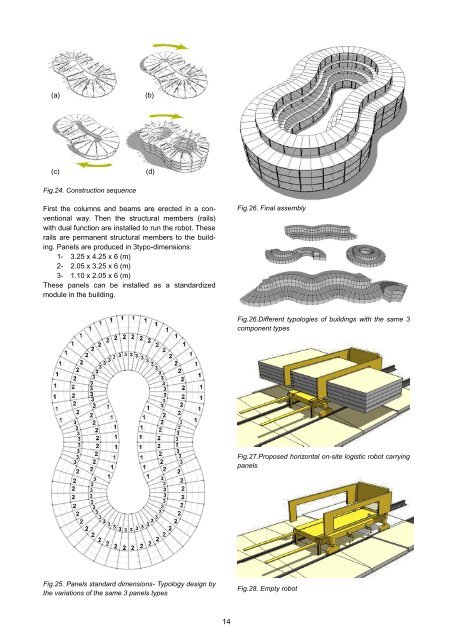
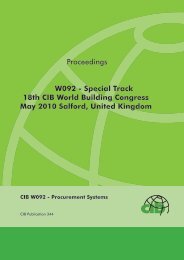
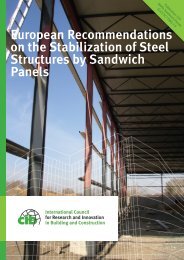
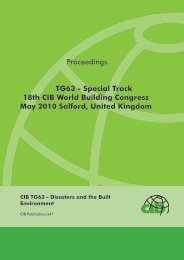
(a) (b) (c) (d) Fig.24. <strong>Construction</strong> sequence First the columns and beams are erected in a conventional way. Then the structural members (rails) with dual function are installed to run the robot. These rails are permanent structural members to the building. Panels are produced in 3typo-dimensions: 1- 3.25 x 4.25 x 6 (m) 2- 2.05 x 3.25 x 6 (m) 3- 1.10 x 2.05 x 6 (m) These panels can be installed as a standardized module in the building. Fig.25. Panels standard dimensions- Typology design by the variations of the same 3 panels types 14 Fig.26. Final assembly Fig.26.Different typologies of buildings with the same 3 component types Fig.27.Proposed horizontal on-site logistic robot carrying panels Fig.28. Empty robot
Fig.29. Robot arm fixing the panels The panels are designed with grooves at the required location to act as malfunction. So that those can easily be placed at right position, and make it easy for robot arm to screw it. The robots can be moved from one floor to another after the completion of each floor through a vertical mast attached with the structural members of the building. DISCUSSION AND CONCLUSIONS The proposed robot will provide the fast on-site logistics and higher mobility in elements transport and handling. Same like rail road construction; it will establish a new paradigm of horizontal construction with better usage in congested areas where tower cranes are not possible. There is a need to standardize the prefabricated building elements and robot oriented design to maximize the use of robot to make it economical. It still has room for improvement, but at this stage, its prototype can be developed to make it a part of an automated construction system. Japan is already having demographic change issues, and has started using automated construction sites from last two decades. A dramatic change in this regard is anticipated especially in developing countries. All this situation predict the more use of pervasive technologies and robotics in construction. References 1. S.M.S. Elatter: Automation and Robotics in construction: Opportunities and Challenges, Emirates Journal for Engineering Research, 2008, pp. 21-26. 2. Shigeo Kitahara, Yoshida Takashi: Deployment of <strong>Construction</strong> Robots applying the Information Technology and Network System, ISARC 2006, pp.19-23. 3. Cohen, J.E., “Human Population: The Next Half Century”, Science, Vol. 302(5648), 2003, pp. 1172- 1175. 4. Yukio Hasegawa: “A New Wave of <strong>Construction</strong> Automation and Robotics in japan”, Proceedings of the 17th ISARC, 2000, Keynote 2. 5. TunnelTalk Research, http://www.tunneltalk.com/First- use-in-tunnelling-ofa-vacuum-segment-erector.php, 2012. 15 6. ArchDaily, http://www.archdaily.com/74396 /horizontal-skyscraper-steven-holl-matthiaswolff/steven-holl-vanke-center-16/ 7. Fu, X., Gao, Y., Xiao, C., Tian, C., Chen, X., Yang, X., Wu, B., and Tang, H. “Horizontal Skyscraper: Innovative Structural Design of Shenzhen VANKE Center”, Journal of Structural Engineering, 2012, 138(6), pp. 663–668. 8. Xuesong Shen, Ming Lu, Siri Fernando, Simaan M. AbouRizk, “Tunnel boring machine positioning automation in tunnel construction”, Gerontechnology 2012; 11(2):384 9. Dexigner, Winners of the 2011 Skyscraper Competition, http://www.dexigner.com/news/22459, 2012 10. Malakahmad, A.; Ahmad Basri, N.E.; Zain, S.M.; "Production of renewable energy by transformation of kitchen waste to biogas, case study of Malaysia," Business, Engineering and Industrial Applications (ISBEIA), 2011 IEEE Symposium, 25-28 Sept. 2011, pp.219-223 11. Julian Ryall, “Japan harnesses energy from footsteps”, Fig.5, The Telegraph, UK, www.telegraph.co. uk/earth/energy/3721841/Japan-harnesses-energyfrom-footsteps.html# ,12 Dec 2008 12. Collins Latin Dictionary & Grammar 13. Fig.6, http://pocketgrow.com/blog/lifestyles-cultures/ hydroponics-feeding-zoo-animals/ 14. Wikipedia, “Totora (plant)”, http://en.wikipedia.org/ wiki/Totora_%28plant%29, 2012 15. Encyclopædia Britannica Online: Lake Titicaca. Retrieved 2007-JUL-12. 16. Fig.7, Totora reed boat, Photographer: Josh Hill, http://www.silentlandscapes.com/totora-reed-boat, 2012 17. NASA, “Ames Technology Capabilities and Facilities”, http://www.nasa.gov/centers/ames/re search/ technology-onepagers/in-itu_resource_Utiliza14. html , retrieved on 2012. 18. "UND Engineers would like to follow the Lunarcrete Road". Grand Forks Herald (North Dakota) Newspaper. 1988-02-28 19. Una Byrne, “Work-life balance”, Business Informa tion Review 2005, SAGE Publications, Vol. 22(1): 53–59 20. Wikipedia, “BedZED” http://en.wikipedia.org/wiki/BedZED , 2012 21. Fig.8. by Tom Chance in public domain at Wikipedia Commons, 2007. 22. Kate Andrews, ”BEDZED: Beddington Zero Ener gy Development in London”, Inhabitate (Architecture),2008,http://inhabitat.com/bedzed-beddingtonzero-energy-development-london/ 23. Muhamad Azani Yahya & Mohamad Ibrahim Mohamad, “Review on lean principles for rapid construction” Jurnal Teknologi, 54 (Sains & Kejuruteraan) Jan. 2011: 1–11 24. “A Chinese Miracle. 30-storey hotel in 15 days”, The Fab Web, 2012, http://thefabweb.com/16814/achinese-miracle-30-storey-hotel-in-15-days /#. UEyiFY3ia6M
- Page 1 and 2: Advanced Construction and Building
- Page 3 and 4: Foreword CIB Working Commission, W1
- Page 5 and 6: CIBW119CIC 2012 Keyword Index Keywo
- Page 7 and 8: CIBW119CIC 2012 Table of Contents T
- Page 9 and 10: Mass customization limitation and g
- Page 11 and 12: 3D production : In this kind of bui
- Page 13 and 14: References 1,2. Tim Crayton, "The D
- Page 15 and 16: RESEARCH GOAL Construction of build
- Page 17 and 18: Fig.7. Totora Reed Boat 16 Cherrapu
- Page 19 and 20: concept of a huge plane would have
- Page 21: Fig.22. Cross-sectional view Area D
- Page 25 and 26: Feasibility of new technologies in
- Page 27 and 28: Fig. 3 Jakarta’s traffic and publ
- Page 29 and 30: Without proper response in policies
- Page 31 and 32: A “DIY” Home Personal Productio
- Page 33 and 34: Fig.6. The units’ foldable legs A
- Page 35 and 36: Mass Customization in Home Industry
- Page 37 and 38: to brand of metal plates and webs u
- Page 39 and 40: Registeration New client form Clien
- Page 41 and 42: Integrated Work Space Systems for E
- Page 43 and 44: terms of physiological alterations,
- Page 45 and 46: CONCLUSIONS Analyzing all the data
- Page 47 and 48: has been given to R&D and the lates
- Page 49 and 50: and positioning, and the climbing m
- Page 51 and 52: � Make the system as non-intrusiv
- Page 53 and 54: lifted one story up, the constructi
- Page 55 and 56: their home country, which is perfec
- Page 57 and 58: PROJECT FREQUENCY REQUIREMENT If on
- Page 59 and 60: Demographic Change Design: Integrat
- Page 61 and 62: need health plans like Medicare and
- Page 63 and 64: and other elements are stacked at c
- Page 65 and 66: Prefabrication and Automation in Ra
- Page 67 and 68: when it starts to decay. Soil needs
- Page 69 and 70: production flow, the company adopte
- Page 71 and 72: RESEARCH AND SURVEY In developing c
- Page 73 and 74:
IMPLEMENTATION TO THE MOCK-UP (PROT
- Page 75 and 76:
Explorative Investigation Approach
- Page 77 and 78:
unit, it is possible to define a co
- Page 79 and 80:
The proposed approach dealt with id
- Page 81 and 82:
Fig.2. Measurement of reachability
- Page 83 and 84:
Based on the experimental results,
- Page 85 and 86:
to work individually or linked to e
- Page 87 and 88:
SOME BIG PROJECTS ANALYSIS AND THEI
- Page 89 and 90:
Dynamic construction visualizer Dyn
- Page 91 and 92:
Fig.5. Workflow with augmentation d
- Page 93 and 94:
sembled horizontally one by one on
- Page 95 and 96:
olled to the next point, where the
- Page 97 and 98:
olts was done manually in the origi
- Page 99 and 100:
Pallet Circle “The skill is built
- Page 101 and 102:
By the Standardization of construct
- Page 103 and 104:
Assistant Bed - Solution to Patient
- Page 105 and 106:
designed wheeled base is necessary.
- Page 107 and 108:
together, and it is a very importan
- Page 109 and 110:
CIB Mission Commissions we Members
- Page 111:
CIB General Secretariat Kruisplein