Corrections dynamiques et analyse de vitesse - liamg
Corrections dynamiques et analyse de vitesse - liamg
Corrections dynamiques et analyse de vitesse - liamg

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Introduction<br />
Correction NMO<br />
Un réflecteur plat<br />
Couches horizontales<br />
Distorsion<br />
Réflecteur incliné<br />
Analyse <strong>de</strong> <strong>vitesse</strong><br />
Introduction<br />
Correction DMO<br />
Principes<br />
Calcul <strong>de</strong> la<br />
correction DMO<br />
DMO dans le<br />
domaine f –k<br />
Influence <strong>de</strong> la <strong>vitesse</strong><br />
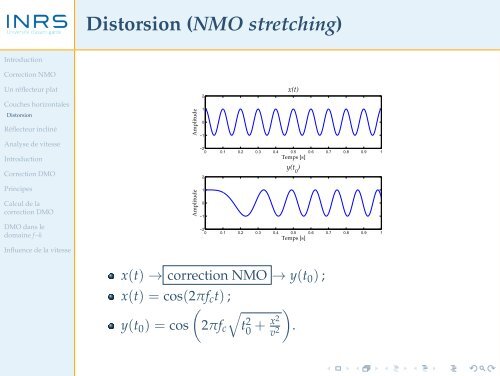
Distorsion (NMO str<strong>et</strong>ching)<br />
Amplitu<strong>de</strong><br />
Amplitu<strong>de</strong><br />
2<br />
1<br />
0<br />
−1<br />
x(t)<br />
−2<br />
0 0.1 0.2 0.3 0.4 0.5<br />
Temps [s]<br />
0.6 0.7 0.8 0.9 1<br />
2<br />
1<br />
0<br />
−1<br />
y(t 0 )<br />
−2<br />
0 0.1 0.2 0.3 0.4 0.5<br />
Temps [s]<br />
0.6 0.7 0.8 0.9 1<br />
x(t) → correction NMO → y(t0) ;<br />
x(t) = cos(2πfct) ;<br />
<br />
y(t0) = cos 2πfc t2 <br />
0 .<br />
+ x2<br />
v 2