

Esplorazione MultiRobot.pdf - Automatica
Esplorazione MultiRobot.pdf - Automatica
Esplorazione MultiRobot.pdf - Automatica

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
[m]<br />
0.6<br />
0.55<br />
0.5<br />
0.45<br />
0.4<br />
0.35<br />
0.3<br />
0.25<br />
Traiettoria di riferimento<br />
Posizione misurata<br />
1.75 1.8 1.85 1.9<br />
[m]<br />
1.95 2 2.05<br />
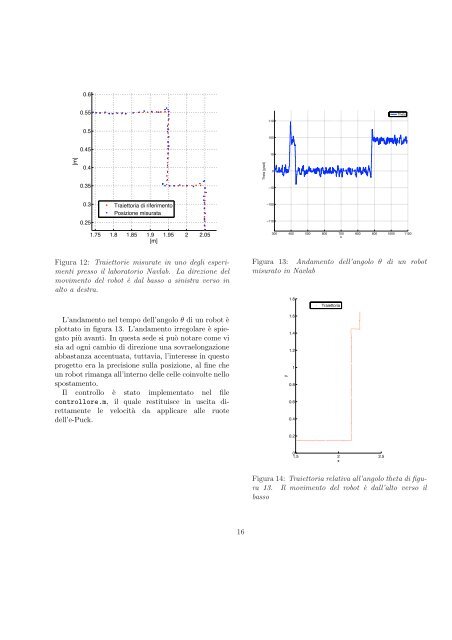
Figura 12: Traiettorie misurate in uno degli esperimenti<br />
presso il laboratorio Navlab. La direzione del<br />
movimento del robot è dal basso a sinistra verso in<br />
alto a destra.<br />
L’andamento nel tempo dell’angolo θ di un robot è<br />
plottato in figura 13. L’andamento irregolare è spiegato<br />
più avanti. In questa sede si può notare come vi<br />
sia ad ogni cambio di direzione una sovraelongazione<br />
abbastanza accentuata, tuttavia, l’interesse in questo<br />
progetto era la precisione sulla posizione, al fine che<br />
un robot rimanga all’interno delle celle coinvolte nello<br />
spostamento.<br />
Il controllo è stato implementato nel file<br />
controllore.m, il quale restituisce in uscita direttamente<br />
le velocità da applicare alle ruote<br />
dell’e-Puck.<br />
16<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
Figura 13: Andamento dell’angolo θ di un robot<br />
misurato in Navlab<br />
y<br />
1.8<br />
1.6<br />
1.4<br />
1.2<br />
1<br />
0.8<br />
0.6<br />
0.4<br />
0.2<br />
Traiettoria<br />
0<br />
1.5 2<br />
x<br />
2.5<br />
Figura 14: Traiettoria relativa all’angolo theta di figura<br />
13. Il movimento del robot è dall’alto verso il<br />
basso













