NBP09-01 Cruise Report - British Oceanographic Data Centre
NBP09-01 Cruise Report - British Oceanographic Data Centre
NBP09-01 Cruise Report - British Oceanographic Data Centre
- No tags were found...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
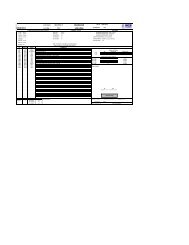
# Starttime, pos,duration, km42742842943043119/1/20091341 GMTS: 74:59.48W: 1<strong>01</strong>:48.236.8 hrs38 km.19/1/20092035 GMTS: 74:59.48W: 1<strong>01</strong>:48.2318.4 hrs1<strong>01</strong> km23/1/20091544 GMTS: 74 55.9W: 1<strong>01</strong> 50.71 + 3+ 17 hr113 km23/1/20091544S: 74:57.18W: 1<strong>01</strong>:40.7719 hr107 km24/1/20091345 GMTS: 74:52.21W: 1<strong>01</strong>:43.8634.5 hr183 kmPlanComments and FaultsTest Mission to 850 m depth. None critical. Motor appeared to stop andrestart intermittently - fixed for M428. T1on CTD appeared intermittent - connectorscleaned and cable replaced for M428. HotelGround Fault reading high - investigationshowed that source was related to the groundedCTD chassis but no fault found.Sub Ice shelf Mission. Startedwith short (2 hr) test mission, followedby data retrieval and checking.Then AUV run under the iceshelf. 30 km at 200 m const altitude,then turn and 100 m up altitude.2nd run under the PIG. 30 km in.200 m altitude in, and 100 m distanceoff the ice shelf coming out.3rd under ice shelf mission. 30 kmin. 200 m altitude in, and 100 mdistance off the ice shelf comingout.4th under ice shelf mission forPalmer 09<strong>01</strong>. First 60 km mission.Run 60km in at 100m altitude,turn when got to far waypointor collision avoided and thenrun back at 120m up altitude to30 km point, then profile for theremainder.Mission completed as planned. Good multibeam,CTD, O2, & Transmission data. PoorADCP up profiling range noted.First attempt at mission was unsuccessful becauseshortly after vehicle dived the downADCP misinterpreted a scattering layer at approximately500m as the seabed, causing thevehicle to go to a safe waypoint due to insufficientdepth. To overcome this, we reduced themaximum ADCP range to 440m. Second attemptwas unsuccessful as we were unable tocommunicate acoustically with the AUV due toa faulty crimp joint in the acoustic fish cable.Final mission was successful and completed asplanned.Battery changed before mission. Mission completedas planned.Mission terminated early due to the emergencyexception being called (failed collision avoidance).Consequently, the AUV carried out noprofiling on the way out. The vehicle had, howeverreached 55km under the ice shelf. Vehiclenose section damaged by collision with ice.Port CTD plumbing damaged. Linkquest transducerbulkhead connector damaged (the telemetrysystem was working properly on recovery).continued on next page<strong>NBP09</strong>-<strong>01</strong> <strong>Cruise</strong> <strong>Report</strong> (p. 27 of 83) Revised February 27, 2009