Robotics 1 Wheeled Mobile Robots Analysis, Planning, and Control
Robotics 1 Wheeled Mobile Robots Analysis, Planning, and Control
Robotics 1 Wheeled Mobile Robots Analysis, Planning, and Control

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
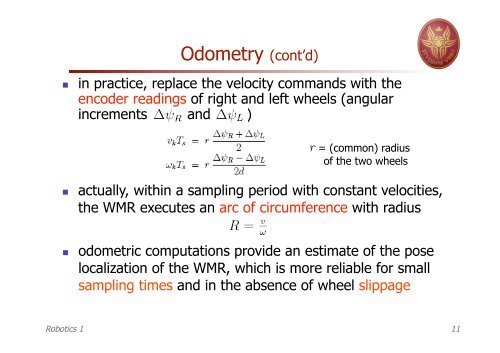
Odometry (cont’d)<br />
� in practice, replace the velocity comm<strong>and</strong>s with the<br />
encoder readings of right <strong>and</strong> left wheels (angular<br />
increments <strong>and</strong> )<br />
= (common) radius<br />
of the two wheels<br />
� actually, within a sampling period with constant velocities,<br />
the WMR executes an arc of circumference with radius<br />
� odometric computations provide an estimate of the pose<br />
localization of the WMR, which is more reliable for small<br />
sampling times <strong>and</strong> in the absence of wheel slippage<br />
<strong>Robotics</strong> 1 11