Pregled metoda za automatsku detekciju i prepoznavanje ... - FESB
Pregled metoda za automatsku detekciju i prepoznavanje ... - FESB
Pregled metoda za automatsku detekciju i prepoznavanje ... - FESB

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
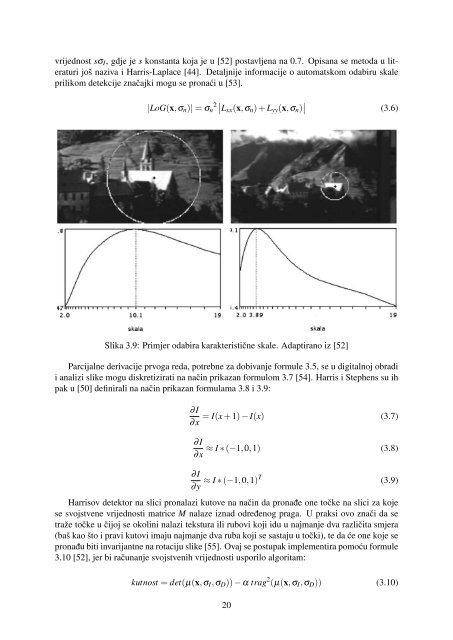
vrijednost sσI, gdje je s konstanta koja je u [52] postavljena na 0.7. Opisana se <strong>metoda</strong> u literaturi<br />
još naziva i Harris-Laplace [44]. Detaljnije informacije o automatskom odabiru skale<br />
prilikom detekcije značajki mogu se pronaći u [53].<br />
|LoG(x,σn)| = σn 2 � � Lxx(x,σn) + Lyy(x,σn) � � (3.6)<br />
Slika 3.9: Primjer odabira karakteristične skale. Adaptirano iz [52]<br />
Parcijalne derivacije prvoga reda, potrebne <strong>za</strong> dobivanje formule 3.5, se u digitalnoj obradi<br />
i analizi slike mogu diskretizirati na način prika<strong>za</strong>n formulom 3.7 [54]. Harris i Stephens su ih<br />
pak u [50] definirali na način prika<strong>za</strong>n formulama 3.8 i 3.9:<br />
∂I<br />
= I(x + 1) − I(x) (3.7)<br />
∂x<br />
∂I<br />
≈ I ∗ (−1,0,1) (3.8)<br />
∂x<br />
∂I<br />
≈ I ∗ (−1,0,1)T<br />
∂y<br />
(3.9)<br />
Harrisov detektor na slici pronalazi kutove na način da prona ¯de one točke na slici <strong>za</strong> koje<br />
se svojstvene vrijednosti matrice M nalaze iznad odre ¯denog praga. U praksi ovo znači da se<br />
traže točke u čijoj se okolini nalazi tekstura ili rubovi koji idu u najmanje dva različita smjera<br />
(baš kao što i pravi kutovi imaju najmanje dva ruba koji se sastaju u točki), te da će one koje se<br />
prona ¯du biti invarijantne na rotaciju slike [55]. Ovaj se postupak implementira pomoću formule<br />
3.10 [52], jer bi računanje svojstvenih vrijednosti usporilo algoritam:<br />
kutnost = det(µ(x,σI,σD)) − α trag 2 (µ(x,σI,σD)) (3.10)<br />
20