Micromotori a propulsione batterica
Micromotori a propulsione batterica
Micromotori a propulsione batterica
- No tags were found...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
scienzain primopianosituazione è ulteriormente complicatadalla “reversibilità” delle equazioniidrodinamiche a bassi numeri diReynolds per cui una deformazionereciproca non può produrre unospostamento netto. Per fare unesempio, la capasanta é un molluscodi qualche centimetro che riesce anuotare richiudendo rapidamente laconchiglia ed espellendo un getto diacqua nella direzione opposta al moto.A causa della reversibilità idrodinamicauna micro-capasanta ritornerebbeesattamente al punto di partenza unavolta riaperta la conchiglia. Questorisultato è noto in micro-idrodinamicacome “teorema della capasanta” [1] edesclude la possibilità di auto<strong>propulsione</strong>attraverso deformazioni reciproche,ovvero deformazioni cicliche percui è necessario ripercorrere tutte leconfigurazioni a ritroso per tornarenello stato di partenza. I batteriautopropellenti hanno escogitatouno stratagemma molto semplice edingegnoso per eludere i vincoli del“teorema della capasanta”. Il truccoconsiste nel ruotare un filamentoelicoidale, il flagello, producendo unadeformazione ciclica continua e nonreciproca. Dopo un giro completo,infatti, l’elica si ritrova al punto dipartenza e il batterio avrà percorso unospostamento netto. Il motore flagellareche aziona l’elica è un vero gioiellodi nanotecnologia, misura non piùdi 50 nm di diametro ed è compostodi circa 20 parti diverse. Può ruotarein senso antiorario e orario ad unafrequenza dell’ordine di 100 Hz con unaefficienza stimata dell’ordine del 90%.Il motore flagellare è uno dei motoribiologici più potenti e la possibilitàdi costruire dispositivi artificiali conun paragonabile grado di perfezioneè ancora molto remota. D’altra parteestrarre da una cellula un motoreflagellare funzionante è un’impresatroppo sofisticata vista la complessitàstrutturale del motore. Una possibilealternativa è allora quella di utilizzarel’intera cellula, con il suo motoreflagellare già assemblato, e con lapossibilità aggiuntiva di sfruttare lecapacità sensoriali del batterio. In uncerto senso si può dire che ci troviamoin una situazione simile a quella cheha caratterizzato il periodo storicopre-industriale. In mancanza di unatecnologia che ci permetta di costruireartificialmente macchine micrometrichedella perfezione di quelle viventi,possiamo sfruttare i microrganismicome veri e propri micro-animali dasoma del XXI secolo. Di recente è statadimostrata la possibilità di movimentaredelle microstrutture mediantel’adesione di uno strato di batteri motili(“tappeto batterico”) sulla superficie divari oggetti sintetici come microsferedi latex (polistirene) [2] o strutturedi PDMS (polidimetilsiloxano) [3].46 < il nuovo saggiatore
. Di leonardo et al.: micromotori a <strong>propulsione</strong> <strong>batterica</strong>Le proprietà fototattiche dei batteripossono essere utilizzate per controllaree guidare tali strutture con la luce [4, 5].È stato dimostrato, ad esempio, comeun’alga biflagellata (Chlamydomonasreinhardtii) possa trasportare un caricoancorato chimicamente alla paretecellulare. Le proprietà fototattiche dellacellula possono essere utilizzate perguidarne il percorso attraverso campiottici esterni, ma a questo punto èforse più conveniente utilizzare la lucestessa per trasportare direttamente ilcarico con tecniche di intrappolamentoottico. Uno dei maggiori probleminello sfruttamento del lavoro battericoconsiste, infatti, nel guidare le cellule inun moto direzionale predeterminato.In un ambiente omogeneo i batterinuotano in maniera caotica, esplorandol’ambiente circostante alla ricerca dicondizioni più favorevoli. Fin dalleprime osservazioni di Leeuwenhoek,una sospensione di batteriautopropellenti colpisce da subito perl’attività frenetica che si osserva (“Ilmovimento nell’acqua della maggiorparte di questi animaculi era così rapido,e così variamente diretto verso l’alto,verso il basso e orizzontalmente checonfesso di non aver potuto far altroche meravigliarmene.”), un’attività cheappare senza scopo e che, se potessimorettificare, potrebbe essere sfruttataper scopi per noi molto più utili. Chi èabituato a manipolare la materia nonvivente sa però che estrarre lavoro daun sistema caotico isolato è un’impresasenza speranza, come stabilito dalsecondo principio della termodinamica.Se così non fosse un battello potrebbenavigare semplicemente convertendol’agitazione termica delle molecoled’acqua in energia cinetica. D’altraparte i cammini casuali delle cellulein un bagno batterico assomigliano aprima vista ai moti di agitazione termicadelle molecole di un gas. Abbiamodunque speranza di estrarre lavorodall’agitazione disordinata della materiavivente? In altre parole, possiamorealizzare un micro-dispositivo che siaspinto dal movimento batterico in unmoto unidirezionale e riproducibilesenza ricorrere all’ausilio di campidi forza esterni? Queste domandesono inevitabilmente connesse con ilproblema più fondamentale di qualisiano le condizioni necessarie perl’emergere di un comportamentoordinato attraverso un meccanismodi auto-organizzazione. In questosenso le simmetrie giocano unruolo fondamentale. Come giàriconosciuto da Curie: “Les effets, cesont les phénomènes qui nécessitenttoujours, pour se produire, une certainedissymetrie. Si cette dissymetrie n’existepas, le phénomène est impossible.Ceci nous empêche souvent de nouségarer à la recherche de phénomènesirréalisables”[6]. In sostanza, effettiasimmetrici riproducibili necessitanosempre di corrispondenti causeasimmetriche. Se tali asimmetrie nonesistono il fenomeno è irrealizzabile.In particolare, il fenomeno cheintendiamo produrre consiste nellarotazione spontanea e unidirezionaledi un sistema nanofabbricato immersoin un bagno batterico. Questofenomeno viola tre simmetrie principali:a) simmetria per inversione dell’assetemporale, b) simmetria per riflessioneattraverso un piano contenente l’asse dirotazione z, c) simmetria per rotazioni di180° attorno a un asse perpendicolarea z. In altre parole, un moto rotatorioche osservato dall’alto avviene in sensoantiorario, avverrebbe in senso orariose osservato: a) a ritroso nel tempo,b) riflesso in uno specchio contenentel’asse di rotazione, c) dal basso. Se ilnostro dispositivo apparisse simmetricosotto almeno una delle trasformazionia), b) o c), non sarebbe in grado dirompere la corrispondente simmetriaspontaneamente in una manierapredicibile e riproducibile.La rottura della simmetria temporalerichiede necessariamente di averea che fare con un sistema fuoridall’equilibrio. Le sospensioni dibatteri autopropellenti sono proprioun esempio di fluido complesso fuoridall’equilibrio. Sebbene, a prima vista, ilmoto dei batteri assomigli alla dinamicacaotica delle molecole in un gas, letraiettorie dei batteri sono generate daleggi dinamiche irreversibili. L’azionecostante dei motori flagellari produceuna forza propulsiva che spinge il corpocellulare contro la resistenza viscosadel fluido in cui è immerso. Tali forzepropulsive agiscono come un campodi forze esterne non conservativo,producendo quindi una dinamicache non è simmetrica per inversionedell’asse temporale. In particolare,i batteri Escherichia coli sono spintida flagelli azionati da motori rotatoribidirezionali. Quando tutti i motoriruotano in senso antiorario (se osservatida dietro) la cellula viene spinta inun moto traslatorio quasi rettilineo.Tale moto è interrotto da eventi di“tumble” durante i quali uno o piùmotori invertono il senso di rotazioneprovocando uno svolgimento delfascio flagellare e una conseguenteorientazione casuale del corpo cellulare.Per quanto riguarda le simmetriespaziali, la natura chirale del flagellorompe evidentemente la simmetriaper riflessione b) ma non quella perribaltamento c). Quest’ultima simmetriadeve essere quindi esplicitamente rottaprogettando dei componenti di formaasimmetrica.In un primo lavoro di simulazionenumerica abbiamo creato unmodello di batteri autopropellenti ininterazione con ruote dentate di formaasimmetrica [7]. Il modello utilizzatoper rappresentare il singolo batterioè quello di corpo rigido allungato(aspect ratio 1/2) costituito da 2 centridi interazione equidistanziati lungo ilcorpo. Ogni batterio interagisce con glialtri tramite forze repulsive generateda potenziali sferici a corto raggiotra i centri di interazione dei batteri.Ogni batterio è altresì dotato di forzavol26 / no3-4 / anno2010 > 47
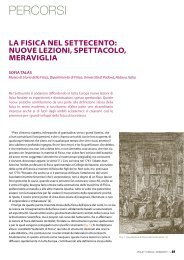
scienzain primopianoFig. 1 Meccanismo di incastro e spinta di un singolo batterio sulla ruota.A causa dell’asimmetria del bordo della ruota, i batteri che provengonocon un angolo nella regione verde, rimangono incastrati sullo spigolo econtribuiscono a far ruotare il dispositivo. Quelli che provengono dallaregione arancione scivolano via dalla ruota lungo il bordo.Fig. 2 In alto a sinistra un’immagine al microscopio ottico di una microruotadi 48 mm in soluzione acquosa. A fianco e di sotto le stesse ruoteancorate al substrato sacrificale viste al microscopio elettronico. In basso,da sinistra a destra, immagini al microscopio ottico ed elettronico diruote cave di 80 mm.autoprolusiva lungo la sua direzioneassiale ed è soggetto al fenomeno del“tumbling” che ne modifica, a frequenzafissata, la direzione di moto in manieracasuale. La dinamica è caratterizzatadall’assenza dei termini inerziali percui le equazioni del moto esprimonouna relazione lineare tra le velocitàdei corpi sospesi nel fluido (batteri emicro-oggetti) e le forze in gioco. Persimulare l’interazione tra i batteri el’oggetto esterno è stato messo a puntoun codice basato sulla repulsione conpotenziale continuo a corto raggio trail singolo batterio ed i lati dell’oggetto.Ci si è concentrati prevalentemente suoggetti esterni costituiti da rotellinecon denti di forma asimmetrica,ancorati al centro e liberi di ruotareintorno al proprio asse. Facendo partirela simulazione abbiamo osservatol’innesco di un moto spontaneo dellemicro-rotelle,sostenuto dalla spintadei batteri sul bordo sagomato deglioggetti. Gli oggetti ruotano infatticon una velocità angolare fluttuanteintorno ad un valor medio non nullodi una decina di gradi al secondo.Da un punto di vista microscopicol’effetto osservato di rotazioneunidirezionale si può comprendereanalizzando le collisioni dei battericon il bordo dell’oggetto. A causa dellaforma asimmetrica di quest’ultimo,i batteri, a seconda dell’angolo diincidenza, tenderanno ad allontanarsivelocemente da esso oppure a rimanereincastrati tra i denti ed esercitare quindiuna forza persistente sulla rotella(vedi fig. 1). Sono proprio tali forzenette unidirezionali che sospingonol’oggetto in moto rotatorio, il cui versoè legato alla particolare simmetria deibordi (simmetrie opposte generanomoti rotatori in direzioni opposte).Il fenomeno è risultato essereindipendente dai dettagli del problema(aspect ratio dei batteri, concentrazionedella soluzione, particolare forma deidenti asimmetrici, dimensioni dellaruota), con solo possibili differenze48 < il nuovo saggiatore
scienzain primopianoFig. 4 Confronto tra le configurazioni istantanee relative a tre tempisuccessivi di ruote asimmetriche ottenute in simulazione (in alto) eosservate nell’esperimento (in basso).Fig. 5 Effetto della concentrazione <strong>batterica</strong> sulla dinamica di rotazionedi due tipi di ruote asimmetriche (vedi fig. 2). Nelle soluzioni piùconcentrate si osservano velocità di rotazione maggiori accompagnateda fluttuazioni più ampie e persistenti, legate alle dinamiche collettivedei batteri ad alta densità.sull’interfaccia liquido-aria dovesono libere di ruotare. Quando laconcentrazione raggiunge un valoreabbastanza elevato (10 10 batteri/ml),l’azione cooperativa dei batteri produceun momento torcente sufficientea ruotare le micro-ruote con unafrequenza di circa 1 rpm. Essendosospese su un’interfaccia liquido-aria, ilcontributo dell’attrito viscososulla base della rotella è trascurabile,per cui possiamo stimare il momentotorcente applicato dai batteriassumendo un coefficiente d’attritorotazionale pari alla metà di quello diun disco lontano da interfacce.In tale approssimazione una frequenzarotazionale di 1 rpm corrisponde a unmomento torcente di circa 10 pN mm.La direzione di rotazione può essereoraria o antioraria rispettivamente perle due possibili orientazioni del bordoasimmetrico dell’oggetto. La fig. 3riporta l’angolo di rotazione in funzionedel tempo per ruote asimmetriche diopposta orientazione e per una ruotasimmetrica. Fluttuazioni nel numero enella disposizione locale dei batteri suicontorni delle ruote producono grossefluttuazioni nella velocità angolaresia delle ruote simmetriche che diquelle asimmetriche come mostratoin fig. 3. Una ruota asimmetrica in unbuffer privo di batteri presenta dellefluttuazioni browniane di entità moltominore. La dinamica di rotazioneosservata somiglia molto alle previsioninumeriche [7] come evidenziato dalconfronto in fig. 4. La velocità di nuotodi un singolo batterio fornisce un limitemassimo per la velocità lineare delbordo di una ruota. Nel nostro caso ilbordo delle micro-ruote gira con unavelocità lineare di soli 2.5 mm al secondocontro una velocità media di nuotodei batteri di 20 mm al secondo. Colpassare del tempo la concentrazionedi “cibo” diminuisce mentre quelladi sottoprodotti del metabolismocellulare aumenta. I batteri perdonoprogressivamente la loro motilità50 < il nuovo saggiatore
. Di leonardo et al.: micromotori a <strong>propulsione</strong> <strong>batterica</strong>e infine muoiono. Altri fenomeniquali l’aggregazione tra batteri e laformazione di biofilm fissano unlimite alla durata di funzionamentodei dispositivi a <strong>propulsione</strong> <strong>batterica</strong>.Anche se possiamo pensare a diversestrategie per ritardare questi processi,un tempo di vita finito è un prezzo dapagare inevitabilmente se vogliamocostruire un micromotore autonomo,che contenga in sé tutto ciò che ènecessario al suo funzionamento,senza bisogno di sorgenti energeticheesterne. Abbiamo costruito ruote didiversa geometria per studiare il ruolodella forma. Ad esempio ruote aventilo stesso diametro di 48 mm ma con unnumero maggiore di denti presentanoun comportamento molto simile.Sebbene le variazioni nella velocitàangolare possano essere grandi anchetra ruote con la stessa geometria enello stesso bagno, tuttavia le velocitàdi rotazione massime non sembranodipendere molto dalla geometriaa parità di dimensioni. La presenzadi grosse fluttuazioni nella velocitàangolare rende anche difficile valutarein maniera quantitativa il ruolo dellaconcentrazione. Tuttavia quando laconcentrazione raggiunge valori moltoelevati (circa 10 11 batteri/ml), i batteriiniziano a manifestare comportamenticollettivi su larga scala che si traduconoin una maggiore velocità di rotazionedelle microstrutture. In particolareabbiamo osservato ruote di tipoI in una sospensione <strong>batterica</strong> di7 × 10 10 batteri/ml ruotare a velocitàdi 2 rpm e cioè a circa il doppio dellavelocità osservata a concentrazionipiù basse (fig. 5). La dinamica dellemicrostrutture in sospensioni moltodense è però caratterizzata anche dafluttuazioni nella velocità angolare(o equivalentemente nel momentotorcente) più persistenti e di maggioreentità.Aumentando le dimensioni delle ruotepotremmo aspettarci che il momentotorcente aumenti come il quadratodelle dimensioni lineari poiché siail perimetro, e quindi il numero dibatteri che spingono, che il bracciodel momento aumentano linearmentecon la taglia del sistema. D’altra partela mobilità rotazionale delle ruotedecresce come l’inverso del cubo delledimensioni lineari. Di conseguenza ciaspettiamo che la velocità di rotazionedecresca come l’inverso del raggiodella ruota. Pertanto nel progettareruote di dimensioni maggiori (80 mm,vedi fig. 2) abbiamo cercato di ridurrele forze di attrito, scavando un bucoal centro del disco, e di aumentareil momento delle forze sagomandoanche il bordo interno con un profiloa dente di sega. Siamo riusciti aprodurre una rotazione unidirezionaledi queste ruote più grandi soltanto insospensioni molto dense e con unafrequenza rotazionale di 0.7 rpm (fig. 5)e cioè meno della metà della velocitàdi rotazione delle ruote più piccole, ilche dimostra che il nostro argomentodi scala per le velocità angolari forniscedelle previsioni solo qualitativamentecorrette.È interessante notare come un similefenomeno di rettificazione di unmoto caotico sarebbe irrealizzabilein un bagno termico all’equilibrio acausa dei vincoli imposti dal secondoprincipio della termodinamica. In unacelebre lezione, Richard Feynmandimostra come l’analisi di un dispositivoelementare, la ruota a dente di arresto(“ratchet and pawl”), possa fornireuna spiegazione semplice, in terminidi collisioni molecolari, del secondoprincipio [9]. L’argomento si sviluppaa partire dal tentativo di costruire undispositivo in grado di estrarre lavoroda un bagno termico mantenuto atemperatura costante, in evidenteviolazione del secondo principio.Il dispositivo consiste in una ruotadentata di forma asimmetrica, vincolataa ruotare in un’unica direzione da undente di arresto, e sollecitata dagli urtidelle molecole di un gas. La geometriaasimmetrica della ruota costituisceun primo ingrediente essenziale perottenere un movimento direzionale. Leleggi della dinamica, che governanol’interazione tra la ruota e le molecoledel gas, sono infatti invarianti perinversione spaziale: se la ruota fossesimmetrica allora, per ogni possibiletraiettoria del sistema in cui la ruota simuove in senso orario, ne esisterebbeuna riflessa in cui la ruota si muovein senso antiorario. Le due traiettoriesono ugualmente probabili e in mediala ruota non girerà né a destra né asinistra. In realtà Feynman dimostraingegnosamente che anche una ruotaasimmetrica con dente di arresto nonpuò ruotare in una direzione definitarettificando l’agitazione termica del gas.Le ragioni profonde di ciò risiedono inun’altra simmetria, forse più nascostadi quella per inversione spaziale, maaltrettanto fondamentale: la simmetriaper inversione temporale. Gli urti frale molecole del gas, e fra queste e laruota dentata sono perfettamentecompatibili con le leggi fisiche delladinamica se osservati a ritroso neltempo. Di nuovo la presenza di unasimmetria garantisce un bilancio equotra le traiettorie in cui la ruota gira inun verso e quelle, simmetriche rispettoal tempo, in cui la ruota gira in sensoopposto. La possibilità di ottenereun movimento direzionale richiedeallora una duplice rottura di simmetria,spaziale e temporale. La combinazionedi asimmetria spaziale e non-equilibrioè dunque alla base del cosiddetto“effetto ratchet”, ovvero la possibilitàdi estrarre lavoro dall’agitazionedisordinata dei costituenti elementaridi un sistema fuori dall’equilibrio.L’effetto ratchet gioca un ruolofondamentale in numerosi fenomenifisici e biologici, quali ad esempio imotori molecolari. In passato sono stateescogitate molte strategie per otteneresistemi fuori dall’equilibrio come adesempio l’applicazione di campi esternidipendenti dal tempo o la variazionevol26 / no3-4 / anno2010 > 51
ciclica della temperatura. Il nostro esperimento proponeuna nuova realizzazione dell’effetto ratchet dove i batterigiocano il ruolo di “molecole” intrinsecamente fuori equilibrio.Un ambiente asimmetrico può essere usato per romperele rimanenti simmetrie spaziali e permettere l’emergere diun moto ordinato e riproducibile che possa servire comemeccanismo propulsivo per micro-dispositivi completamenteautonomi. Le applicazioni più promettenti sono senzadubbio legate alla micro-movimentazione di dispositiviper microfluidica o micro-robot autopropellenti per utilizzibiologici, medici o micro-ingegneristici. Ci possiamo tuttaviaanche porre la domanda più impegnativa del possibileutilizzo dei motori batterici come sorgente energetica suscala macroscopica.Il “micromotore a <strong>propulsione</strong> <strong>batterica</strong>” è solo un esempiodi come l’incontro tra la fisica e la biologia non solo offraun’opportunità unica ai fisici di dare contributi quantitativialla biologia, ma di come la fisica stessa possa arricchirsiquando il comportamento “inusuale” della materia “attiva”biologica stimola i ricercatori a pensare in modi nuovi.RingraziamentiRingraziamo per il supporto alle ricerche il CNR, ilDipartimento di Fisica della Sapienza, l’Istituto Italiano diTecnologia e il CINECA. Desideriamo inoltre ringraziare tuttii ricercatori che hanno partecipato alla realizzazione delprototipo di micromotore a batteri: M. P. Conte, F. De Angelis,D. Dell’Arciprete, E. Di Fabrizio, V. Iebba, F. Mecarini eS. Schippa.Bibliografia[1] E. M. Purcell, “Life at low Reynolds number”, Am. J. Phys., 45 (1976) 3.[2] B. Behkam and M. Sitti, “Effect of quantity and configuration ofattached bacteria on bacterial propulsion of microbeads”, Appl. Phys.Lett., 93 (2008) 223901.[3] N. Darnton, L. Turner, K. Breuer, H. C. Berg, “Moving fluid withbacterial carpets”, Biophys. J., 86 (2004) 1863.[4] D. B. Weibel, et al., “Microoxen: Microorganisms to move microscaleloads”, Proc. Natl. Acad. Sci. U.S.A., 102 (2005) 11963.[5] E. Steager, C. B. Kim, J. Patel, S. Bith, C. Naik, “Control ofmicrofabricated structures powered by flagellated bacteria usingphototaxis”, Appl. Phys. Lett., 90 (2007) 263901.[6] P. Curie, “Sur la symetrie dans les phénomènes physiques, symetried’un champ électrique et d’un champ magnétique”,J. Phys. (Paris), 3 (1894), 393.[7] L. Angelani, R. Di Leonardo, G. Ruocco, “Self-starting micromotorsin a bacterial bath”, Phys. Rev. Lett., 102 (2009) 048104.[8] R. Di Leonardo et al. Proc. Natl. Acad. Sci. USA, 107 (2010) 9541.[9] R. P. Feynman, L. B. Leighton, and M. Sands,“The Feynman Lectures on Physics” Vol. I (Addison Wesley, Reading,MA)1966, Chapt. 46.Roberto Di LeonardoRoberto Di Leonardo è ricercatore del CNRpresso l’unità di Roma dell’Istituto per iProcessi Chimico-Fisici. Nato a Pescara nel 1973,frequenta i corsi di laurea e dottorato in fisica aL’Aquila, svolgendo attività di ricerca su liquidisottoraffreddati e transizione vetrosa. A partiredal 2005 la sua attività di ricerca si concentrasull’utilizzo della luce come strumento dimanipolazione della materia sulla scala delmicrometro e nel 2007 riceve il premio “LeScienze” per le applicazioni delle trappoleottiche alla meccanica statistica, materia sofficee microfluidica.Luca AngelaniLuca Angelani è ricercatore del CNR pressol’unità di Roma dell’Istituto per i ProcessiChimico-Fisici. Nato a Roma nel 1969, laureatoin Fisica alla “Sapienza” di Roma, dottorato aL’Aquila, successivamente ha svolto attività diricerca a Trento e Roma. I suoi interessi scientificiriguardano la fisica dei sistemi disordinati, daivetri ai liquidi e recentemente sistemi biologicie materia attiva, integrando metodi teorici enumerici. Attualmente è responsabile dellalinea di ricerca del CNR “Dinamica dei sistemidisordinati: materia soffice e biologica”.Giancarlo RuoccoGiancarlo Ruocco è professore di Struttura dellaMateria presso il Dipartimento di Fisica della“Sapienza”, Università di Roma. Nato a Roma nel1959, si laurea in Fisica nel 1981, diviene primaricercatore (1984) e poi professore associato(1992) all’Università di L’Aquila. I suoi interessiscientifici riguardano i liquidi, i vetri e la materiasoffice. Nel 2000 diviene professore ordinarioalla “Sapienza”, nel 2004 fonda il centro diricerca “Soft” dell’INFM, di cui è direttore fino al2008. Dal 2007 è direttore del Dipartimento diFisica della “Sapienza”.52 < il nuovo saggiatore