

Rapport Normadie klassen
Rapport Normadie klassen
Rapport Normadie klassen

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
P R O S J E K T R A P P O R T G R U P P E 6<br />
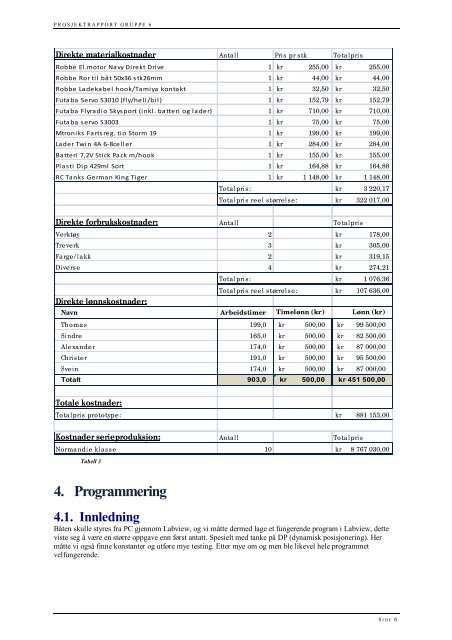
Direkte materialkostnader Antal l Pris pr stk Tota lpri s<br />
Robbe El.motor Navy Direkt Drive 1 kr 255,00 kr 255,00<br />
Robbe Ror til bå t 50x36 s tk26mm 1 kr 44,00 kr 44,00<br />
Robbe La deka bel hook/Tamiya konta kt 1 kr 32,50 kr 32,50<br />
Futa ba Servo S3010 (fly/heli /bil ) 1 kr 152,79 kr 152,79<br />
Futa ba Flyradio Skysport (i nkl . ba tteri og la der) 1 kr 710,00 kr 710,00<br />
Futa ba servo S3003 1 kr 75,00 kr 75,00<br />
Mtroniks Fa rtsreg. tio Storm 19 1 kr 199,00 kr 199,00<br />
Lader Twi n 4A 6-8cell er 1 kr 284,00 kr 284,00<br />
Batteri 7,2V Stick Pa ck m/hook 1 kr 155,00 kr 155,00<br />
Pl asti Di p 429ml Sort 1 kr 164,88 kr 164,88<br />
RC Tanks German King Ti ger 1 kr 1 148,00 kr 1 148,00<br />
Direkte forbrukskostnader: Antal l Tota lpri s<br />
kr<br />
kr<br />
3 220,17<br />
322 017,00<br />
Verktøy 2 kr 178,00<br />
Treverk 3 kr 305,00<br />
Fa rge/la kk 2 kr 319,15<br />
Diverse 4 kr 274,21<br />
Direkte lønnskostnader:<br />
kr<br />
kr<br />
1 076,36<br />
107 636,00<br />
Navn Arbeidstimer Timelønn (kr) Lønn (kr)<br />
Thoma s 199,0 kr 500,00 kr 99 500,00<br />
Si ndre 165,0 kr 500,00 kr 82 500,00<br />
Alexander 174,0 kr 500,00 kr 87 000,00<br />
Chri ster 191,0 kr 500,00 kr 95 500,00<br />
Svein 174,0 kr 500,00 kr 87 000,00<br />
Totalt 903,0 kr 500,00 kr 451 500,00<br />
Totale kostnader:<br />
Tota lpris prototype: kr 881 153,00<br />
Kostnader serieproduksjon: Antal l Tota lpri s<br />
Norma ndie kl asse 10 kr 8 767 030,00<br />
Tabell 3<br />
4. Programmering<br />
Total pri s:<br />
Total pri s reel størrel se:<br />
Total pri s:<br />
Total pri s reel størrel se:<br />
4.1. Innledning<br />
Båten skulle styres fra PC gjennom Labview, og vi måtte dermed lage et fungerende program i Labview, dette<br />
viste seg å være en større oppgave enn først antatt. Spesielt med tanke på DP (dynamisk posisjonering). Her<br />
måtte vi også finne konstanter og utføre mye testing. Etter mye om og men ble likevel hele programmet<br />
velfungerende.<br />
S I D E 6



