SRI986 Pozycjoner elektro-pneumatyczny - FOXBORO ECKARDT
SRI986 Pozycjoner elektro-pneumatyczny - FOXBORO ECKARDT
SRI986 Pozycjoner elektro-pneumatyczny - FOXBORO ECKARDT

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
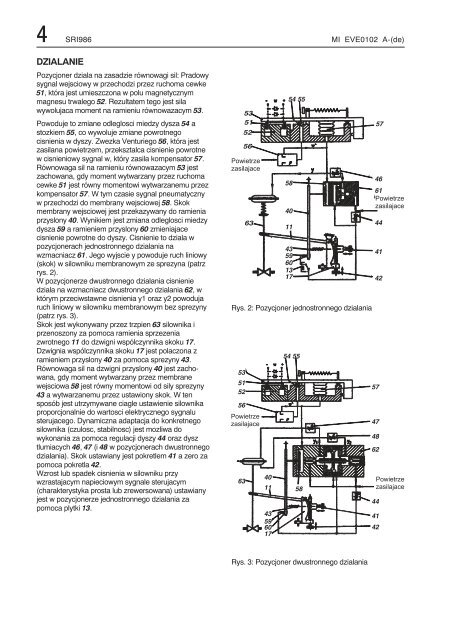
4 <strong>SRI986</strong> MI EVE0102 A-(de)DZIALANIE<strong>Pozycjoner</strong> dziala na zasadzie równowagi sil: Pradowysygnal wejsciowy w przechodzi przez ruchoma cewke51, która jest umieszczona w polu magnetycznymmagnesu trwalego 52. Rezultatem tego jest silawywolujaca moment na ramieniu równowazacym 53.Powoduje to zmiane odleglosci miedzy dysza 54 astozkiem 55, co wywoluje zmiane powrotnegocisnienia w dyszy. Zwezka Venturiego 56, która jestzasilana powietrzem, przeksztalca cisnienie powrotnew cisnieniowy sygnal w, który zasila kompensator 57.Równowaga sil na ramieniu równowazacym 53 jestzachowana, gdy moment wytwarzany przez ruchomacewke 51 jest równy momentowi wytwarzanemu przezkompensator 57. W tym czasie sygnal <strong>pneumatyczny</strong>w przechodzi do membrany wejsciowej 58. Skokmembrany wejsciowej jest przekazywany do ramieniaprzyslony 40. Wynikiem jest zmiana odleglosci miedzydysza 59 a ramieniem przyslony 60 zmieniajacecisnienie powrotne do dyszy. Cisnienie to dziala wpozycjonerach jednostronnego dzialania nawzmacniacz 61. Jego wyjscie y powoduje ruch liniowy(skok) w silowniku membranowym ze sprezyna (patrzrys. 2).W pozycjonerze dwustronnego dzialania cisnieniedziala na wzmacniacz dwustronnego dzialania 62,wktórym przeciwstawne cisnienia y1 oraz y2 powodujaruch liniowy w silowniku membranowym bez sprezyny(patrz rys. 3).Skok jest wykonywany przez trzpien 63 silownika iprzenoszony za pomoca ramienia sprzezeniazwrotnego 11 do dzwigni wspólczynnika skoku 17.Dzwignia wspólczynnika skoku 17 jest polaczona zramieniem przyslony 40 za pomoca sprezyny 43.Równowaga sil na dzwigni przyslony 40 jest zachowana,gdy moment wytwarzany przez membranewejsciowa 58 jest równy momentowi od sily sprezyny43 a wytwarzanemu przez ustawiony skok. W tensposób jest utrzymywane ciagle ustawienie silownikaproporcjonalnie do wartosci elektrycznego sygnalusterujacego. Dynamiczna adaptacja do konkretnegosilownika (czulosc, stabilnosc) jest mozliwa dowykonania za pomoca regulacji dyszy 44 oraz dysztlumiacych 46, 47 (i 48 w pozycjonerach dwustronnegodzialania). Skok ustawiany jest pokretlem 41 azerozapomoca pokretla 42.Wzrost lub spadek cisnienia w silowniku przywzrastajacym napieciowym sygnale sterujacym(charakterystyka prosta lub zrewersowana) ustawianyjest w pozycjonerze jednostronnego dzialania zapomoca plytki 13.# !# ## $$ !# !# ## $2 M EA JH A = I E= = ? A$ !2 M EA JH A = I E= = ? A" " !# '$ %# &" " !# '$ ! %# " # #Rys. 2: <strong>Pozycjoner</strong> jednostronnego dzialania# " # ## &# %" %" &$" "# %" $$ 2 M EA JH A = I E= = ? A" "" "" "2 M EA JH A = I E= = ? ARys. 3: <strong>Pozycjoner</strong> dwustronnego dzialania