

Three Problems in Robotics - helix
Three Problems in Robotics - helix
Three Problems in Robotics - helix
- No tags were found...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
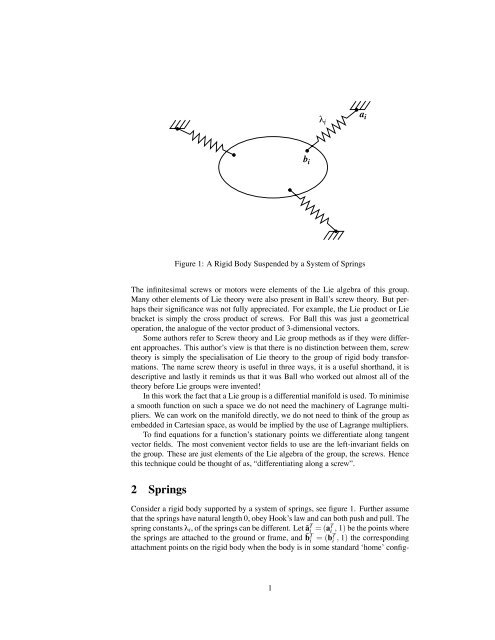
λ iaibiFigure 1: A Rigid Body Suspended by a System of Spr<strong>in</strong>gsThe <strong>in</strong>f<strong>in</strong>itesimal screws or motors were elements of the Lie algebra of this group.Many other elements of Lie theory were also present <strong>in</strong> Ball’s screw theory. But perhapstheir significance was not fully appreciated. For example, the Lie product or Liebracket is simply the cross product of screws. For Ball this was just a geometricaloperation, the analogue of the vector product of 3-dimensional vectors.Some authors refer to Screw theory and Lie group methods as if they were differentapproaches. This author’s view is that there is no dist<strong>in</strong>ction between them, screwtheory is simply the specialisation of Lie theory to the group of rigid body transformations.The name screw theory is useful <strong>in</strong> three ways, it is a useful shorthand, it isdescriptive and lastly it rem<strong>in</strong>ds us that it was Ball who worked out almost all of thetheory before Lie groups were <strong>in</strong>vented!In this work the fact that a Lie group is a differential manifold is used. To m<strong>in</strong>imisea smooth function on such a space we do not need the mach<strong>in</strong>ery of Lagrange multipliers.We can work on the manifold directly, we do not need to th<strong>in</strong>k of the group asembedded <strong>in</strong> Cartesian space, as would be implied by the use of Lagrange multipliers.To f<strong>in</strong>d equations for a function’s stationary po<strong>in</strong>ts we differentiate along tangentvector fields. The most convenient vector fields to use are the left-<strong>in</strong>variant fields onthe group. These are just elements of the Lie algebra of the group, the screws. Hencethis technique could be thought of as, “differentiat<strong>in</strong>g along a screw”.2 Spr<strong>in</strong>gsConsider a rigid body supported by a system of spr<strong>in</strong>gs, see figure 1. Further assumethat the spr<strong>in</strong>gs have natural length 0, obey Hook’s law and can both push and pull. Thespr<strong>in</strong>g constants λ i , of the spr<strong>in</strong>gs can be different. Let ã T i =(a T i , 1) be the po<strong>in</strong>ts wherethe spr<strong>in</strong>gs are attached to the ground or frame, and ˜b T i =(b T i , 1) the correspond<strong>in</strong>gattachment po<strong>in</strong>ts on the rigid body when the body is <strong>in</strong> some standard ‘home’ config-1










