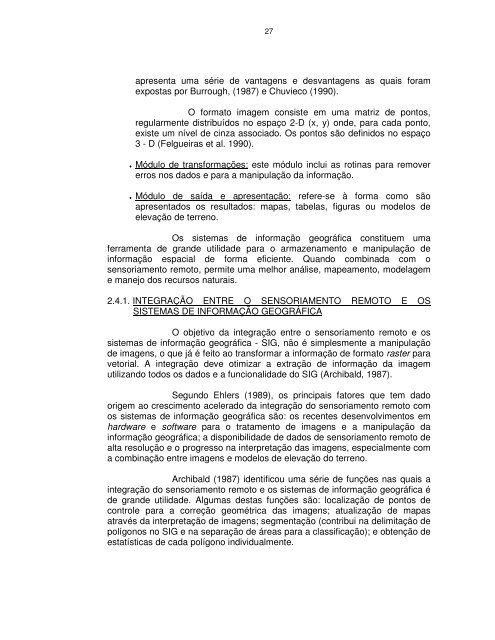
26volume de informações espaciais existentes, provenientes de diversas fontesdentre as quais se destaca o sensoriamento remoto.As principais características de um sistema de informaçãogeográfica são: integrar em uma única base de dados, as informaçõesespaciais provenientes de dados de diversas fontes; relacionar diferentes tiposde informações através de algoritmos de manipulação, de maneira a gerarmapeamentos derivados; e permitir a consulta, recuperação, visualização eatualização do conteúdo das bases de dados (Câmara, 1993).Para Burrough (1987), a estrutura básica de um sistema deinformação geográfica consiste em cinco módulos:♦ Módulo de interação com o usuário: através do qual se faz a entrada decomandos ao sistema.♦ Módulo de entrada de dados: para Chuvieco (1990) a entrada de dadosconstitui a função mais importante de um SIG, já que, para poder efetuaruma análise integrada das variáveis provenientes de diversas fontes, épreciso que estas sejam compatíveis quanto ao suporte digital, aoformato e ao sistema de referência.A entrada de dados pode ser feita através do teclado, pormeio de um digitalizador, ou através de um scanner. O teclado permite aentrada de dados contidos em tabelas, descrições breves ou dadospontuais, como os dados climáticos e os demográficos. Os mapas sãoincorporados ao sistema, geralmente através de mesas digitalizadorasou scanners, sendo estes últimos também utilizados para a incorporaçãode imagens de satélites e fotografias aéreas. No caso de imagens emformato digital, os softwares devem permitir a entrada das mesmas,como mais um plano de informação.♦ Módulo de armazenamento e organização de dados: refere-se à formacomo estão organizados os dados dentro do sistema. SegundoBurrough (1987) e Zee e Huizing (1988), existem duas estruturas dearmazenamento dos dados, a grade (raster) e a vetorial. No entanto,além destes, Felgueiras et al. (1990) consideram mais dois formatos, oformato imagem e o formato amostras em três dimensões.A estrutura grade consiste em um arranjo de celas, cadauma referenciada por linha e coluna, e o atributo a ser mapeado érepresentado por um número. Por outro lado, na estrutura vetorial, ospontos, as linhas e os polígonos estão associados a um atributo e sãodefinidos pelas coordenadas x e y, representando a longitude e alatitude, respectivamente (Burrough, 1987). Cada uma destas estruturas
27apresenta uma série de vantagens e desvantagens as quais foramexpostas por Burrough, (1987) e Chuvieco (1990).O formato imagem consiste em uma matriz de pontos,regularmente distribuídos no espaço 2-D (x, y) onde, para cada ponto,existe um nível de cinza associado. Os pontos são definidos no espaço3 - D (Felgueiras et al. 1990).♦ Módulo de transformações: este módulo inclui as rotinas para removererros nos dados e para a manipulação da informação.♦ Módulo de saída e apresentação: refere-se à forma como sãoapresentados os resultados: mapas, tabelas, figuras ou modelos deelevação de terreno.Os sistemas de informação geográfica constituem umaferramenta de grande utilidade para o armazenamento e manipulação deinformação espacial de forma eficiente. Quando combinada com osensoriamento remoto, permite uma melhor análise, mapeamento, modelageme manejo dos recursos naturais.2.4.1. INTEGRAÇÃO ENTRE O SENSORIAMENTO REMOTO E OSSISTEMAS DE INFORMAÇÃO GEOGRÁFICAO objetivo da integração entre o sensoriamento remoto e ossistemas de informação geográfica - SIG, não é simplesmente a manipulaçãode imagens, o que já é feito ao transformar a informação de formato raster paravetorial. A integração deve otimizar a extração de informação da imagemutilizando todos os dados e a funcionalidade do SIG (Archibald, 1987).Segundo Ehlers (1989), os principais fatores que tem dadoorigem ao crescimento acelerado da integração do sensoriamento remoto comos sistemas de informação geográfica são: os recentes desenvolvimentos emhardware e software para o tratamento de imagens e a manipulação dainformação geográfica; a disponibilidade de dados de sensoriamento remoto dealta resolução e o progresso na interpretação das imagens, especialmente coma combinação entre imagens e modelos de elevação do terreno.Archibald (1987) identificou uma série de funções nas quais aintegração do sensoriamento remoto e os sistemas de informação geográfica éde grande utilidade. Algumas destas funções são: localização de pontos decontrole para a correção geométrica das imagens; atualização de mapasatravés da interpretação de imagens; segmentação (contribui na delimitação depolígonos no SIG e na separação de áreas para a classificação); e obtenção deestatísticas de cada polígono individualmente.
- Page 1: INPE-6824-TDI/644SENSORIAMENTO REMO
- Page 7 and 8: AGRADECIMENTOSAgradeço às seguint
- Page 9: RESUMOCom a recente implantação d
- Page 13 and 14: SUMÁRIOPág.LISTA DE FIGURAS......
- Page 15: 5.6.1. Caracterização fisionômic
- Page 19: LISTA DE TABELASPág.2.1 - Equaçõ
- Page 22 and 23: 2Estes trabalhos de quantificação
- Page 25 and 26: 5CAPÍTULO 2FUNDAMENTAÇÃO TEÓRIC
- Page 27 and 28: 7Como parte de um estudo de etnobot
- Page 29 and 30: 9Para o estudo da vegetação, é p
- Page 31 and 32: 11A luz incidente em uma planta com
- Page 33 and 34: 13mostraram que a reflectância da
- Page 35 and 36: 152.3. INTERPRETAÇÃO DE IMAGENSA
- Page 37 and 38: 17geometria de aquisição conhecid
- Page 39 and 40: 19cartográfica, para o qual se tor
- Page 41 and 42: 21b) Transformação por Componente
- Page 43 and 44: 23Com a finalidade de evitar uma ex
- Page 45: 25da classificação, sendo este pr
- Page 49 and 50: 29CAPÍTULO 3ÁREA DE ESTUDO3.1. LO
- Page 51 and 52: 313.2.3. SOLOSOs solos predominante
- Page 53 and 54: 334.1. MATERIAIS UTILIZADOSCAPÍTUL
- Page 55 and 56: 35Definição do ProjetoSeleção d
- Page 57 and 58: 37C´ = Ganho ∗ C - Offsetonde:C
- Page 59 and 60: 39No caso do triplete formado pelas
- Page 61 and 62: 41o valor mínimo pre-estabelecido.
- Page 63: 43amostras selecionas, levando em c
- Page 66 and 67: 465.1.3. FLORESTA DE VÁRZEAAs flor
- Page 68 and 69: 48Planície de InundaçãoP Planalt
- Page 70 and 71: 50até a obtenção de um resultado
- Page 72 and 73: 52Variância4540353025201510501 2 3
- Page 75 and 76: 55atingir 8 destes pontos devido à
- Page 77 and 78: 57Fig. 5.4 - Perfil fisionômico-es
- Page 79: 59Percentagem de indivíduos6050403
- Page 83 and 84: 63Fig. 5.7 - Perfil fisionômico-es
- Page 85 and 86: 65Fig. 5.8 - Perfil fisionômico-es
- Page 87 and 88: 67Fig. 5.9 - Perfil fisionômico-es
- Page 89 and 90: 6970Percentagem deindivíduos605040
- Page 91 and 92: 71toneladas/hectare, sendo que não
- Page 93 and 94: 73de várzea se apresenta com uma t
- Page 95 and 96: 75entre as classes, seguida pela ba
- Page 97 and 98:
77A Tabela 5.7 apresenta a matriz d
- Page 99 and 100:
79A imagem resultante desta classif
- Page 101 and 102:
81TABELA 5.8 - COMPARAÇÃO DO DESE
- Page 103 and 104:
82As classes correspondentes às ca
- Page 105:
84uniformização de temas, foi pre
- Page 109 and 110:
88geradas não melhoraram a discrim
- Page 112 and 113:
91REFERÊNCIAS BIBLIOGRÁFICASAhern
- Page 116 and 117:
95Jackson, R.D.; Pinter Jr., P.J. S
- Page 118 and 119:
97Qiu, Z.C.; Goldberg, M. A new cla
- Page 120 and 121:
99Venturieri, A. Segmentação de i
- Page 122 and 123:
101APÊNDICE APLANILHA UTILIZADA NO
- Page 124 and 125:
103APÊNDICE BLISTA DE FAMÍLIAS, G
- Page 126 and 127:
Trattinickia burserifolia Mart. Bre
- Page 128 and 129:
Couratari sp Tauari FTFEschweilera
- Page 130 and 131:
Guarea cf. carinata Ducke FTF, CTri
- Page 132:
Pouteria cf. krukovii (A.C. Smith)