Anwendungen des Lagrange-Formalismus an ... - GSI - Theory
Anwendungen des Lagrange-Formalismus an ... - GSI - Theory
Anwendungen des Lagrange-Formalismus an ... - GSI - Theory

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
1 Theoretische Grundlagen<br />
1.1 Verallgemeinerte Koordinaten<br />
Aus der Newtonschen Mech<strong>an</strong>ik ist bereits bek<strong>an</strong>nt, dass es nicht immer sinnvoll ist, die<br />
Bewegungsgleichungen in kartesischen Koordinaten aufzustellen. Diese erschweren die<br />
Lösung oder machen sie überhaupt erst gar nicht möglich. Beim <strong>Lagr<strong>an</strong>ge</strong> <strong>Formalismus</strong><br />
gilt es verallgemeinerte (generalisierte) Koordinaten zu verwenden. Als generalisierte<br />
Koordinaten werden alle Größen bezeichnet, die die Konfiguration eines Systems kennzeichnen.<br />
Die Gleichung<br />
xj = xj(q1,...,q3N,t) (1.1)<br />
stellt den Zusammenh<strong>an</strong>g zwischen kartesischen und verallgemeinerten Koordinaten eines<br />
N-Teilchensystems dar. Ein N-Teilchensystem besitzt 3N unabhängige Koordinaten<br />
und 3N Freiheitsgrade.<br />
(vgl. [4], S.2)<br />
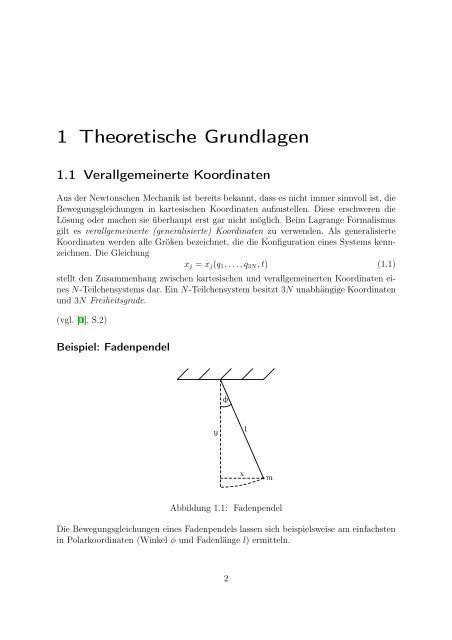
Beispiel: Fadenpendel<br />
y<br />
φ<br />
x<br />
l<br />
m<br />
Abbildung 1.1: Fadenpendel<br />
Die Bewegungsgleichungen eines Fadenpendels lassen sich beispielsweise am einfachsten<br />
in Polarkoordinaten (Winkel φ und Fadenlänge l) ermitteln.<br />
2