

Instrucciones de Funcionamiento - Maxon Motor
Instrucciones de Funcionamiento - Maxon Motor
Instrucciones de Funcionamiento - Maxon Motor

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
<strong>Instrucciones</strong> <strong>de</strong> <strong>Funcionamiento</strong><br />
maxon motor<br />
DES 70/10 Servoamplificador 4-Q-EC<br />
6 Mensajes <strong>de</strong> Error<br />
6.1 Estado normal<br />
6.2 Error<br />
El LED ver<strong>de</strong> muestra el estado <strong>de</strong>l DES («Habilitado» o «Deshabilitado»).<br />
Si el DES está «Deshabilitado» (DES ready): el LED ver<strong>de</strong> parpa<strong>de</strong>a<br />
(frecuencia <strong>de</strong>l parpa<strong>de</strong>o aprox. 1 Hz), el LED rojo no brilla.<br />
Si el DES está «Habilitado» (etapa <strong>de</strong> potencia <strong>de</strong>l DES habilitada): el LED<br />
ver<strong>de</strong> brilla sin parpa<strong>de</strong>o, el LED rojo no brilla.<br />
Las condiciones <strong>de</strong> error son <strong>de</strong>tectadas por el DES.<br />
El LED rojo brilla continuamente cuando hay un error.<br />
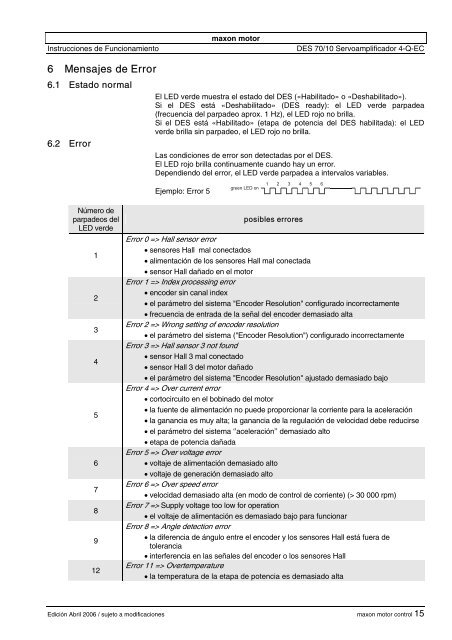
Dependiendo <strong>de</strong>l error, el LED ver<strong>de</strong> parpa<strong>de</strong>a a intervalos variables.<br />
Ejemplo: Error 5<br />
green LED on<br />
1 2 3 4 5 6<br />
Número <strong>de</strong><br />
parpa<strong>de</strong>os <strong>de</strong>l<br />
LED ver<strong>de</strong><br />
1<br />
2<br />
3<br />
4<br />
5<br />
6<br />
7<br />
8<br />
9<br />
12<br />
posibles errores<br />
Error 0 => Hall sensor error<br />
• sensores Hall mal conectados<br />
• alimentación <strong>de</strong> los sensores Hall mal conectada<br />
• sensor Hall dañado en el motor<br />
Error 1 => In<strong>de</strong>x processing error<br />
• enco<strong>de</strong>r sin canal in<strong>de</strong>x<br />
• el parámetro <strong>de</strong>l sistema "Enco<strong>de</strong>r Resolution" configurado incorrectamente<br />
• frecuencia <strong>de</strong> entrada <strong>de</strong> la señal <strong>de</strong>l enco<strong>de</strong>r <strong>de</strong>masiado alta<br />
Error 2 => Wrong setting of enco<strong>de</strong>r resolution<br />
• el parámetro <strong>de</strong>l sistema ("Enco<strong>de</strong>r Resolution") configurado incorrectamente<br />
Error 3 => Hall sensor 3 not found<br />
• sensor Hall 3 mal conectado<br />
• sensor Hall 3 <strong>de</strong>l motor dañado<br />
• el parámetro <strong>de</strong>l sistema "Enco<strong>de</strong>r Resolution" ajustado <strong>de</strong>masiado bajo<br />
Error 4 => Over current error<br />
• cortocircuito en el bobinado <strong>de</strong>l motor<br />
• la fuente <strong>de</strong> alimentación no pue<strong>de</strong> proporcionar la corriente para la aceleración<br />
• la ganancia es muy alta; la ganancia <strong>de</strong> la regulación <strong>de</strong> velocidad <strong>de</strong>be reducirse<br />
• el parámetro <strong>de</strong>l sistema ‘’aceleración’’ <strong>de</strong>masiado alto<br />
• etapa <strong>de</strong> potencia dañada<br />
Error 5 => Over voltage error<br />
• voltaje <strong>de</strong> alimentación <strong>de</strong>masiado alto<br />
• voltaje <strong>de</strong> generación <strong>de</strong>masiado alto<br />
Error 6 => Over speed error<br />
• velocidad <strong>de</strong>masiado alta (en modo <strong>de</strong> control <strong>de</strong> corriente) (> 30 000 rpm)<br />
Error 7 => Supply voltage too low for operation<br />
• el voltaje <strong>de</strong> alimentación es <strong>de</strong>masiado bajo para funcionar<br />
Error 8 => Angle <strong>de</strong>tection error<br />
• la diferencia <strong>de</strong> ángulo entre el enco<strong>de</strong>r y los sensores Hall está fuera <strong>de</strong><br />
tolerancia<br />
• interferencia en las señales <strong>de</strong>l enco<strong>de</strong>r o los sensores Hall<br />
Erro r 11 => Overtemperature<br />
• la temperatura <strong>de</strong> la etapa <strong>de</strong> potencia es <strong>de</strong>masiado alta<br />
Edición Abril 2006 / sujeto a modificaciones maxon motor control 15














