A MATLAB-Based Simulation for Autonomous Navigation of ... - IJME
A MATLAB-Based Simulation for Autonomous Navigation of ... - IJME
A MATLAB-Based Simulation for Autonomous Navigation of ... - IJME

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
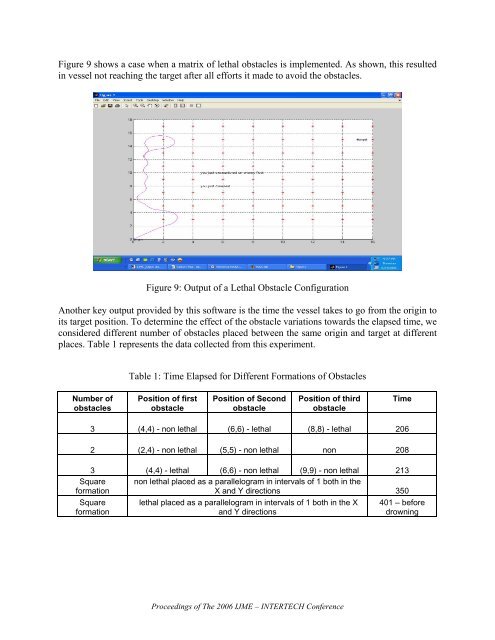
Figure 9 shows a case when a matrix <strong>of</strong> lethal obstacles is implemented. As shown, this resultedin vessel not reaching the target after all ef<strong>for</strong>ts it made to avoid the obstacles.Figure 9: Output <strong>of</strong> a Lethal Obstacle ConfigurationAnother key output provided by this s<strong>of</strong>tware is the time the vessel takes to go from the origin toits target position. To determine the effect <strong>of</strong> the obstacle variations towards the elapsed time, weconsidered different number <strong>of</strong> obstacles placed between the same origin and target at differentplaces. Table 1 represents the data collected from this experiment.Table 1: Time Elapsed <strong>for</strong> Different Formations <strong>of</strong> ObstaclesNumber <strong>of</strong>obstaclesPosition <strong>of</strong> firstobstaclePosition <strong>of</strong> SecondobstaclePosition <strong>of</strong> thirdobstacleTime3 (4,4) - non lethal (6,6) - lethal (8,8) - lethal 2062 (2,4) - non lethal (5,5) - non lethal non 2083 (4,4) - lethal (6,6) - non lethal (9,9) - non lethal 213non lethal placed as a parallelogram in intervals <strong>of</strong> 1 both in theX and Y directions 350Square<strong>for</strong>mationSquare<strong>for</strong>mationlethal placed as a parallelogram in intervals <strong>of</strong> 1 both in the Xand Y directions401 – be<strong>for</strong>edrowningProceedings <strong>of</strong> The 2006 <strong>IJME</strong> – INTERTECH Conference