ont,u,i i i>. b > tnot known before a <strong>Monte</strong> <strong>Carlo</strong> game is started. In pract,.,a> ici ! i/ao>m ol n>, 'p'cs'iiprocedure, approximate <strong>and</strong> estimated values must replace the functions in Hx;. SUCH approximationsusually are obtained from preliminary runs. In the next section, recipes arcproposedfor possible uses of results of preliminary runs in this particular scheme.
48© <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> CalculationsF. PRACTICAL REALIZATIONSLet us consider the problem of particle transmission through a nonmultiplying slabperpendicular to the x axis. Let the slab be composed of m homogeneous slab regions dividedby surfaces at X 1, x ?, ..., x m..,. We wish to determine approximately the optimum importancevaluesI 1assigned to the regions i (between X 1^ 1<strong>and</strong> X 1). The particles start from x„ <strong>and</strong>score whenever they reach the surface at x m. The importances will be deduced from theoptimum importance function in Equations (7.116) <strong>and</strong> (7.117) through regionwise averagesof the quantities involved.Let us assume that from preliminary runs we have estimates M 4 " (ii of the number of(real) particles crossing the surfaces at X 1(i = 1, 2, — m) in positive/negative directions<strong>and</strong> also estimates N 1<strong>and</strong> of F 1of the (.real) collision rates <strong>and</strong> flux integrals in regions i.Furthermore, assume that the number of particles crossing a surface at x has the functionalformMy(x) = M' : (i - l)exp|-\j(x - x,..,)], x,.., < x s x ;(7.118)In most practical cases, the exponential approximation above is sufficiently accurate. Theexponents X 11* follow from the continuity of M((x), i.e., from the relationMv (x,) -= M*(i)AccordinglyXf = logJM- 4 Ti)M*(! - l)]/(x, - x,_,) (7.119)[Note that, for the last region, M"(m) = 0 <strong>and</strong> approximation (7.118) does not hold. Inthis case, for example, a linear interpolation may be used.] Finally, let us introduce thenotationt(x) = t,, r(x) - r 1(for x,_.j < x < X 1since in the homegeneous regions, the functions t(x) <strong>and</strong> r(x) are constant.*Two forms of the quasi-optimum importances will be derived below, based on the formsof the optimized importance function in Equations (7.116) <strong>and</strong> (7.117), respectively.For sufficiently thin regions, the importance function in Equation (7.116) can be approximatedby the integral means of the quantities, e.g., asl 2 (x) - const. S F 2 / - ^ - ^ 2 J J dx[ -tMt(x)+ T 1My(X)] j £ dxs(x)[M )(x) + MT(X)Jfor Xj_ i £ i x =¾ X 1. Note that the denominator is just the number of collisions in region i,which is estimated by N 1. The integral in the numerator follows from Equation (7.118) asStrictly speaking, t(x) <strong>and</strong> r(x) may also depend on x in homogeneous regions because no explicit energydependence is included in the model, but different energy distributions of the particles at different sites areassumed to be reflected by the functions t(x) <strong>and</strong> r(x). Nevertheless, for sufficiently thin regions, this xdependence can be neglected.
481- ---!'M + (I - i) - M + (i)l + —IM-(J - i) - M-(i)lX- X-whereas from Equation (7.115)^(^Y^-) = EX P[-2 {"""W)]i -1= cxpl ~2]£ I 1Cx 1--X 1,) - t,(x, - X, .,)jTherefore, the importance of region i follows from the optimum importance function asI, = const. ff( Xi V'")! "^7TlMMi - I) M-(J)]+ ^ [M-(i - 1) - M-(1)]j' /VN~ (7.120)The constant factor is to be chosen so that I 1= 1.We note in passing that since the transmission probability is a decreasing function ofthe thickness, t(x) is negative <strong>and</strong> the region importances increase approximately exponentiallywith the distance from the particle source.In order to express the importances in terms of estimated quantities only, it remains todetermine the coefficients I, <strong>and</strong> r, through M*(i) F 1<strong>and</strong> N 1. Let us first oote that thetransmission <strong>and</strong> reflection probabilities of a slab are not independent; they are related bya conservation relationT(x,x + dx) + R(x,x + dx) =- I -- P a(dx)where P a(dx) is the probability that a particle entering a slab of thickness dx at x isin the slab. Equation (7.121) expresses the conservation of the particles in a nonrrinfinitesimal slab. If we assume isotropic incidence, the directional density of tlentering the slab at x is 2p,djx, where jx is the cosine of the angle between tfdirection <strong>and</strong> the x axis. The probability of an absorption in a flight along the dis cr a(x)dx/|A, where cr a(x) is an average absorption cross section at x (averagepossible particle energies). Thus, the overall probability of absorption in the in!slab isP a(dx) = cr a(x)dx 2(xd(j7jx = 2«r a(x)dxThus, from Equation (7.121) <strong>and</strong> from the definitions of the functions t(x) <strong>and</strong> r(x), wehavelimT(x,x +dxdx)R(x,x + dx)"dxt(x) + r(x) =-2cr 0(x)The average absorption cross section in region i may be approximated a «l,e J 1 < 1 >absorption rate to the flux integral in region i. Thus, if A, denotes the ESIIMAII .1 . .»
482 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationsrate, theno- a(i) « A 1ZF 1On the other h<strong>and</strong>, the absorption rate in region i is the number of particles entering, butnot leaving, the region, i.e., it can be calculated from the partial currents asA 1= Mc (i - 1) - iVP(i) + M (i) - M"(i - 1)Hence,t, + r, = -2(J 11(I) = -2LM + (i - 1) - M + O) + M-(D + M"(i - I)]ZF 1(7.122)where, as before, F) is the flux integral in region i. Two remarks are in order here. First,for the sake of brevity, we shall call M- (i) the partial currents through the surface i, althoughin a strict sense they are not currents, but numbers of crossing particles. Nevertheless, inmost practical cases they are, to a fairly good approximation, proportional to the currents,<strong>and</strong> since all the formulas to be derived contain only ratios of M +, estimated currents canalso be used in place of the estimated number of crossing particles. Second, the absorptionrate introduced above is comprised not only of those particles that are effectively capturedin a collision, but also of those which leave the domain of simulation through other processes,e.g., by leaving the energy domain considered or by escaping from the system in a directionperpendicular to the x axis (if the system is not infinite in this direction).Equation (7.122) provides us with a relation between f, r i;<strong>and</strong> the estimated quantities.Another such relation is deduced from Equation (7.110). Making use of the approximateform of the particle numbers M 1+(x) in Equation (7.118), the first-moment equation reducesto-X + M + O - 1) = t,M + (i - 1) + F 1M-(I - 1) (7.123)The solution of Equations (7.122) <strong>and</strong> (7.123) for f <strong>and</strong> r ;is^ = -X + - M 0 - I)[X + - 2(T 11 O)]Z[M + O - 1) - M'-(i - 1)] (7.124)<strong>and</strong>T 1= M + (I - I)[X + - 2(T a(i)]Z[M + (i - 1) - M-(i - 1)] (7-125)where a a(i) is given in Equation (7.122).In conclusion, the regionwise optimized importances are given by Equations (7.119),(7.120), (7.122), (7.124), <strong>and</strong> (7.125) in terms of the estimated partial currents M + (i),collision rates N 1, <strong>and</strong> flux integrals F 1. The method is easily implemented in any productioncode prepared for regionwise splitting, <strong>and</strong> it defines an approximately optimum splittingscheme for deep-penetration calculations In nonmultiplying media composed of homogeneousslabs or other geometrical forms that can be approximated by slabs (e.g., concentric cylindersof large radii).Note that Equation (7.123), together with its counterpart,X 1M-(I - 1) = I 1M-(I ~ 1) + T 1M + (I ~ 1) (7.126)
483gives an opportunity of checking the consistency of the approximations used in •rvations. Indeed, the sum of Equations (7.123) <strong>and</strong> (7.126) yieldst, + r, = HATM + (I - I) - XiM"(s - i)]/lM + (i - i) - M" (i - D] (7.17"':which can be compared to Equation (7.122).An alternative approximation to the optimum regionwise importantaking the integral means of the numerator <strong>and</strong> denominator of EquationhaveI 1= COiIStJiF(X 1)M + (I) - IF(X 1^ 1)M-(I - I)] 1 7 2 ZVN',or, according Io Equation (7.115)I 1= const. ^ ^ L ~ h L i y c~ ^ ~ ^ o ^ (j) _ eyxi-x, ,,^ 1-/, .... ^yaj-This expression, although simpler than that in Equation (7.120), is much moreto the approximations of the model [e.g., M,"(x) is canceled on the basis of Equ •<strong>and</strong> therefore is expected to be less accurate than Equation (7.1.20).The schemes above define quasi-optimum importances to be applied in«the energy of the particle to be split. The considerations above can be easi'> »-»« reproduceenergy (or energy group)-dependent importances. This, however, iof energy-dependent estimated quantities to be obtained in preliminary runs, v,Mn •information, however, can only be obtained at the expense of extra computpreliminary runs, <strong>and</strong> it is not a priori clear that such a loss during the Initoff in the production ran. In the case of self-learning algorithms [i.e., wher< '",•> < m \m-i i ilayout of the domain of simulation. It is composed of concentric cylindrical shells
484 <strong>Monte</strong> <strong>Carlo</strong> Panicle <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculations170. 180RADIAL DISTANCE [cm]FIGURE 7.1.Geometry, estimated quantities, <strong>and</strong> importances in optimization of geometrical splitting.leakage rate, D 2is its estimated variance, <strong>and</strong> T is the computing (CPU) time spent in therespective calculations. In the calculation of a point in Figure 7.2, approximately 200,000neutrons were started; a typical run took 50 min on an ESR 1040 computer.It is seen from the results, approximately optimized geometrical splitting yielded a fairlylarge gain in efficiency, even for a not-too-deep penetration (the thickness of the system isabout 10 mfp). The efficiency of the game in the neighborhood of the quasi-optimumimportances (x ~ 1) is about eight times higher than without splitting (x = 0). In estimatingtransmission through much thicker systems, the optimized splitting procedure is expectedto yield considerably higher increases in efficiency jcf. Equation (7.17)].
mi-11.5A 3.- QUALJTY FACTOR INLEAKAGE EST iMAT 10i LEFT SCALE)— QUALITY FACTOR INCOLLISION RATEESTIMATION( RIGHT SCALLA1.0\ \\\\\\\0.50.40.3\\\ \/4IG-0.60.2-—()./.0.HO „ -----o--0.2j j f , , 1 j T 1—-j TO 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0 1.1 1.213POWER OF IMPORTANCES (%)FIGURE 7.2.Quality factor vs. importances. Regionwise quasi-optimum importances raised to various powersThe resulting efficiency is seen to he not too sensitive to the variation of the importancesin the vicinity of the optimum values. It is also seen that in the case of oversplitting, theprocedure departs faster from optimum than in the case of undersplitting.The collision rate in the outermost region was also estimated in parallel with the leakagerate. Empty circles in Figure 7.2 show the relative quality factors relating to the collision*rate estimates. It is interesting to note that the efficiency of the optimized procedure is higherthan that in the procedure without splitting by a factor of about, ten, i.e., the increase in theefficiency of reaction rate estimation is still larger than that in leakage eCifi
486 <strong>Monte</strong> <strong>Carlo</strong> Panicle <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationsin the system <strong>and</strong> a rough fitting gives the approximate functional formN 1= N 0exp| -X(X 1+ x,_,y2]with X ~- 0.14. With this exponential drop in the collision density, the approximate importancesof the simple model follow from Equation (7.77) asi, = OCXp[O-Id(X 14 x,..,)/2]The relative quality factors obtained by using these importance values are 0,32 for theleakage estimate <strong>and</strong> 0.27 for the collision-rate estimate. Accordingly, the splitting gamewith the simple exponential importance factor increases the efficiency by a factor of aboutfive for the leakage estimation <strong>and</strong> about nine for the collision-rate estimation. This meansthat the method proposed in Section B is almost as efficient as the more detailed continuoussplitting model <strong>and</strong> therefore, whenever no drastic deviation from the exponential drop ofthe flux is expected, its use is very effective,G. THE WElGHT-WINDOW TECHNIQUEThe optimization methods presented in the previous sections are intended mainly formaximization of the efficiency of splitting in calculations of particle penetration throughlaminar geometrical structures. With more complex systems, no rigorous analytical methodof optimization is available, whereas many practical shielding problems involve the calculationof particle current through, complex bent ducts or other complicated geometrical forms.With proper biasing of the transition <strong>and</strong> collision kernels, the number of simulation particlespropagating through the important regions may be increased. However, such biasings usuallyresult in statistical weights of very different magnitude which, in turn, yield large fluctuationsin the particles' scores.An obvious way of getting over this difficulty is the use of regionwise splitting <strong>and</strong>Russian roulette. Dividing the domain of simulation into a number of regions (cells) <strong>and</strong>assigning importances to each region, the importance-related splitting <strong>and</strong> Russian rouletteprocedure (cf. Section A) makes the weights of the particles in a cell essentially uniform.It remains, however, to define appropriate region importances. If 1, denotes the importanceof region i, then, according to Equation (7.56), the weights of the split particles in regioni will be aboutW 1-W„/I,where W 11is a given value, e.g., the weight of the starters. Now, assume that the regionsare small enough so that the expected score due to a unit-weight starter in region i is aboutM;. Now if the weights of the split fragments, W, in region i are such thatW 1M 1— const.for every i, i.e., if the split fragments have approximately tiie same future score in everyregion, then obviously the variance of the final score will be low. Hence, it is reasonableto choose the importances according toI 1= const. • M 1There are two problems to solve in practical applications of the method. First, the domainof simulation must be divided into sufficiently small regions such that the expected score
487due to a starter in a region is approximately the same every t-t« < Ir he ' < ithe regionwise expected scores (or importances) are to be i 1» , i > >ptJ • » {if ,the construction of the procedure goes as follows. First, it l>> . •i ui f i . dinto regions by guesswork (common sense or practice) an> „ < >» , « » i.importances (scores) are generated. Next, if importance > i t< i •ferent, some of the regions must be divided further to oVa a < I r >of the importances. Test results show that an experienced)estimates in a few trial runs. 2The original idea of regionwise importance-directed 1 nirt rw nl' • i->either splitting or Russian roulette to virtually every part.J •I « »i t I •» uprobability that a particle entering region i has a weight ij i ,o ' s p > t ti'the other h<strong>and</strong>, we have seen in simplified examples thai d * fi .U 1WJ il ru,> d I tnot very sensitive to small variations of the region imjparticles in the regions). Therefore, it seems expedient noentering a region if they are close to the optimum weijregionwise weight windows instead of sharp weight valu* v K*H • r I i > ian upper <strong>and</strong> a lower weight value, <strong>and</strong> a particle is sp«" i i v • ivalue <strong>and</strong> Russian rouletted if the particle's weight is beio* tht-S \/t- *jit>e t f i r ,weight is between the two values, the particle is left unchanged.In the weight-window technique as originally proposed by Bootlare inversely proportional to the region importances <strong>and</strong> their setting ntruns for determination of the importance values (expected scores from thproposes a self-learning scheme with continuously updated window vtwo methods was reported to yield a considerable increase in efficienbe improved further by estimating space-energy- or space-energy-diiecuon-aepenueni auportances<strong>and</strong> by parallel use of the exponential transformation.'III. OPTIMIZATION OF PATH STRETCHINGPath stretching (also called track-length biasing, path-length biasing, or track-lengthstretching) is a very powerful but also dangerous tool of variance reduction. As was brieflydiscussed in Section 5. V.E, the procedure is intended to enhance particle flights In a preferreddirection(s). Qualitative properties of the procedure have been investigated in Section 7.PB<strong>and</strong> we have seen that ill-considered use of path stretching (e.g., too high values of thepath-stretching parameter) may yield unrealistic estimates with seemingly low variancebecause of an insufficient sampling of the biased transition kernel (e.g., short flights occusvery seldom). Therefore, we concluded that it is safer to minimize the theoretical varianceofthe estimate as a function of the path-stretching parameter (function) than to maximizethe efficiency of the simulation. Minimization of the variance will provide us with safevalues of the optimized quantities in the sense that they will represent a milder biasing (theywill be closer to the unbiased case) than the most efficient ones. Therefore, schemesapproximating a zero-variance scheme will be presented in this Chapter.A zero-variance scheme is obviously the best of all possible schemes, <strong>and</strong> if it can beapproximated in a practically feasible way, then the problem of optimization can be considered solved. Practical elaboration of such an approximate scheme is, however, not alwaysan easy task. A large number of communications have been devoted to a partial solution ofpractical optimization which concentrates on one or another specific aspect of the procedure.The early results comprise a large amount of knowledge <strong>and</strong> experience, <strong>and</strong> therefore ;;short review of the history of the optimization of path stretching (<strong>and</strong> related methods) maybe of interest to the reader.It has been demonstrated in Chapter 5 V that importance sampling, exponential trans-
488 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationsformation, <strong>and</strong> path stretching are very closely related. This is why early investigations ofoptimized schemes have been carried out in parallel, started from all three methods. Deeppenetrationimportance sampling was first proposed by Kaios, 25including also a directionaldependentpath-stretchmg game. The underlying theory <strong>and</strong> a practically feasible importance -sampling method is presented by Burgait <strong>and</strong> Stevens 5in which the adjoint particle flux(<strong>and</strong> thus the functions in the importance sampling) is obtained from simple, discrete ordinatecalculations. The importance-sampled collision kernel is concentrated in discrete directions.The importance sampling line was further developed by Lanore, 27 - 28who determined a quasioptimumpath-stretchmg parameter as the solution of a Placzek equation, <strong>and</strong> by Tang etal., 49 - 5 " who proposed a biasing scheme near the theoretical optimum, although no varianceanalysis supports the derivations.The concept of the exponential transformation, like so many ideas in the <strong>Monte</strong> <strong>Carlo</strong>methods, was first proposed by Kahn, 23,24the great poineer of <strong>Monte</strong> <strong>Carlo</strong> theory. Leimdorferapplied the method to deep-penetration shielding calculations. 31 - 32He also noted <strong>and</strong>solved some of the practical difficulties associated with the use of path stretching. Clark 7gave a theoretical review of the method with a collection of numerical results available atthe time.Importance sampling <strong>and</strong> exponential biasing involve the alteration of not only thetransition kernel, but also the collision kernel. Parallel to the investigations mentioned above,a great amount of effort was invested in the derivation of efficient schemes with the alterationof the transition kernel only. (We have seen in Chapter 5.V that the practical differencebetween the two simulation concepts is merely that in the former case, biased collisionkernels compensate for the bias in the transition kernel, whereas in the "pure path stretching''concept, this compensation is performed by statistical weights.) In all pure path-stretchingschemes, the probability density of a free-flight length € in a homogeneous medium isT(€) = |1 - b(p,)]crexp{--[l - b(p.)]rj€} (7.129)where p, is the cosine of the angle between the direction of the flight <strong>and</strong> the preferreddirection, <strong>and</strong> b(jx) is the biasing function. Lewitt 29 - 30 <strong>and</strong> Karcher et al. 22 tried to optimizea stepwise direction-independent path-stretching parameter by requiring that the statisticalweight of a particle traveling one mean free path in the biased game remain approximatelyunaltered. Stepwise direction independence means that path stretching with a constant parameteris applied if the particle approaches the detector region, <strong>and</strong> no path stretching isapplied if the particle is moving toward the source region. Thus, the biasing function intransmission through a slab isififPonti 44compared this scheme to another, more explicitly direction-dependent scheme inwhich the biasing function isb(fx) = b • pwith a constant b. This linear scheme was analytically optimized in simplified cases bySpanier 47 - 4 * <strong>and</strong> Bending. 1 Ragheb 45 proposes an in-code optimization of the game in acorrelated game where the different correlated particles are subject to different path-lengthbiasing. The work by Dubi <strong>and</strong> Dudziak 8is worth mentioning as pioneers of the directstatistical approach. They optimize a direction-independent path-stretching scheme on thebasis of small -sample estimates of certain bulk parameters. Murthy proposed a new form
489of the directional dependence 41ash(fx)<strong>and</strong> compared it to the previous schemes in <strong>Monte</strong> CaCaIcUIaIiOnS/ 11introduction of the moment equations gave path-' » >. • • >Sarkar <strong>and</strong> Prasad 46investigated various exponentproximately optimum path-stretching parameters. 2.(cf. Section 5. VI11. A) opened the way to practicgames 12 - 17 ' 39 <strong>and</strong> lead to new, approximately optimum .en , i »s> , •4The circle is closed here. We are back to impo't.ni. i..w,..< > t\ ,•! .basis of a different type of zero-variance scheme. ",discussion of this method.Zero-variance path-stretching schemes are deriv. I < , , ' i -< >Practical applications of the schemes, based on appidirect statistical approach, are demonstrated in Section I M .. •i ,the path-stretching procedure are discussed in Section D.A. ZERO-VARIANCE PATH-STRETCHING SCHILet us consider a closed, simply connected region V ;the number of particles escaping from V due to a sourmation), We establish here an exponential transformedzero variance. In the derivation below, we restrict ourselwhich score on free flights only, i.e., no separate score >. a I i !.hi .f a(P') = f s(P',P") = f n(P',P") == O<strong>and</strong> only f(P,P') is nonvanishing in the moment equation (5.80). Then the expected scor«in a flight started from a phase-space point P = (r,G>,E) is(7.130)where P b= (r b,*>,E) is a phase-space point with the spof V that is situated in the direction to from r. The int in I, t ,(5.32)]. Thus, omitting the delta functionsT(P,P')dP' rr(P')exp{- T(P,P')}dD (7.1with(7 132)the optical distance between P <strong>and</strong> P', <strong>and</strong>P' = (r',«,E), D = r' ri (7.133)The expected total score due to a starter from P satisfies the by-now-familiar first-moment
490 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> CalculationsEquation (5.80):M 1(P) = I 1(P) + J rPn dP'T(P,P')jdP"C(P',P")M,(P") (7.134)where, according to Equations (7.130) through (7.132)I 1(P) = exp[-T(P 1P 1,)] (7.135)Let us now recall the steps in Capter 5.V.D that lead to an unbiased exponential transformedgame. The expected score, M 1(P), in the transformed game is obtained from the analogmoment by the transformationTl 1(P) = expj WP)]M ,(P) (7.136)where b(P) is the path-stretching function to be chosen such that the second moment of thescore is minimum. As is shown in Chapter 5.V.D, the transformed transition <strong>and</strong> collisionkernels in an unbiased transformed game take on the formst(P,P') = rx(P')exp[b(P) -b(P')]T(P,P')/cr(P')= o-(P')expi>T(P,P')J (7.137)<strong>and</strong>C(P',P") - o-(P')explb(P') - b(P")]C(P',P")/o-(P') (7.138)wherecr(P) = o-(P) + w Vb(P) (7.139)is the stretched cross section. Now, according to Equation (5.165), the transformed momentsatisfies the equationM 1(P) = SC 1(P) + |dP't(P,P')[dP"C(P',P")i1,(P") (7.140)whereSy(P) == exp[b(P)]I,(P) (7,141)<strong>and</strong> I 1(P) is the analog first-flight score in Equation (7.135). Let us now assume that thepath-stretching function b(P) vanishes at the boundary of V for directions pointing outward,i.e., letb(P b) = 0 for ton, s 0where n bis the outer normal of V at r„. Then Equation (7.141) with Equation (7.135) reads9F 1(P) = expLb(P)]exp["T(P,P')] = exp[ - T(P,P')]
49!whereT(P,P') = j dto-sr 4 to,R)the optica! distance between P <strong>and</strong> P' in a medium where the total cross section is equal tothe stretched cross section. Thus, the transformed moment Equation (7.140) becomes/Ji 1(P) - cxp| -T(P 1P')] -F dP'f(P.P4!dP''C(P',P'').4{ !(P''iin perfect analogy to the analog Equations (7.134) <strong>and</strong> (' ">i !* n > '.game is to be played just like any analog game, but the ^ i , L. ' Au , ^ i >selected from the kernels T <strong>and</strong> C in Equations (7.137) jud . ' I i ,. >1I A< . i \ ,estimators yield the same expected first-flight <strong>and</strong> fin J • .estimators, however, yield different variances. Heieestimators. First, a zero-variance scheme with a IaA fv . t. ~ t nequivalent scheme with the expectation estimator is e- ! Hj,, - 1Assume that only those flights contribute to the note ih •i" » ii.e., the score assigned to a flight from P to P' isF(P 1P')1 if PEV, P' A V0, otherwise(7.143)This type of leakage estimator is the most oi \H-U* i,. i i >, > am.follows from Equations (5.81) or (5.59) as.AT 2(P) = expf-T(P,PJ] + J dP'T(P,P') J dP"C(P'.,P"),M. 2(P") (7 'AANote that Equations (7.142) <strong>and</strong> (7.144) are identical, i.e., they have the same solutionH 2(P) =M.mThe equality is heuristically obvious since the final transformed score is either zero or one
492 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> CalculationsThe variance of the score due to a particle that starts from P is9 2 (P) = Ji 2(P) - JiO(P) = M 1(P)[I - M 1(P)]<strong>and</strong> evidently the variance is zero if .M 1(P) « 1. Taking note of Equation (7.136), thisequality holds ifexp| -b(P)] = M 1(P)Hence, the optimum path-stretching function, which results in zero variance with the lasteventestimator, isb(P) = -log EM,(P) (7.145)where M 1(P) is the expected score due to a particle started from P in the analog game. Notethat M 1(P 1,) = j at the boundary of V for outgoing directions (the probability of the leakageis unity) <strong>and</strong> thus b(P B) = 0, as required. In view of Equations (7.137) through (7.139),we have the following theorem.Theorem 7.1 — An exponential transformed game has zero variance if the last-eventestimator is used <strong>and</strong> the path-stretching function satisfies Equation (7.145), i.e., if thestretched cross section isCF(P) = a(P) - CdVlOg 6M 1(P) (7.146)the transition kernel has the formT(P,P') -- T(P 5POCT(POM 1(POZO-(POM 1(P) (7.147)<strong>and</strong> the collision kernel isC(P',F') = C(POrXPOM 1(FVo-(POM 1(PO (7.148)•The source density in a zero-variance game follows from Equations (7.143) <strong>and</strong> (7.145) asQ(P) =Q(P)M 1(P)At this point, the reader may have the impression that the scheme proposed here doesnot fit into the general form of the zero-variance, partially unbiased game derived in Section5. VIII. A <strong>and</strong> may suspect that something went wrong in the derivation. Although the kernelsin Equations (7.147) <strong>and</strong> (7.148) seem to be very different from those in Equations (5.288)through (5.290), in fact, they are special cases of the latter ones, as demonstrated below.Let us consider the following identity.(T(POM 1(POMP') = [cr(P') - WVlOg 0M 1(PO]M 1(POZCr(PO= M 1(P') - [WVM 1(PO]Z(T(PO = e T l p - n wV[e ^'M 1(PO]ZCT(P')which holds for any point P with x(P,P') given in Equation (7.132). Let us now multiply
493both sides of the equality byT(P,P') = a(P')e- T ( P - p , )<strong>and</strong> integrate with respect to P' from P to infinity along *(P') (7.149)where i|/*(P) is the adjoint collision density. Hence, the optimum transformed kernels inEquations (7.147) <strong>and</strong> (7.148) can be rewritten ast(P,P') = T(P.P')ili*(P')ZM,(P)= T(P 5PoJdPT(POr)M 1(F)ZM 1(P) for P'eV (7.150)<strong>and</strong>C(P,P') -C(P,P')M 1(P")Z4/*(P')= C(POF)M 1(P') j JdFC(P',F)M 1(F) (7.151)The second equalities follow from the adjoint integral transport equation (5.9):i|/*(P) = f(P) + JdP'C(P,P')JdP''T(P',P'')i|/*(P'') = f(P) + JdP'C(P,P')M,(P')<strong>and</strong> from the fact that f(P), the weighting function in the escape rate, is zero inside V, i.e.,4>*(P) = JdPT(P 5POM 1(P') if P'eV (7.152)Now, comparing the kernels in Equation (7.150) <strong>and</strong> (7.151) to the general zero-variancekernels derived in Section 5.VIII.A, the mutual correspondance is obvious.We note that the kernels in Equations (7.150) <strong>and</strong> (7.151) are equivalent to those inEquations (7.146) <strong>and</strong> (7.147) if the exact expected score, M 1(P), is used in the formulas.In the case of approximations to the optimum formulas, however, they will not be equivalentany more, as will be seen in Section B.As always happens with a zero-variance scheme, its realization assumes knowledge ofthe quantity to be estimated. Therefore, a game with exactly zero variance is never feasiblein practice; nevertheless, approximations to the optimum schemes may lead to substantialvariance reduction. Practical realizations will be considered in Section C.The scheme above was derived under the assumption that the last-event estimator isapplied. Zero-variance schemes with a general estimation procedure were derived in Section5. VIII.A, <strong>and</strong> we mentioned there that although two ideal schemes with different estimatorsare equivalent from the point of view of efficiency, the efficiencies of their approximate
494 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationsrealizations may be different. Therefore, it may be useful to introduce zero-variance pathstretchingschemes with estimators different from the last-event estimator. In what follows,we introduce a scheme with the expectation estimator.The contribution of a flight from a point P is then equal to the expected first flight score,I 1(P), in Equation (7.135), i.e.,f(P,P') =I 1(P)A zero-variance scheme follows directly from the general form derived in Section 5.VlITA.Inserting the expectation estimator above into the general Equation (5.288), the transformedtransition kernel readsT(P 1P') - T(P,P')[Ij(P) + JdP"C(P',P")M 1(P")]/M 1(P) (7.153)Introducing again the adjoint collision density, two equivalent forms of the transition kernelfollow from Equations (7.149), (7.150), <strong>and</strong> (7.152) asf(P,P') - T(P,P')[I,(P) + ^(POJ/MXP) - T ( p ' p ') (7.154)The transformed collision kernel in a general zero-variance scheme is given in Equation(5.290), <strong>and</strong> it is seen that the collision kernel is independent of the contribution function.Thus, in the zero-variance leakage estimation, this kernel is the same as the one given inEquation (7.148) or (7.151) for both the last-event <strong>and</strong> expectation estimators.There is one point to be emphasized here. The scheme with the expectation estimatoras derived above is not an exponential transformed game. This is seen from Equations(7.153) <strong>and</strong> (7.154) since the terms multiplying the analog transition kernel on the RHS ofthe equations do not factorize to functions depending separately on P <strong>and</strong> P', respectively,<strong>and</strong> therefore T(P,P') in these equations does not conform to the exponential transformed(or importance-sampling) form of Equation (7.137). Therefore, realization of the scheme(if it were possible at all) would only be practicable by the use of a nonanalog simulation<strong>and</strong> statistical weights. Nevertheless, approximately optimum path stretching can also bedefined with an expectation estimator, as will be discussed in the next section.B. DISCUSSION OI THE SCHEMESBefore turning to practical realizations, we shall briefly discuss some specific propertiesof the schemes above.Let us first note that the probability of an absorption is zero in both schemes, i.e., thetransformed collision kernel is normalized to unity:JdFC(P',F') - 1This is a common property of all partially unbiased zero-variance schemes, as pointed outin Section 5. VIII.A. Unit survival probability is reached by transformation of the collisionkernel. This particular property of a nonanalog game can also be produced by survivalbiasing (cf. Section 5.VIII.D). In this case, the nonanalog collision kernel isC(P',F) = C(P',F) /dP"C(P',P")
495Comparing this kernel to the transformed one in Equation {7,151), we see that whensurvival biasing, the optimum kernel is approximated by puttingM.V/%dP"C(P',P")M,(P") /M 1(P") = dP"C(P',P")Besides survival biasing, however, the transformed collision kernel aiso differs from theanalog one in its direction-energy dependence, <strong>and</strong> it is this specific biasing that makes RH;simulation of a scattering very efficient from the point of view of the final estimate Hctrristically,the biasing emphasizes directions <strong>and</strong> energies where targe contributions to thescore are expected [i.e., where M 1(P") is large). Recall that path stretching in a strict sensemeansthe alteration of the transition kernel only (with a possible survival biasing). Thezero-variance scheme above suggests that parallel alteration of both kernels may result ina more efficient simulation than path stretching alone.X2A3- 2 " A " J -' MThe transition kernel in the first scheme [Equations (7.147) <strong>and</strong> (7.150)] defines a pathstretching procedure with the stretched cross section or in Equations (7.139) <strong>and</strong> (7.146).The simplest path-stretching schemes mentioned in Section 7.I.B <strong>and</strong> in Equation (7.129)are special cases of this general form. Also, special cases concerning transmission throughslabs were introduced in Sections 5.V.D <strong>and</strong> E. It was shown that the general form of thestretched cross section in slab geometry isdO-(X,(JL,E) = o-(x.E) 4- p, — b(x,jx,E) (7.155)dxIn most practical path-stretching applications, the stretching function is chosen asf x dx' b(a,E)b(x,(ju,E) = b(|x,E) —cr(x',E) = — --- T(X,X) (7.156)where X is the x coordinate of the boundary of the system to be traversed <strong>and</strong> T(X.X) is theoptical distance from x to X along the x axis. Then the stretched cross section becomesCT(X,(X,E) = CT(X,E)[1 - b(|A,E)] (7.157)The simple examples mentioned in the introduction of this Chapter are special cases of thisform. For example, the stepwise directionally independent scheme by Lewitt 2b (^E) = ;{o if p.
496 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationsscheme, the path-stretching function <strong>and</strong> the expected score are related asd\x — 1Og 6M 1(X 5Pi 5E) - cr(x,p,)b(u,,E)dxi.e., the expected score (leakage rate) due to a particle started from P = (x,u,,E) has theformM,(x,p,,E) = expj- T(X,X) j (7.158)In practice, Equation (7.158) never holds exactly, but sometimes the expected score can beapproximated fairly well by a function of this form.As an example, we recall that in the straight-ahead scattering model, Equation (7.158)holds <strong>and</strong> therefore the specific form of path stretching in Equation (7.157) together withthe survival biasing were seen to yield a zero-variance scheme (cf. Section 7.I.B). Morerealistic approximate schemes are introduced in the next section.The results above also justify the aproximate optimization discussed in Section 7.1. D.There we assumed that with some constant value X, the expected score could be written asM,(x,p,,E) = Ae- M X " x ) (7.159)<strong>and</strong> we choserj(x,u,,E) — CT(X,E) - XfX (7.160)Obviously, this choice corresponds to the approximationb(p,,E) T(x,X) =X(X-x)or, equivalentlyor(x,E)b(p.,E) ~ X(XNow, accepting the approximate form of the expected score in Equation (7.159), the optimumcollision kernel follows from Equation (7.151) asC(P',F') - C(P',F') / dP"C(P',P") (7.161)i.e., approximation (7.159) calls forth an optimized game where simple survival biasingrepresents the alteration of the collision kernel.The arguments above explain the success of schemes that apply pure path stretchingwith survival biasing, but no angular biasing, of the collision kernel. 22 ' 2930 - 43 ' 47Note, however,the little trick involved when introducing Equation (7.161) on the basis of Equations(7.159) <strong>and</strong> (7.151). Indeed, if the approximation in Equation (7.159) to the expected scoreis accepted, then the stretched cross section in Equation (7.160) does follow from Theorem7.1. However, the corresponding collision kernel should be derived from Equation (7.148),not Equation (7.151), since Equations (7.148) <strong>and</strong> (7.151) are equivalent only if the exact
497expected score is put into the formulas. Using Equation (7.148), we obtainC(P',F) = C(P',P")o-(P')/[o-(P') - Xu,] (7.162)Although this form of the biased collision kernel conforms with Theorem 7.1, it seems tobe less favorable than the simple survival-biased kernel for two reasons. First, its dependenceon the postcollision coordinates is not altered, compared to the analog kernel. Second, thenumber of secondaries per collision is not unity, while both these requirements are essentialin a zero-variance scheme. Approximate collision kernels possessing these properties willbe introduced in the next section.Recall that the approximate optimum path-stretching scheme in Equation (7.160) wasderived in Section 7.1.1.) under the heuristically founded assumption that the path-stretchingprocedure is optimum if the transformed moment M 1(P) is independent of the position ofthe starter. As was seen in the derivation of the first scheme in the previous section, theheuristic assumption is justified; the zero-variance scheme defines a transformed game withM 1(P) - 1.When we introduced the zero-variance scheme with the expectation estimator (secondscheme in the previous section) we pointed out that this scheme does not define a real pathstretchingprocedure since the biasing factor in the transition kernel, Equation (7.153), hasthe form[I 1(P) + JdP"C(P',P")M 1(P")]/M,(P)which cannot be written in the general path-stretching biasing formcr(P') exp[b(P) -b(P')]/cr(P')[cf. Equation (7.138)]. This fact might suggest that the expectation estimator, when usedin approximate optimum path-stretching games, would be less efficient for leakage estimationsthan the last-event estimator. Although in certain cases it is indeed so, it has beenshown that for medium <strong>and</strong> strong absorption, the expectation estimator is definitely competitive.17Approximate optimum realizations of path stretching with expectation estimators arebased on the observation that in the case of deep penetration, the first-flight score is considerablysmaller than the total expected score, <strong>and</strong> thereforeI 1(P) «JdP"C(P',P")M,(P")since the RFIS is the expected total score due to a particle emerging from a collision at P'after a flight from P to P'. With this approximation, the biasing factor of the transitionkernel will beJdP"C(P',P')M 1(F')/M,(P)for both schemes (with the last-event <strong>and</strong> expectation estimators), i.e., either estimatorhe used in the same approximately optimum path-stretched game.canC PRACTICAL APPLICATIONS IN DEEP-PENETRATION CALCULATIONSWhen optimizing the path-stretching procedure, one tries to realize the zero-variancescheme derived in Section A. This is done by using appropriate approximate expressions
498 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationsfor the expected score that appears in Equations (7.146) through (7.148). For one-dimensionaldeep-penetration problems, the simplest solution was mentioned in Section B. It consists ofdetermining an approximate exponential drop of the expected score [cf. Equation (7.159)),<strong>and</strong> the stretched cross section is expressed with the aid of the exponent [Equation (7.160)].We have seen, however, in the previous section that a biasing of the form in Equation(7.161) or (7.162) of the collision kernel does not affect the selection of the postcollisioncoordinates, whereas a collision kernel enhanced in the preferred direction is expected toincrease the efficiency. Approximate optimum schemes with angular biasing are introducedin this section.An approximate analytical expression of the deep-penetration expected leakage wasproposed by Dwivedi. 13In this approximation, the optimum biasing parameter is determinedfrom the solution of a homogeneous, monoenergetic isotropic moment equation. The materialconstants of the equation are chosen such that the transmission rates through the real <strong>and</strong>homogeneous systems are equal.Let us first consider a homogeneous slab between x = 0 <strong>and</strong> x = X, <strong>and</strong> let the quantityto be estimated again be the number of particles transmitted through the slab from x = 0to x = X in a monoenergetic isotropic transport. Let M,(x,p4 denote the expected score(number of transmitted particles) due to a starter from x in a direction p, (where p, is thecosine of the angle between the particle direction <strong>and</strong> the x axis). The first-moment equationin this problem readswhereM,(x,fx) = Q(ii)e-" (X^ + I d x ' - e f du/M,(x',u/) (7.163)Jo p, 2 J-i~ TO if fx < 0c is the survival probability, <strong>and</strong> or is the total cross section of the slab. This equation isanalogous to the integral form of the one-dimensional transport equation for monoenergeticparticles, <strong>and</strong>, sufficiently far from the source plane x = 0, it has the solution 6,1318M 1(X,|x) = A4) b(fx)e bCT(x - x) + BcM|Jd)e F C T < x - x ) (7.164)where b <strong>and</strong> b satisfy the Placzek equationc2B l 0 8
499The constant A follows from the condition that the total expected score due to a particlestarted from x = X in a positive direction is unity, i.e., (for isotropic scattering)j o dp,M,(X,jx) = 1which yields A =1.By inserting Equation (7.167) into the optimum biased functions inEquations (7.146) <strong>and</strong> (7.151), we obtain the stretched cross section aso- = CT(I - bp,) (7.168)<strong>and</strong> the biased collision kernel asC(M,- u/|x) = UW) = ^ T - = V T ^ 169)2 1 — bp, 2cr(fx )Note that although C is proportional to c, the survival probability, it is normalized to unitysincec 1 + bJ ^ix'Qjx -- |x'|x) = ^ iog e1 - bfor b satisfies the Placzek Equation (7.165). If Q(x,p.) denotes the analog source density,then the transformed source density follows from Equation (7.143) asQ(x,p7) = e tofr - x >Q(x,p,)cb b(p.) (7.170)The scheme defined by Equations (7.168) through (7.170) can only be applied forhomogeneous, monoenergetic isotropic transport. With heterogeneous <strong>and</strong>/or energy-dependentproblems, the cross section cr <strong>and</strong> the survival probability c depend on the position <strong>and</strong>energy of the particle. Therefore, the asymptotic solution in Equation (7.167) of the momentequation does not apply directly to such cases. Approximate optimization of the pathstretchingparameter can be obtained by this method e.g., by requiring that the leakagedetermined by Equation (7.167) with some homogenized material constants be equal to theestimated (i.e., real) leakage rate. Thus, in the case of the isotropic unit source at x = 0,i.e., ifQ(x,|x,E) = 8(x)Q E(E);jxeJO,]]a value (bcr) is to be chosen such that the homogeneous expectation in Equation (7,167)satisfies the equalityd UJVi 1(O,^) = M 1where M 1is a preliminary estimate of the leakage rate in the real system. Accordingly, werequire that
500 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationsi.e., that(ba) = - log eM,Then the stretched cross section becomescr(x,|x,E) = a(x,E) + ^ Iog eM, = a(x,E)[l - y.b(x,E)] (7.171)<strong>and</strong> this cross section defines a biased transition kernel of the formT(x -» x'|u.,E) = cr(x,|x,E)exp dta(t,|x,E)/|JLThe transformed collision kernel can, for example, be written by analogy to that in Equation(7.169) as*C(p,,E-> (x',E'|x') = C 1(E - E'|x» c(x',E')a(x',E')2 cr(x',p7,E)(7.172)whereC E(E -> E'[x',|x) = J d(x'C(|x,E-> u/,E'|x') jJ djEjdE'Q>,E -> JJL',E'|X') (7.1 7 3)i.e., C 1, is the analog density function of the postcollision energy <strong>and</strong> c(x,E') is a normalizationfactor:withc(x,E)l- f' du/ . C T ( X 3 )2 J-1 CT(X,(X',E).2b(x,E)/log1 + b(x,E)e1 - b(x,E)_(7.174)b(x.E) = -1Og^f 1Z[Xa(X.E)] (7.175)According to Equation (7.170), the source density is also to be biased <strong>and</strong> its normalized* Notice that this form of the kernel is independent of the postcollision direction distribution of the analog kernel.This makes the normalization factor! a|V ,E) very simple, <strong>and</strong> the scattering properties of the analog kernel arethen reflected by the statistical weight of the particle (cf. Theorem 7.2). An alternative form of the transformedcollision kernel, which is more closely related to the analog scattering law, might bewithC((X,E-H. u/,E'[x') = C((J.,E-» h,',E'|X')C(X')O-(X',E')/CT(X',(JI',E')c(x') =dp/ dE'C(|X,E -> (x',E'jx')cr(x',E')/cr(x',|jL',E')The calculation of the factor c(x'), however, may be rather troublesome in case of anisotropic scattering.-'This makes the latter form of the kernel less attractive than the one in Equation (7.172).
SOlform isQ(x,|x,E)8(x)Q E(E)1 cx(x,E)q(x,E) rr(x,fx,E)(7.176)whereq(x,E) dp, —o(x,E) logjl - b(x,E)]a(x,(x,E) b(x,E)The main advantage of the scheme in Equations (7.171) through (7.176) over conventionalpure path-stretching strategies is that it also involves directional biasing of the scattering<strong>and</strong> source, thus enhancing the preferred direction not only in flights, but also in the selectionof the flight direction. Let us emphasize that this scheme is only an approximation of theoptimum transformed kernels derived in Section A <strong>and</strong>, as such, it does not define anexponential transformed game. Therefore, the game is necessarily played nonanalog withthe use of statistical weights according to the weight-generation rules in Section 5.V.B. Thestatistical weights corresponding to this path-stretching game are detailed in Theorem 7.2below. I For the sake of completeness, we note that by setting b(x,E) equal to a constantvalue, the scheme may be rewritten in the form of an exponential transformed game, 16although usually less effectively than the one with the space-energy dependent b].Two practical comments are proper here. First, it is seen that the collision kernel inEquation (7.172) <strong>and</strong> the source density in Equation (7.176) contain the factor co72a, whichdepends on the energy argument to be selected from the densities. Therefore, one mightthink that the selection of the postcollision energy would become more complicated becauseof the biasing factor. This, however, is not the case since this factor is normalized to unityin its angular variable p/. Thus, the postcollision energy is invariantly selected from themarginal density C 1in Equation (7.173), <strong>and</strong> the postcollision direction is then drawn fromthe conditional density ca72cr. Similarly, the starting energy is selected from Q 1<strong>and</strong> thedirection from the biasing factor. Second, although the above scheme was derived assuminga fixed value of the escape rate M 1obtained from a preliminary run, this value may, ofcourse, be updated during a production run <strong>and</strong> the biasing factors may then be recalculatedfrom more <strong>and</strong> more reliable estimates.Finally, we note that the above procedure is easily generalized to energy-dependentbiasing. Indeed, if the approximate first moment M 1is estimated as a function of the energy(i.e., in several energy groups), then the stretched cross section in Equation (7.171) becomeswhereas all the formulas following from it remain unchanged.Test calculations demonstrate that the angular biased scheme above may increase theefficiency of the estimation by as much as two orders of magnitude, compared to theefficiency of a pure path-stretching game. 1 3 1 8Two alternatives to the approximate method above are worth mentioning. In the firstmethod, an approximate exponential drop of M 1(x) again determines the biasing parameter.In particular, let us assume that the expected score due to a particle started from x is estimated<strong>and</strong> found to have the functional formM 1(X) = e K ( x - X )
502 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> CalculationsThen we set the space-dependent parts of the expected scores in the homogeneous <strong>and</strong> realsystems equal to each other (instead of requiring the equality of the leakage rates, as in theprevious approach). Thend|xM,(x,p,) =M,(x)i.e.which yields the biasing parameter asber = AThen the stretched cross section has the form
In all the approximations above, the stretched cross section is expressed asa(x,|A,E) = cr(x,E)[ 1 — FXB(X,E)Lwhere b(x,E) is one of the quantities in Equation (7.175), (7.178), or (7.181)transition kernel then has the formT(x -> xV.E) = 7-7 cr(x',fx,E)expj - J dta(t,E)[I -- u.b(t.E)l/(jiS-T(x —» x'|p,,E)| 1 - p,b(x',E)|exp dtb(t,E)rj(t,E) ( I . f C./where T(x -* x'||x,E) is the unbiased (analog) transition kernel. Assume that the analogcollision kernel is written in the formC(|x,E -» u2,E'jx') = c(x',E)CK(E -» E'|X',{JL)C P.((JL U.'JX'TLE') (74F)withdE'C E(E —» E'|x',|x) = J d|x'CJ>-> |x'|x',E,E') = 1This form of the collision kernel poses no limitation on the game since any collision kernelcan be written in the form of Equation (7.183). Indeed, by settingC E(E-» E'|x,(x) = Jdix'C(L*,,E -»• u7,E'jx)/c(x,E)<strong>and</strong>C^l -> p/|x,E,E') = C(|x,E~» u7,E'|x) j J du7C(p.,E u7,E'|x)we have the factorization in Equation (7.183). The biased kernel is given by Equation (7. ? 72)as, . I CT(X',E') , c(x' ,E')C(H 1E -+ |x',E'|x') = c(x',E')C E(E -> Ejx.FJL) - I7F7T7-7T = C t: t7.'[x.fx);2 a(x',(i,',E')211 - M-'tKx'JE')'= C(^1Eix'.E'jx') —- C ( X ; E } , - lc(x',E)C|x((i-* m-IX'.E.E'J]2[1 —M- Kx ,E )J(7.184;Finally, let the analog source be written in the formQ(x,|x,E) = Q 0(X 5E)Q 1x(SxIx 5E)
504 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> CalculationswhereJ dfxQ|x(jx|x,E) = Jdx|dEQ„(x,E) = 1Then the biased source density follows from Equation (7.176) asQ(x,fx,E) - Q„(x,E){q(x,E)[l - b(x,E)]} _1- Q(x,E){q(x,E)[l 6(X 1E)]Q^JXIX 5E)}- (7.185)We have argued that the biased game is to be played nonanalog with statistical weights.The weights to be applied follow from the weight generation rules in Section 5.V.B <strong>and</strong>are summarized in the following theorem.Theorem 7.2 — In the path-stretched game described by the densities in Equations(7.182), (7.184), <strong>and</strong> (7.185), the weight of a starter at P = (x,(x,E) isW 11(P) = Q(x,tx,E)/Q(x,jx,E) = q(x,E)[l -b(x,E)]Q>|x,E)whereq(x,E) = - log c( 1 b(x,E)]/b(x,E)In a transition from P = (x,(x,E) to P' = (x',p,,E), the particle weight is multiplied byw(P,P') = T(x -> x'||x,E)/f(x -» x'|p.,E)exp - dtb(t,E)o-(t,E) [1 - fxb(x',E)]whereas in a collision from P' to P" =(X',JX',E'), the factor multiplying the weight isw c(P',P") = C(w..E -> U.',E'|X')/C(|JL,E-* |x',E'|x')= c(x',E)C 11(M- -» tx'|x',E,E')2[l - u/b(x',E')]/c(x',E')where, according to Equation (7.174)1 + b(x,E) _c(x,E) = 2b(x,E)/log e1 b(x,E).<strong>and</strong> b(x,E) is defined by one of the expressions in Equation (7.175), (7.178), or (7.181),depending on the approximation used.Note that it is not necessary to calculate the exponential term in the weight factor w(P,P')in every flight separately, but it is more economical to sum up the exponents during thehistory <strong>and</strong> calculate the exponential only once at the time the particle escapes.In order to obtain an impression of the mechanism of variance reduction by the scheme,
505let us determine explicitly the weight of a particle that leaves the domain of simulation. Letthe particle be started at P 0= (x 0,|x 0,E 0) <strong>and</strong> let the pre- <strong>and</strong> postcoliision coordinates ofthe i-th collision in the history be J = (x,, (X 1_ ,,E 1-i) <strong>and</strong> P 1= (X^1Ix 11E 1), respectively 0= 1, 2,..., n 4- 1), where x„ < X <strong>and</strong> x„t, ^ X. Then the weight of the escaping particleisW = W 1(P n)Hw(P 1. ,,PI)W 1XPJ 1P 1)W(P n^+1)Q 1X(XJX 01EJq(X 01E 1)[I -RX 0B(X o,E„)] Tlc(x„E,_,)C(X 11E 1)2C 1XfX 1..., —> IxJx 11E 1.,,E 1)* 1 - (XiIKx 1,E 1)11 —,—~—: exp,-1 1 (X 1^B(X 1,£,_,)Xdlb(t,E,_ JoXt 1E 1,) [1 — (X nS(X 11, j,E„)pNow, in a monoenergetic, homogeneous isotropic transport c = c, <strong>and</strong>W = q • e _1 " r]~1Og 0(I - b)/bThe above result has two interesting consequences. First, in this simple case, one maycompletely forget about statistical weights during the simulation, <strong>and</strong> the weight is to beintroduced in the last flight only. Thus, (he homogeneous, monoenergetic, isotropic versionof our scheme is analogous to an exponential transformed game. Second, since the mediumat x > X is irrelevant from the point of view of the simulation, one may assume that it isfilled with a black absorber of a very large cross section. Then X N + 1= X, <strong>and</strong>W = qe - bu(X - x„) (7.186)i.e., every particle that is transmitted from x Dto X reaches X with the same weight W. Itis tempting to attribute the low variance capability of the game to the fact that the contributionsof all the leaking particles are nearly equal (sometimes it is so stated in the literature);however, recall that the analog game has the same property (as every transmitted particlescores unity) <strong>and</strong> the latter seldom results in zero variance. In fact, uniform scores yieldlow variance only if the number of transmitted particles due to a starter does not fluctuateheavily, i.e., if an approximately constant number of particles reach X in every history.Now, if b is chosen such that the probability M 1of the transmission of an analog particlestarted from x Din a positive direction isM 1then the weight in Equation (7.186) is related to this probability asW = qM,On the other h<strong>and</strong>, if k denotes the expected number of particles transmitted in the biased
a ( X506 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationsgame (number of simulation particles), then the final score isM 1=kWi.e.,k = 1/qThe variance of the score in the biased game isD 2 = W 2 k(l - k) = Mfq 2 k(l - k) = M 2 (q - 1)In contrast, the expected number of particles transmitted in the analog game is M 1. eachhaving a weight of unity, <strong>and</strong> therefore the variance of the analog game isD 2 = M 1(I - M 1)The ratio of the two variances isD 2 /D 2 = M,(q - 1)/(1 - M 1) =e-~ ^ ~ 1for certain values of x <strong>and</strong> E. Now, if b is positive, then the kernels are nonphysical aroundthe preferred direction (p. ~ 1). At the same time, a second problem is faced in the oppositedirection, namely, the weights of the particles will strongly fluctuate. This can be demonstratedin the case of a homogeneous slab. In this case, the second moment of the weight
507factor in a flight is(w 2 ) = J dx'f(x -~ x'|n,E)w 2 (P,P')X(H)dx'[||x|(l - }xb)R 1 CXpL--(X(I + (xb)(x' - x)/p7]where X(u.) is the x coordinate of the boundary of the system in the direction p. iron: K.Now, for p. ~ — 1
508 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> CalculationsNaturally, the weight factor multiplying the weight of a particle in a real collision is alsoto be altered by inserting b s<strong>and</strong> C 5in place of b <strong>and</strong> c in Theorem 7.2. The particle weightis not changed in a delta scattering <strong>and</strong> is multiplied by w(P.P'), according to the theorem,in a flight between two real collisions at x <strong>and</strong> x'.Although delta scattering removes the problem of an undefined probability density, thestatistical weights still may become negative <strong>and</strong> also arbitrarily large in modulus becauseof the weight factor 1/(1 — |xb) associated with a transition. Also, delta scattering increasesthe number of collisions <strong>and</strong>, therefore, in unfortunate cases it may result in considerableloss of efficiency.The scheme may only be made safe from the above dangers by forcing the stretchedcross section to be always positive. In this method, the modified stretching function b sinEquation (7.188) also replaces b in the transition kernel whenever |b(x| 3= 1, <strong>and</strong> then thekernel readsf(x X'||A/E) = T(x x'|u.,E)[l • (xb 6(x',E)]exp dtb 6(t,E)cr(t,E)Using this kernel, every collision will be a real collision <strong>and</strong> will be played with the collisionkernel in Equations (7.189) <strong>and</strong> (7.190). Proceeding this way, we certainly depart from thequasi-optimum game in every case when |b(x| 1, <strong>and</strong> therefore deterioration of the efficiencyis expected. In practical problems, test calculations must determine the choice of onemethod or another.APPENDIX 7A:APPROXIMATE MOMENTS OF THE NUMBER OFTRANSMITTED PARTICLES THROUGH MULTILAYER SLABSAn approximate model of particle transport through slabs was introduced in Section7.II.B <strong>and</strong> the geometrical splitting procedure is optimized in the model. For the optimization,the first two moments of the number of particles transmitted through slab regions are to bedetermined.According to Equations (7.63) <strong>and</strong> (7.64), the probability P 1(Jk 1) that k, particles leaveregion i in a positive direction satisfies the recurrenceP,(k ;) = 2 2 ^VPCk 1IkI)P 1VV 1) (A.l)where the quantities appearing on the RHS are defined in Equations (7.60) through (7.62).Note that since the number of split fragments is bounded at any surface, the summationover V 1in Equation (A. 1) does not really extend to infinity (k, is certainly not greater thankj). Therefore, we can set the upper limit of the summation equal to k[. The quantities tobe determined are the r'th moment (r = 1, 2) of the number of particles:
509where, according to Equation (7.62)K, K|P.OO = E k)p(kjk;) = V k)(D;) !1•(I - td«Now, for the elementary properties of the binomial distributionp 0(k;) = I, p,(k|) - k|t, = (k,_,n, + j)t,<strong>and</strong>p 2(k[) = k;V + k;t,(i - Uwhere, from Equation (7.60), we havek[ = k,_ ,n, + jInserting this expression, together with that of TR(JJk 1.,) in Equation (7.61), into Equation(A.2), the moments become = 1= S t-,(K-n + K,.,V 1)P 1. ,(K,..,) = tMK-,) (A3)ki-i<strong>and</strong>KJ _ i J = O[(k 2^n| + 2k,.Aj + f)t 2 + (k,..,n, + J)I 1(I - I 1VJP 1.,(k,.,)= 2Wi k >-i( n i + 2n,v, E v 2 ) + ^.,V 1(I - V 1)k]-i+ t,(i - ^,.,^,.,(k,.,)= t 2 a 2 (k 2 _,) + [tj(l - t,)a, + tfv,(l - V 1)Kk 1.,) (A.4)REFERENCES1. Bending, R. C, Direction dependent exponential biassing, in Proc. NEACRP Meeting of a <strong>Monte</strong> <strong>Carlo</strong>Study Group, ANL-75-2 Report, Argonne National Laboratory, 1974, 295.2. Booth, T. E., Automatic importance estimation in forward <strong>Monte</strong> <strong>Carlo</strong>, Trans. Am. Nucl. Soc., 41, 308,1982.3. Booth, T. E. <strong>and</strong> Hendricks, J. S., Deep penetration by <strong>Monte</strong> <strong>Carlo</strong>, Trans. Am. Nucl. Soc. 43, 609,1982.4. Booth, T. E. <strong>and</strong> Hendricks, J. S., Importance estimation in forward <strong>Monte</strong> <strong>Carlo</strong> calculations, Nucl.Technol. Fusion, 5, 90, 1984.5. Burgart, C. E. <strong>and</strong> Stevens, P. N., A general method of importance sampling the angle of scattering in<strong>Monte</strong> <strong>Carlo</strong> calculations, Nucl. Sci. Eng.. 42, 306, 1970.
510 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculations6. Case, K. M. <strong>and</strong> Zweifel, P. F., Linear <strong>Transport</strong> Theory, Addison-Wesley, Reading, MA, 1967.7. Clark, F. H., The Exponential Transform as an Importance-Sampling Device — A Review, ORNL-RSIC-14 Report, Oak Ridge National Laboratory, 1966.8. Dubi, A. <strong>and</strong> Dudziak, D. J., Optimal choice of parameters for exponential biasing in <strong>Monte</strong> <strong>Carlo</strong>, Nuci.Sci. Eng., 70, 1, 1979.9. Dubi, A., et al., Geometrical splitting in <strong>Monte</strong> <strong>Carlo</strong>, Nuci. Sci. Eng., 80, 139, 1982.10. Dubi, A. <strong>and</strong> Dudziak, D. J., Extended model of geometrical surface splitting in <strong>Monte</strong> <strong>Carlo</strong>, Nuci. Sci.Eng., 83, 487, 1983.11. Dubi, A., General statistical model for geometrical splitting in <strong>Monte</strong> <strong>Carlo</strong>, Tr. Th. Stat. Phys.. 14, 167,195, 1985.12. Dwivedi, S. R., Zero variance biasing schemes for <strong>Monte</strong> <strong>Carlo</strong> calculations of neutron <strong>and</strong> radiationproblems, Nuci. Sci. Eng., 80, 172, 1982.13. Dwivedi, S. R., A new importance biasing scheme for deep-penetration <strong>Monte</strong> <strong>Carlo</strong>, Ann. Nuci. Energy,9. 359, 1982.14. Ermakov, S. M. <strong>and</strong> Mikhailov, G. A., Course of Statistical Modelling, Nauka, Moscow, 1976 (inRussian).15. Everett, C J. <strong>and</strong> Cashwell, E. D., Cost of Splitting in <strong>Monte</strong> <strong>Carlo</strong> <strong>Transport</strong>, LA-7189-MS Report,Los Alamos Scientific Laboratory, 1978.16. Goertzel, G. <strong>and</strong> Kalos, M. H., <strong>Monte</strong> <strong>Carlo</strong> methods in transport problems, in Progress in NuclearEnergy, Series I, Physics <strong>and</strong> Mathematics, Vol. 2, 1958, 315.17. Gupta, H. C., A class of zero-variance biasing schemes for <strong>Monte</strong> <strong>Carlo</strong> reaction rate estimators, Nuci.Sci. Eng.. 83, 187, 1983.18. Gupta, H. C, Importance biasing scheme for expectation estimator in deep-penetration problems, Ann.Nuci. Energy, 11, 283, 1984.19. Hendricks, J. S., A code-generated <strong>Monte</strong> <strong>Carlo</strong> importance fuction, Trans. Am. Nuci. Soc, 41, 307,1982.20. Hendricks, J. S. <strong>and</strong> Carter, 1.. L., Anisotropic angle biasing of photons, Nuci. Sci. Eng., 89, 118,1985.21. Juzaitis, R. J., Predicting the cost of splitting in <strong>Monte</strong> <strong>Carlo</strong> particle transport, Nuci. Sci. Eng., 80, 424,1982.22. Karcher, R. H., et al., The application of track-length distribution biasing in <strong>Monte</strong> <strong>Carlo</strong> deep-penetrationcalculations, Nuci. Sci. Eng., 31, 492, 1968.23. Kahn. H., R<strong>and</strong>om sampling (<strong>Monte</strong> <strong>Carlo</strong>) techniques in neutron attenuation problems, Nucleonics, 6,27, 36, 60, 1950.24. Kahn, H., Modification of the <strong>Monte</strong> <strong>Carlo</strong> Method, R<strong>and</strong> Report P-132. R<strong>and</strong> Corporation, Santa Monica,1949.25. Kalos, M. H., Importance sampling in <strong>Monte</strong> <strong>Carlo</strong> shielding calculations, Nuci. Sci. Eng., 16, 227, 1963.26. LASL Group X-6, MCNP — A General <strong>Monte</strong> <strong>Carlo</strong> Code for <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> <strong>Transport</strong>, LA-7396-M Report, Los Alamos Scientific Laboratory, 1979.27. Lanore, J. M., Theoretical Principles of a Weighting Method in the <strong>Monte</strong> <strong>Carlo</strong> Calculations, CEA NoteN-817, Nuclear Research Center, Fontenay-aux-Roses, 1967.28. Lanore, J. M., Weighting <strong>and</strong> biasing of a <strong>Monte</strong> <strong>Carlo</strong> calculation for very deep penetration of radiation,Nuci. Sci. Eng., 45, 66, 1971.29. Lewitt, L., A simplified <strong>Monte</strong> <strong>Carlo</strong> approach to deep penetration problems, Trans. Am. Nuci. Soc, 7,44, 1964.30. Lewitt, L. B., The use of self-optimized exponential biasing in obtaining <strong>Monte</strong> <strong>Carlo</strong> estimates of transmissionprobabilities, Nuci. Sci. Eng., 31, 500, 1968.31. Leimdorfcr, M., A <strong>Monte</strong> <strong>Carlo</strong> method for the analysis of gamma radiation transport from distributedsources in laminated shields, Nukleonik, 6, 58, 1964.32. Leimdorfcr. M., On the transformation of the transport equation for solving deep penetration problemsby <strong>Monte</strong> <strong>Carlo</strong> method, Trans. Chalmers Univ. Technol., 286, 1964.33. Leimdorfcr, M., On the use of <strong>Monte</strong> <strong>Carlo</strong> methods for calculating the deep penetration of neutrons inshields, Trans. Chalmers Univ. Technol., 287, 1964.34. Lux, I., Variance <strong>and</strong> Efficiency in <strong>Transport</strong> <strong>Monte</strong> <strong>Carlo</strong>, KFKI-1979-35 Report, Central ResearchInstitute for Physics, Budapest, 1979.35. Lux, I., Variance versus efficiency in transport <strong>Monte</strong> <strong>Carlo</strong>, Nuci. Sci. Eng., 73, 66. 1980.36. Lux, I., HEXANN-EVALU — A <strong>Monte</strong> <strong>Carlo</strong> Program System for Pressure Vessel <strong>Neutron</strong> IrradiationCalculation, Research Report 210, Technical Research Centre of Finl<strong>and</strong>, Helsinki, 1983.37. Lux, I., A h<strong>and</strong>y method for approximate optimization of splitting in <strong>Monte</strong> <strong>Carlo</strong>, Nuci. Sci. Eng., 83,198, 1983.38. Lux, 1., A continuous model for the optimization of splitting in deep-penetration <strong>Monte</strong> <strong>Carlo</strong>, in Proc.6th ICRS. Vol. 1, Tokyo, 1983, 219.39. Lux, I., On zero variance <strong>Monte</strong> <strong>Carlo</strong> path-stretching schemes, JVuc7. Sci. Eng., 84, 388, 1983.
40. Lux, I., On Geometrical Splitting in Nonanalog Games, KFKM985-04 Report, Central Research Institutefor Physics, Budapest, 1985.41. Murthy, K. P. N., Direction dependent exponential biasing in <strong>Monte</strong> <strong>Carlo</strong> simulation of radiation transportin thick shields, in Proc. 5th ICRS, Science Press, Princeton, 1977, 598.42. Murthy, K. P. N., Tracklength biasing in <strong>Monte</strong> <strong>Carlo</strong> radiation transport, Atomkermmerg. •Kerntech.34, 125, 1979.43. Murthy, K. P. N,, A comparative study of different tracklength biasing schemes, Ann. Nucl389, 1980.44. Punti. C, Angular <strong>and</strong> tracklength distribution biasing in <strong>Monte</strong> <strong>Carlo</strong> deep penetration cafProc. Conf. New Developments in Reactor Mathetmatics <strong>and</strong> Applications, ORNL-RS1C-29 >'
513INDEXAAbsorptiondefined, 25photonuclear, 47Adjoint <strong>Monte</strong> <strong>Carlo</strong> analysis, 126--138, 145—146Analog gamesdefined, 5plausible modifications, 55—56replacement of absorption <strong>and</strong> leakage bystatistical weight reduction, 56—58replacement of multiplication by increase ofweight, 58Russian roulette <strong>and</strong> splitting, 58—59simulation of r<strong>and</strong>om walkcollisions in general, 41—43direction cosines of particle after scattering, 54matter/neutron interactions, 47—54mattter/photon interactions, 43—47path length selection, 39—41scoring, 54—55selection of source parameters, 34—38Anisotropic scattering, 73—75Bilinear forms estimation, 287—289Capture events, 48Carlson method of energy selection, 68—69Cartesian coordinates, 23Central limit theorem, 63Charged particle producing reactions, analogsimulation, 53Coherent (Rayleigh) scattering, 47Collision densitiesdefined, 27—29, 99—100equations connecting, 101—103transition <strong>and</strong> collision kernel definition,100—103Collision density <strong>and</strong> importance equationsadjoint <strong>Monte</strong> <strong>Carlo</strong> analysis, 126—138,145—146collision density equations, 98—107elementary variance—reducing techniques,86—93Fredholm-type integral equations, 93—98integral calculation, 81—86scoring, 108—119special problemsBcriticality studies, 125—126Cpath stretching (exponential transformation),119—121perturbation <strong>Monte</strong> <strong>Carlo</strong>, 121—125variances, 138—141Collision kernelalternative forms in moment analysis, 182—183definition, 101 — 103normalization, 106—107of value equation in adjoint method, 131 —134Collisions, analog simulation, 41—43Compton scattering, 44—46Continuous splitting, 470—486Correlated <strong>Monte</strong> <strong>Carlo</strong> analysis: perturbationanalysis, 305—306difference estimators, 314—315examples <strong>and</strong> special techniques, 32!—324feasibility of, 311—314moment equations, 307—311parametric perturbations: integral <strong>Monte</strong> <strong>Carlo</strong>,327—328perturbation source method, 324—326variance of the correlated score difference,315—321Correlated sampling, 92—93, 122—123Correlation of estimators, 289—290Coupled multiparticle simulation, 290—294Criticality studies, 125—126, 346—347one-step by acceleration of iteration, 364—367parametric derivatives of k eff, 376—377practical realizations, 357—362reactivity change due to perturbations, 367—376source iterationconvergence of, 355—357methods, 347—355unbiased estimation of reaction rates, 430—431variance of estimated multiplication factor,362—364Delta scattering, 222—226Differential <strong>Monte</strong> <strong>Carlo</strong> analysis: sensitivityanalysis, 123—125, 328—329Ddata adjustment with sensitivities, 336—338discussion, 332—336estimation of first-order derivatives, 329—332estimation of higher-order derivatives, 338—340example, 340—343expansion to parameter-dependent estimators,343—344perturbation estimation: Taylor series approach,344—346Direction vector defined, 23Direct simulation of physical processesanalog simulation of the r<strong>and</strong>om walk, 34—55,see also Analogsimulationsangle selection for anisotropic scatterings, 73—78energy selection from Klein-Nishina formula,65—69
514 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationsfission neutron energy selection, 71—73plausible modifications of analog game, 55—62statistical considerations, 62—65thermal neutron energy selection, 69—71Elastic scattering, 48—50ELP method, 263—265Energy selectionfission neutrons, 71—73Klein-Nishina formula, 65—69thermal neutron, 69—71Expectation of matrix ARA, 434—435Expectation ratio estimation, 419—425Expected leakage probability method, 234—235Expected values in collision density equations,91—92Exponential distribution sampling, 16Exponential transformation, 119—121, 207—212First-moment equation analysis, 196—199Fission, analog simulation, 52—53Fission neutrons, energy selection, 71—73Fluence rate, see FluxFluxEFpoint estimation, 60—61, 114—119bounded-variance point estimators, 391 — 394confidence limits for singular estimators,382—386estimators with first-order singularity,386—391next-event point estimator, 378—382practical modifications of basic method,394—399reaction rate integral calculation, 111—112Flux density, see FluxFlux-type quantities defined, 24Forward-backward moment equations, 294—297Fredholm-type integral equations, 93—98Free flight, 184—186Free paths <strong>and</strong> distances, 27Gamma distribution in thermal neutron energyselection, 70Geometrical splitting, 186—192, 462—470GImportance value used as importance function, 141Importance sampling, 87—89, 96—98, 203—207Inelastic scattering, 50—51Initial directions sampling, 37—38initial energies sampling, 38Integral calculation, 81—86convergence of numerical methods, 85—86domains of complicated shape, 83—85IFredholm-type equations, 93—98generalization to multidimensional, 83one-dimensional. 81—83Inverse distribution method, 8KKernel definition in collision density equations,100—103Kernel distortion, importance sampling, 96—98Kernel normalization in collision density equations.104—107Klein-Nishina formula, 65—69Klein-Nishina theory of Comptom scattering,44—46Legendre expansion, 77—78Matter/particle interactions, definitions <strong>and</strong>notations, 25—27Matter/photon interactions, analog simulation,LM43—47Maxwellian distribution in thermal neutron energyselection, 69—70Mean estimation from rare sets, 411—417MELP method, 263—265Moment equationsapproximate solutions, 239—240effect of surroundings, 246—249quality of, 244—246separation assumption, 241—244simplified model, 240—241empirical third moments, 435—436extension to multiplying games, 169—170collision kernel alternative forms, 182—183equivalent nonmultiplying game, 173—178expectation <strong>and</strong> second moment, 171—173score probability equation, 170—171splitting: nonmultiplying process played asmultiplying, 178—182first-moment equation analysis, 196—197delta scattering, 222—226generalized exponential transformation,207—212importance analysis, 203—207nonanalog game feasibility, 216—221nonanalog game without statistical weights,203—207path stretching, 212—213time <strong>and</strong> number event per history, 213—215unbiased estimators, 197—199weight generation rules, 199—203forward-backward model solutions, 294—297further generalizations, 183—184geometrical splitting, 186—192inclusion of time dependence, 193—196interruption <strong>and</strong> restart of free flight, 184—18
515score probability in general time-independentgame, 192—193general considerationsanalog <strong>and</strong> nonanalog simulations, 149—151conditions of existence <strong>and</strong> uniqueness,146—149definitions <strong>and</strong> notations, 151 —155heuristic interpretation, 155—158relation of expected score to adjoint collisiondensity, 145—146miscellaneous specificbilinear forms estimation, 287—289correlation of estimators, 289—290coupled multiparticle simulation, 290—294in nonmultiplying gamesanalytical example, 166—169moment of a general score function, 160—163score probability equations, 158—160special cases: expectation <strong>and</strong> second momentof the score, 163—166partially unbiased estimators, 226—228analysis of variances in straight-ahead scatteringmodel, 236—239commonly used estimators, 231—236transformation theorems, 228—231second-moment equation analysis, 249—250boundedness of variance, 258—260examples: survival biasing <strong>and</strong> ELP <strong>and</strong> MELPmethod, 263—265of multiple convolutions, 297—300optimization of source distribution, 284—286relative merits of common estimators,275--280 estimator, 280—283sufficient conditions of variance reduction bynonanalog games, 260—263variance <strong>and</strong> efficiency of equivalent nonmultiplyinggame, 265—271variance versus efficiency in nonanalog game,283—284zero—variance partially unbiased estimators,271—275zero-variance schemes, 250—258slab transmission of particles, 508—509straight-ahead scattering model, 300—301variance estimates by, 139—141Moment-generating equation, 290<strong>Monte</strong> <strong>Carlo</strong> method defined, 5—6Multiparticle simulation, 290—294Multiple-convolution second-moment analysis,297—300Multiplicative effects defined, 25Multiplying gamesequivalent nonmultiplying, variance <strong>and</strong> efficiencyof, 265—271moment equations in, 169—170expectation <strong>and</strong> second moment, 171 —173score probability equation, 170—171nonmultiplying played as: splitting, 178—182Neumann series expansion of Fredhoim—typeequations, 94—95<strong>Neutron</strong>/matter interactions, analog simulation,47—54, 57—64(n.2n) reactions, 53(n.3n) reactions, 53Nonanalog gamesdefined, 5feasability in moment equations, 216—222importance sampling, 203—207moment equations, 149— 151in second-moment equation analysis, 260—263variance versus efficiency in, 283—284Nonmultiplying gamesequivalent to multiplying, 173 — 178, 265—27!moment equations inanalytical example, 166—169Nexpectation <strong>and</strong> second moment of the score,163—166moment of a general score function, 160—163score probability equations, 158—160played as multiplying: splitting, 178—182Normal distribution sampling, 14—16Optimization, 441—442continuous splitting model, 470—486by direct statistical approach, 458—462of geometrical splitting, 462—470of path stretching, 487—489practical applications, 497—505special problems, 506—508in straight-ahead model, 447—455zero-variance schemes, 489—497of Russian roulette parameter, 455—458of source distribution, 284—286splitting schemes in straight—ahead model,442—447weight-window technique, 486—487OPair-production, 46—47Partially unbiased estimatorsin first-moment equation analysis, 197—199in moment equations, 226—237self-improving, 280—283<strong>Particle</strong>/matter interactions, definitions <strong>and</strong>notations, 25—27<strong>Particle</strong> sources defined, 23P<strong>Particle</strong> transport, basic physical quantities, 22---3(;Path length selection in analog simulation of r<strong>and</strong>omwalk, 39—41Path stretching, 119—121, 212—213optimization, 487—489practical applications, 497—505special problems, 506—508
516 <strong>Monte</strong> <strong>Carlo</strong> <strong>Particle</strong> <strong>Transport</strong> <strong>Methods</strong>: <strong>Neutron</strong> <strong>and</strong> <strong>Photon</strong> Calculationsin straight-ahead model, 447—455zero-variance schemes, 489—497Pay-off functions in collision density equations,110--119Perturbation calculations, 121 — 125, 307—328, seealso Correlated <strong>Monte</strong> <strong>Carlo</strong> analysisby differential games, 344—348Taylor series approach, 344—348Phase space defined, 23Photoelectric effect, analog simulation, 43—44<strong>Photon</strong>/matter interactions, analog simulation, 43—47<strong>Photon</strong>uclear absorption, 47Point estimation of flux, 60—61, 378—399, seealso Flux, point estimation ofPower density function, first derivative sampling,16—19Power function selection of sampling probabilitydistributions, 13—14Probability mixing method, 9Quantities <strong>and</strong> notations, 22—30Quota sampling, 90—91Radiative capture, 48Radioactive activity defined, 23R<strong>and</strong>om vector selection, 19—20R<strong>and</strong>om walk, analog simulation, see Analoggames, simulation of r<strong>and</strong>om walkRare events, 62Rare setsestimation of combined variance, 417—419estimation of common mean, 411—417Rayleigh (coherent) scattering, 47Rejection techniques, 9—12in analog simulation of r<strong>and</strong>om walk, 36—37in Klein-Nishina energy selection, 66—68in Legendre expansion, 77—78Russian roulette method, 58—59, 107optimization of, 455—458Sample mean estimation, 399—406Samplingof adjoint source, 130—131correlated, 122—123correlation, 92—93importance, 87—89, 203—207, 96—98initial directions, 37—38initial energies, 38mean <strong>and</strong> variance in straightforward, 86—87quota, 90—91small sets, 406—411, 431—434space coordinates, 35—37systematic, 89—90Sampling probability distributions, 6—8QRSefficient selections from the exponential distribution,16first derivative of the probability density function,16—19inverse distribution method, 8probability mixing method, 9r<strong>and</strong>om vector selection, 19—20rejection techniques, 9—12sampling from normal distribution, 14—16selection from power functions, 13—14table look-up method, 12—13two- <strong>and</strong> three—dimensional r<strong>and</strong>om orientations,20—22Scatteringanalog simulation, 43angle selection for anisotropic, 73—75Compton, 44—46defined, 25delta, 222—226direction cosines of particle after, 54elastic, 48—50inelastic, 50—51Rayleigh (coherent), 47straight-ahead model, 236—239, 300—301of thermal neutrons, 51—52Scoringof adjoint <strong>Monte</strong> <strong>Carlo</strong> analysis, 134—137in analog simulation of r<strong>and</strong>om walk, 54—55in collision density equations, 108—119expected values in analog modifications, 59—62Second-moment equation analysis, 249—250of multiple convolutions, 297—300zero-variance schemes, 250—258, 271—275Self-improving estimator, 280—283Sensitivity analysis, 123—125, 328—346, see alsoDifferential <strong>Monte</strong> <strong>Carlo</strong> analysis: sensitivityanalysisSlab transmission, 59—60, 113—114, 508—509Source density defined, 23Source iteration, 347—357Source parameter selection in analog games,34—35Space coordinate sampling, 35—37Splitting, 58—59continuous, 470—486, 186—192optimization of, 462—470in moment equations, 178—182optimization in straight-ahead model, 442—447Statistical considerations in analog games, 62—65Statistical evaluation problemsdetermination of theoretical variances, 426—429estimation of common mean from rare sets,411—417estimation of ratio of expectations, 419—425optimum combination of sample mean, 399—406unbiased estimation of combined variants fromsmall sample sets, 406—411unbiased estimation of criticality reaction rates,430—431Straight-ahead model, 236—239, 300—301optimization
517path stretching, 447—455splitting, 442—447Survival biasing, 263—265Systematic sampling, 89—90Table look-up method, 12—13, 75Termination in collision density equations, 107Thermal neutronsenergy selection, 69—71scattering, 51—52Third moments, empirical, 435—436Three-dimensional sampling, 20—22, 37Time-dependent games, 193—196Time-independent games, 192—193Transformation theorems in moment equations,228—231Transition kerneldefinition, 100—101normalization, 105—106Trexpectation estimator, 235Two-dimensional r<strong>and</strong>om orientation sampling,20—22TUUnbiased estimators in first-moment equationanalysis, 197—199Uncollided particles, 137—138Unresolved resonance range cross-sections, 53—54VVariance reductionelementary in collision density/importanceequationscorrelated sampling, 92—93importance sampling, 87—89mean <strong>and</strong> variance in straightforward sampling,86—87quota sampling, 90—91systematic sampling, 89—90use of expected values, 91—92Variances in collision density equations, 138—141Weight generation rules for first-moment analysis,199—203Weight-window technique of optimatization,486—487Yield defined, 23WYZZero-variance schemesof path stretching, 489—497in second-moment equation analysis, 250-—.258,271—275