
Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Inovace výuky předmětu Robotika v lékařství<br />
realizovanými v příslušných hnacích kinematických dvojicích a jeho strukturní schéma je:<br />
Rz – Pz - Ry<br />
Ry<br />
Px4<br />
Ry – Px – Rz - Rx.<br />
Poznámka: U posuvné kinematické <strong>dvojice</strong> P2 se ve strukturním schématu objevuje index x4.<br />
Toto je dáno skutečností, že v základní poloze kinematického řetězce není osa x4<br />
souřadnicového systému členu 4 rovnoběžná s osou x, základního systému.<br />
φ32<br />
φ21<br />
2<br />
z<br />
R2<br />
O<br />
R1<br />
3<br />
x43<br />
P1<br />
y<br />
1<br />
4<br />
platí:<br />
x<br />
2.5 obsahuje šest stupňů volnosti, daných šesticí nezávislých souřadnic, které realizuje šest<br />
Stránka 16 z 26<br />
R3<br />
φ54<br />
M<br />
5<br />
R1 = Rz P1 = Px<br />
R2 = Ry<br />
R3 = Rx<br />
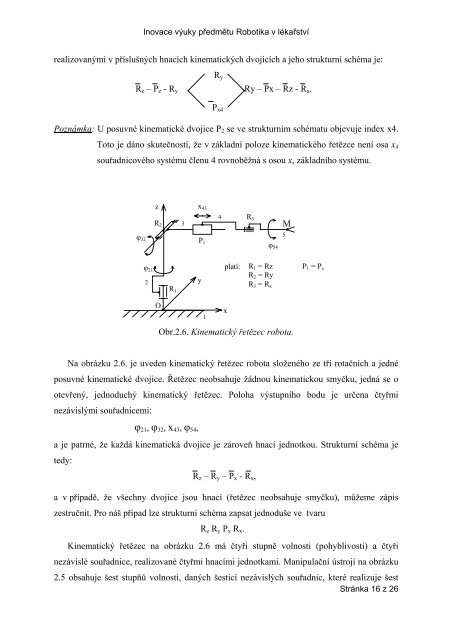
Obr.2.6. Kinematický řetězec robota.<br />
Na obrázku 2.6. je uveden kinematický řetězec robota složeného ze tří rotačních a jedné<br />
posuvné kinematické <strong>dvojice</strong>. Řetězec neobsahuje žádnou kinematickou smyčku, jedná se o<br />
otevřený, jednoduchý kinematický řetězec. Poloha výstupního bodu je určena čtyřmi<br />
nezávislými souřadnicemi:<br />
φ21, φ32, x43, φ54,<br />
a je patrné, že každá kinematická <strong>dvojice</strong> je zároveň hnací jednotkou. Strukturní schéma je<br />
tedy:<br />
Rz – Ry – Px - Rx,<br />
a v případě, že všechny <strong>dvojice</strong> jsou hnací (řetězec neobsahuje smyčku), můžeme zápis<br />
zestručnit. Pro náš případ lze strukturní schéma zapsat jednoduše ve tvaru<br />
Rz Ry Px Rx.<br />
Kinematický řetězec na obrázku 2.6 má čtyři stupně volnosti (pohyblivosti) a čtyři<br />
nezávislé souřadnice, realizované čtyřmi hnacími jednotkami. Manipulační ústrojí na obrázku