
You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Inovace výuky předmětu Robotika v lékařství<br />
r<br />
x<br />
FO<br />
O=A<br />
z<br />
α<br />
Fi<br />
MO<br />
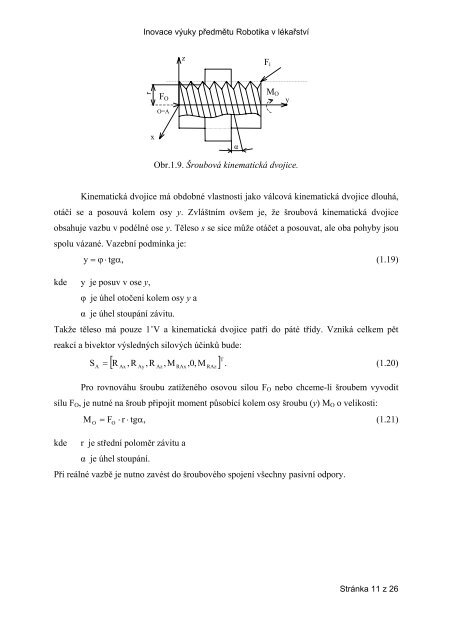
Obr.1.9. Šroubová kinematická <strong>dvojice</strong>.<br />
<strong>Kinematická</strong> <strong>dvojice</strong> má obdobné vlastnosti jako válcová kinematická <strong>dvojice</strong> dlouhá,<br />
otáčí se a posouvá kolem osy y. Zvláštním ovšem je, že šroubová kinematická <strong>dvojice</strong><br />
obsahuje vazbu v podélné ose y. Těleso s se sice může otáčet a posouvat, ale oba pohyby jsou<br />
spolu vázané. Vazební podmínka je:<br />
y = ϕ ⋅ tgα,<br />
(1.19)<br />
kde y je posuv v ose y,<br />
φ je úhel otočení kolem osy y a<br />
α je úhel stoupání závitu.<br />
Takže těleso má pouze 1˚V a kinematická <strong>dvojice</strong> patří do páté třídy. Vzniká celkem pět<br />
reakcí a bivektor výsledných silových účinků bude:<br />
S<br />
T<br />
[ R , R , R , M , 0,<br />
M ] .<br />
A = Ax Ay Az RAx RAz<br />
(1.20)<br />
Pro rovnováhu šroubu zatíženého osovou silou FO nebo chceme-li šroubem vyvodit<br />
sílu FO, je nutné na šroub připojit moment působící kolem osy šroubu (y) MO o velikosti:<br />
M O O<br />
= F ⋅ r ⋅ tgα,<br />
(1.21)<br />
kde r je střední poloměr závitu a<br />
α je úhel stoupání.<br />
Při reálné vazbě je nutno zavést do šroubového spojení všechny pasivní odpory.<br />
y<br />
Stránka 11 z 26