

Evaluation Environment for AUTOSAR-Autocode in Motor Control ...
Evaluation Environment for AUTOSAR-Autocode in Motor Control ...
Evaluation Environment for AUTOSAR-Autocode in Motor Control ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
2.8 Example<br />
the RTE and should clarify how components can be implemented and how the API<br />
can be used.<br />
2.8.1 Configuration of the Example<br />
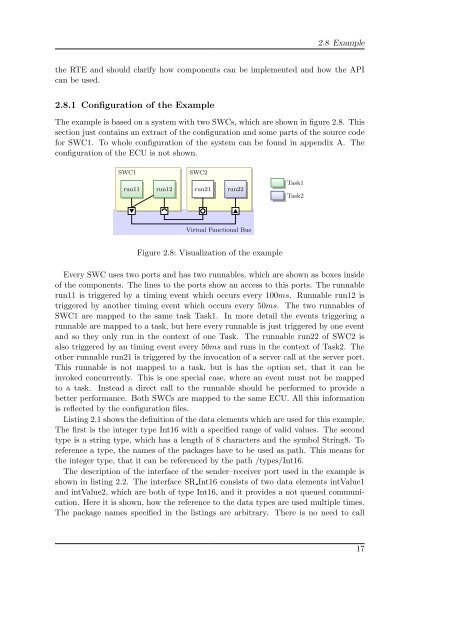
The example is based on a system with two SWCs, which are shown <strong>in</strong> figure 2.8. This<br />
section just conta<strong>in</strong>s an extract of the configuration and some parts of the source code<br />
<strong>for</strong> SWC1. To whole configuration of the system can be found <strong>in</strong> appendix A. The<br />
configuration of the ECU is not shown.<br />
SWC1<br />
run11 run12<br />
SWC2<br />
run21 run22<br />
Virtual Functional Bus<br />
Figure 2.8: Visualization of the example<br />
Task1<br />
Task2<br />
Every SWC uses two ports and has two runnables, which are shown as boxes <strong>in</strong>side<br />
of the components. The l<strong>in</strong>es to the ports show an access to this ports. The runnable<br />
run11 is triggered by a tim<strong>in</strong>g event which occurs every 100ms. Runnable run12 is<br />
triggered by another tim<strong>in</strong>g event which occurs every 50ms. The two runnables of<br />
SWC1 are mapped to the same task Task1. In more detail the events trigger<strong>in</strong>g a<br />
runnable are mapped to a task, but here every runnable is just triggered by one event<br />
and so they only run <strong>in</strong> the context of one Task. The runnable run22 of SWC2 is<br />
also triggered by an tim<strong>in</strong>g event every 50ms and runs <strong>in</strong> the context of Task2. The<br />
other runnable run21 is triggered by the <strong>in</strong>vocation of a server call at the server port.<br />
This runnable is not mapped to a task, but is has the option set, that it can be<br />
<strong>in</strong>voked concurrently. This is one special case, where an event must not be mapped<br />
to a task. Instead a direct call to the runnable should be per<strong>for</strong>med to provide a<br />
better per<strong>for</strong>mance. Both SWCs are mapped to the same ECU. All this <strong>in</strong><strong>for</strong>mation<br />
is reflected by the configuration files.<br />
List<strong>in</strong>g 2.1 shows the def<strong>in</strong>ition of the data elements which are used <strong>for</strong> this example.<br />
The first is the <strong>in</strong>teger type Int16 with a specified range of valid values. The second<br />
type is a str<strong>in</strong>g type, which has a length of 8 characters and the symbol Str<strong>in</strong>g8. To<br />
reference a type, the names of the packages have to be used as path. This means <strong>for</strong><br />
the <strong>in</strong>teger type, that it can be referenced by the path /types/Int16.<br />
The description of the <strong>in</strong>terface of the sender–receiver port used <strong>in</strong> the example is<br />
shown <strong>in</strong> list<strong>in</strong>g 2.2. The <strong>in</strong>terface SR Int16 consists of two data elements <strong>in</strong>tValue1<br />
and <strong>in</strong>tValue2, which are both of type Int16, and it provides a not queued communication.<br />
Here it is shown, how the reference to the data types are used multiple times.<br />
The package names specified <strong>in</strong> the list<strong>in</strong>gs are arbitrary. There is no need to call<br />
17













