Robotics 1 Wheeled Mobile Robots Analysis, Planning, and Control
Robotics 1 Wheeled Mobile Robots Analysis, Planning, and Control
Robotics 1 Wheeled Mobile Robots Analysis, Planning, and Control
SHOW LESS

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
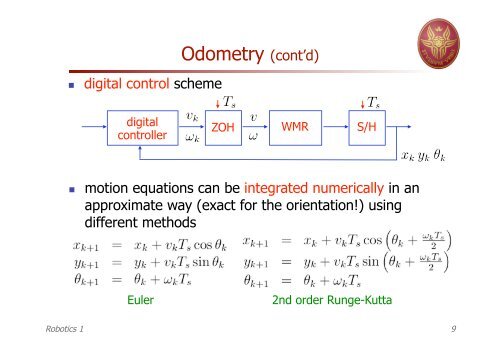
� digital control scheme<br />
digital<br />
controller<br />
Odometry (cont’d)<br />
ZOH WMR S/H<br />
� motion equations can be integrated numerically in an<br />
approximate way (exact for the orientation!) using<br />
different methods<br />
Euler 2nd order Runge-Kutta<br />
<strong>Robotics</strong> 1 9