

Euler's Dynamic Equations - Theory - helix
Euler's Dynamic Equations - Theory - helix
Euler's Dynamic Equations - Theory - helix

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
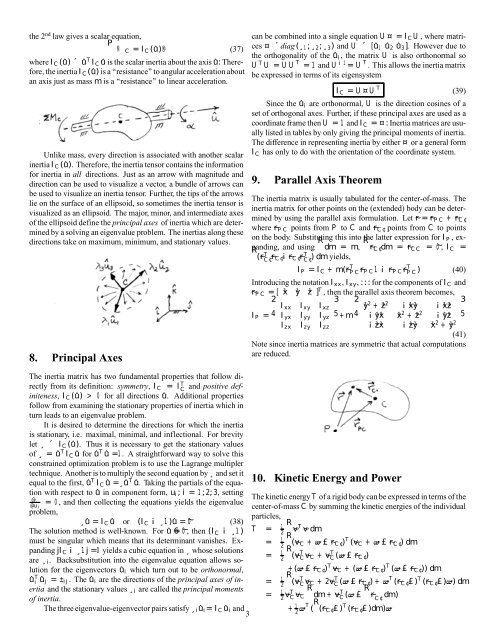
the 2 nd law gives a scalar equation,P M C =I C (^u)® (37)whereI C (^u)´^u T I C^uis the scalar inertia about the axis^u:Therefore,the inertiaI C (^u)is a ‘resistance ’to angular accelerationaboutan axis just as massm is a ‘resistance ’ to linear acceleration.Unlike mass, every direction is associated with another scalarinertiaI C (^u). Therefore, the inertia tensor contains the informationfor inertia in all directions. Just as an arrow with magnitude anddirection can be used to visualize a vector, a bundle of arrows canbe used to visualize an inertia tensor. Further, the tips of the arrowslie on the surface of an ellipsoid, so sometimes the inertia tensor isvisualized as an ellipsoid. The major, minor, and intermediate axesof the ellipsoid define the principal axes of inertia which are determinedby a solving an eigenvalue problem. The inertias along thesedirections take on maximum, minimum, and stationary values.8. Principal Axescan be combined into a single equationU¤=I C U, where matrices¤´diag(¸1;¸2;¸3)andU´[^u 1 ^u 2 ^u 3 ]. However due tothe orthogonality of the ^u i , the matrixU is also orthonormal soU T U=UU T =1 andU ¡1 =U T . This allows the inertia matrixbe expressed in terms of its eigensystemI C =U¤U T (39)Since the ^u i are orthonormal,U is the direction cosines of aset of orthogonal axes. Further, if these principal axes are used as acoordinate frame thenU=1 andI C =¤:Inertia matrices are usuallylisted in tables by only giving the principal moments of inertia.The difference in representing inertia by either¤or a general formI C has only to do with the orientation of the coordinate system.9. Parallel Axis TheoremThe inertia matrix is usually tabulated for the center-of-mass. Theinertia matrix for other points on the (extended) body can be determinedby using the parallel axis formulation. Let~r=~r PC +~r C¢where ~r PC points from P to C and~r C¢ points from C to pointson the body. Substituting this into the latter expression forI P , expanding,and using R dm = m, R R~r C¢ dm = ~r CC = ~0, I C =(~rTC¢~r C¢ ¡~r C¢ ~r T C¢)dm yields,I P =I C +m(~r T PC ~r PC1¡~r PC ~r T PC) (40)Introducing the notationI xx ,I xy ,:::for the components ofI C and~r PC =[ ¹x ¹y ¹z ] T , then the parallel axis theorem becomes,2I P = 4 I 3 23xx I xy I xzI yx I yy I yz5+m4 ¹y2 +¹z 2 ¡¹x¹y ¡¹x¹z¡¹y¹x ¹x 2 +¹z 2 ¡¹y¹z 5I zx I zy I zz ¡¹z¹x ¡¹z¹y ¹x 2 +¹y 2 (41)Note since inertia matrices are symmetric that actual computationsare reduced.The inertia matrix has two fundamental properties that follow directlyfrom its definition: symmetry, I C = I T Cand positive definiteness,I C (^u) > 0 for all directions ^u. Additional propertiesfollow from examining the stationary properties of inertia which inturn leads to an eigenvalue problem.It is desired to determine the directions for which the inertiais stationary, i.e. maximal, minimal, and inflectional. For brevitylet ¸ ´ I C (^u). Thus it is necessary to get the stationary valuesof ¸ = ^u T I C^u for^u T^u=1. A straightforward way to solve thisconstrained optimization problem is to use the Lagrange multiplertechnique. Another is to multiply the second equation by¸and set itequal to the first,^u T I C^u=¸^u T^u. Taking the partials of the equationwith respect to^u in component form, u i ;i = 1;2;3, setting@¸@u i= 0, and then collecting the equations yields the eigenvalueproblem,¸^u=I C^u or (I C ¡¸1)^u=~0 (38)The solution method is well-known. For^u6=~0, then(I C ¡¸1)must be singular which means that its determinant vanishes. ExpandingjIC ¡¸1j=0 yields a cubic equation in¸ whose solutionsare ¸i. Backsubstitution into the eigenvalue equation allows solutionfor the eigenvectors ^u i which turn out to be orthonormal,^u T i^u j = ± ij . The^u i are the directions of the principal axes of inertiaand the stationary values¸i are called the principal momentsof inertia.The three eigenvalue-eigenvector pairs satisfy¸i^u i =I C^u i and310. Kinetic Energy and PowerThe kinetic energyT of a rigid body canbe expressed in terms of thecenter-of-massC by summing the kinetic energies of the individualparticles,T = 1 2R ~v T ~vdm= 1 2R (~vC +~!£~r C¢ ) T (~v C + ~!£~r C¢ )dm= 1 2R (~vTC ~v C +~v T C(~!£~r C¢ )+(~!£~r C¢ ) T ~v C +(~!£~r C¢ ) T (~!£~r C¢ ))dmR= 1 2 (~vTC ~v C +2~v C(~!£~r T C¢ )+ ~! T (~r C¢ £) T (~r C¢ £)~!)dm= 1 2 ~vT C ~v RC dm+~vTC (~!£ R ~r C¢dm)+ 1 2 ~!T ( R (~r C¢ £) T (~r C¢ £)dm)~!










