

Mono Magazine

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
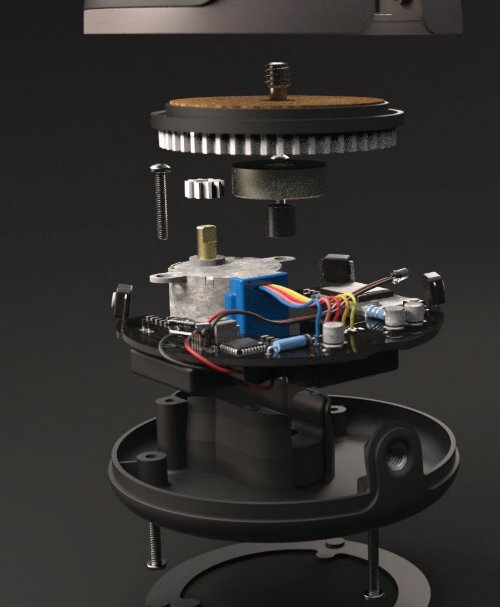
Engineering<br />
A challenge that arose was power consumption and<br />
considerations. The larger form factor of stepper motors provided<br />
them with high torque capability however, has a sub-sequential<br />
high power consumption. To successfully make the <strong>Mono</strong> device<br />
portable, a Lithium-Ion battery was to be integrated within<br />
the small form factor. In considering this, stepper motors were<br />
researched to find a model that had a low profile, high torque and<br />
low power consumption. A five volt stepper motor was found that<br />
used gears effectively to increase the torque whilst remaining<br />
compact and energy efficient. The discovery of this motor and its<br />
power requirements influenced the form factor of the <strong>Mono</strong> device<br />
as the housing had to accommodate this as well as a Lithium-Ion<br />
battery.<br />
To integrate the motor into the housing and effectively use it<br />
to its full potential, a gear ratio scheme was implemented. By<br />
introducing gears into the housing of the <strong>Mono</strong> device, the<br />
torque of the motor could be increased further whilst also<br />
reducing the power draw from the motor. For this to be effective,<br />
experimentation into gear-sets and configurations was undertaken<br />
to find the most suitable option. For this process, engineering<br />
gear generation tools were used to explore gear ratios and tooth<br />
interactions to maximise the efficiency of the system.<br />
Once developed, these were laser cut using acrylic and tested<br />
using a simple jig. A planetary gear-set was explored as the<br />
configuration to provide rotation translation effectively through<br />
the use of multiple gears and ratios. The challenge with using a<br />
planetary gear-set was the driving motor that must be positioned<br />
in the governing axis. In the formation of the <strong>Mono</strong> device, this<br />
was a problem due to the axis being occupied by the mounting<br />
threads and the camera mounting shaft. An alternative solution<br />
saw the employment of a simple 5:1 gear ratio which decentralised<br />
the motor to cater to <strong>Mono</strong>s axis considerations whilst retaining<br />
the advantages of a planetary gear-set.


