Controle de Motores CC - Mecatrônica Atual
Controle de Motores CC - Mecatrônica Atual
Controle de Motores CC - Mecatrônica Atual

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
1<br />
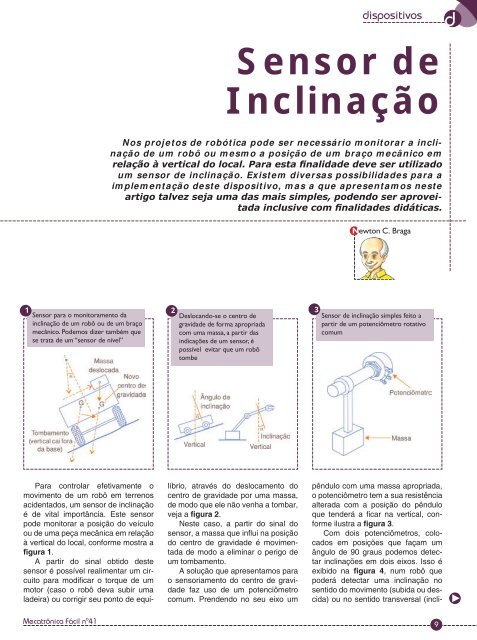
Sensor para o monitoramento da<br />
inclinação <strong>de</strong> um robô ou <strong>de</strong> um braço<br />
mecânico. Po<strong>de</strong>mos dizer também que<br />
se trata <strong>de</strong> um “sensor <strong>de</strong> nível”<br />
Para controlar efetivamente o<br />
movimento <strong>de</strong> um robô em terrenos<br />
aci<strong>de</strong>ntados, um sensor <strong>de</strong> inclinação<br />
é <strong>de</strong> vital importância. Este sensor<br />
po<strong>de</strong> monitorar a posição do veículo<br />
ou <strong>de</strong> uma peça mecânica em relação<br />
à vertical do local, conforme mostra a<br />
figura 1.<br />
A partir do sinal obtido <strong>de</strong>ste<br />
sensor é possível realimentar um circuito<br />
para modificar o torque <strong>de</strong> um<br />
motor (caso o robô <strong>de</strong>va subir uma<br />
la<strong>de</strong>ira) ou corrigir seu ponto <strong>de</strong> equi-<br />
<strong>Mecatrônica</strong> Fácil nº41<br />
dispositivos d<br />
Sensor <strong>de</strong><br />
Inclinação<br />
Nos projetos <strong>de</strong> robótica po<strong>de</strong> ser necessário monitorar a inclinação<br />
<strong>de</strong> um robô ou mesmo a posição <strong>de</strong> um braço mecânico em<br />
relação à vertical do local. Para esta finalida<strong>de</strong> <strong>de</strong>ve ser utilizado<br />
um sensor <strong>de</strong> inclinação. Existem diversas possibilida<strong>de</strong>s para a<br />
implementação <strong>de</strong>ste dispositivo, mas a que apresentamos neste<br />
artigo talvez seja uma das mais simples, po<strong>de</strong>ndo ser aproveitada<br />
inclusive com finalida<strong>de</strong>s didáticas.<br />
2 Deslocando-se o centro <strong>de</strong><br />
gravida<strong>de</strong> <strong>de</strong> forma apropriada<br />
com uma massa, a partir das<br />
indicações <strong>de</strong> um sensor, é<br />
possível evitar que um robô<br />
tombe<br />
líbrio, através do <strong>de</strong>slocamento do<br />
centro <strong>de</strong> gravida<strong>de</strong> por uma massa,<br />
<strong>de</strong> modo que ele não venha a tombar,<br />
veja a figura 2.<br />
Neste caso, a partir do sinal do<br />
sensor, a massa que influi na posição<br />
do centro <strong>de</strong> gravida<strong>de</strong> é movimentada<br />
<strong>de</strong> modo a eliminar o perigo <strong>de</strong><br />
um tombamento.<br />
A solução que apresentamos para<br />
o sensoriamento do centro <strong>de</strong> gravida<strong>de</strong><br />
faz uso <strong>de</strong> um potenciômetro<br />
comum. Pren<strong>de</strong>ndo no seu eixo um<br />
Newton C. Braga<br />
3 Sensor <strong>de</strong> inclinação simples feito a<br />
partir <strong>de</strong> um potenciômetro rotativo<br />
comum<br />
pêndulo com uma massa apropriada,<br />
o potenciômetro tem a sua resistência<br />
alterada com a posição do pêndulo<br />
que ten<strong>de</strong>rá a ficar na vertical, conforme<br />
ilustra a figura 3.<br />
Com dois potenciômetros, colocados<br />
em posições que façam um<br />
ângulo <strong>de</strong> 90 graus po<strong>de</strong>mos <strong>de</strong>tectar<br />
inclinações em dois eixos. Isso é<br />
exibido na figura 4, num robô que<br />
po<strong>de</strong>rá <strong>de</strong>tectar uma inclinação no<br />
sentido do movimento (subida ou <strong>de</strong>scida)<br />
ou no sentido transversal (incli-