PLMì íµí ë¹ì¦ëì¤ì íì - IBM
PLMì íµí ë¹ì¦ëì¤ì íì - IBM
PLMì íµí ë¹ì¦ëì¤ì íì - IBM
- No tags were found...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
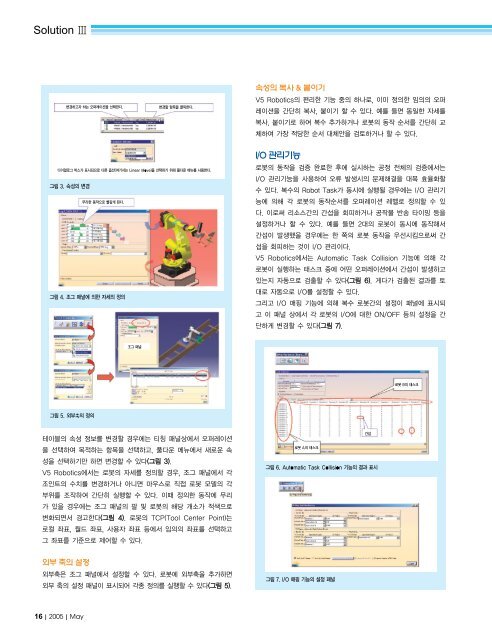
Solution Ⅲ변경하고자 하는 오퍼레이션을 선택한다.변경할 항목을 클릭한다.속성의 복사 & 붙이기V5 Robotics의 편리한 기능 중의 하나로, 이미 정의한 임의의 오퍼레이션을 간단히 복사, 붙이기할수있다. 예를들면동일한자세를복사, 붙이기로 하여 복수 추가하거나 로봇의 동작 순서를 간단히 교체하여 가장 적당한 순서 대체안을 검토하거나 할 수 있다.다이얼로그 박스가 표시되므로 다른 옵션(여기서는 Linear Move)을 선택하기 위해 풀다운 메뉴를 사용한다.그림 3. 속성의 변경무리한 동작으로 빨갛게 된다.그림 4. 조그 패널에 의한 자세의 정의I/O 관리기능로봇의 동작을 검증 완료한 후에 실시하는 공정 전체의 검증에서는I/O 관리기능을 사용하여 오류 발생시의 문제해결을 대폭 효율화할수 있다. 복수의 Robot Task가 동시에 실행될 경우에는 I/O 관리기능에 의해 각 로봇의 동작순서를 오퍼레이션 레벨로 정의할 수 있다. 이로써 리소스간의 간섭을 회피하거나 공작물 반송 타이밍 등을설정하거나 할 수 있다. 예를 들면 2대의 로봇이 동시에 동작해서간섭이 발생했을 경우에는 한 쪽의 로봇 동작을 우선시킴으로써 간섭을 회피하는 것이 I/O 관리이다.V5 Robotics에서는 Automatic Task Collision 기능에 의해 각로봇이 실행하는 태스크 중에 어떤 오퍼레이션에서 간섭이 발생하고있는지 자동으로 검출할 수 있다(그림 6). 게다가 검출된 결과를 토대로 자동으로 I/O를 설정할 수 있다.그리고 I/O 매핑 기능에 의해 복수 로봇간의 설정이 패널에 표시되고 이 패널 상에서 각 로봇의 I/O에 대한 ON/OFF 등의 설정을 간단하게 변경할 수 있다(그림 7).조그 패널로봇 B의 태스크그림 5. 외부축의 정의테이블의 속성 정보를 변경할 경우에는 티칭 패널상에서 오퍼레이션을 선택하여 목적하는 항목을 선택하고, 풀다운 메뉴에서 새로운 속성을 선택하기만 하면 변경할 수 있다(그림 3).V5 Robotics에서는 로봇의 자세를 정의할 경우, 조그 패널에서 각조인트의 수치를 변경하거나 아니면 마우스로 직접 로봇 모델의 각부위를 조작하여 간단히 실행할 수 있다. 이때 정의한 동작에 무리가 있을 경우에는 조그 패널의 팔 및 로봇의 해당 개소가 적색으로변화되면서 경고한다(그림 4). 로봇의 TCP(Tool Center Point)는로컬 좌표, 월드 좌표, 사용자 좌표 등에서 임의의 좌표를 선택하고그 좌표를 기준으로 제어할 수 있다.로봇 A의 태스크간섭그림 6. Automatic Task Collision 기능의 결과 표시외부 축의 설정외부축은 조그 패널에서 설정할 수 있다. 로봇에 외부축을 추가하면외부 축의 설정 패널이 표시되어 각종 정의를 실행할 수 있다(그림 5).그림 7. I/O 매핑 기능의 설정 패널16|2005|May
![Microsoft PowerPoint - [MNC]IBM Security_\300\316\274\342\272](https://img.yumpu.com/51209374/1/190x134/microsoft-powerpoint-mncibm-security-300316274342272.jpg?quality=85)
![ëë
[;ëë§ì ë
í¹í] ì¤íì¼, ë°ì´í°ì¼í° ì§ê¸° - IBM](https://img.yumpu.com/51159373/1/190x131/eeeei-eii-iii-1-4-eiii-1-4-i-ie-ibm.jpg?quality=85)