Skript
Skript
Skript

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
Kapitel 5 Analoge Schaltungstechnik Integrierte Schaltungen II<br />
5 Integrierte Schaltungstechnik<br />
Elektronische und insbesondere integrierte Schaltungen dienen der Verarbeitung elektrischer<br />
Signale.<br />
Grobe Klassifizierung:<br />
Analoge Signale - Analoge Schaltungstechnik<br />
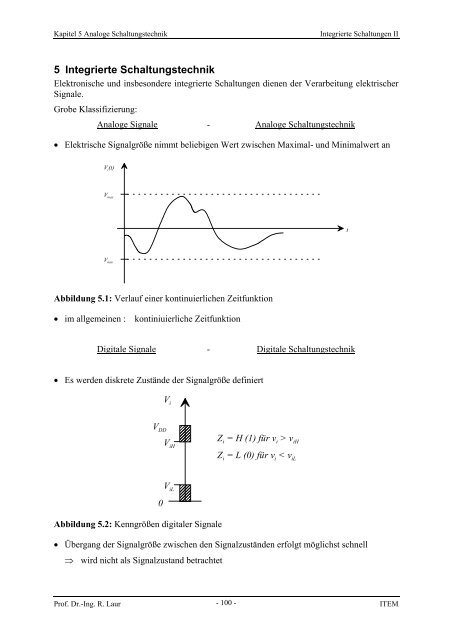
• Elektrische Signalgröße nimmt beliebigen Wert zwischen Maximal- und Minimalwert an<br />
V i(t)<br />
V max<br />
V min<br />
Abbildung 5.1: Verlauf einer kontinuierlichen Zeitfunktion<br />
• im allgemeinen : kontiniuierliche Zeitfunktion<br />
Digitale Signale - Digitale Schaltungstechnik<br />
• Es werden diskrete Zustände der Signalgröße definiert<br />
V i<br />
VDD ViH V iL<br />
<br />
<br />
<br />
<br />
Abbildung 5.2: Kenngrößen digitaler Signale<br />
0<br />
Z i = H (1) für v i > v iH<br />
Z i = L (0) für v i < v iL<br />
• Übergang der Signalgröße zwischen den Signalzuständen erfolgt möglichst schnell<br />
⇒ wird nicht als Signalzustand betrachtet<br />
Prof. Dr.-Ing. R. Laur - 100 -<br />
ITEM<br />
t
Kapitel 5 Analoge Schaltungstechnik Integrierte Schaltungen II<br />
V i(t)<br />
V iH<br />
V iL<br />
Z i(t)<br />
1<br />
0<br />
Abbildung 5.3: Übergang analoger auf digitale Signale<br />
• Analoge Signale werden mit A/D-Umsetzern in digitale Signale gewandelt<br />
Abbildung 5.4: A/D-Umsetzer<br />
V e<br />
• Digitale Signale werden mit D/A-Umsetzern in analoge Signale gewandelt<br />
Abbildung 5.5: D/A-Umsetzer<br />
X e<br />
A<br />
D<br />
• Zunehmende Bedeutung gemischter Schaltungen insbesondere im Bereich der Mikrosystemtechnik<br />
⇒ analoge Signalverarbeitung<br />
⇒ digitale Signalverarbeitung<br />
Prof. Dr.-Ing. R. Laur - 101 -<br />
ITEM<br />
D<br />
A<br />
X a<br />
V a<br />
t<br />
t
Kapitel 5 Analoge Schaltungstechnik Integrierte Schaltungen II<br />
5.1 Transistor - Grundschaltungen<br />
Anschlüsse: Emitter (E), Basis (B), Collector (C)<br />
6 grundsätzliche Zuordnungen der Anschlüsse zu den Signalklemmen => lediglich drei mit<br />
technischem Nutzen.<br />
v I<br />
i B<br />
i E<br />
i C<br />
Emitter-Grundschaltung<br />
v O<br />
v I<br />
i B iE<br />
i E<br />
v I v O<br />
i C<br />
Kollektor-Grundschaltung<br />
Abbildung 5.6: Grundschaltungen des Bipolar-Transistors<br />
i B<br />
i C<br />
Basis-Grundschaltung<br />
Da beim MOS-Transistor der Substrat- oder Bulkanschluß in der Regel nicht als Signalklemme<br />
genutzt wird, ergeben sich entsprechend:<br />
• Source-Grundschaltung<br />
• Gate-Grundschaltung<br />
• Drain-Grundschaltung<br />
5.2 Gleichstrom - Arbeitspunkt<br />
Der Transistor wird in einem definierten Arbeitspunkt betrieben. Kenngrößen in Emitterschaltung:<br />
VBE, VCE (eingeprägte Größen)<br />
IB, IC<br />
Diesen Gleichströmen bzw. -spannungen werden die zeitabhängigen Signalströme bzw. -<br />
spannungen überlagert:<br />
vBE(t), vCE(t),<br />
iB(t), iC(t).<br />
In integrierten Schaltungen steht zumeist nur eine Versorgungsquelle zur Verfügung. Diese<br />
muß zur Einstellung des Arbeitspunktes verwendet werden.<br />
Prof. Dr.-Ing. R. Laur - 102 -<br />
ITEM<br />
v O
Kapitel 5 Analoge Schaltungstechnik Integrierte Schaltungen II<br />
Einstellung des Basisstroms über Basiswiderstand<br />
R B<br />
VBE<br />
I B<br />
I C<br />
R C<br />
I E<br />
V CE<br />
V O<br />
V CC<br />
Abbildung 5.7: Einstellung des Gleichstromarbeitspunktes durch Basiswiderstand<br />
Vorwärts-Aktiver Bereich:<br />
R<br />
B<br />
IC ≈ β F ⋅IB R<br />
C<br />
VCC −VBEVCC−0.7V = ≈ (5.1)<br />
I I<br />
B B<br />
V −V V −V<br />
= ≈<br />
I β ⋅ IB<br />
CC CE CC CE<br />
C F<br />
Arbeitspunkteinstellung durch Basis-Spannungsteiler<br />
R 1<br />
V B<br />
R 2<br />
I Q<br />
I B<br />
Abbildung 5.8: Einstellung des Gleichstromarbeitspunktes mit Basis-Spannungsteiler<br />
V BE<br />
V CC<br />
IC = β ⋅IB ( β 1)<br />
R C<br />
I C<br />
I E<br />
R E<br />
V O<br />
V CE<br />
I = I + I = + ⋅I ≈ I<br />
E C B F B<br />
Prof. Dr.-Ing. R. Laur - 103 -<br />
ITEM<br />
C<br />
(5.2)<br />
(5.3)<br />
(5.4)
Kapitel 5 Analoge Schaltungstechnik Integrierte Schaltungen II<br />
VB = VBE + IE ⋅RE ≈ 0.7V<br />
+ IC ⋅RE V ≈V − I R + R<br />
CE CC C C E<br />
Belasteter Spannungsteiler: IQ = KIB mit K = 3...10<br />
VB<br />
R2<br />
=<br />
K⋅IB 07 . V + IC ⋅RE<br />
07 . V + I<br />
≈<br />
=<br />
K⋅I I<br />
B<br />
C<br />
β<br />
⋅R<br />
R<br />
1<br />
(<br />
VCC −VB<br />
=<br />
K I<br />
( + 1)<br />
5.3 Kleinsignalverhalten<br />
Signalgrößen
Kapitel 5 Analoge Schaltungstechnik Integrierte Schaltungen II<br />
Einfaches quasistationäres Ersatzschaltbild nach Ebers-Moll im vorwärts-aktiven Bereich<br />
v BE<br />
i B<br />
g BE<br />
gm v BE<br />
Abbildung 5.9: Einfaches quasistationäres Ersatzschaltbild des NPN-Transistors<br />
Die Kenngrößen des Kleinsignalersatzbildes lauten:<br />
∂IB<br />
gBE<br />
=<br />
∂V<br />
I B<br />
Ap ≈<br />
V<br />
Differentieller Eingangsleitwert<br />
g<br />
g<br />
m<br />
CE<br />
BE<br />
T<br />
∂IC<br />
IC<br />
= | AP ≈<br />
Transkonduktanz<br />
∂V<br />
V<br />
BE<br />
T<br />
∂IC<br />
I<br />
= Ap ≈<br />
∂V<br />
V<br />
CE<br />
C<br />
eaf<br />
i B<br />
gm⋅ vBE = gm⋅<br />
≈β ⋅i<br />
g<br />
BE<br />
F B<br />
g CE<br />
Differentieller Ausgangsleitwert<br />
Vorwärts-aktiver-Betrieb, vereinfachtes Ebers-Moll Ersatzschaltbild<br />
I B<br />
VBE βF⋅IB Abbildung 5.10: Vereinfachtes Ebers-Moll-Ersatzschaltbild im vorwärts-aktiven Betrieb<br />
V ⎛ BE ⎞<br />
⎛<br />
VT<br />
IB ≈ ( 1−αF) I ⎜<br />
ES⎜<br />
e −1<br />
⎟<br />
≈ ( 1−αF)<br />
I ⎜<br />
ES⎜<br />
e<br />
⎝ ⎠<br />
⎝<br />
αF<br />
IC = β ⋅ IB = ( 1 −αF) IES ⋅e<br />
1−<br />
α<br />
g<br />
BE<br />
F<br />
V<br />
V<br />
1 ∂IB<br />
1<br />
⎛<br />
= ≈ ≈ ⋅( 1−α<br />
F) ⋅IES ⋅⎜e<br />
rBE<br />
∂VBE<br />
V<br />
⎜<br />
T<br />
⎝<br />
BE<br />
T<br />
V<br />
V<br />
BE<br />
T<br />
⎞<br />
⎟<br />
⎠<br />
⎞<br />
⎟<br />
I<br />
⎟<br />
⎠ V<br />
=<br />
VBE<br />
V B<br />
Berücksichtigung des endlichen Ausgangsleitwertes: ⇒ Early-Effekt<br />
Prof. Dr.-Ing. R. Laur - 105 -<br />
ITEM<br />
T<br />
T<br />
I C<br />
i C<br />
V CE<br />
v CE
Kapitel 5 Analoge Schaltungstechnik Integrierte Schaltungen II<br />
-Veaf<br />
Abbildung 5.11: Early-Effekt<br />
Unter Berücksichtigung des Early-Effektes ergibt sich:<br />
⎛ V<br />
IC = I'C⋅ ( 1+ ⋅ VCE) = I'C⋅<br />
⎜<br />
⎜1+<br />
⎝ V<br />
λ<br />
CE<br />
eaf<br />
⎞<br />
⎟<br />
⎠<br />
IC'<br />
IC<br />
dIC<br />
I<br />
⇒ gCE<br />
= ≈<br />
dV V<br />
Vollständiges π-Ersatzschalbild für höhere Frequenzen<br />
Für höhere Frequenzen ergibt sich nachfolgendes Ersatzschaltbild:<br />
v BE<br />
r B<br />
B B' C'<br />
C<br />
g BE<br />
v' BE<br />
C BE<br />
C BC<br />
r BC<br />
CE<br />
g mv' BE<br />
Abbildung 5.12: Vollständiges π-Ersatzschaltbild für höhere Frequenzen<br />
CBC: Sperrschichtkapazität<br />
CBE: Sperrschicht- und Diffusionskapazität<br />
rB, rC: Bahnwiderstände<br />
rBC: Rückwirkungswiderstand<br />
Vereinfachtes π-Ersatzschalbild für mittlere Frequenzen<br />
v BE<br />
i B<br />
C BC<br />
C<br />
eaf<br />
g CE<br />
r C<br />
VCE<br />
g C g BE BE<br />
mvBE gCE<br />
Abbildung 5.13: Vereinfachtes π-Ersatzschaltbild für mittlere Frequenzen<br />
Prof. Dr.-Ing. R. Laur - 106 -<br />
ITEM<br />
i C<br />
i C<br />
v CE<br />
v CE
Kapitel 5 Analoge Schaltungstechnik Integrierte Schaltungen II<br />
Frequenzgang der Kleinsignal-Stromverstärkung<br />
βF<br />
0<br />
Näherung: Tiefpaßverhalten mit β F =<br />
ω<br />
1+<br />
j<br />
mit 3dB Grenzfrequenz mit<br />
ωβ : ( ω )<br />
ω β<br />
!<br />
β F β =<br />
Bei ausgangsseitigem Kurzschluß ergibt sich<br />
mit:<br />
i ≈ g ⋅v − jω C ⋅v ≈ g ⋅v<br />
C m BE BC BE m BE<br />
( ( ) )<br />
iB ≈ gBE + jωCBE + CBC vBE<br />
β<br />
F<br />
iC<br />
gm<br />
= ≈<br />
i g + jωC + C<br />
B<br />
( )<br />
BE BE BC<br />
βF<br />
0 βF<br />
0<br />
=<br />
=<br />
ω<br />
ω<br />
1+ j<br />
1+<br />
j<br />
⎛ g<br />
ω BE ⎞<br />
β<br />
⎜ ⎟<br />
⎝ C + C ⎠<br />
g<br />
BE BC<br />
BE<br />
ω β ≈ ; βF 0<br />
CBE<br />
+ CBC<br />
=<br />
Definition: Transitfrequenz<br />
g<br />
g<br />
m<br />
BE<br />
β<br />
F 0<br />
2<br />
gm<br />
gBE<br />
=<br />
⎛ C + C<br />
1+<br />
jω⎜<br />
⎝ g<br />
BE BC<br />
Die Frequenz, bei der die Kleinsignal-Stromverstärkung auf 1 absinkt, wird als Transitfrequenz<br />
bezeichnet.<br />
( )<br />
!<br />
βF ωT = 1 , wobei gBE
Kapitel 5 Analoge Schaltungstechnik Integrierte Schaltungen II<br />
( )<br />
β ω<br />
F T<br />
!<br />
= 1 ≈<br />
ω<br />
g<br />
m<br />
( C + C )<br />
T BE BC<br />
g BE<br />
ωT ≈ β F 0 ⋅ = β F 0 ⋅ω<br />
C + C<br />
BE<br />
BC<br />
β<br />
Verstärkungs-Bandbreiteprodukt<br />
Da die Kapazitäten von Transistorflächen abhängig sind, lassen sich hohe Bandbreiten nur<br />
mit möglichst kleinen Transistorflächen erzielen.<br />
log f T<br />
Abbildung 5.15: Stromabhängigkeit der Transitfrequenz<br />
⇒ Optimale Bandbreite für maximales fT<br />
log I C<br />
Grund für verringertes fT bei niedrigen und hohen Strömen: Abfall von β (siehe Gummel-<br />
Poon-Modell<br />
5.3.2 Kleinsignalersatzschaltbild des MOSFET in Sättigung<br />
Die Kenngrößen des Kleinsignalersatzbildes des MOS-Transistors in Sättigung lauten:<br />
β<br />
2<br />
ID ≈ ⋅( VGS −VTS<br />
)<br />
Drainstrom in Sättigung<br />
2<br />
(<br />
VTS = VT0+ γ VSB+<br />
2ΦF− 2Φ<br />
F ) Schwellenspannung mit Substratsteuereffekt<br />
Der Eingangsleitwert kann bei der Kleinsignalbetrachtung aufgrund der Isolation des Gates<br />
vernachlässigt werden.<br />
g<br />
g<br />
m<br />
DS<br />
∂ID<br />
2I<br />
D<br />
= ≈β( VGS −VTS ) ≈ ≈ 2 ⋅β⋅IDTranskonduktanz ∂V<br />
V −V<br />
GS<br />
I<br />
=<br />
V<br />
∂<br />
∂<br />
D<br />
DS<br />
GS TS<br />
Differentieller Ausgangsleitwert<br />
Betrachtung der Kanallängenverkürzung:<br />
⎛ V<br />
ID = ID′ ( 1+ λVDS) = ID'<br />
⋅ ⎜<br />
⎜1+<br />
⎝ V<br />
=> g<br />
DS<br />
∂I<br />
D I<br />
= ≈ λ I D =<br />
∂V<br />
V<br />
DS<br />
D<br />
eaf<br />
DS<br />
eaf<br />
⎞<br />
⎟<br />
⎠<br />
Prof. Dr.-Ing. R. Laur - 108 -<br />
ITEM
Kapitel 5 Analoge Schaltungstechnik Integrierte Schaltungen II<br />
Substratsteuereffekt:<br />
g<br />
mb<br />
∂I<br />
=<br />
∂V<br />
= β<br />
= β<br />
= g<br />
= g<br />
( V −V<br />
)<br />
( V −V<br />
)<br />
m<br />
m<br />
D<br />
BS<br />
⋅<br />
GS<br />
GS<br />
⋅ χ<br />
TS<br />
TS<br />
γ<br />
⎛ ∂V<br />
⎜<br />
⎜−<br />
⎝ ∂V<br />
∂VTS<br />
∂V<br />
SB<br />
+ 2Φ<br />
TS<br />
BS<br />
⎞<br />
⎟<br />
⎠<br />
, mit χ =<br />
2<br />
2 VSB<br />
F<br />
VSB<br />
γ<br />
+ 2Φ<br />
Das Substrat steuert ebenso wie das Gate den Kanalstrom. Dieser Effekt wird Back-Gate-<br />
Effekt genannt. Der Steuer-Leitwert gmb ist um den Faktor χ kleiner als gm.<br />
g = χ ⋅g<br />
mb m<br />
typische Werte: γ ≈03 . V, Φ ≈13<br />
. V<br />
Tabelle 5.1: Back-Gate-Effekt<br />
2 F<br />
VSB 0V 3V 5V<br />
χ 0.13 0.07 0.06<br />
Das vollständige Kleinsignalersatzschaltbild des MOSFET in Sättgung ergibt sich daher zu:<br />
G<br />
S<br />
v GS<br />
i G<br />
C SB<br />
C GS<br />
C GD<br />
B<br />
C DB<br />
g mv GS<br />
F<br />
g mbv BS<br />
Abbildung 5.16: Kleinsignalersatzbild des MOSFET in Sättigung<br />
Prof. Dr.-Ing. R. Laur - 109 -<br />
ITEM<br />
g DS<br />
i D<br />
D<br />
v DS
Kapitel 5 Analoge Schaltungstechnik Integrierte Schaltungen II<br />
Grenzfrequenz des MOS-Transistors<br />
Unter Vernachlässigung von gmb, CDB, CSB, gDS ergibt sich:<br />
ω T<br />
ω<br />
T<br />
gm<br />
≈<br />
C + C<br />
GS GD<br />
=<br />
g<br />
C<br />
m<br />
OX<br />
W<br />
mit gm = β ⋅( VGS −VTS)<br />
und β = ⋅µ ⋅ COX ′ und COX = W⋅L⋅ COX<br />
′ ist<br />
L<br />
µ C<br />
W<br />
⋅ ′ ⋅ −<br />
=<br />
L<br />
C′ ⋅W⋅L ( V −V<br />
)<br />
( V V )<br />
OX GS TS<br />
OX<br />
µ GS TS 1<br />
= 2 ~ 2<br />
L L<br />
Optimale Grenzfrequenz für kurze Transistoren.<br />
5.4 Einfache bipolare Kleinsignal - Verstärkerschaltungen<br />
5.4.1 Emitter - Grundschaltung<br />
Beispiel: - Einstellung des Basisstroms über Basiswiderstand RB<br />
- Kapazitive Ein- /Auskopplung der Signale über Ci, Co<br />
C i<br />
Abbildung 5.17: Emitter-Grundschaltung<br />
vi<br />
R B<br />
VCC<br />
Kapazitive Kopplung ist nur in diskreter Schaltungstechnik wegen flächenaufwendiger<br />
Kapazitäten möglich. Direkte Kopplung der Stufen in integrierter Schaltungstechnik.<br />
Prof. Dr.-Ing. R. Laur - 110 -<br />
ITEM<br />
R C<br />
CO<br />
vo
Kapitel 5 Analoge Schaltungstechnik Integrierte Schaltungen II<br />
V BE'+v i<br />
V CC<br />
R C<br />
V CE'+v o<br />
Abbildung 5.18: Symbolische Darstellung der Arbeitspunkteinstellung über die Basis-<br />
Emitter-Spannung<br />
v gBE vBE gmvBE rCE i RC vo Abbildung 5.19: Kleinsignal-Ersatzschaltung der Emitterschaltung für niedrige Frequenzen<br />
Für niedrige Frequenzen gilt:<br />
( ) ( )<br />
vo =−gm⋅vBE ⋅ RC|| rCE =−gm RC|| rCE<br />
⋅vi<br />
vo<br />
AV<br />
= = − gm( RC|| rCE)<br />
v<br />
i<br />
In der Regel gilt rCE >> RC. Daraus resultiert die Kleinsignal-Spannungsverstärkung<br />
IC<br />
AV ≈ −g<br />
m ⋅ RC<br />
≈ − ⋅ RC<br />
v<br />
Abschätzung:<br />
V<br />
CE<br />
V<br />
≈<br />
2<br />
CC<br />
T<br />
, I<br />
C<br />
VCC<br />
≈<br />
2⋅<br />
R<br />
C<br />
, A<br />
V<br />
V<br />
≈ −<br />
2v<br />
Für VCC = 5V ⇒ AV ≈ -100 (das negative Vorzeichen bedeutet eine Phasendrehung um 180°)<br />
Eingangswiderstand: r<br />
i<br />
=<br />
g<br />
1 => einige kΩ<br />
Ausgangswiderstand: ro = RC|| rCE ≈ RC<br />
=> einige kΩ<br />
BE<br />
CC<br />
Prof. Dr.-Ing. R. Laur - 111 -<br />
ITEM<br />
T
Kapitel 5 Analoge Schaltungstechnik Integrierte Schaltungen II<br />
v i<br />
r i<br />
Abbildung 5.20: Ersatzschaltung der Verstärkerstufe als spannungsgesteuerte Spannungsquelle<br />
Frequenzverhalten, Miller-Kapazität<br />
v i<br />
gBE<br />
iCBC<br />
CBE<br />
CBC<br />
A Vv i<br />
r o<br />
AVv i<br />
Abbildung 5.21: Kleinsignal-Ersatzschaltbild für mittlere Frequenzen<br />
|AV| >> 1; AV < 0<br />
( | | v )<br />
i = jω⋅C ⋅ v + A ⋅<br />
≈ jω⋅C ⋅| A | ⋅v<br />
CBC BC i V i<br />
Miller-Kapazität<br />
CM = AV ⋅CBC BC V i<br />
CBC belastet den Eingang mit CM gang geliefert werden muß.<br />
= AV ⋅CBC zusätzlich zu CBE, da dieser Strom vom Ein-<br />
Miller-Effekt (bewirkt eine Reduzierung der Grenzfrequenz)<br />
v i<br />
r i<br />
C BE+C M<br />
A Vv i<br />
Abbildung 5.22: Kleinsignal-Ersatzschaltbild mit Miller-Kapazität<br />
Prof. Dr.-Ing. R. Laur - 112 -<br />
ITEM<br />
r o<br />
r o<br />
v o<br />
v o<br />
v o
Kapitel 5 Analoge Schaltungstechnik Integrierte Schaltungen II<br />
5.4.2 Kollektor - Grundschaltung, Emitterfolger<br />
V B'+v i<br />
V BE<br />
V CC<br />
Abbildung 5.23: Kollektor-Grundschaltung, Emitterfolger<br />
R E<br />
V E'+v o<br />
Qualitative Überlegung:<br />
Bei leitendem Basis-Emitter-Übergang ist die Spannung V BE ≈ 07 . ... 08 . V näherungsweise<br />
konstant.<br />
Daraus folgt:<br />
v ≈ v , A ≈1<br />
o i V<br />
Ausgangssignal am Emitter "folgt" dem Eingangssignal an der Basis. Die Kollektor-<br />
Schaltung wird daher auch als Emitterfolger bezeichnet.<br />
v i<br />
i B<br />
g BE<br />
v BE<br />
R E<br />
g mv BE<br />
Abbildung 5.24: Kleinsignal-Ersatzschaltbild des Emitterfolgers<br />
v<br />
BE<br />
i<br />
=<br />
g<br />
B<br />
BE<br />
iB<br />
gm⋅ vBE = βF ⋅gBE ⋅ = β ⋅i<br />
g<br />
BE<br />
( β 1)<br />
( || )<br />
( β 1)<br />
( ) (<br />
F B<br />
vo = F + iB RE rCE<br />
= + ⋅ v −v g ⋅ R || r )<br />
F i o BE E<br />
CE<br />
Prof. Dr.-Ing. R. Laur - 113 -<br />
ITEM<br />
r CE<br />
v o
Kapitel 5 Analoge Schaltungstechnik Integrierte Schaltungen II<br />
A<br />
V<br />
( βF<br />
+ 1)<br />
gBE( RE|| rCE)<br />
( β ) g ( R r )<br />
vo<br />
= =<br />
v 1+ + 1 ⋅ ⋅<br />
i<br />
|| E<br />
F BE E C<br />
In der Regel gilt: rCE >> RE, βF >> 1<br />
A<br />
V<br />
1<br />
≈<br />
1<br />
1+<br />
β ⋅R ⋅g<br />
F E BE<br />
Beispiel: IC = 1mA, RE = 0.5kΩ, βF = 100<br />
g<br />
BE<br />
IC<br />
≈<br />
β ⋅V<br />
F T<br />
AV ≈095 . ≈1<br />
≈ 04 . mS<br />
In der Regel gilt: AV ≈ 1, AV < 1 ⇒ Ein- und Ausgangssignal des Emitterfolgers liegen in<br />
Phase<br />
Eingangswiderstand:<br />
( ) ( )<br />
iB = vi −vo ⋅ gBE = vi − AV ⋅vi ⋅gBE mit rCE >> RE ergibt sich:<br />
1<br />
iB ≈ vi⋅gBE −<br />
1<br />
1+<br />
β ⋅g ⋅R<br />
r<br />
i<br />
F BE E<br />
⎡ ⎛ 1<br />
≈ ⎢1−⎜1−<br />
⎣ ⎝ β ⋅g ⋅R<br />
vi<br />
=<br />
β ⋅ R<br />
F E<br />
F BE E<br />
⋅v ⋅g<br />
⎞⎤<br />
⎟⎥<br />
⋅v ⋅g<br />
⎠⎦<br />
i BE<br />
i BE<br />
vi<br />
= ≈ βF ⋅RE<br />
=> extrem hoher Eingangswiderstand<br />
i<br />
B<br />
Beispiel: βF = 100, RE = 0.5kΩ<br />
=> ri ≈ 50kΩ<br />
; 1<br />
≈1− x, wenn x
Kapitel 5 Analoge Schaltungstechnik Integrierte Schaltungen II<br />
Ausgangswiderstand<br />
Signalquelle mit Innenwiderstand RS am Eingang.<br />
R S<br />
i B<br />
r BE<br />
R E<br />
ßF i B<br />
Abbildung 5.25: Bestimmung des Ausgangswiderstands des Emitterfolgers<br />
i<br />
B<br />
vo<br />
=−<br />
RS + rbe<br />
( β 1)<br />
v<br />
v<br />
o F + ⋅ o vo<br />
io =− ( βF<br />
+ 1)<br />
⋅ iB<br />
+ =<br />
+<br />
R || r R + r R || r<br />
( + )<br />
E CE<br />
i β o F 1 1<br />
= + = g<br />
v R + r R || r<br />
r<br />
o<br />
o<br />
S BE E CE<br />
vo<br />
1 R + r<br />
= = =<br />
i g β + 1<br />
mit rCE >> RE, βF >> 1:<br />
r<br />
o<br />
o<br />
R + r<br />
≈<br />
β<br />
0<br />
S BE<br />
F<br />
|| R<br />
E<br />
S BE<br />
F<br />
0<br />
( R r )<br />
|| ||<br />
E CE<br />
S BE<br />
E CE<br />
Unter der Voraussetzung einer niederohmigen Signalquelle (RS
Kapitel 5 Analoge Schaltungstechnik Integrierte Schaltungen II<br />
Stromverstärkung<br />
Zur Bestimmung der Stromverstärkung wird das Kleinsignal-Ersatzschaltbild bei ausgangsseitigem<br />
Kurzschluß betrachtet.<br />
i i<br />
gBE<br />
RE<br />
βF ⋅iB<br />
Abbildung 5.26: Kleinsignal-Ersatzschaltbild zur Bestimmung der Stromverstärkung<br />
( β 1 )<br />
i =− + ⋅i<br />
o F<br />
A<br />
I<br />
i<br />
io<br />
= = − ( βF + 1) ≈ −β<br />
F => hohe Stromverstärkung<br />
i<br />
i<br />
5.4.3 Basis - Grundschaltung<br />
E<br />
VEB'+v i<br />
Abbildung 5.27: Basis-Grundschaltung<br />
=> mittlere Leistungsverstärkung<br />
Kleinsignalrechnung mit entsprechenden Abschätzungen ergibt:<br />
AV ≈ gm⋅RC 1<br />
ri<br />
≈<br />
gm<br />
r ≈ R<br />
o C<br />
Eigenschaften der Basis-Schaltung:<br />
Hohe Spannungsverstärkung (100 . . . 200)<br />
Hoher Ausgangswiderstand ( . . . KΩ)<br />
B<br />
V CC<br />
R C<br />
C<br />
i o<br />
rCE<br />
VCB'+v o<br />
Prof. Dr.-Ing. R. Laur - 116 -<br />
ITEM
Kapitel 5 Analoge Schaltungstechnik Integrierte Schaltungen II<br />
Sehr niedriger Eingangswiderstand ( . . . Ω)<br />
Die Basisschaltung ist wegen ihrer hohen Bandbreite besonders für Hochfrequenzanforderungen<br />
geeignet.<br />
Höhere Verstärkungen lassen sich durch mehrstufige Verstärkerschaltungen erzielen. Da in<br />
intergrierten Schaltungen keine kapazitiven Kopplungen zwischen den einzelnen<br />
Verstärkerstufen möglich sind, ergibt sich das Problem der Einstellung des Arbeitspunktes.<br />
5.4.4 Kaskadenschaltung<br />
Die Kaskadenschaltung besteht aus jeweils einem npn- und einem pnp-Verstärker in Emitterschaltung.<br />
Das Ausgangssignal des npn-Verstärkers dient als Eingangssignal des pnp-<br />
Verstärkers.<br />
Abbildung 5.28: Kaskadenschaltung<br />
T1<br />
RC1<br />
VCC<br />
VBE1'+vi RC2 VC2'+vo Für die Spannungsverstärkung der Kaskadenschaltung ergibt sich unter der Bedingung, daß:<br />
r >> R<br />
BE2 C1<br />
A = g ⋅R ⋅g ⋅R<br />
V m1 C1 m2<br />
C2<br />
Ein- und Ausgangssignal der Kaskadenschaltung befinden sich in Phase.<br />
5.4.5 Darlington - Schaltung<br />
V B1'+v i<br />
Abbildung 5.29: NPN-Darlington-Stufe<br />
I B'<br />
T 1<br />
I C1<br />
I E1=I B2<br />
T 2<br />
V CC<br />
R C<br />
I C'<br />
I C2<br />
I E'<br />
T 2<br />
V CE2'+v o<br />
Prof. Dr.-Ing. R. Laur - 117 -<br />
ITEM
Kapitel 5 Analoge Schaltungstechnik Integrierte Schaltungen II<br />
Beide Transistoren können zusammen als ein Transistor aufgefaßt werden, der als Darlington-Transistor<br />
bezeichnet wird.<br />
B'<br />
I B'=I B1<br />
Abbildung 5.30: Darlington-Transistor<br />
I C1<br />
I E1=I B2<br />
Großsignalverhalten der Darlington-Schaltung<br />
VB'E' = VBE1+ VBE2<br />
≈14V<br />
. ⇒ ≈2⋅VBE von einstufigen Verstärkern<br />
I ≈ β ⋅ I′<br />
C1 1 B<br />
( ) IB IB β<br />
( )<br />
( 1)<br />
I = I ≈ + ⋅ ′<br />
B2 E1<br />
1 1<br />
I ≈ β ⋅I ≈ β ⋅ β + ⋅ ′<br />
C2 2 B2<br />
2 1 1<br />
[ ]<br />
I′ = I + I ≈ β + β β + ⋅ I′ ≈β ⋅β ⋅ I′<br />
mit β ≈ 100<br />
C C1 C2 1 2 1 B 1 2<br />
IC B<br />
′ ≈ β ′ ⋅ I′<br />
, mit β′ ≈ β1⋅β2 Der Darlington-Transistor entspricht einem Transistor mit hoher Stromverstärkung<br />
Kleinsignalverhalten<br />
ic'≈ β ′ ⋅iB'<br />
1 IC<br />
' I B'<br />
gBE<br />
'≈<br />
⋅ =<br />
2⋅ β ′ V 2⋅V<br />
g<br />
m<br />
IC<br />
'<br />
'≈<br />
2⋅V<br />
T<br />
T<br />
T<br />
B<br />
C'<br />
I C'<br />
I C2<br />
I E'<br />
E'<br />
β1⋅β2 gCE '≈ ⋅gCE<br />
3<br />
2<br />
2<br />
Die Spannungsverstärkung der Darlington-Schaltung entspricht der Emitter-Grundschaltung:<br />
A ≈−g ' ⋅<br />
V m<br />
R C<br />
Prof. Dr.-Ing. R. Laur - 118 -<br />
ITEM
Kapitel 5 Analoge Schaltungstechnik Integrierte Schaltungen II<br />
5.4.6 PNP - Darlington - Transistor<br />
In bipolaren Schaltungen sind PNP-Transistoren lediglich als laterale Transistoren mit niedriger<br />
Stromverstärkung zu realisieren. Die nachfolgende Darlington-Schaltung verhält sich wie<br />
ein PNP-Transistor mit hoher Stromverstärkung<br />
Abbildung 5.31: PNP-Darlington-Transistor<br />
I = I ≈ β ⋅ I′<br />
CP BN P B<br />
C′ ≈ βN ⋅ BN ≈βN ⋅ β PIB′<br />
I I<br />
I B<br />
B'<br />
IC′ = β' ⋅ ′ mit β'≈ β ⋅β<br />
N P<br />
IB'<br />
IEP<br />
ICP=IBN<br />
5.5 Einfache Kleinsignal - Verstärkerschaltungen in MOS - Technik<br />
Prinzipiell ergeben sich in der MOS-Technik wie bei den bipolaren Transistoren 3<br />
Grundschaltungen mit entsprechenden Schaltungen.<br />
5.5.1 Source - Grundschaltung<br />
Die Funktionsweise der Source-Schaltung entspricht der der Emitterschaltung in Bipolar-<br />
Technologie.<br />
V GS'+v i<br />
Abbildung 5.32: Source-Grundschaltung<br />
V B'<br />
V CC<br />
R D<br />
E'<br />
IE'<br />
ICN<br />
I C'<br />
C'<br />
V D'+v o<br />
Prof. Dr.-Ing. R. Laur - 119 -<br />
ITEM
Kapitel 5 Analoge Schaltungstechnik Integrierte Schaltungen II<br />
v i<br />
vGS gmVGS rDS RD Abbildung 5.33: Kleinsignal-Ersatzschaltung der Source-Schaltung<br />
( )<br />
AV =−gm⋅RD|| rDS ≈−gm⋅RD mit ri →∞ ergibt sich der Ausgangswiderstand zu<br />
r = r || R ≈ R<br />
o DS D<br />
D<br />
Beim Vergleich mit der bipolaren Schaltung zeigt sich, daß die Verstärkung erheblich geringer<br />
ist.<br />
IC<br />
Bipolar: gm<br />
≈<br />
V<br />
MOS: g ≈ 2⋅β ⋅I<br />
T<br />
m D<br />
Beispiel: ID = IC = 1mA<br />
W<br />
= 1; L<br />
A<br />
′ = 90 2; V<br />
A<br />
= ⋅ ′ = 90 2<br />
V<br />
W µ<br />
β<br />
µ<br />
β β<br />
L<br />
1mA<br />
gmBip<br />
( ) ≈ ≈400<br />
mS<br />
26mV<br />
µ A<br />
gm(<br />
MOS)<br />
≈ 290 ⋅ 2 ⋅1mA ≈04<br />
. mS<br />
V<br />
Für hohe Verstärkungen sind hohe Widerstandswerte für den Drain-Widerstand erforderlich.<br />
Diese lassen sich jedoch nicht oder nur mit erheblichem Platzaufwand realisieren. Der Drain-<br />
Widerstand wird in der integrierten Schaltungstechnik durch aktive Lastschaltungen ersetzt.<br />
5.5.2 Source - Schaltung mit Enhancement - Last<br />
VGS = VDS<br />
VCC<br />
ID<br />
VB VDS<br />
ID<br />
VTS<br />
a) b)<br />
Abbildung 5.34: a) Enhancement Lasttransistor, b) Übergangskennlinie<br />
Prof. Dr.-Ing. R. Laur - 120 -<br />
ITEM<br />
VDS<br />
v o
Kapitel 5 Analoge Schaltungstechnik Integrierte Schaltungen II<br />
VDS = VGS < VTS : ID=<br />
0<br />
V ≥V −V : I<br />
β<br />
≈ V<br />
2<br />
−V<br />
( )<br />
DS GS TS D DS TS<br />
v i+V GS1'<br />
2<br />
Transistor in Sättigung<br />
T 2<br />
T 1<br />
V CC<br />
Abbildung 5.35: Source-Schaltung mit Enhancement-Last<br />
Übertragungscharakteristik, Großsignalverhalten<br />
V 0<br />
VCC<br />
VCC-VT2<br />
I II III<br />
VT1<br />
v o+V DS1'<br />
Abbildung 5.36: Übertragungscharakteristik der Source-Schaltung mit Enhancement-Last<br />
Die Übertragungscharakteristik Vo=VDS1 = f(Vi=VGS1) läßt sich in drei Arbeitsbereiche unterteilen.<br />
I: T2 gesättigt, T1 ist gesperrt, da Vi < VT1<br />
T2 liefert lediglich geringen Sperrstrom<br />
VDS2 = VT2 : Vo = VCC - VT2<br />
II: T2 gesättigt, T1 ist leitfähig und in Sättigung, da Vi > VT1 und Vo > Vi - VT1<br />
näherungsweise lineare Übertragungscharakteristik<br />
Prof. Dr.-Ing. R. Laur - 121 -<br />
ITEM<br />
Vi
Kapitel 5 Analoge Schaltungstechnik Integrierte Schaltungen II<br />
III: T2 gesättigt, T1 im Triodenbereich, da Vi > VT1 und Vo < Vi - VT1<br />
Mit den vereinfachenden Voraussetzungen r DS ≈ oo und γ ≈ 0 (kein Substratsteuereffekt)<br />
kann folgendes Kleinsignalersatzschaltbild angenommen werden:<br />
VGS2<br />
gm2 v GS2<br />
vGS1 = vi vo<br />
gm1 v i<br />
Abbildung 5.37: Kleinsignalersatzschaltbild der Source-Schaltung mit Enhancement-Last in<br />
Bereich II<br />
vgs2 vo<br />
=−<br />
− g ⋅ v = g ⋅v<br />
A<br />
V<br />
m2 o m1<br />
i<br />
v<br />
=<br />
v<br />
o<br />
i<br />
g<br />
= −<br />
g<br />
m1<br />
m2<br />
= −<br />
2β1I<br />
2β<br />
I<br />
2<br />
D<br />
D<br />
= −<br />
( W ) L 1<br />
( W ) 2<br />
L<br />
Daraus resultiert die Forderung, daß T1 möglichst kurz und weit und T2 möglichst lang und<br />
schmal sein sollen, um eine hohe Spannungsverstärkung zu erhalten.<br />
Beispiel: ( )<br />
W L 1<br />
= 30 , ( W<br />
L) 2<br />
1<br />
= => AV = 30<br />
30<br />
5.5.3 Source-Schaltung mit Depletion-Last<br />
G<br />
D<br />
S<br />
ID<br />
VT = VDSAT<br />
a) b)<br />
Abbildung 5.38: a) Depletion-Lasttransistor, b) Übergangskennlinie<br />
Prof. Dr.-Ing. R. Laur - 122 -<br />
ITEM<br />
VDS
Kapitel 5 Analoge Schaltungstechnik Integrierte Schaltungen II<br />
v i+V GS1'<br />
Abbildung 5.39: Source-Schaltung mit Depletion-Last<br />
Übertragungscharakteristik, Großsignalverhalten<br />
VO VCC T2<br />
T1<br />
VCC<br />
I II III IV<br />
vo+VDS1'<br />
Abbildung 5.40: Übertragungscharakteristik der Source-Schaltung mit Depletion-Last<br />
I: Vi < VT1<br />
T1 gesperrt, ID = 0, kein Spannungsabfall über T2,<br />
⇒ Vo ≈ VCC<br />
II: Vi > VT1, Vo > VCC - |VT2|<br />
T1 ist leitfähig und in Sättigung, T2 ist leitfähig und im Triodengebiet<br />
⇒ Übertragungscharakteristik stark nichtlinear<br />
III: Vo < (VCC -|VT2|), Vo > (Vi - VT1) beide Transistoren leitfähig und in Sättigung<br />
⇒ lineare Übertragungscharakteristik (Verstärkerbereich)<br />
IV: Vo < (Vi - VT1)<br />
beide Transistoren leitfähig, T2 in Sättigung, T1 in Triodenbereich<br />
Prof. Dr.-Ing. R. Laur - 123 -<br />
ITEM<br />
V i
Kapitel 5 Analoge Schaltungstechnik Integrierte Schaltungen II<br />
v gs1 = v i<br />
g DS2<br />
Abbildung 5.41: Kleinsignal-Ersatzschaltbild der Source-Schaltung mit Depletion-Last in<br />
Bereich III<br />
g m1 v i<br />
Bestimmung der Kleinsignal-Spannungsverstärkung in Bereich III:<br />
v gs2<br />
v<br />
o<br />
A<br />
V<br />
= 0<br />
gm1<br />
=−<br />
g + g<br />
DS1 DS 2<br />
⋅ v<br />
vo<br />
gm1<br />
= = −<br />
v g + g<br />
i<br />
DS1 DS 2<br />
i<br />
W µ A<br />
′<br />
L<br />
2 D λ<br />
1<br />
V<br />
−1<br />
Beispiel: ( ) = 20,<br />
β = 90 , I = 1mA,<br />
= 0,<br />
01V<br />
5.5.4 Source - Schaltung mit Stromquellen - Last<br />
V GSP'<br />
Abbildung 5.42: PMOS-Stromquelle<br />
VCC<br />
I q<br />
MP<br />
g DS1<br />
⇒ AV<br />
VDSP<br />
≈ −95<br />
An das Gate des PMOS-Transistors wird die Spannung V GSP ′ = const angelegt; für<br />
VGSP ′ < VTP<<br />
0 ist MP<br />
leitfähig und für VDSP < V GSP ′ −VTP ist Mp<br />
gesättigt.<br />
Prof. Dr.-Ing. R. Laur - 124 -<br />
ITEM<br />
v o
Kapitel 5 Analoge Schaltungstechnik Integrierte Schaltungen II<br />
IQ<br />
I'<br />
Iq *<br />
|VGSP-VTP ' |<br />
Abbildung 5.43: Ausgangskennlinienfeld der PMOS-Stromquelle<br />
*<br />
Im Arbeitspunkt Q verhält sich der PMOS-Transistor wie eine ideale Stromquelle Iq mit parallelem<br />
Leitwert g . DSP<br />
VCC<br />
Iq<br />
gDSP<br />
Abbildung 5.44: Ersatzschaltbild der PMOS-Stromquelle<br />
I q *<br />
CMOS-Verstärker mit Stromquellen-Last<br />
Kein Backgate Einfluß, da VSBN und VSBP vom Signal unbeeinflußt sind.<br />
V' GS2<br />
V' GS1+v i<br />
Abbildung 5.45: CMOS-Verstärker mit Stromquellen-Last<br />
VCC<br />
T2<br />
T 1<br />
Q<br />
V'DS1+vo<br />
Prof. Dr.-Ing. R. Laur - 125 -<br />
ITEM<br />
|VDSP|
Kapitel 5 Analoge Schaltungstechnik Integrierte Schaltungen II<br />
V0<br />
V CC<br />
VCC-|VT2 |<br />
I II III IV<br />
VT1<br />
Verstärkerbereich<br />
Abbildung 5.46: Übertragungscharakteristik des CMOS-Verstärkers mit Stromquellen-Last<br />
I: Vi < VT1 ⇒ T1 ist gesperrt<br />
Vo > (VCC - |VT2|) ⇒ T2 ist leitfähig und im Triodenbereich<br />
Vo ≈ VCC<br />
II: Vi > VT1, Vo > (VCC - |VT2|) ⇒ T1 ist leitfähig und in Sättigung<br />
T2 ist leitfähig und im Triodenbereich<br />
⇒ stark nichtlineare Charakteristik<br />
IIII: Vo < (VCC -|VT2|), Vo > (Vi - VT1) ⇒ beide Transistoren sind leitfähig und in Sättigung<br />
⇒ Verstärkerbereich<br />
IV: Vo < (VCC -|VT2|), Vo > (Vi - VT1) ⇒ beide Transistoren leitfähig, T2 ist in Sättigung, T1 im<br />
Trodenbereich<br />
gDS2<br />
vi<br />
gm1 v gDS1<br />
vo<br />
i<br />
Abbildung 5.47: Kleinsignal-Ersatzschaltbild in Bereich III (beide Transistoren in Sättigung)<br />
Kleinsignal-Ersatzschaltbild im Bereich III<br />
vo<br />
=−<br />
g<br />
gm1⋅vi + g<br />
A<br />
Wegen:<br />
V<br />
DS1 DS 2<br />
gm1<br />
=−<br />
g + g<br />
DS1 DS 2<br />
Prof. Dr.-Ing. R. Laur - 126 -<br />
ITEM<br />
Vi
Kapitel 5 Analoge Schaltungstechnik Integrierte Schaltungen II<br />
g<br />
m<br />
2I<br />
D<br />
≈<br />
V −V<br />
GS T<br />
gDS ≈λ ⋅ID<br />
AV<br />
≈−<br />
V<br />
2⋅ I D<br />
−V ⋅λ⋅I ~ −<br />
1<br />
I<br />
⇒ AV<br />
~<br />
1<br />
I<br />
( )<br />
GS T D D<br />
Spannungsrückwirkung für einen typischen CMOS-Verstärker<br />
log|A V |<br />
10 3<br />
10 2<br />
10 -7<br />
D<br />
Sub-Threshold-Bereich<br />
10 -5 10 -3<br />
log(I D/A)<br />
Abbildung 5.48: Spannungsrückwirkung eines typischen CMOS-Verstärkers<br />
5.5.5 Source - Folger<br />
Die Funktionsweise des Sourcefolgers entspricht der des Emitterfolgers in Bipolar-<br />
Technologie.<br />
Beispiel: Source-Folger mit Stromquelle als Last<br />
V G'+v i<br />
V CC<br />
Abbildung 5.49: Source-Folger mit Stromquellen-Last<br />
I0'<br />
gQ<br />
VS'+vo<br />
Bei dieser Betrachtung wird der Back-Gate-Einfluß vernachlässigt. Ferner muß, da es sich um<br />
eine Kleinsignalbetrachtung handelt, die Ruhestromquelle I0<br />
' nicht berücksichtigt werden.<br />
Prof. Dr.-Ing. R. Laur - 127 -<br />
ITEM
Kapitel 5 Analoge Schaltungstechnik Integrierte Schaltungen II<br />
v i<br />
v GS gmvGS gDS<br />
Abbildung 5.50: Kleinsignal-Ersatzschaltbild des Source-Folgers mit Stromquellen-Last<br />
v = v − v<br />
v<br />
GS<br />
o<br />
A<br />
V<br />
i<br />
o<br />
gm⋅vGS =<br />
g + g<br />
DS Q<br />
gm<br />
=<br />
g + g<br />
vo<br />
1<br />
= ≈<br />
v g + g<br />
1+<br />
g<br />
DS Q<br />
i DS Q<br />
Wegen gm >> gDS, gQ ergibt sich<br />
A ≈ 1, A < 1<br />
V V<br />
m<br />
( v v )<br />
⋅ −<br />
i o<br />
wie beim Emitterfolger. Der Sourcefolger wird ebenfalls als Impedanzwandler eingesetzt.<br />
5.6 Leistungsverstärker<br />
Externe Systeme müssen in der Regel mit einer geeignet großen Signalleistung versorgt werden.<br />
Hohe Signalleistungen bedingen hohe Signalströme und/oder Signalspannungen.<br />
• Hohe Signalströme erfordern spezielle Leistungstransistoren großer Fläche, die sich<br />
prinzipiell als Parallelschaltung einer Vielzahl an Transistoren ergeben<br />
• Signalspannung ist durch die Versorgungsspannung begrenzt, die bei integrierten Schaltungen<br />
in der Regel nicht variabel ist<br />
Die folgende Skizze stellt den Leistungsfluß dar<br />
PS<br />
PV<br />
LV<br />
Abbildung 5.51: Schematische Darstellung eines Leistungsverstärkers<br />
Prof. Dr.-Ing. R. Laur - 128 -<br />
ITEM<br />
PQ<br />
PL<br />
gQ<br />
RL<br />
vo
Kapitel 5 Analoge Schaltungstechnik Integrierte Schaltungen II<br />
PQ: von Versorgungsspannung gelieferte Leistung<br />
PL: an Last abfallende Signalleistung<br />
PV: Verlustleistung, die im Verstärker in Joulesche Wärme umgewandelt wird<br />
PS: Signalleistung am Eingang, vernachlässigbar<br />
Wirkungsgrad:<br />
L<br />
η = P<br />
P<br />
Q<br />
( )<br />
PV = PQ − PL = 1−ηPQ Joulesche Wärme muß abgeführt werden. Daraus folgt die Forderung nach optimalem η ,<br />
insbesondere bei Verstärkern hoher Leistung.<br />
5.6.1 Klassen von Leistungsverstärkern<br />
Unter der Annahme eines harmonischen Eingangssignals, ergibt sich folgende Klassifizierung<br />
von Leistungsverstärkern.<br />
Klasse-A: Transistor leitet in beiden Halbperioden. Kollektorstrom pendelt um den<br />
Gleichstrom im Arbeitspunkt IC´<br />
ic<br />
IC'<br />
π 2π 3π 4π<br />
Abbildung 5.52: Kollektorstrom eines Klasse-A Leistungsverstärkers<br />
Klasse-B: Transistor leitet lediglich während einer Halbwelle, IC’=0<br />
ic<br />
π 2π 3π 4π<br />
Abbildung 5.53: Kollektorstrom eines Klasse-B Leistungsverstärkers<br />
Prof. Dr.-Ing. R. Laur - 129 -<br />
ITEM<br />
ωt<br />
ωt
Kapitel 5 Analoge Schaltungstechnik Integrierte Schaltungen II<br />
Klasse-AB: Transistor leitet etwas länger als eine Halbperiode:<br />
ic<br />
IC'<br />
π 2π 3π 4π<br />
ωt<br />
I<br />
′<br />
C < i<br />
c<br />
Abbildung 5.54: Kollektorstrom eines Klasse-AB Leistungsverstärkers<br />
Klasse-C: Transistor leitet weniger als eine Halbperiode<br />
ic<br />
π 2π 3π 4π<br />
Abbildung 5.55: Kollektorstrom eines Klasse-C Leistungsverstärkers<br />
Klasse-C Leistungsverstärker haben lediglich in der HF-Technik Bedeutung und sollen daher<br />
nicht weiter betrachtet werden.<br />
Ohne geeignete Maßnahmen (Gegentakt-Endstufen) liefern Klasse AB und B starke Verzerrungen<br />
des Ausgangssignals.<br />
Klasse-A-Verstärker: (typisch: Emitterschaltung)<br />
Abbildung 5.56: Klasse-A-Verstärker<br />
v i<br />
V CC<br />
il<br />
R L<br />
Die Emitter-Grundschaltung ist ein typischer Klasse-A-Verstärker.<br />
Prof. Dr.-Ing. R. Laur - 130 -<br />
ITEM<br />
V CE'<br />
vo<br />
ωt
Kapitel 5 Analoge Schaltungstechnik Integrierte Schaltungen II<br />
Für ′ = VCC<br />
V CE ergibt sich die maximale Ausgangsleistung unter Vernachlässigung der Sätti-<br />
2<br />
gungsspannung.<br />
V<br />
IC′<br />
=<br />
2R<br />
CC<br />
L<br />
CC () ( )<br />
i t<br />
u<br />
L<br />
P<br />
L<br />
L<br />
V<br />
= 1+ cosω t<br />
2R<br />
V<br />
2<br />
L<br />
CC () t = ( 1+<br />
cosωt)<br />
2<br />
V<br />
4R<br />
() () () ( ) 2<br />
CC<br />
t = u t ⋅i<br />
t = 1+<br />
cosωt<br />
L<br />
L<br />
L<br />
2 T<br />
2<br />
VCC<br />
1<br />
V 1 1<br />
P ′<br />
L = ⋅<br />
4RL<br />
T ∫ 4RL<br />
2 4<br />
0<br />
2 CC<br />
( 1+<br />
cosω<br />
t)<br />
dt = ⋅ = VCC<br />
⋅ IC<br />
V<br />
PQ t = VCC ⋅ iL() t = 1+ cosω<br />
t<br />
2R<br />
CC<br />
() ( )<br />
2<br />
2 T<br />
2<br />
VCC<br />
1<br />
V<br />
P Q = ⋅<br />
′<br />
RL<br />
T ∫ 1<br />
2<br />
2R<br />
0<br />
L<br />
η max<br />
L<br />
2 CC<br />
( 1+<br />
cosω<br />
t)<br />
dt = ⋅ = VCC<br />
⋅ IC<br />
PL<br />
VCC ⋅ IC'<br />
1<br />
= = = = 025 . ⇒ sehr ineffizient<br />
P 4⋅V<br />
⋅I<br />
' 4<br />
Q<br />
CC C<br />
PV min = 075 . ⋅ PQ<br />
= 3⋅PL Die dreifache Ausgangsleistung fällt als Verlustleistung im günstigsten Fall am Transistor ab.<br />
Klasse-B-Verstärker, Gegentakt-Endstufe<br />
v i<br />
V CC<br />
V CC<br />
Abbildung 5.57: Klasse-B-Verstärker, Gegentakt-Endstufe<br />
In jeder Halbwelle leitet einer der Transistoren, wenn gilt:<br />
Q N<br />
Q P<br />
Prof. Dr.-Ing. R. Laur - 131 -<br />
ITEM<br />
i L<br />
R L<br />
v o
Kapitel 5 Analoge Schaltungstechnik Integrierte Schaltungen II<br />
V > 06 07V<br />
,....<br />
i<br />
Unter Vernachlässigung dieser Schwellenspannung ergibt sich ein Klasse-B-Betrieb.<br />
Der jeweils leitende Transistor bildet mit RL einen Emitterfolger.<br />
angestrebtes<br />
Verhalten<br />
Abbildung 5.58: Übertragungscharakteristik eines Klasse-B-Verstärkers<br />
1V<br />
Durch die Schwellenspannungen ergeben sich Verzerrungen von ≈±07 . V im Übergangsbereich.<br />
Unter Vernachlässigung der Schwellenspannung und bei maximal möglicher Ansteuerung<br />
ergibt sich für die Spannung und den Strom an der Last<br />
()<br />
v t = V ⋅cosω t<br />
L CC<br />
()<br />
i t<br />
L<br />
VCC<br />
= ⋅cosω t<br />
R<br />
L<br />
Die Augenblicksleistung ergibt sich zu<br />
()<br />
P t<br />
L<br />
2<br />
VCC<br />
2<br />
= ⋅cos<br />
ω t .<br />
R<br />
L<br />
Für die Wirkleistung folgt damit:<br />
P<br />
L<br />
T<br />
2<br />
1 1 VCC<br />
= PL<br />
() t dt<br />
T ∫ = ⋅ .<br />
2 R<br />
0<br />
Für die Versorgungsquellen ergibt sich symmetrisch:<br />
P<br />
+<br />
Q<br />
P<br />
−<br />
Q<br />
L<br />
T<br />
2<br />
2<br />
VCC<br />
1 2 1 V<br />
= ⋅ cos tdt<br />
= ⋅<br />
R T ∫ ω<br />
π R<br />
L<br />
0<br />
T<br />
T<br />
2<br />
L<br />
2<br />
CC<br />
2<br />
VCC<br />
1 2 1 V<br />
= − ⋅ cos tdt<br />
= ⋅<br />
R T ∫ ω<br />
π R<br />
L<br />
2<br />
CC<br />
L<br />
Prof. Dr.-Ing. R. Laur - 132 -<br />
ITEM<br />
vo<br />
1V<br />
1V<br />
1V<br />
vi
Kapitel 5 Analoge Schaltungstechnik Integrierte Schaltungen II<br />
2<br />
CC<br />
+ − 2 V<br />
PQ = PQ + PQ<br />
= ⋅<br />
π R<br />
Wirkungsgrad maximal: η<br />
L<br />
max<br />
PL<br />
π<br />
= ≤ = 0. 785 (theoretische Grenze)<br />
P 4<br />
Q<br />
Nachteil: Verzerrungen wegen Schwellenspannung, die sich im Übergangsbereich auswirkt<br />
Klasse-AB-Verstärker<br />
Die Verzerrung im Übergangsbereich wird reduziert, wenn jeder Transistor einen kleinen<br />
Ruhestrom erhält, d.h eine Vorspannung der Basis vorgenommen wird.<br />
v i<br />
V BB<br />
2<br />
V BB<br />
2<br />
Abbildung 5.59: Klasse AB-Verstärker<br />
VBEN<br />
VBEP<br />
VCC<br />
Q N<br />
iN<br />
iP<br />
Q P<br />
Jeder Transistor leitet für etwas mehr als eine Halbperiode; dies entspricht der Definition der<br />
Klasse AB. Beide Transsistoren arbeiten als Emitterfolger, deshalb gilt mit hoher Genauigkeit:<br />
Es gilt:<br />
VBB<br />
vo( vi) = vi<br />
+ −07<br />
. V<br />
2<br />
∂v<br />
∂v<br />
o<br />
i<br />
VSS<br />
≈ 1, da Spannungsverstärkung bei Emitterfolgern ≈ 1<br />
i ≈ I ⋅ e<br />
i<br />
N S<br />
P<br />
≈ I<br />
S<br />
⋅e<br />
V<br />
V<br />
BEN<br />
T<br />
V<br />
−<br />
V<br />
BEP<br />
T<br />
Prof. Dr.-Ing. R. Laur - 133 -<br />
ITEM<br />
i L<br />
RL<br />
v o
Kapitel 5 Analoge Schaltungstechnik Integrierte Schaltungen II<br />
2 VT<br />
2 VT<br />
2<br />
i ⋅ i = I ⋅ e = I ⋅ e = I mit I = I ⋅e<br />
N P S<br />
V −V<br />
BEN BEP<br />
IQ: Querstrom für vi = vo = 0<br />
S<br />
V<br />
BB<br />
Q<br />
Q S<br />
IQ<br />
Wird vi positiv, steigt in an; ip wird entsprechend ip<br />
= kleiner. vo steigt proportional zu vi.<br />
in<br />
Dies entspricht dem Funktionsprinzip des Emitterfolgers.<br />
Der Wirkungsgrad dieser Schaltung ist < 0.785 ⇒ höhere Verlustleistung durch Basisvorspannung.<br />
Vorspannungserzeugung für Klasse-AB-Verstärker<br />
vI<br />
IBIAS<br />
D1<br />
D2<br />
iBN<br />
iBP<br />
VCC<br />
VBB<br />
iCN<br />
QN<br />
QP<br />
iCP<br />
VSS<br />
Abbildung 5.60: Vorspannungserzeugung für Klasse AB-Verstärker<br />
iL<br />
RL<br />
Die Konstantstromquelle erzeugt eine Vorspannung in Höhe von zwei Diodenflußspannungen<br />
über die Dioden D1, D2. Mit steigender Eingangsspannung steigen Kollektor- und damit Basisstrom<br />
des NPN-Transistors. Dadurch wird VBB geringfügig verringert und ist damit nicht mehr<br />
konstant.<br />
Dieser Nachteil wird durch die folgende VBE-Multiplizierer-Schaltung vermieden.<br />
Prof. Dr.-Ing. R. Laur - 134 -<br />
ITEM<br />
vo<br />
2<br />
V<br />
2V<br />
BB<br />
T<br />
-0.6<br />
vo<br />
vi
Kapitel 5 Analoge Schaltungstechnik Integrierte Schaltungen II<br />
vi<br />
i 1=i Q<br />
R 1<br />
i2<br />
R2 I Bias<br />
Q1<br />
iC1<br />
iBN<br />
VBB<br />
i BP<br />
Abbildung 5.61: VBE -Multiplizierer-Schaltung<br />
V CC<br />
Bei richtiger Dimensionierung des Spannungsteilers R1, R2 ist der Basisstrom von Q1 vernachlässigbar<br />
gegen den Querstrom IR des Spannungsteilers. An RL fällt VBE1 ab. Damit gilt:<br />
I<br />
2<br />
VBE1<br />
= ≈ I<br />
R<br />
2<br />
1<br />
V1 = I1⋅R1 ; mit I2 ≈ I1<br />
R<br />
V1 ≈ I2⋅ R1 = VBE<br />
⋅<br />
R<br />
1<br />
2<br />
R1<br />
⎛ R1<br />
⎞<br />
VBB = VBE + V1= VBE + VBE<br />
⋅ = VBE<br />
⋅ ⎜1<br />
+ ⎟<br />
R ⎝ R ⎠<br />
2<br />
Daraus resultiert die Bezeichnung VBE-Multiplizierer. Ein Teil des Stromes der Stromquelle IBias<br />
liefert den Kollektorstrom von Q1. Steigt iBn an, verringert sich entsprechend IC1 ohne daß sich<br />
VBB merklich ändert.<br />
Der Nachteil dieser Schaltung ist, daß der von Qn benötigte Basisstrom von IBias abgezogen<br />
wird. Damit ergibt sich eine Abhängigkeit der Spannung VBB vom Signalstrom. Weiterhin ist<br />
die Temperaturabhängigkeit von VBB zu beachten.<br />
5.7 Quellenschaltungen<br />
Betriebsspannungen integrierter Schaltungen werden gemäß Spezifikation nur innerhalb von<br />
Toleranzgrenzen festgelegt. In digitalen Schaltungen gilt zumeist:<br />
V = 5V ± ∆V ; mit ∆V<br />
= ± 10%<br />
DD DD DD<br />
In analogen Schaltungen ist die Betriebsspannung zumeist frei wählbar. Ströme sind stark von<br />
toleranzbehafteten Parametern und die wiederum stark von der Temperatur abhängig. Häufig<br />
müssen innerhalb von Schaltungen Referenzspannungen und Konstantspannungsquellen verfügbar<br />
sein.<br />
Prof. Dr.-Ing. R. Laur - 135 -<br />
ITEM<br />
2<br />
iCN<br />
Q N<br />
Q P<br />
iCP<br />
V SS<br />
i L<br />
RL<br />
vo
Kapitel 5 Analoge Schaltungstechnik Integrierte Schaltungen II<br />
V0<br />
R i → 0<br />
Vref<br />
Abbildung 5.62: Idealisierte Spannungs- und Stromquelle<br />
Problematik: Typische Eigenschaften integrierter Schaltungen<br />
• große Toleranzen der Parameterwerte (≈ ± 20%)<br />
• Temperaturabhängigkeit von Parametern (z.B. VBE(T))<br />
RL<br />
I 0<br />
VCC ,VDD<br />
Iref<br />
RL<br />
R i →∞<br />
• Begrenzter Wertebereich der Parameter (Widerstände können nicht beliebig groß realisiert<br />
werden)<br />
Vorteilhaft sind folgende Eigenschaften von integrierten Schaltungen:<br />
• große Anzahl aktiver Elemente<br />
• Parameter-Tracking<br />
• starke thermische Kopplung benachbarter Elemente<br />
• Geometrie und Layout sind beeinflußbar<br />
Daraus resultieren eine Vielzahl typischer Quellenschaltungen.<br />
5.7.1 Konstantspannungsquellen, Referenzspannungsquellen<br />
Während bei digitalen Schaltungen in der Regel enge Toleranzgrenzen für die Betriebsspannung<br />
vorgeschrieben sind, können analoge Schaltungen häufig mit unterschiedlichen Betriebsspannungen<br />
versorgt werden. Das macht genaue und stabile Referenzspannungsquellen<br />
erforderlich.<br />
Idealfall ist eine Quelle mit einer von Temperatur und Betriebsspannung unabhängigen Leerlaufspannung<br />
mit verschwindendem Innenwiderstand.<br />
Als einfache Spannungsquelle kann der VBE-Multiplizierer verwendet werden.<br />
Prof. Dr.-Ing. R. Laur - 136 -<br />
ITEM
Kapitel 5 Analoge Schaltungstechnik Integrierte Schaltungen II<br />
R1<br />
IQ<br />
IB<br />
R2 VBE<br />
Abbildung 5.63: VBE -Multiplizierer-Schaltung<br />
Bei geeigneter Dimensionierung des Spannungsteilers und hinreichend hoher Stromverstärkung<br />
des Transistors gilt mit guter Näherung:<br />
R + R<br />
V ≈V ( I ) ⋅<br />
R<br />
IC<br />
I<br />
VOUT<br />
IC<br />
mit I ≈ I , I > I , I =<br />
β<br />
1 2<br />
OUT BE C C Q B B<br />
2<br />
Der Kleinsignal-Innenwiderstand ergibt sich dann zu:<br />
r<br />
out<br />
∂v<br />
∂v<br />
= ≈ =<br />
∂i<br />
∂i<br />
C<br />
R + R<br />
R<br />
1 2<br />
2<br />
∂vBE<br />
⋅ ≈<br />
∂i<br />
R1 + R2<br />
1<br />
⋅ ≈<br />
R g<br />
C 2 m<br />
R + R<br />
R<br />
1 2<br />
2<br />
VT<br />
I<br />
⋅ , gm<br />
≈<br />
I V<br />
Niedrige Innenwiderstände ergeben sich nur auf Kosten hoher Ströme IC, dies bedeutet eine<br />
hohe Verlustleistung. Wesentlicher Nachteil der VBE-Multiplizierer-Schaltung ist allerdings die<br />
Temperaturabhängigkeit der Basis-Emitterspannung zu etwa 2mV/K.<br />
Bandgap-Reference-Konstantspannungsquelle<br />
Eine der bekanntesten Schaltungen zur Realisierung einer temperaturunabhängigen Spannungsreferenz<br />
ist die Bandgap-Referenzspannungsquelle. Mit dieser Schaltung läßt sich bei<br />
geeigneter Dimensionierung aufgrund gegenläufiger, sich kompensierender Temperatureffekte<br />
eine stabile Referenzspannung von VREF ≈ 1.25V erzeugen. Die Referenzspannung wird aus<br />
einer Basis-Emitter-Spannung VBE und einer Spannung VT ⋅K zusammengesetzt (VT = Temperaturspannung).<br />
Dies entspricht etwa dem Si-Bandabstand, daher die Bezeichnung. Dabei wählt<br />
man die Spannung VT⋅K so, daß deren positiver Temperaturkoeffizient gerade den negativen<br />
Koeffizienten von VBE kompensiert. Abbildung 5.64 zeigt das generelle Prinzip. Die Spannung<br />
VBE ist mit einem Temperaturkoeffizienten von -2 mV/°C behaftet. Der Temperaturkoeffizient<br />
der Temperaturspannung VT hat den positiven Wert von +0,085 mV/°C. Die Ausgangsspannung<br />
errechnet sich nach folgender Gleichung (K ist eine Konstante, mit der die Temperaturspannung<br />
multipliziert wird):<br />
VREF = VBE + K⋅VT<br />
Es soll nun zunächst der Wert für K bestimmt werden, bei dem der Temperaturkoeffizient für<br />
die Ausgangsspannung Null ist.<br />
2<br />
K = = 23, 5<br />
0, 085<br />
Prof. Dr.-Ing. R. Laur - 137 -<br />
ITEM<br />
C<br />
C<br />
T
Kapitel 5 Analoge Schaltungstechnik Integrierte Schaltungen II<br />
23, 5 ⋅26 mV ≈ 0, 6 V , bei Raumtemperatur<br />
Nimmt man für VBE einen Wert von 0,65V an, so errechnet sich eine Ausgangsspannung von<br />
1,25 V.<br />
V CC<br />
Generator<br />
VT<br />
Verstärker<br />
K<br />
+<br />
VREF = VBE + KVT Abbildung 5.64: Prinzipschaltbild der Bandgap-Referenzspannungsquelle<br />
In Abbildung 5.65 ist die entsprechende Transistorschaltung der Bandgap-<br />
Referenzspannungsquelle dargestellt.<br />
V 1<br />
R V<br />
R 1<br />
V BE1<br />
I 1<br />
T 1<br />
V BE2<br />
R2<br />
R 3<br />
I 2<br />
T 2<br />
I 3<br />
V2<br />
V BE3<br />
Abbildung 5.65: Bandgap-Referenzspannungsquelle<br />
I3 ≈ I2<br />
∆V BE<br />
T 3<br />
V REF<br />
I1<br />
I2⋅ R3 = VBE1 − VBE2 = VT⋅<br />
ln = ∆VBE , T1<br />
= T2 , beide Transistoren identisch<br />
I<br />
2<br />
Prof. Dr.-Ing. R. Laur - 138 -<br />
ITEM
Kapitel 5 Analoge Schaltungstechnik Integrierte Schaltungen II<br />
I<br />
2<br />
V<br />
R R V<br />
∆ BE 1 I<br />
= = ⋅ T ⋅ln<br />
I<br />
3 3<br />
R<br />
V I R<br />
R V<br />
2 I<br />
2 = 2⋅ 2 = ⋅ T ⋅ln<br />
I<br />
3<br />
R<br />
V V V V<br />
R V<br />
2 I1<br />
REF = BE3 + 2 = BE3 + ⋅ T ⋅ln<br />
≈ 1.26V<br />
I<br />
1<br />
2<br />
1<br />
2<br />
3<br />
2<br />
Die letzte Gleichung entspricht der Gleichung des Prinzipschaltbildes, wobei sich die folgende<br />
Konstante K ergibt:<br />
K R2<br />
I<br />
= ⋅ln<br />
R I<br />
3<br />
1<br />
2<br />
Bei geeigneter Dimensionierung der Bauelemente ergibt sich die Referenzspannung von ca.<br />
1,25 V. Aufgrund des temperaturabhängigen Quotienten I1/ I2<br />
ist die Referenzspannung nur<br />
in einem bestimmten Temperaturbereich um den nominalen Wert nahezu konstant. Bei Verwendung<br />
eines Operationsverstärkers läßt sich eine Schaltung aufbauen, die unabhängig von<br />
dem temperaturabhängigen Quotienten arbeitet.<br />
Abbildung 5.66 zeigt die Referenzspannungsquelle mit Operationsverstärker.<br />
R 2<br />
R 3<br />
T 2<br />
I 2<br />
R1<br />
T 1<br />
I 1<br />
∆V E<br />
-<br />
+<br />
V REF<br />
Abbildung 5.66: Bandgap-Referenzspannungsquelle mit Operationsverstärker<br />
Für Av →∞ gilt: ∆VE = 0 , bei endlicher Ausgangsspannung ⇒ V1<br />
≈ V2<br />
I<br />
I<br />
1<br />
2<br />
R2<br />
=<br />
R<br />
1<br />
I1⋅IS2 R ⋅ I<br />
V3 = ∆VBE = VBE1 − VBE2 = VT⋅ln<br />
= VT<br />
⋅ln<br />
I ⋅ I R ⋅ I<br />
2 S1<br />
V = V + V ≈ V + V = V + R ⋅<br />
2 S 2<br />
1 S1<br />
REF BE1 1 BE1 2 BE1<br />
2 I2 mit I2 ≈ I3<br />
Prof. Dr.-Ing. R. Laur - 139 -<br />
ITEM
Kapitel 5 Analoge Schaltungstechnik Integrierte Schaltungen II<br />
V V R V R<br />
V<br />
R R V<br />
3<br />
2 R2<br />
I<br />
REF = BE1 + 2⋅<br />
= BE1 + ⋅ T ⋅ln ⋅<br />
R I<br />
3<br />
Wenn beide Transistoren identisch sind (IS1 = IS2) ergibt sich:<br />
V V R V R<br />
V<br />
R R V<br />
3<br />
2 R<br />
REF = BE1 + 2⋅<br />
= BE1 + ⋅ T ⋅ln<br />
3<br />
3 R<br />
= V + K⋅V BE1 T<br />
3<br />
Diese Gleichung entspricht der Gleichung des Prinzipschaltbildes (siehe Abbildung 5.64).<br />
Die Schaltung nach Abbildung 5.66 kann in CMOS-Schaltungstechnik realisiert werden. T1<br />
und T2 sind dann durch die verfügbaren Substrattransistoren zu ersetzen.<br />
5.7.2 Konstantstromquellen, Stromspiegel<br />
Stromquellen werden häufig als sogenannte Stromspiegel realisiert. Dabei wird z.B. mit einem<br />
Widerstand eine Stromreferenz erzeugt, die eine stromgesteuerte Stromquelle ansteuert.<br />
Die gesteuerte Quelle besitzt einen hohen Innenwiderstand. Damit ist der Strom durch die<br />
Last weitgehend spannungsunabhängig. Die Last belastet den Referenzstrom nicht. Der Referenzstrom<br />
erscheint "gespiegelt" am Ausgang der gesteuerten Quelle.<br />
VCC<br />
R<br />
1<br />
2<br />
1<br />
S 2<br />
S1<br />
VCC<br />
RL (beliebiges Lastelement)<br />
IREF α⋅I REF R i →∞<br />
Abbildung 5.67: Prinzipschaltbild des Stromspiegels<br />
Die folgende Schaltung zeigt eine einfache Umsetzung des Prinzips mit Bipolartransistoren.<br />
Wegen VBE1 = VBE2 gilt unter Vernachlässigung des Ausgangswiderstandes von T2 (Early-<br />
Effekt) und bei identischen, benachbarten Transistoren IC2 ≈ IC1 und für β1 ≈ β2 >> 1:<br />
IC2 ≈ IC1 ≈ IREF<br />
Prof. Dr.-Ing. R. Laur - 140 -<br />
ITEM<br />
IL
Kapitel 5 Analoge Schaltungstechnik Integrierte Schaltungen II<br />
V CC<br />
R 1<br />
T1<br />
I REF<br />
Abbildung 5.68: Einfache Konstantstromquelle (Stromspiegel)<br />
IC1<br />
Wegen des Early-Effektes von T2 ist der Ausgangswiderstand begrenzt.<br />
I B1<br />
Die Toleranzen der "Bauelemente" , die Basisströme IB1 und IB2 sowie der begrenzte Ausgangswiderstand<br />
von T2 führen zu einer Abweichung vom Idealfall<br />
IC2 ≈ I REF<br />
Der Strom IC2 kann um den Faktor n vergrößert werden, wenn die Emitterfläche von T2 um den<br />
Faktor n vergrößert wird, oder besser, wenn n zu T1 identische Transistoren parallelgeschaltet<br />
werden:<br />
IC2 = n⋅IREF IB2<br />
T2<br />
RL<br />
IC2<br />
IREF IREF IREF<br />
Abbildung 5.69: Stromspiegel mit mehren Transistoren<br />
Prof. Dr.-Ing. R. Laur - 141 -<br />
ITEM
Kapitel 5 Analoge Schaltungstechnik Integrierte Schaltungen II<br />
VCC<br />
IC1<br />
T1<br />
IREF<br />
Abbildung 5.70: Modifizierter Stromspiegel (Widlar-Stromspiegel)<br />
R1<br />
I B1<br />
Erhält T2 einen Emitterwiderstand RE (Widlar-Schaltung) ergibt sich durch Stromgegenkopplung<br />
eine Erhöhung des Ausgangswiderstands. Steigt auf Grund des Early-Effektes (Anstieg<br />
des Kollektorpotentials von T2) IC2 an, wird durch den Spannungsabfall an RE die Basis-<br />
Emitterspannung an T2 reduziert, was der Stromzunahme entgegenwirkt.<br />
In guter Näherung gilt, wenn das Basispotential von T2 als konstant angenommen wird:<br />
mit:<br />
∆I<br />
C2<br />
ergibt sich:<br />
∆VCE2<br />
≈ − gm⋅∆VBE r<br />
CE<br />
∆V ≈ ∆I ⋅R ≈ ∆I<br />
⋅R<br />
BE2 E2 E C2 E<br />
∆V ∆V<br />
∆I ≈ −g ⋅R ⋅∆I<br />
2<br />
IB2<br />
CE2 CE 2<br />
C2 m E C2<br />
=<br />
rCE ( 1+<br />
gm⋅RE)<br />
⋅rCE<br />
∆I≈ r<br />
o<br />
C 2<br />
1<br />
∆VCE2<br />
+ g ⋅R ⋅r<br />
( )<br />
m E CE<br />
∆VCE2<br />
= ≈ ( 1 + g ⋅R ) ⋅r<br />
∆I<br />
C2<br />
V = V − I ⋅ R<br />
m E CE<br />
Der Ausgangswiderstand wird gegenüber der einfachen Stromspiegelschaltung um den Faktor<br />
1+ gm⋅RE erhöht, der Early-Effekt wird also deutlich reduziert.<br />
Wegen<br />
BE2 BE1 E2 E<br />
ist bei gleicher Transistorgröße IC2 < IC1. Durch Vergrößerung der Emitterfläche von T2 kann<br />
dieser Effekt kompensiert werden.<br />
Prof. Dr.-Ing. R. Laur - 142 -<br />
ITEM<br />
T2<br />
R L<br />
I C2<br />
RE
Kapitel 5 Analoge Schaltungstechnik Integrierte Schaltungen II<br />
Mit<br />
I ≈ I ⋅ e<br />
C1S V<br />
V<br />
BE1<br />
gilt für den Kollektorstrom von T2<br />
I<br />
C 2<br />
Der Faktor<br />
≈ I<br />
S<br />
⋅e<br />
V<br />
T<br />
BE1<br />
−I<br />
V<br />
C 2<br />
T<br />
⋅R<br />
IC2⋅RE −<br />
V IC2<br />
T α = e ≈<br />
I<br />
C1<br />
E<br />
≈ I<br />
C1<br />
⋅e<br />
−I<br />
C 2⋅R<br />
V<br />
T<br />
E<br />
.<br />
bestimmt das Verhältnis von IC2 und IC1. Ist dieses und IC2 vorgegeben, kann der Emitterwiderstand<br />
RE berechnet werden.<br />
Beispiel:<br />
Mit<br />
g<br />
m<br />
I<br />
=<br />
V<br />
C 2<br />
T<br />
IC2= 100µ A , α = 01 .<br />
R<br />
E<br />
VT<br />
≈ - ⋅ln α ≈ 600Ω<br />
I<br />
C 2<br />
ergibt sich als Faktor der Erhöhung des Ausgangswiderstandes:<br />
1+ g ⋅ R = 1+ 23≈33<br />
m E , ,<br />
Bei der Wilson-Schaltung (siehe Abbildung 5.71) ist die Erhöhung des Ausgangswiderstandes<br />
erheblich höher.<br />
V CC<br />
Abbildung 5.71: Wilson-Stromquelle<br />
R1<br />
I C1<br />
T1<br />
IREF<br />
Bei identischen Transistoren mit β1 = β2 = β3 >> 1 gilt:<br />
Prof. Dr.-Ing. R. Laur - 143 -<br />
ITEM<br />
T3<br />
T 2<br />
R L<br />
I C3
Kapitel 5 Analoge Schaltungstechnik Integrierte Schaltungen II<br />
Erhöht sich z.B. aufgrund von Laständerungen das Kollektorpotential von T3 bleibt VE3 konstant.<br />
Es gilt:<br />
V 2 = V 2 = V<br />
V = V + V<br />
CE BE BE1<br />
CE1 BE2 BE3<br />
IREF bleibt näherungsweise unverändert und es gilt:<br />
I ≈ I ≈ I ≈ I<br />
C2 C3 C1 REF<br />
Für den Ausgangsstrom ergibt sich:<br />
∆I = ∆I + ∆I = − ∆I + ∆I ⇒ ∆I ≈ ⋅∆<br />
C2 B3 C3 C1 C3 C3<br />
2<br />
I C1<br />
, da ∆I<br />
C1 ≈ ∆IC2<br />
Daraus resultiert:<br />
β F<br />
∆IC 3 = −β<br />
F ⋅∆I<br />
C1<br />
+ ∆VC3<br />
⋅ gCE3<br />
= − ⋅∆I<br />
C3<br />
+ ∆VC3<br />
⋅ gCE<br />
.<br />
2<br />
Der Ausgangswiderstand der Wilson-Quelle ergibt sich mit βF >> 1 zu:<br />
r<br />
o<br />
∆VC3<br />
⎛ βF⎞βF = ≈ ⎜1+<br />
⎟ ⋅rCE ≈ ⋅r<br />
∆I<br />
⎝ 2 ⎠ 2<br />
C3<br />
3 CE3<br />
Dies entspricht einer Erhöhung des Ausgangswiderstands gegenüber der einfachen Stromspiegelschaltung<br />
um einen Faktor von etwa 50 ... 75.<br />
Einfache Stromspiegelschaltung in MOS-Technik<br />
Die einfache Stromspiegelschaltung in MOS-Technik ist entsprechend Abbildung 5.72 aufgebaut.<br />
I REF<br />
M 1<br />
V DD<br />
R 1<br />
V DD<br />
Abbildung 5.72: Einfache Stromspiegel-Schaltung in MOS-Technik<br />
Für den Referenzstrom gilt hier:<br />
Prof. Dr.-Ing. R. Laur - 144 -<br />
ITEM<br />
I o<br />
R L<br />
M 2
Kapitel 5 Analoge Schaltungstechnik Integrierte Schaltungen II<br />
I<br />
1 1<br />
2<br />
= ⋅( V − V ) = ⋅β⋅( V −V ) ⋅ ( 1+<br />
λ ⋅V<br />
)<br />
R 2<br />
REF DD GS GS T GS<br />
1<br />
Mit dem Widerstand R1 wird der Referenzstrom eingestellt. Bei gegebener Dimensionierung<br />
von Transistor bestimmt der Referenzstrom die Steuerspannung VGS.<br />
Die eindeutige Ab-<br />
T 1<br />
hängigkeit der Gate-Source-Spannung des Transistors T1 vom Referenzstrom wird von dem<br />
Kurzschluß zwischen Drain und Gate von T1 verursacht. Für den Fall, daß beide Transistoren<br />
gleich sind, gilt näherungsweise:<br />
IREF = Io<br />
Bei Vernachlässigung der Kanallängenmodulation ist der Ausgangsstrom Io unabhängig von<br />
der Ausgangsspannung Vo.<br />
Bei unterschiedlicher Dimensionierung der Transistoren haben die Ströme ein konstantes<br />
Verhältnis zueinander:<br />
I<br />
I<br />
o<br />
REF<br />
= 2 2<br />
W / L<br />
W / L<br />
1 1<br />
In MOS-Stromspiegelschaltungen treten zwei Störeffekte auf. Die Einsatzspannung benachbarter<br />
Transistoren ist aufgrund von Herstellungstoleranzen nicht genau gleich. Für Kanallängen<br />
von 1 µm sind Abweichungen der Einsatzspannungen von 20 mV bis 40 mV realistisch.<br />
Wegen der Kanallängenmodulation hat der Transistor T2<br />
einen endlichen Ausgangswiderstand.<br />
Der Drainstrom von T2 ist somit schwach von der Ausgangsspannung Vo abhängig<br />
(ra ≈ rDS). Für den Fall, daß der Ausgangsstrom ein ganzzahliges Vielfaches des Referenzstroms<br />
sein soll, ist es sinnvoll, den Transistor T2 durch die Parallelschaltung von Transistoren,<br />
die genauso wie Transistor T1 dimensioniert sind, zu ersetzen. Durch dieses als „Matching“<br />
bezeichnete Prinzip können Randeffekte vermieden werden.<br />
Nachteilig gegenüber der Bipolarschaltung ist, daß die minimale Ausgangsspannung erheblich<br />
größer ist. Es gilt:<br />
V > V V<br />
o omin DS ≈ AT<br />
da sonst T2 im Triodengebiet betrieben wird.<br />
Die minimale Ausgangsspannung des Stromspiegels in MOS-Technologie liegt beispielsweise<br />
im Bereich von 1V, während sie bei der Bipolarschaltung der erheblich niedrigeren Sättigungsspannung<br />
von etwa 150mV entspricht.<br />
Wilson-Stromquelle in MOS-Technik<br />
Wie in der Bipolartechnik läßt sich auch in der MOS-Technik mit einer Wilson-<br />
Stromquelle (Abbildung 5.73) ein höherer Ausgangswiderstand realisieren.<br />
Prof. Dr.-Ing. R. Laur - 145 -<br />
ITEM
Kapitel 5 Analoge Schaltungstechnik Integrierte Schaltungen II<br />
I REF<br />
M 1<br />
V DD<br />
Abbildung 5.73: Wilson-Stromquelle in NMOS-Technik<br />
Wie anhand von Abbildung 5.73 zu erkennen, ist die Gate-Source-Spannung von T3 gleich der<br />
Drain-Gate-Spannung von T1. Aus diesem Grund benötigt die Wilson-Quelle keinen Kurzschluß<br />
zwischen Drain und Gate von T1. Eine Erhöhung des Ausgangsstromes Io bewirkt eine<br />
Vergrößerung der Gate-Source-Spannung von T1. Dies bedeutet wegen der Rückkopplung<br />
eine Verkleinerung der Gate-Source-Spannung von T3. Damit wird der auslösenden Ursache<br />
entgegengewirkt.<br />
Eine Berechnung des Ausgangswiderstandes ergibt das folgende Ergebnis:<br />
r = r ⋅g ⋅r<br />
o DS3 m1 DS1<br />
Die Wilson-Stromquelle weist gegenüber der einfachen Stromspiegelschaltung einen um den<br />
Faktor gm1⋅rDS1 höheren Ausgangswiderstand auf.<br />
Die Wilson-Quelle läßt sich auch in PMOS-Technologie realisieren, heute werden jedoch<br />
zumeist CMOS-Schaltungen verwendet.<br />
Prof. Dr.-Ing. R. Laur - 146 -<br />
ITEM<br />
V DD<br />
I o<br />
M 3<br />
M 2
Kapitel 5 Analoge Schaltungstechnik Integrierte Schaltungen II<br />
5.8 Differenzverstärker<br />
Zwei beliebige Signale v1, v2 können eindeutig in ein Differenzsignal vD und ein Gleichtaktsignal<br />
vC zerlegt werden:<br />
vD<br />
v D v 1 = + vC<br />
; v 2 = − + vC<br />
;<br />
2<br />
2<br />
v D<br />
= v − v ;<br />
1<br />
2<br />
v C<br />
v1<br />
+ v2<br />
=<br />
2<br />
Aufgabe eines Differenzverstärkers ist die alleinige Verstärkung des Differenzsignals vD unabhängig<br />
vom Gleichsignal vC.<br />
Abbildung 5.74: Prinzipschaltbild eines Differenzverstärkers<br />
Das Übertragungsverhalten lautet:<br />
v = A ⋅v<br />
+ A ⋅v<br />
o<br />
VD<br />
D<br />
VC<br />
C<br />
v 1<br />
v 2<br />
v D<br />
Die Differenzverstärkung AVD soll im Vergleich zur Gleichtaktverstärkung AVC möglichst<br />
groß sein.<br />
Das Verhältnis<br />
AVD<br />
= CMRR ≈<br />
A<br />
VC<br />
4 5 [ 10 ... 10 ]<br />
wird als Gleichtaktunterdrückung (Common Mode Rejection Ratio, CMRR) bezeichnet, die<br />
im Idealfall möglichst groß sein sollte.<br />
Differenzverstärker sind für die monolithische Integration besonders geeignet, weil benachbarte<br />
Elemente auf einem Chip in ihren Parametern gut übereinstimmen, während die Absolutwerte<br />
der Parameter über eine Charge erheblich streuen können (Tracking). Zudem haben<br />
benachbarte Elemente auf einem Chip bei geeigneter Anordnung eine nahezu identische<br />
Temperatur. Temperatureffekte können damit als Gleichsignale aufgefaßt werden, die hinreichend<br />
unterdrückt werden.<br />
Geringe Parameterabweichungen gleicher benachbarter Elemente sind nicht zu vermeiden.<br />
Diese Unsymmetrien führen zu einer Ausgangsspannung V 0 ≠ 0 für V 0 . Als Eingangs-<br />
Offset-Spannung V<br />
= D<br />
OS wird die Spannung bezeichnet, die am Eingang für V 0 ≡ 0 erforderlich<br />
ist.<br />
[ µ .. ]<br />
V = V | 0 ≈ 100 V. 3mV<br />
OS D Vo =<br />
Entsprechend kann der Eingangs-Offset-Strom IOS definiert werden. Beide Parameter sind<br />
abhängig von Temperatur, Betriebsspannung und Gleichtaktsignal VC.<br />
Prof. Dr.-Ing. R. Laur - 146 -<br />
ITEM<br />
v O
Kapitel 5 Analoge Schaltungstechnik Integrierte Schaltungen II<br />
5.8.1 Bipolarer Differenzverstärker<br />
Der Differenzverstärker ist meist nach dem in Abbildung 5.75 gezeigten Prinzip aus zwei<br />
Transistoren mit gekoppelten Emittern aufgebaut. Es soll zunächst das Gleichspannungsverhalten<br />
des Differenzverstärkers betrachtet werden. Dabei wird von genau gleichen, idealen<br />
Transistoren (z.B. IS1 = IS2), gleichen Kollektorwiderständen sowie einer idealen Konstantstromquelle<br />
ausgegangen.<br />
V1<br />
RC<br />
T1<br />
+VCC<br />
I C1 IC2<br />
V01 V02<br />
REE<br />
VO<br />
IEE<br />
-VEE<br />
Abbildung 5.75: Differenzverstärker mit Emitterkopplung<br />
Großsignalverhalten für<br />
R EE →∞<br />
Kirchhoffsche Maschengleichung:<br />
− V + V − V + V =<br />
1 BE1 BE2<br />
2 0<br />
Für Transistoren im aktiven Bereich (nicht in Sättigung) gilt:<br />
IC1<br />
I<br />
VBE1 = VT⋅ln<br />
und VBE 2 = V T ⋅ln<br />
I<br />
I<br />
S1<br />
C2<br />
S 2<br />
⎛ IC1<br />
IC2<br />
⎞<br />
VD = V1 − V2 = VBE1 − VBE2 = VT<br />
⋅⎜ln −ln<br />
⎟<br />
⎝ IS1<br />
IS<br />
2 ⎠<br />
Mit IS1 = IS2<br />
= IS folgt:<br />
I ⎛ ⎞ ⎛ ⎞<br />
C1<br />
V1<br />
−V2<br />
VD<br />
= exp ⎜<br />
⎟ = exp ⎜<br />
⎟ , mit VD = V 1 −V2.<br />
IC<br />
2 ⎝ VT<br />
⎠ ⎝ VT<br />
⎠<br />
Prof. Dr.-Ing. R. Laur - 147 -<br />
ITEM<br />
T2<br />
R C<br />
V2
Kapitel 5 Analoge Schaltungstechnik Integrierte Schaltungen II<br />
Mit<br />
⎛ 1 ⎞ 1<br />
β<br />
IE1 =− ( IB1 + IC1) =− ⎜ + 1⎟<br />
⎜ ⎟<br />
⋅ IC1<br />
= − ⋅IC1<br />
, mit α =<br />
⎝ βf⎠α f<br />
1+<br />
β<br />
ergibt sich für IEE ohne Berücksichtigung von REE<br />
1<br />
IEE =− ( IE1 + IE2) = ⋅ ( IC1 + IC2)<br />
α f<br />
Für die Kollektorströme gilt dann:<br />
f ⋅ IEE<br />
IC1<br />
=<br />
vD<br />
1+<br />
−<br />
vT<br />
⎛<br />
α<br />
⎞<br />
exp⎜<br />
⎟<br />
⎝ ⎠<br />
und<br />
α f ⋅ IEE<br />
IC2<br />
=<br />
⎛ vD<br />
⎞<br />
1+<br />
exp⎜<br />
⎟<br />
⎝ vT<br />
⎠<br />
I C2<br />
-2VT<br />
-VT<br />
I C<br />
0<br />
VT<br />
2VT<br />
I C1<br />
α f ⋅ IEE<br />
linearer Übertragungsbereich<br />
Abbildung 5.76: Kollektorströme des bipolaren Differenzverstärkers in Abhängigkeit von<br />
der Eingangsspannungsdifferenz<br />
Die Ausgangsspannungen berechnen sich zu:<br />
Vo1 = VCC − IC1⋅RC V = V − I ⋅ R<br />
o2 CC C2<br />
C<br />
⎛ − VD<br />
⎞<br />
VO = Vo1 − Vo2 = α f ⋅IEE ⋅tanh<br />
⎜ ⎟ ⋅ RC<br />
⎝ 2 ⋅VT<br />
⎠<br />
-V T<br />
Abbildung 5.77: Übertragungskennlinie des Differenzverstärkers<br />
V O<br />
V T<br />
∆V i<br />
αf ⋅IEE⋅RC V D<br />
−αf ⋅IEE⋅RC Prof. Dr.-Ing. R. Laur - 148 -<br />
ITEM
Kapitel 5 Analoge Schaltungstechnik Integrierte Schaltungen II<br />
Für V D ist die Ausgangsspannung V . Somit ist eine problemlose Ankopplung (direkte<br />
Kopplung) weiterer Stufen ohne Übertrager oder Koppelkapazitäten möglich. Für<br />
= 0 o = 0<br />
VD < VT<br />
ergibt sich ein lineares Übertragungsverhalten.<br />
5.8.2 Kleinsignalverhalten des Differenzverstärkers<br />
Im folgenden wird das Kleinsignalverhalten des Differenzverstärkers bei annähernd gleichen<br />
Arbeitspunkten der Transistoren (Vo ≈ 0, I C1 ≈ IC2<br />
≈ IC) betrachtet. Hierzu werden zunächst<br />
die folgenden Größen eingeführt:<br />
Eingangsdifferenzspannung:<br />
v = v −v<br />
D<br />
1 2<br />
Gleichtaktspannung:<br />
v<br />
( v + v )<br />
c =<br />
1<br />
2<br />
2<br />
Diese Ersatzgrößen für v1 und v2 erleichtern die Bestimmung der Kleinsignalgrößen. Bei der<br />
Berechnung einer Differenzgröße wird die Gleichtaktspannung vc = 0 gesetzt, so daß<br />
v<br />
v v D<br />
1 =− 2 = gilt. Die beiden Transistoren werden gegenphasig in Emitterschaltung betrie-<br />
2<br />
ben. Die Gleichtaktgrößen können für vD = 0, d.h. v1 = v2 = vC berechnet werden. Dieser Fall<br />
entspricht der Parallelschaltung der Basis-Emitter-Strecken beider Transistoren.<br />
Die Kleinsignalübertragungskenngrößen hängen davon ab, ob nur ein Ausgang oder beide<br />
Ausgänge zur Ansteuerung einer nachfolgenden Stufe verwendet werden.<br />
Gegentaktverstärkung, Verwendung nur eines Ausgangs<br />
Durch Gegentaktansteuerung bleibt das Emitterpotential konstant, jeder Zweig wirkt wie eine<br />
Emittergrundschaltung.<br />
A<br />
VD<br />
v<br />
=<br />
v<br />
02<br />
D v = 0<br />
c<br />
1 v<br />
= −<br />
2 v<br />
02<br />
2 v = 0<br />
c<br />
1<br />
= ⋅ R<br />
2<br />
wobei gm der Steilheit der Transistoren in Emitterschaltung entspricht.<br />
Gegentaktverstärkung mit Differenzausgang<br />
vO = 2⋅ vO2<br />
A = 2⋅<br />
A = R ⋅ g<br />
VD2<br />
VD<br />
Gleichtaktverstärkung<br />
v = v = v ≈ v<br />
1 2<br />
C E<br />
C<br />
m<br />
C<br />
⋅ g<br />
m<br />
Bei Gleichtaktansteuerung wird das Emitterpotential wegen VBE ≈ const. um vC angehoben.<br />
Der zusätzliche Strom über REE verteilt sich auf beide Transistoren.<br />
iEE<br />
vE<br />
iC<br />
≈ ≈<br />
2 2⋅<br />
R<br />
EE<br />
v ⋅ R<br />
vo2=−iC ⋅RC ≈−<br />
2⋅<br />
R<br />
E C<br />
EE<br />
Prof. Dr.-Ing. R. Laur - 149 -<br />
ITEM
Kapitel 5 Analoge Schaltungstechnik Integrierte Schaltungen II<br />
A<br />
VC<br />
v<br />
=<br />
v<br />
o2<br />
c<br />
v<br />
D<br />
= 0<br />
v<br />
=<br />
v<br />
o2<br />
Gleichtaktunterdrückung<br />
E<br />
v<br />
D<br />
= 0<br />
RC<br />
≈ −<br />
2⋅<br />
R<br />
EE<br />
Das Verhältnis von Differenzspannungsverstärkung zu Gleichtaktspannungsverstärkung gibt<br />
die Gleichtaktunterdrückung (Common Mode Rejection Ratio, CMRR) an:<br />
AVD<br />
IEE<br />
CMRR = ≈ REE ⋅gm≈ REE<br />
⋅<br />
AVC<br />
2 ⋅VT<br />
5.8.3 Differenzverstärker mit aktiver Last<br />
Bisher wurde der Differenzverstärker mit linearen Kollektorwiderständen betrachtet. Um mit<br />
dieser Schaltung auch bei geringer Verlustleistung und somit geringen Strömen noch eine<br />
ausreichend hohe Spannungsverstärkung zu erzielen, sind infolge der geringen Transistorsteilheit<br />
große Widerstände erforderlich, die viel Platz benötigen. Verwendet man hingegen<br />
eine Stromspiegelschaltung aus zwei gleichen Transistoren als aktive Last (siehe Abbildung<br />
5.78), ergibt sich ein erheblich geringerer Platzbedarf.<br />
1<br />
v D<br />
2<br />
i C1<br />
T 3<br />
R EE<br />
T 1<br />
+V CC<br />
-V EE<br />
I EE<br />
T 2<br />
T 4<br />
i C1 i L= i c1-i c2<br />
Abbildung 5.78: Differenzverstärker mit aktiver Last<br />
i C2<br />
Bei Vernachlässigung des Earlyeffekts, der Offsetspannung und der endlichen Stromverstärkung<br />
von T1 und T2, ergibt sich ein Ausgangsstrom von<br />
i = i −i<br />
L c1 c2<br />
( )<br />
va = iL ⋅RL ≈ ic1 −ic2 ⋅RL<br />
vD<br />
i c1<br />
≈ g m ⋅ = i<br />
2<br />
A ≈ g ⋅ R<br />
VD<br />
m<br />
L<br />
c2<br />
Unter der Berücksichtigung des Early-Effektes von T2 und T4:<br />
Prof. Dr.-Ing. R. Laur - 150 -<br />
ITEM<br />
R L<br />
v a
Kapitel 5 Analoge Schaltungstechnik Integrierte Schaltungen II<br />
A<br />
VD<br />
=<br />
g<br />
CE 4<br />
g<br />
+ g<br />
m<br />
CE 2<br />
1<br />
+<br />
R<br />
L<br />
5.8.4 CMOS Differenzverstärker<br />
Die CMOS-Schaltung, die in Abbildung 5.79 dargestellt ist, entspricht der bipolaren Schaltung<br />
mit Stromspiegellast.<br />
V1<br />
M3<br />
ID1<br />
M1<br />
RSS<br />
VDD<br />
VSS<br />
ISS<br />
ID2<br />
M2<br />
M4<br />
I ≈ I<br />
D4 D1<br />
I ≈I −I<br />
Q D2 D1<br />
Abbildung 5.79: CMOS-Differenzverstärker<br />
Setzt man jeweils identische Transistorpaare M1, M2 und M3, M4 voraus gilt:<br />
VD<br />
VGS1 =− VGS<br />
2 =<br />
2<br />
und damit<br />
VD<br />
∆ID1 =− ∆ID2<br />
= gmN<br />
⋅<br />
2<br />
∆ Q = ∆I<br />
D2<br />
− ∆I<br />
D1<br />
I = −g<br />
⋅V<br />
mN<br />
Wie bei der bipolaren Schaltung ergibt sich näherungsweise<br />
AVD<br />
≈<br />
g<br />
gmN<br />
+ g<br />
DSN DSP<br />
D<br />
Unter Annahme der Symmetrie der Bauelemente verschwindet die Gleichtaktverstärkung,<br />
weil sich die Ausgangsspannung aus der Differenz der dann symmetrischen Drainströme ergibt.<br />
Tatsächlich ist jedoch die Symmetrie wegen der Elementtoleranzen nicht ideal, so daß<br />
Prof. Dr.-Ing. R. Laur - 151 -<br />
ITEM<br />
V2<br />
Q
Kapitel 5 Analoge Schaltungstechnik Integrierte Schaltungen II<br />
sich eine endliche Gleichtaktverstärkung und damit eine endliche Gleichtaktunterdrückung<br />
ergibt.<br />
Prof. Dr.-Ing. R. Laur - 152 -<br />
ITEM
Kapitel 5 Analoge Schaltungstechnik Integrierte Schaltungen II<br />
5.9 Operationsverstärker<br />
Operationsverstärker sind wichtige Komponenten integrierter Analogschaltungen. Sie liefern<br />
hinreichend hohe Verstärkungen. Durch Gegenkopplung können Funktionen der analogen<br />
Signalverarbeitung wie Verstärkung, Integration, Differentiation, Filterung, u.a. realisiert<br />
werden.<br />
Der ideale Operationsverstärker besitzt einen unendlich hohen Eingangswiderstand Rid, eine<br />
unendlich hohe Differenzverstärkung Ad und einen verschwindenden Ausgangswiderstand.<br />
Vi1 Vid +<br />
VO Vi2 -<br />
Abbildung 5.80: Idealer Operationsverstärker<br />
Für eine endliche Ausgangsspannung Vo muß daher gelten:<br />
Vid = Vi1− Vi2<br />
= 0<br />
Im realen Fall wird das nichtideale Verhalten u.a. durch folgende Parameter beschrieben:<br />
Rid, Cid differentieller Eingangswiderstand und -kapazität<br />
Ric, Cic Gleichtakt-Eingangswiderstand und -Eingangskapazität<br />
Vos Eingangs-Offsetspannung<br />
Ios Eingangs-Offsetstrom<br />
CMRR Gleichtaktunterdrückung<br />
Ad differentielle Spannungsverstärkung<br />
Ro Ausgangswiderstand<br />
5.9.1 Frequenzverhalten<br />
Ein typischer Operationsverstärker verhält sich wie ein Tiefpaß n-ter Ordnung, d.h. für die<br />
Differenzverstärkung gilt näherungsweise<br />
Ad() s =<br />
Aod<br />
⋅ω1⋅ω2⋅ω3⋅... + ⋅ + ⋅ + ⋅...<br />
( s ω ) ( s ω ) ( s ω )<br />
1 2 3<br />
Mit ω1 < ω2 < ω3<br />
ergibt sich für Betrag und Phase der Differenzverstärkung das Bode-<br />
Diagramm in Abbildung 5.81:<br />
Prof. Dr.-Ing. R. Laur - 153 -<br />
ITEM
Kapitel 5 Analoge Schaltungstechnik Integrierte Schaltungen II<br />
Ad/dB<br />
Aod<br />
0<br />
0<br />
-90°<br />
-180°<br />
-270°<br />
ω 1<br />
⎛ { } ⎞<br />
ϕ = arctan⎜ ⎟<br />
⎝ { } ⎠<br />
Im Ad<br />
Re Ad<br />
-20dB/Dekade<br />
ω T<br />
ω 2 ω 3<br />
Abbildung 5.81: Bode-Diagramm eines Operationsverstärkers<br />
ω<br />
-40dB/Dekade<br />
-60dB/Dekade<br />
Man beachte, daß im Bodediagramm die Phasendrehung um 180° im niederfrequenten Fall<br />
(invertierende Verstärkung) nicht berücksichtigt ist. Aod ist die niederfrequente Verstärkung,<br />
ist die Transitfrequenz mit der Definition:<br />
ω T<br />
d<br />
( ) 1<br />
!<br />
=<br />
A ω .<br />
T<br />
Unter der Voraussetzung ω < ω gilt:<br />
ω ⋅<br />
T = A od<br />
ω1<br />
T<br />
2<br />
ω 1 ist der niederfrequente, der sog. dominante Pol. Aus Stabilitätsgründen wird darauf geachtet,<br />
daß die weiteren Pole soweit oberhalb der Transitfrequenz liegen, daß die ″Phasenreserve″<br />
bei der Transitfrequenz noch mindestens 45° zu 180° beträgt:<br />
ϕω ( T ) >− 135°=− 180°+ 45 ° .<br />
Operationsverstärker werden in Gegenkopplung betrieben, d.h. ein Teil der Ausgangsspannung<br />
wird gegenphasig zur Eingangsspannung addiert, wie dies in Abbildung 5.82 dargestellt<br />
ist. Die Gegenphasigkeit wird dadurch erreicht, daß es sich bei Operationsverstärkern um<br />
invertierende Verstärker handelt. In Abbildung 5.82 wird dies durch Subtraktion des rückgeführten<br />
Ausgangssignals am Summationspunkt dargestellt.<br />
Prof. Dr.-Ing. R. Laur - 154 -<br />
ITEM<br />
ω
Kapitel 5 Analoge Schaltungstechnik Integrierte Schaltungen II<br />
v i<br />
+<br />
-<br />
v e<br />
ß v o<br />
A(s)<br />
ß<br />
ß
Kapitel 5 Analoge Schaltungstechnik Integrierte Schaltungen II<br />
Wegen der Frequenzkompensation liegt die Bandbreite des offenen Verstärkers in der Regel<br />
bei einigen 10 bis 100Hz. Für den gegengekoppelten Verstärker ergibt sich:<br />
A G<br />
A(<br />
s)<br />
= .<br />
1+<br />
β A(<br />
s)<br />
Man erkennt, daß bei hinreichend hoher Verstärkung des offenen Verstärkers, die Eigenschaften<br />
des gegengekoppelten Verstärkers nur noch durch den Gegenkopplungsfaktor β bestimmt<br />
wird.<br />
Aus<br />
mit<br />
A(<br />
s)<br />
A<br />
A<br />
A ω<br />
A<br />
o 1<br />
o<br />
≈ = folgt<br />
s + ω ω<br />
1<br />
A<br />
1+<br />
j<br />
ω<br />
1<br />
o<br />
oG<br />
G ≈ ⋅<br />
= ,<br />
1+<br />
β A ω<br />
ω<br />
o<br />
oG<br />
Ao<br />
=<br />
1+<br />
β A<br />
o<br />
1+<br />
j<br />
ω ( 1+<br />
β A )<br />
1<br />
1<br />
, = ( 1+<br />
β A ) ω ,<br />
ω1 G<br />
o<br />
ω A = ω .<br />
TG = oG ⋅ω1<br />
G = Ao<br />
⋅ω1<br />
T<br />
o<br />
1<br />
A<br />
1+<br />
j<br />
ω<br />
1G<br />
Die Transitfrequenz ändert sich demnach durch die Gegenkopplung nicht. Der entsprechende<br />
Amplitudengang ist in Abbildung 5.84 dargestellt.<br />
A/dB<br />
A 0<br />
A OG<br />
ω 1 ω 1G ω T<br />
Abbildung 5.84: Amplitudengang des rückgekoppelten Operationsverstärkers<br />
Durch die Gegenkopplung wird die Verstärkung reduziert:<br />
A<br />
A<br />
oG<br />
o<br />
1<br />
=<br />
1+<br />
β ⋅ A<br />
o<br />
.<br />
Die Bandbreite wird um den entsprechenden inversen Faktor vergrößert.<br />
A<br />
ω ( 1 A ) ⋅ω<br />
.<br />
o<br />
1 G = ⋅ω1<br />
= + β ⋅ o<br />
Aog<br />
1<br />
5.9.2 Großsignalverhalten<br />
Bei impulsförmiger Ansteuerung des Eingangs zeigt sich, daß der Anstieg der Ausgangsspannung<br />
begrenzt ist.<br />
Prof. Dr.-Ing. R. Laur - 156 -<br />
ITEM<br />
ω
Kapitel 5 Analoge Schaltungstechnik Integrierte Schaltungen II<br />
V i ,V o<br />
Abbildung 5.85: Großsignalverhalten<br />
V i<br />
Der maximale Anstieg der Ausgangsspannung wird als ″Slew Rate (SR)″ bezeichnet:<br />
dvo<br />
SR = max .<br />
dt<br />
Die Begrenzung des Anstiegs der Ausgangsspannung ist auf den Kompensationskondensator<br />
zurückzuführen und es besteht ein eindeutiger Zusammenhang zwischen Slew Rate und<br />
Grenzfrequenz.<br />
SR ~ ω 1 ~ ω .<br />
T<br />
Die Slew Rate wird in der Einheit V/µs gemessen. Sie liegt in der Regel in der Größenordnung<br />
1V/µs. Abbildung 5.86 zeigt den Zusammenhang zwischen der Slew Rate und der Frequenzkompensation. <br />
Differenzverstärker<br />
vI2<br />
CF<br />
T1<br />
Abbildung 5.86: Einfluß der Frequenzkompensation auf die Slew Rate<br />
Stufe 2 sei eine Darlington-Stufe in Emitterschaltung mit Stromquellenlast. Stufe 3 sei ein<br />
Emitterfolger mit einer Verstärkung von 1. Durch einen Spannungssprung am Eingang steigt<br />
die Ausgangsspannung. Die Eingangsspannung der Stufe 2 ( vi2 ) ändert sich wegen der hohen<br />
Verstärkung nur wenig. Die Kapazität C<br />
i<br />
CF<br />
duC<br />
dv<br />
F o<br />
≈ iQ<br />
= CF<br />
= CF<br />
,<br />
dt dt<br />
dv iQ<br />
= .<br />
dt C<br />
o SR =<br />
F<br />
V O<br />
T2<br />
VCC<br />
VSS<br />
IQ<br />
A2 ≈1<br />
F wird von IQ aufgeladen:<br />
Bei harmonischer Ansteuerung muß für ein unverzerrtes Ausgangssignal gelten:<br />
Prof. Dr.-Ing. R. Laur - 157 -<br />
ITEM<br />
t<br />
vo
Kapitel 5 Analoge Schaltungstechnik Integrierte Schaltungen II<br />
dvo<br />
( t)<br />
= V ⋅cosωt<br />
, = ω ⋅Vo<br />
< SR ,<br />
dt<br />
vo o<br />
SR<br />
ω < ω max = ,<br />
V<br />
o<br />
max<br />
1<br />
f max = ⋅<br />
2π<br />
SR<br />
Vo<br />
Beispiel: SR = 0 , 5V<br />
/ µ s,<br />
Vo<br />
= 5V<br />
,<br />
f<br />
max<br />
1 05 , V / µ s<br />
= ⋅ ≈16kHz<br />
.<br />
2π<br />
5V<br />
.<br />
fmax wird als ″Leistungsbandbreite″ bezeichnet und kann deutlich geringer als die Kleinsignalbandbreite<br />
sein.<br />
5.9.3 Einfache zweistufige CMOS-Operationsverstärker<br />
Die im folgenden gezeigten Operationsverstärker haben einen relativ hohen Ausgangswiderstand<br />
und können durch einen geeigneten Leistungsverstärker z.B. in Source-Folgerschaltung<br />
ergänzt werden. Eine entsprechende Lösung in bipolarer Schaltungstechnik ist möglich.<br />
M 8<br />
R Bias<br />
V 2<br />
M 1<br />
Abbildung 5.87: CMOS-Operationsverstärker<br />
V CC<br />
M 3 M 4 M 5<br />
M 7<br />
V SS<br />
A<br />
M 2<br />
Stufe 1 im Verstärker in Abbildung 5.87 ist ein Differenzverstärker mit den Transistoren M1<br />
und M2 , dessen Arbeitspunkt durch einen Stromspiegel bestehend aus M7, M8 eingestellt wird.<br />
Die Transistoren M3, M4 bilden eine aktive Stromspiegel-Last. Stufe 2 ist ein invertierender<br />
Verstärker in Source-Schaltung mit M6 als Stromquellen-Last. CC<br />
dient als Millerkapazität<br />
zur Frequenzkompensation und legt damit auch die Slew Rate fest.<br />
Für die Verstärkung der ersten Stufe gilt als Differenzverstärkerstufe:<br />
A<br />
g<br />
m2<br />
V1<br />
≈ .<br />
g DS 2 + g DS 4<br />
Prof. Dr.-Ing. R. Laur - 158 -<br />
ITEM<br />
V 1<br />
C C<br />
M 6<br />
V o
Kapitel 5 Analoge Schaltungstechnik Integrierte Schaltungen II<br />
Die Stufe 2 ist eine Source-Schaltung mit der Verstärkung:<br />
A<br />
V 2<br />
gm5<br />
≈−<br />
g + g<br />
DS 5 DS 6<br />
.<br />
g ⋅ g<br />
AV = AV1⋅AV2 ≈−<br />
( g g )( g g<br />
Im gesättigten Zustand gilt:<br />
g ≈λ⋅ I ,<br />
DS D<br />
Transistoren<br />
A<br />
V<br />
g<br />
m<br />
1 kp⋅kn W ⋅W<br />
≈− ⋅ ⋅<br />
2<br />
(2 λ)<br />
I ⋅ I L L<br />
m2 m5<br />
DS 2 + DS 4 DS 5 + DS 6) .<br />
2⋅β'⋅W ⋅ID<br />
≈ und damit bei näherungsweise identischem λ für die<br />
L<br />
2 5<br />
D2 D5<br />
2 5<br />
.<br />
Im Gegensatz zum bipolaren Äquivalent, kann die Verstärkung des CMOS-Verstärkers durch<br />
die Transistorabmessungen eingestellt werden.<br />
Der dominante Pol wird durch die Millerkapazität<br />
C ≈ C ⋅ A<br />
M<br />
C<br />
V 2<br />
festgelegt.<br />
Nachteilig bei dieser Schaltung ist, daß sowohl der Ausgangsknoten als auch der Knoten A<br />
hochimpedant sind. Wird der Ausgang kapazitiv, z.B. durch den Eingang eines Leistungsverstärkers<br />
belastet, wird der Pol des Ausgangsknotens niederfrequenter und der Pol des Knotens<br />
A verliert zunehmend seine Dominanz. Die Frequenzkompensation geht verloren.<br />
Dieser Nachteil wird durch die Kaskodenschaltung in der Ausgangsstufe des Verstärkers in<br />
Abbildung 5.88 vermieden. Der Transistor stellt einen Sourcefolger mit Verstärkung 1<br />
dar, der auf die Gate-Grundschaltung des Transistors wirkt. Die Spannungsverstärkung<br />
der Gate-Grundschaltung entspricht der einer Source-Grundschaltung, bei niedriger<br />
Eingangsimpedanz und hoher Ausgangsimpedanz. Der Knoten zwischen 6 M und M 6<br />
M 8<br />
M 8 ist<br />
demnach niederimpedant. Die Millerkapazität von M 6 ist wegen der geringen Verstärkung<br />
gering. Der Pol des Knotens zwischen M 6 und M 8 ist demnach nachrangig. Der<br />
Ausgangsknoten liefert den dominanten Pol und dient der Frequenzkompensation, die durch<br />
eine kapazitive Beschaltung des Ausgangsknotens zusätzlich verbessert<br />
wird.<br />
Prof. Dr.-Ing. R. Laur - 159 -<br />
ITEM
Kapitel 5 Analoge Schaltungstechnik Integrierte Schaltungen II<br />
M 12<br />
R Bias<br />
V 2<br />
Abbildung 5.88: Cascode CMOS-Operationsverstärker<br />
M 3<br />
M 1<br />
M 11<br />
V SS<br />
M 4<br />
V CC<br />
M 5<br />
M 2<br />
Prof. Dr.-Ing. R. Laur - 160 -<br />
ITEM<br />
V 1<br />
M 10<br />
V GG8<br />
V GG9<br />
M 6<br />
M 8<br />
M 9<br />
M 7<br />
V o
Kapitel 6: Digitale Schaltungstechnik Integrierte Schaltungen II<br />
Vorläufige unkorrigierte und unvollständige Version<br />
6 Digitale Grundschaltungen<br />
6.1 Eigenschaften von Invertern<br />
Die Inverterschaltung ist die Basisschaltung digitaler Schaltungen. Das Schaltsymbol ist in<br />
Abbildung 6.1dargestellt. Abbildung 6.2 zeigt die prinzipielle Übertragungskennlinie eines<br />
dv o<br />
Inverters. Die Punkte = −1<br />
dv<br />
oH oL V ,<br />
werden als kritische Punkte bezeichnet. Die kritischen<br />
Punkte werden durch die jeweiligen Eingangsspannungen V iL iH und durch die zugehörigen<br />
Ausgangsspannungen V gekennzeichnet. Die beiden Bereiche der Übertragungskennlinie<br />
mit<br />
V ,<br />
dvo<br />
< 1 repräsentieren stabile Zustände. Störungen am Eingang erscheinen gedämpft<br />
dv<br />
i<br />
dvo<br />
am Ausgang. Der Bereich > 1 wird lediglich beim Übergang zwischen den stabilen<br />
dvi<br />
Zuständen durchquert. In diesem Bereich ist die Verstärkung des Inverters sehr hoch, so daß<br />
Störungen am Eingang hochverstärkt am Ausgang erscheinen.<br />
Abbildung 6.1: Schaltsymbol eines Inverters<br />
V oH<br />
V oL<br />
v o<br />
v i vo<br />
V iL V iH<br />
dv o/dv i= -1<br />
Abbildung 6.2: Übertragungskennlinie eines Inverters<br />
Stabile Zustände:<br />
o<br />
oH<br />
Kritische Punkte<br />
V v ≥ für : Z V v ≤ o = H oder 1 für Zi = L oder 0<br />
o<br />
OL<br />
i<br />
iL<br />
V v ≤ für : Z V v ≥ o = L oder 0 für Zi = H oder 1<br />
i<br />
iH<br />
Prof. Dr.-Ing. R. Laur - 160 -<br />
ITEM<br />
v i
Kapitel 6: Digitale Schaltungstechnik Integrierte Schaltungen II<br />
v i<br />
H,1<br />
<br />
<br />
L,0<br />
<br />
V iH<br />
V iL<br />
Übergangsbereich<br />
v o<br />
<br />
V oH<br />
<br />
<br />
L,0<br />
Eingang Ausgang<br />
Übergangsbereich<br />
Abbildung 6.3: Signalpegel und Zustände des Inverters<br />
H,1<br />
V oL<br />
höchster Signalpegel<br />
Signalhub<br />
niedrigster Signalpegel<br />
Abbildung 6.4 zeigt eine Kette von Invertern. Damit die Zustände der Inverterkette stabil<br />
sind, wird gefordert:<br />
VoH > ViH , VoL < ViL .<br />
v i < V iL v o > V oH v o < V oL<br />
v o = v i > V iH<br />
V oH > V iH<br />
Abbildung 6.4: Inverterkette mit stabilen Zuständen<br />
vo = vi < ViL VoL < ViL Die maximal zulässigen statischen Störpegel, die auf den Verbindungsleitungen eingekoppelt<br />
werden dürfen, ohne daß sich der Zustand der Kette ändert, werden als statische Störsicherheiten<br />
(Noise Margins NM) bezeichnet:<br />
NMH = VoH - ViH , NML = ViL - VoL.<br />
Abbildung 6.5 bis Abbildung 6.7 zeigen prinzipielle Realisierungen von Invertern mit Schaltern.<br />
Dabei ist mit SR ein Ruhekontakt und mit SA ein Arbeitskontakt bezeichnet. In Abbildung<br />
6.5 wird eine passive Last mit einem Arbeitskontakt ein- und ausgeschaltet. Dieses Prinzip<br />
wird von den inzwischen veralteten NMOS-, PMOS-, RTL- (Resistor-Transistor-Logic) und<br />
DTL- (Diode-Transistor-Logic) Schaltkreisfamilien verwendet. Abbildung 6.6 zeigt das Prinzip<br />
der Spannungsumschaltung mit zwei komplementär wirkenden Schaltern der digitalen<br />
CMOS-Schaltungen. Das Prinzip der Stromumschaltung in Abbildung 6.7 wird bei ECL-<br />
Schaltungen (Emitter-Coupled-Logic) verwendet.<br />
Prof. Dr.-Ing. R. Laur - 161 -<br />
ITEM
Kapitel 6: Digitale Schaltungstechnik Integrierte Schaltungen II<br />
V i<br />
V DD<br />
Last<br />
Abbildung 6.5: Aufbau eines Inverters mit passiver Last.<br />
V i<br />
S A<br />
V DD<br />
Abbildung 6.6: Inverter mit Spannungs-Umschaltern<br />
Abbildung 6.7: Inverter mit Strom-Umschaltern<br />
V o1<br />
V i1<br />
R L1<br />
S A<br />
V +<br />
V -<br />
Prof. Dr.-Ing. R. Laur - 162 -<br />
ITEM<br />
I O<br />
S R<br />
S A<br />
R L2<br />
S R<br />
V o<br />
V o<br />
V o2
Kapitel 6: Digitale Schaltungstechnik Integrierte Schaltungen II<br />
Zur Untersuchung des dynamischen Verhaltens von Invertern, wird eine Kette von Invertern<br />
betrachtet. Abbildung 6.8 zeigt jeweils das Eingangssignal und das Ausgangssignal eines Inverters<br />
in dieser Kette. Man erkennt eine Zeitverzögerung der Flanken von Ein- und Ausgangssignal.<br />
Die Verzögerungszeiten der Flanken beziehen sich jeweils auf die Zeitpunkte,<br />
bei denen Ein- und Ausgangssignal jeweils 50% des Signalhubs erreichen. Die Verzögerungszeit<br />
der abfallenden Flanke wird mit t bezeichnet. Entsprechend wird die Verzöge-<br />
rungszeit der ansteigenden Flanke mit t bezeichnet. Als Verzögerungszeit zwischen Aus-<br />
pLH<br />
und Eingangssignal wird der Mittelwert der Flankenverzögerungszeiten definiert:<br />
t<br />
p<br />
t pHL + t pLH<br />
= .<br />
2<br />
v i<br />
v o<br />
50%<br />
t PHL<br />
50%<br />
T<br />
pHL<br />
t PLH<br />
Abbildung 6.8: Dynamisches Verhalten von Invertern<br />
Abbildung 6.9 zeigt die Definitionen der Anstiegs- und Abfallzeiten t LH bzw. tHL. Diese werden<br />
zwischen den Zeitpunkten mit 10% bzw. 90% des Signalhubs gemessen.<br />
90%<br />
50%<br />
10%<br />
Abbildung 6.9: Anstiegs- und Abfallzeiten<br />
V H<br />
V L<br />
tHL<br />
Das dynamische Verhalten von Invertern ist auf das Laden und Entladen von Kapazitäten zurückzuführen,<br />
die mit den Signalknoten verknüpft sind. Dies führt zu einem exponentielles<br />
Zeitverhalten. Die Pegel VH und VL werden nur asymptotisch erreicht. Abbildung 6.10 zeigt<br />
Prof. Dr.-Ing. R. Laur - 163 -<br />
ITEM<br />
T<br />
tLH<br />
t<br />
t<br />
t
Kapitel 6: Digitale Schaltungstechnik Integrierte Schaltungen II<br />
beispielhaft an einem Schaltermodell eines Inverters mit Widerstandslast die Bestimmung der<br />
dynamischen Parameter. C L beschreibt die Kapazität des Signalknotens, die sich aus parasitären<br />
Kapazitäten wie Sperrschicht-, Gate-, Leitungskapazitäten, u.a. ergibt. RL<br />
bezeichnet den<br />
Lastwiderstand und R
Kapitel 6: Digitale Schaltungstechnik Integrierte Schaltungen II<br />
t = t = 0.<br />
69⋅τ<br />
pHL<br />
50 %<br />
HL<br />
.<br />
1<br />
⎛ R ⎞ S<br />
Verzögerungszeit: t p = ⋅(<br />
tPHL + tPLH<br />
) ≈ 0.<br />
35⋅<br />
⎜<br />
⎜1+<br />
⋅ RL<br />
⋅C<br />
L<br />
RL<br />
R ⎟<br />
2<br />
⎝ + S ⎠<br />
Die mittlere Verlustleistung des Inverters ergibt sich aus der mittleren stationären Verlustleistung<br />
und der elektrischen Energie, die pro Signalperiode am Lastkondensator umgesetzt<br />
wird. Im H-Zustand verschwindet die stationäre Leistung:<br />
P VH = VDD<br />
⋅ I H ≈ 0 .<br />
Im L-Zustand ergibt sich<br />
P<br />
VL<br />
L<br />
2<br />
DD<br />
S<br />
2<br />
DD<br />
V V<br />
= VDD<br />
⋅ I L ≈ ≈ .<br />
R + R R<br />
Im Mittel ergibt sich als stationäre Verlustleistung:<br />
P<br />
Vs<br />
2<br />
DD<br />
1 V<br />
≈ .<br />
2 R<br />
L<br />
L<br />
In jeder Periode wird die Lastkapazität CL um die Spannungsdifferenz ∆Vo = VH - VL auf- bzw.<br />
entladen. Dafür wird der Betriebsspannungsquelle die Energie<br />
C<br />
DD<br />
DD<br />
L<br />
2<br />
( V −V<br />
) ≈ C V<br />
W = V ⋅∆Q<br />
= V ⋅C<br />
⋅<br />
⋅ .<br />
H<br />
L<br />
L<br />
entnommen. Bei einer Periodendauer T = 1/f ergibt sich die dynamische Verlustleistung zu<br />
W<br />
2<br />
= VDD<br />
.<br />
T<br />
C PVd = f ⋅WC<br />
≈ f ⋅C<br />
L ⋅<br />
Die gesamte Verlustleistung ergibt sich aus der Addition der stationären und dynamischen<br />
Verlustleistung:<br />
2<br />
DD<br />
1 V<br />
2<br />
PV = PVs<br />
+ PVd<br />
≈ + f ⋅C<br />
L ⋅VDD<br />
.<br />
2 R<br />
L<br />
Bei Schaltkreisfamilien, bei denen die stationäre Verlustleistung vernachlässigbar gegenüber<br />
der dynamischen Verlustleistung ist, ist die Verlustleistung proportional zur Taktfrequenz und<br />
zum Quadrat der Betriebsspannung. Dies trifft näherungsweise bei CMOS-Schaltungen zu.<br />
Das Power-Delay-Product (PDP) ist ein Kennwert zur Charakterisierung des dynamischen<br />
Verhaltens von Schaltkreisfamilien:<br />
Definition:<br />
PDP = PV ⋅tp<br />
Das Power-Delay-Product kann demnach als die mittlere Energie aufgefaßt werden, die pro<br />
logischer Entscheidung benötigt wird. Für moderne Schaltkreisfamilien gilt:<br />
PDP = 0.<br />
1..<br />
10 pJ<br />
Prof. Dr.-Ing. R. Laur - 165 -<br />
ITEM<br />
DD
Kapitel 6: Digitale Schaltungstechnik Integrierte Schaltungen II<br />
Für das obige Beispiel des Schaltermodells folgt:<br />
2<br />
⎛ R ⎞ ⎡<br />
⎤<br />
S<br />
1 VDD<br />
PDP = t<br />
⎜<br />
⎟<br />
p ⋅ PV<br />
= 0. 35⋅<br />
1+<br />
⋅ RL<br />
⋅C<br />
L ⋅ ⎢ ⋅ + f ⋅C<br />
L ⋅<br />
L ,<br />
⎝ RS<br />
+ RL<br />
⎠ ⎣2<br />
RS<br />
+ RL<br />
2<br />
⎛ R ⎞ ⎡ S 1 VDD<br />
2 ⎤<br />
PDP ≈0.35⋅ ⎜1+ ⎟⋅RL⋅CL⋅⎢<br />
⋅ + f ⋅CL⋅VDD ⎥,<br />
⎝ RS + RL ⎠ ⎣2RL ⎦<br />
6.2 Der MOS-Inverter<br />
6.2.1 Der NMOS-Inverter<br />
2 ( VH<br />
−V<br />
) ⎥<br />
⎦<br />
Beim NMOS Inverter wird ein NMOS-Anreicherungstransistor als Schaltertransistor verwendet.<br />
Wegen des hohen Flächenaufwands ist eine Widerstandslast technisch uninteressant.<br />
Abbildung 6.11 zeigt einen NMOS-Inverter mit einem Enhancementtransistor als Last. Im H-<br />
Zustand fällt am Lasttransistor die Schwellenspannung ab:<br />
V ≤ V −V<br />
oH<br />
DD<br />
T<br />
.<br />
Aus diesem Grund ist der Inverter mit Enhancementlast ohne technische Bedeutung.<br />
V i<br />
V DD<br />
Abbildung 6.11: NMOS-Inverter mit Enhancementlast<br />
Eine wesentliche Bedeutung hatte bis vor einigen Jahren die NMOS-Schaltung mit Depletionlast<br />
entsprechend Abbildung 6.12, wegen der einfachen Technologie. Erste hochintegrierte<br />
Digitalschaltungen, z.B. die ersten Mikroprozessoren wie µP 8080, 8085 waren in dieser<br />
Schaltungstechnik realisiert. Im H-Zustand tritt kein Spannungsabfall am Lasttransistor auf<br />
(V oH DD ). Nachteilig ist allerdings die hohe stationäre Verlustleistung im L-Zustand, aufgrund<br />
des Querstroms. NMOS ist heute nahezu vollständig durch CMOS abgelöst.<br />
V ≈<br />
Prof. Dr.-Ing. R. Laur - 166 -<br />
ITEM<br />
M NL<br />
M N<br />
V o
Kapitel 6: Digitale Schaltungstechnik Integrierte Schaltungen II<br />
Abbildung 6.12: NMOS-Inverter mit Depletionlast<br />
Vi<br />
ID<br />
VDD<br />
6.2.2 Der CMOS-Inverter (Complementary MOS)<br />
Abbildung 6.13 zeigt das Schaltbild eines CMOS-Inverters. Im stationären Zustand ist jeweils<br />
einer der beiden Transistoren gesperrt. Es fließt kein Querstrom und die stationäre Verlustleistung<br />
wird lediglich durch Sperrströme bestimmt. Der Inverter kann so dimensioniert werden,<br />
daß die Übertragungscharakteristik symmetrisch ist. Es ergeben sich damit günstige statische<br />
Störabstände. Nachteilig ist lediglich die gegenüber NMOS komplexere Technologie. Es ist<br />
zumindest eine Wannendiffusion zur Realisierung der komplementären Transistoren erforderlich.<br />
Die überragenden Vorteile von CMOS haben jedoch die NMOS-Technologie nahezu<br />
vollständig verdrängt.<br />
Abbildung 6.13: CMOS-Inverter<br />
VI<br />
VDD<br />
Vo<br />
|IDP| = IDN<br />
Prof. Dr.-Ing. R. Laur - 167 -<br />
ITEM<br />
VO
Kapitel 6: Digitale Schaltungstechnik Integrierte Schaltungen II<br />
Wegen der höheren Beweglichkeit der Elektronen, verhält sich der Inverter unsymmetrisch,<br />
wenn der Inverter mit gleichen Gateabmessungen für beide Transistoren dimensioniert wird.<br />
Ein symmetrisches Verhalten erfordert eine Dimensionierung mit<br />
p<br />
⎛W<br />
⎞<br />
⎜ ⎟<br />
⎝ L ⎠<br />
n<br />
⎛W<br />
⎞<br />
≈ 2 .. 3⋅<br />
⎜ ⎟ ,<br />
⎝ L ⎠<br />
da die Beweglichkeit der Löcher um etwa den Faktor 3 kleiner als die der Elektronen ist. Dabei<br />
ist die P-Wannentechnologie hinsichtlich des Flächenverhältnisses etwas günstiger.<br />
In<br />
V DD<br />
Gnd<br />
Poly<br />
Abbildung 6.14: Layout eines CMOS-Inverters<br />
p +<br />
p +<br />
n +<br />
n +<br />
PMOS<br />
Metal Out<br />
NMOS<br />
In Abbildung 6.14 ist das Layout eines CMOS-Inverters dargestellt. Die Kanallänge beider<br />
Transistoren ist dabei identisch, während die Kanalweite beim PMOS-Transistor deutlich größer<br />
als diejenige des NMOS-Transistors ist.<br />
6.2.3 Stationäres Verhalten des CMOS-Inverters<br />
Die Zustände beider Transistoren ergeben sich wie folgt:<br />
NMOS-Transistor:<br />
gesperrt: Vi < VTN ,<br />
Triodenverhalten: Vo Vi - VTN .<br />
gesperrt: VGSP = Vi - VDD > VTP , Vi > VDD - |VTP|, Triodenverhalten: VDSP = Vo - VDD > VGSP - VTP = Vi - VDD -VTP, Vo > Vi + |VTP|.<br />
Prof. Dr.-Ing. R. Laur - 168 -<br />
ITEM
Kapitel 6: Digitale Schaltungstechnik Integrierte Schaltungen II<br />
gesättigt: Vo < Vi + |VTP|.<br />
Vi<br />
VGSP<br />
VGSN<br />
Abbildung 6.15: CMOS-Inverter<br />
Abbildung 6.16 zeigt qualitativ das Übertragungsverhalten des CMOS-Inverters.<br />
V o<br />
V DD<br />
V oH<br />
V oL<br />
A<br />
NMOS gesperrt<br />
V TN<br />
B<br />
PMOS im Triodengebiet<br />
V o = V i + |V TP |<br />
V o = V i - V TN<br />
dVo<br />
=−1<br />
dV<br />
V iL<br />
i<br />
VDD<br />
C<br />
D<br />
IQ<br />
MP<br />
MN<br />
VDSP<br />
VDSN<br />
Vo<br />
NMOS im Triodengebiet<br />
V iH<br />
dVo<br />
dVi<br />
=−1<br />
PMOS gesperrt<br />
E<br />
V DD-V TP<br />
Abbildung 6.16: Übertragungsverhalten eines CMOS-Inverters<br />
Prof. Dr.-Ing. R. Laur - 169 -<br />
ITEM<br />
V DD<br />
V i
Kapitel 6: Digitale Schaltungstechnik Integrierte Schaltungen II<br />
Gebiet A: NMOS ist gesperrt , PMOS im Triodengebiet:<br />
Vo = VDD , IQ = IDN = |IDP| = 0.<br />
Gebiet B: NMOS ist gesättigt, PMOS im Triodengebiet (vgl. Abbildung 6.17):<br />
I DN<br />
|I DP|<br />
NMOS<br />
Abbildung 6.17: CMOS-Inverter in Fall B<br />
1<br />
2<br />
IDN ≈ ⋅βN⋅( Vi−V<br />
TN ) ,<br />
2<br />
⎡<br />
IDP ≈ βP<br />
⋅⎢( VDD −Vi− VTP ) ⋅( VDD −Vo) −<br />
⎣<br />
⎢<br />
V i<br />
V i<br />
V i<br />
( V −V<br />
)<br />
DD o<br />
Die Forderung IDP = IDN<br />
ergibt die quadratische Gleichung<br />
P<br />
2<br />
2<br />
PMOS<br />
V o V DD<br />
β N<br />
2 2<br />
⋅( Vi − VTN) = 2⋅(<br />
VDD −Vi −VTP ) ⋅( VDD −Vo) −( VDD − Vo)<br />
.<br />
β<br />
Deren Lösung für V lautet:<br />
o<br />
2 β<br />
2<br />
V V = V + V + V −V −V − ⋅ V − V .<br />
N<br />
( ) ( ) ( )<br />
o i i TP DD i TP i TN<br />
β P<br />
Bestimmung des charakteristischen Punktes dV<br />
dV<br />
dV<br />
dV<br />
o<br />
i<br />
= 1−<br />
N<br />
( V −V<br />
− V ) + ⋅(<br />
V −V<br />
)<br />
DD<br />
o<br />
i<br />
=−1:<br />
2 N<br />
( V −V<br />
− V ) − ⋅(<br />
V −V<br />
)<br />
DD<br />
iL<br />
iL<br />
TP<br />
TP<br />
β<br />
β<br />
P<br />
β<br />
β<br />
Nach etwas aufwendiger Rechnung folgt:<br />
V −V −V<br />
ViL = VTN<br />
+<br />
βN<br />
−1<br />
β<br />
( )<br />
V = V V .<br />
oH o iL<br />
DD TP TN<br />
P<br />
⎡<br />
⎢<br />
⋅⎢2⋅ ⎢<br />
⎢<br />
⎣<br />
P<br />
iL<br />
iL<br />
TN<br />
TN<br />
2<br />
β ⎤ N<br />
⎥<br />
βP<br />
−1,<br />
⎥<br />
βN<br />
⎥<br />
+ 3<br />
β ⎥<br />
P ⎦<br />
!<br />
= −1.<br />
Prof. Dr.-Ing. R. Laur - 170 -<br />
ITEM<br />
⎤<br />
⎥ .<br />
⎦<br />
⎥<br />
V o
Kapitel 6: Digitale Schaltungstechnik Integrierte Schaltungen II<br />
Gebiet C: Beide Transistoren sind gesättigt:<br />
Für den Strom in den Transistoren gilt:<br />
IDN = IDP<br />
.<br />
β 2<br />
N 2<br />
βP<br />
⋅( Vi −VTN) ⋅ ( 1+ λN ⋅Vo) ≈ ⋅( VDD −Vi − VTP ) ⎡1+ λP⋅(<br />
VDD −Vo)<br />
⎤<br />
2 2<br />
⎣ ⎦<br />
Anhand Abbildung 6.18 erkennt man, dass Vo( V i)<br />
wegen des geringen Ausgangsleitwerts<br />
sehr steil verläuft. Für λ → 0 wird die Steigung unendlich und die Gleichung<br />
βPβ ⋅ − = ⋅ − −<br />
2 2<br />
2 P<br />
( Vi VTN) ( VDD ViVTP) ist für die Schwellenspannung Vi iS V = erfüllt:<br />
V<br />
iS<br />
=<br />
β N ⋅V<br />
β<br />
P<br />
TN<br />
1 +<br />
+ V<br />
DD<br />
β N<br />
β<br />
P<br />
− V<br />
TP<br />
.<br />
I DN<br />
|I DP|<br />
Abbildung 6.18: CMOS-Inverter in Fall C<br />
Für den Querstrom folgt:<br />
β N<br />
IQ = I DN ≈ iS −<br />
2<br />
( ) 2<br />
V V<br />
Aus Symmetriegründen wird in der Regel ( )<br />
TN<br />
.<br />
2<br />
V i<br />
V o<br />
V i<br />
V i<br />
V o<br />
1<br />
Vo V iS ≈ VDD<br />
angestrebt.<br />
2<br />
Gebiet D: NMOS im Triodengebiet, PMOS ist gesättigt (vgl. Abbildung 6.19):<br />
⎡<br />
β N ⎢<br />
⎣<br />
liefert die Lösung<br />
β<br />
2<br />
( ) ( ) 2<br />
o P<br />
V −V<br />
V − = ⋅ V −V<br />
− V<br />
i<br />
TN<br />
o<br />
2<br />
V ⎤<br />
⎥<br />
2 ⎦<br />
DD<br />
i<br />
Prof. Dr.-Ing. R. Laur - 171 -<br />
ITEM<br />
TP
Kapitel 6: Digitale Schaltungstechnik Integrierte Schaltungen II<br />
β<br />
Vo i i TN i TN<br />
DD i −<br />
β<br />
( ) ( ) ( ) 2<br />
2 P<br />
V = V −V<br />
− V −V<br />
− ⋅ V −V<br />
V<br />
I DN<br />
|I DP|<br />
Abbildung 6.19: CMOS-Inverter in Fall D<br />
Der kritische Punkt ergibt sich mit<br />
zu<br />
dV<br />
dV<br />
o<br />
i<br />
= 1−<br />
V<br />
iH<br />
−V<br />
β P<br />
+<br />
β<br />
V o<br />
⋅<br />
V i<br />
N<br />
V i<br />
( V −V<br />
− V )<br />
2 P<br />
( V −V<br />
) − ⋅(<br />
V −V<br />
− V )<br />
iH<br />
TN<br />
TN<br />
⎡ β ⎤<br />
P<br />
VDD−VTP −V<br />
⎢ ⎥<br />
TN β N<br />
ViH = VDD −VTP− ⋅⎢2 −1⎥<br />
βP ⎢ βP<br />
⎥<br />
− 1 3<br />
β ⎢<br />
+<br />
N β ⎥<br />
⎣ N ⎦<br />
( )<br />
V = V V<br />
Querstrom:<br />
oL o iH<br />
N<br />
β<br />
β<br />
βP<br />
IQ = IDP = ⋅ V −V − V<br />
2<br />
N<br />
DD<br />
( DD i TP )<br />
Gebiet E: PMOS ist gesperrt:<br />
Vo = 0 ; IQ = IDN = |IDP| = 0<br />
DD<br />
2<br />
iH<br />
iH<br />
TP<br />
TP<br />
2<br />
TP<br />
.<br />
= −1<br />
Beispiel: Übertragungsverhaltens eines CMOS-Inverters (1.2µm CMOS-Prozess)<br />
Prof. Dr.-Ing. R. Laur - 172 -<br />
ITEM<br />
V o
Kapitel 6: Digitale Schaltungstechnik Integrierte Schaltungen II<br />
V<br />
TN<br />
= 0.<br />
75V<br />
,<br />
V<br />
TP<br />
= −0.<br />
75V<br />
µ A<br />
kN<br />
= 75 , 2<br />
V<br />
µ A<br />
kP<br />
= 27 2<br />
V<br />
1 −1<br />
λP<br />
≈ λN<br />
≈ V<br />
50<br />
⎛W<br />
⎞<br />
⎜ ⎟<br />
⎝ L ⎠N<br />
2<br />
= ,<br />
2<br />
⎛W<br />
⎞<br />
⎜ ⎟<br />
⎝ L ⎠P<br />
75<br />
=<br />
27<br />
µ A<br />
β N = 75 , 2<br />
V<br />
β P = β N<br />
Gebiet B: ViL = 2.063V ; VoH = Vo(ViL) = 4.563V<br />
( ) 2 2<br />
I = I = 37.5µ A⋅ V − 0.75 V / V<br />
Q DN i<br />
Gebiet C: ViS = 0.5VDD=2.5V ; Vo(ViS) = 2.5V<br />
dVo<br />
2<br />
=−<br />
dVi ⎛V<br />
V<br />
DD<br />
iS λ ⋅⎜−V ⎝ 2<br />
TN<br />
=−571<br />
.<br />
⎞<br />
⎟<br />
⎠<br />
Gebiet D: ViH = 2.94V ; VoL = 0.44V<br />
( ) 2 2<br />
I = I = 37.5µ A⋅ 4.25 V − V / V<br />
Q DP i<br />
IQmax = IQ( V iS)<br />
= 114,8µ<br />
A<br />
Vo/V<br />
5<br />
V oH<br />
V oL<br />
ViL ViS V iH<br />
β N<br />
β P<br />
V DD-V TP<br />
Abbildung 6.20: Übertragungscharakteristik des Beispiels<br />
Abbildung 6.20 zeigt die Übertragungscharakteristik für das Beispiel. Durch Veränderung des<br />
Weiten-Längenverhältnisses von N- und PMOS-Transistoren verändert sich die Schwellenspannung,<br />
wie in der Abbildung symbolisiert. Für das Beispiel ergibt sich:<br />
V<br />
iS<br />
β N<br />
β N<br />
( = 3)<br />
= 2.<br />
03V<br />
, V iS ( = 0.<br />
333)<br />
= 2.<br />
97V<br />
β<br />
β<br />
P<br />
P<br />
Prof. Dr.-Ing. R. Laur - 173 -<br />
ITEM<br />
5<br />
Vi/V
Kapitel 6: Digitale Schaltungstechnik Integrierte Schaltungen II<br />
Für die Störabstände ergibt sich bei symmetrischen Transistoren:<br />
NM H = VoH − ViH = 4. 56V − 2. 94V = 162 . V<br />
NM = V − V = 2. 06V − 0. 44V = 162 . V<br />
L iL oL<br />
I D / µA<br />
100<br />
50<br />
10<br />
1 5<br />
Abbildung 6.21: Drainstrom des CMOS-Inverters<br />
Ein symmetrisches stationäres Verhalten des Inverters erfordert β N = β P . Wegen<br />
⎛W<br />
⎞ ⎛W<br />
⎞<br />
k N ≈ 2.<br />
5...<br />
3⋅<br />
kP<br />
wird dies für ⎜ ⎟ ≈ 2 . 5...<br />
3⋅<br />
⎜ ⎟ erreicht. Wird der NMOS-Transistor als<br />
⎝ L ⎠ P ⎝ L ⎠ N<br />
⎛W<br />
⎞ 2λ<br />
⎛W<br />
⎞ 5λ<br />
Minimaltransistor mit ⎜ ⎟ = realisiert, erfordert dies die Abmessung ⎜ ⎟ ≈ für<br />
⎝ L ⎠min<br />
2λ<br />
⎝ L ⎠ P 2λ<br />
den PMOS-Transistor. Der Flächenbedarf eines symmetrischen Inverters beträgt damit im<br />
Minimalfall:<br />
2 2 2<br />
A Inv = AN<br />
+ AP<br />
= 4λ + 10λ<br />
= 14λ<br />
.<br />
Vi/V<br />
λ ist dabei die minimale Strukturauflösung der verwendeten Technologie.<br />
Prof. Dr.-Ing. R. Laur - 174 -<br />
ITEM
Kapitel 6: Digitale Schaltungstechnik Integrierte Schaltungen II<br />
6.2.4 Dynamisches Verhalten des CMOS-Inverters<br />
Zur näherungsweisen Berechnung des dynamischen Verhaltens des CMOS-Inverters wird die<br />
in Abbildung 6.22 dargestellte Ersatzschaltung verwendet. Die Ersatzkapazität CT faßt interne<br />
Gatterkapazitäten, Leitungskapazitäten, Verdrahtungskapazitäten und Kapazitäten am Eingangsknoten<br />
des Folgegatters zusammen. Diese Ersatzkapazität wird von den Transistoren<br />
des CMOS-Gatters auf bzw. entladen, wobei am Eingang ein idealer Impuls vorausgesetzt<br />
wird.<br />
V i<br />
PMOS<br />
NMOS<br />
Abbildung 6.22: Ersatzschaltung zur Berechnung der Verzögerungszeiten eines CMOS Inverters<br />
V i<br />
C GDP1<br />
C GDN1<br />
V DD<br />
C JP<br />
C JN<br />
V o1<br />
V DD<br />
Abbildung 6.23: Inverterkette mit Gatterkapazitäten<br />
C L<br />
C T<br />
V o<br />
C GSP<br />
C GDP2<br />
C GDN2<br />
C GSN<br />
Prof. Dr.-Ing. R. Laur - 175 -<br />
ITEM<br />
V DD<br />
V o2
Kapitel 6: Digitale Schaltungstechnik Integrierte Schaltungen II<br />
Zur Bestimmung der Ersatzkapazität werden die Gatterkapazitäten in Abbildung 6.23 betrachtet.<br />
CL<br />
stellt die Leitungskapazität dar. Die weiteren Kapazitäten sind Gate- und Substratkapazitäten.<br />
Kapazitäten die mit Ein- und Ausgangsknoten verknüpft sind (CGDP, CGDN) werden um 2VDD umgeladen.<br />
Bezüglich des Signalknotens wirken sie mit dem doppelten Kapazitätswert und werden<br />
daher doppelt berücksichtigt. Die Ersatzkapazität CT setzt sich demnach wie folgt zusammen:<br />
CT = 4 CGDP +4 CGDN + CJP + CJN + CL + CGSP + CGSN<br />
Die Ersatzkapazität teilt sich auf Ein- und Ausgang der aufeinanderfolgenden Inverter und die<br />
Leitungskapazität auf. Manchmal ist es sinnvoll, diese Aufteilung vorzunehmen:<br />
CT = Ci + Co + CL mit Ci = 2 CGDN +2 CGDP + CGSP + CGSN ≈ 1.5 COxN +1.5 COxP<br />
Bei Vernachlässigung von CJ folgt<br />
CT ≈ 2.5 COxN + 2.5 COxP + CL<br />
und Co = 2 CGDP +2 CGDN + CJP + CJN ≈ COxN + COxP + CJP + CJN.<br />
Die Sperrschichtkapazitäten CJP und CJN sind spannungsabhängig. Hierfür wird die Näherung<br />
C<br />
J<br />
⎛ V<br />
≈ CJ<br />
⎜ 0 ⋅ 1+<br />
⎝ V<br />
R<br />
J<br />
⎞<br />
⎟<br />
⎠<br />
−m<br />
oder ein Mittelwert angesetzt.<br />
Die Gate-Kapazität ist ebenfalls spannungsabhängig. Näherungsweise gilt:<br />
Gesperrt: CGB = CG , CGS = COV , CGD = COV,<br />
Triodengebiet: CGB = 0 , CGS = 1 2 CG , C GD = 1 2 CG,<br />
Sättigung: C GB = COV , CGS = 2 3 CG , CGD = COV<br />
mit C<br />
G<br />
εOX<br />
= ⋅W⋅L d<br />
OX<br />
Zur Abschätzung des Zeitverhaltens wird von einem idealen LH- bzw. HL-Übergang am Eingang<br />
ausgegangen. Exakte Ergebnisse liefert eine Simulation mit einem Schaltungssimulator<br />
(z.B. SPICE). Die Abschätzung weicht in der Regel um einen Faktor, der geringer als zwei<br />
ist, vom exakten Ergebnis ab.<br />
Fallende Flanke am Ausgang:<br />
Für t > 0 ist der PMOS-Transistor gesperrt. Der NMOS-Transistor ist leitfähig und entlädt<br />
die auf V DD geladene Ersatzkapazität. Wegen vo(t<br />
= 0) =V DSN = V DD ist der NMOS<br />
Transistor in Sättigung, solange gilt:<br />
v ≥ V −V<br />
.<br />
o<br />
DD<br />
TN<br />
Bereich A: v ≥ V −V<br />
, NMOS in Sättigung<br />
o<br />
DD<br />
TN<br />
1<br />
I DN I Nsat = N ⋅ DD −<br />
2<br />
( ) 2<br />
V V<br />
= β TN ,<br />
Prof. Dr.-Ing. R. Laur - 176 -<br />
ITEM
Kapitel 6: Digitale Schaltungstechnik Integrierte Schaltungen II<br />
dvo I N =−<br />
dt C<br />
sat ,<br />
T<br />
v ( 0)<br />
= V ,<br />
o<br />
INsat INsat t<br />
vo() t = VDD − ⋅ t = VDD −VDD ⋅ t = VDD⋅(1<br />
− )<br />
C V ⋅C τ N<br />
DD<br />
T DD T<br />
Der Bereich der Sättigung wird nach der Zeit t A verlassen:<br />
V<br />
t = ⋅τ<br />
.<br />
TN<br />
A<br />
VDD<br />
N<br />
Bereich B: v < V −V<br />
= V , NMOS im Triodengebiet<br />
o<br />
DD<br />
TN<br />
Nsat<br />
2<br />
⎡<br />
v ⎤ I I<br />
iDN = β N ⋅ ⎢ DD TN o ⎥<br />
o ⋅ 2<br />
⎣<br />
2 ⎦ VNsat<br />
VNsat<br />
dv<br />
dt<br />
dv<br />
dt<br />
o<br />
Nsat<br />
Nsat 2<br />
( V −V<br />
) ⋅v<br />
− = 2⋅<br />
⋅v<br />
− v<br />
1 ⎡ I<br />
= − ⋅ ⎢2⋅<br />
CT<br />
⎣ V<br />
I<br />
−<br />
V<br />
o Nsat ⋅vo<br />
Nsat 2<br />
⋅v<br />
2 o<br />
Nsat<br />
Nsat<br />
⎤<br />
⎥ , v ( t ) = V −V<br />
⎦<br />
o A DD TN<br />
1 1 2<br />
VNsat<br />
VNsat<br />
= − ⋅[<br />
2⋅<br />
vo<br />
− ⋅ o ] , mit τ N ' = ⋅CT<br />
= ⋅τ<br />
N<br />
τ ' V<br />
I V<br />
o v<br />
N<br />
Nsat<br />
Die Lösung der Differentialgleichung mit Anfangsbedingung lautet:<br />
⎛−2( ⋅ t−t ) ⎞ A<br />
2exp ⋅ ⎜ ⎟<br />
τ N '<br />
vo() t = ( VDD −VTN) ⋅<br />
⎝ ⎠<br />
.<br />
⎛−2( ⋅ t−tA) ⎞<br />
1+ exp⎜<br />
⎟<br />
⎝ τ N ' ⎠<br />
Nsat<br />
o<br />
DD<br />
VDD<br />
mit τ N = ⋅CT<br />
I<br />
50% des Ausgangspegels wird zur Zeit t erreicht ( vo t 50% = 0.5VDD):<br />
τ ' ⎛ N V ⎞ TN<br />
t50% = ⋅ln ⎜3−4⋅ ⎟+<br />
t<br />
2 ⎝ VDD<br />
⎠<br />
Die Verzögerungszeit der fallenden Flanke ergibt sich damit zu:<br />
A<br />
.<br />
50 %<br />
( )<br />
⎡V<br />
⎛ ⎞⎤<br />
TN VDD<br />
−VTN<br />
VTN<br />
VDD<br />
t = ⋅ ⎢ +<br />
⎜ − ⋅ ⎟<br />
PHL τ N<br />
ln 3 4 ⎥ mit τ N = ⋅CT<br />
.<br />
⎣VDD<br />
2⋅V<br />
DD ⎝ VDD<br />
⎠⎦<br />
I Nsat<br />
Steigende Flanke am Ausgang:<br />
Die Ersatzkapazität wird durch den PMOS-Transistor aufgeladen, während der NMOS-<br />
Transistor gesperrt ist. Analog zur fallenden Flanke ergibt sich:<br />
⎡ V<br />
⎤<br />
TP VDD<br />
− VTP<br />
⎛ VTP<br />
⎞<br />
V<br />
⎢<br />
⎜ ⎟<br />
DD<br />
tPLH = τ P ⋅ + ln<br />
⎜<br />
3−<br />
4⋅<br />
⎟⎥<br />
mit τ P = ⋅CT<br />
.<br />
⎢⎣<br />
VDD<br />
2⋅V<br />
DD ⎝ VDD<br />
⎠⎥⎦<br />
I Psat<br />
Prof. Dr.-Ing. R. Laur - 177 -<br />
ITEM<br />
Nsat
Kapitel 6: Digitale Schaltungstechnik Integrierte Schaltungen II<br />
Für die Verzögerungszeit gilt:<br />
1<br />
t p = ⋅ PHL +<br />
2<br />
( t t )<br />
PLH<br />
.<br />
Unter der Voraussetzung symmetrischer Transistoren ( I Nsat<br />
VDD τ N = τ P = ⋅CT<br />
) folgt:<br />
I<br />
= I Psat = I sat , V TN = VTP<br />
= VT<br />
,<br />
sat<br />
⎡ V<br />
⎛ ⎞⎤<br />
T VDD<br />
−VT<br />
VT<br />
VDD t = ⋅ ⎢ + ⎜ − ⋅ ⎟<br />
p τ ln 3 4 ⎥ mit τ = ⋅CT<br />
.<br />
⎣VDD<br />
2⋅V<br />
DD ⎝ VDD<br />
⎠⎦<br />
I sat<br />
Für die Daten eines 1.2 µ m - Prozesses mit V = 0.<br />
75V<br />
, V = 5V<br />
ergibt sich damit:<br />
V<br />
0 C .<br />
DD<br />
t p ≈ . 52 ⋅ ⋅<br />
Isat<br />
T<br />
T<br />
Ein symmetrisches dynamisches Verhalten erfordert offensichtlich eine<br />
Transistordimensionierung, wie sie auch für ein symmetrisches stationäres Verhalten<br />
erforderlich ist.<br />
Approximation des dynamischen Verhaltens mittels einer RC-Ersatzschaltung:<br />
Die o.a. Approximation der Verzögerungszeit beschreibt den jeweils aktiven Transistor durch<br />
seine Ausgangskennlinie. Eine zusätzliche Vereinfachung ergibt sich, wenn der aktive Transistor<br />
durch einen Ohmschen Widerstand beschrieben wird. Dies entspricht dann der Schalternäherung<br />
des Transistors und es gelten die Beziehungen aus Kap. 6.1. Abbildung 6.24 zeigt,<br />
daß der Schalterwiderstand des aktiven Transistors sinnvollerweise zu<br />
V<br />
R S =<br />
I<br />
DD<br />
sat<br />
gewählt wird. Da der Lasttransistor stets gesperrt ist, ist der Lastwiderstand jeweils beliebig<br />
groß. Für die Verzögerungszeiten ergibt sich damit entsprechend Kap. 6.1:<br />
VDD<br />
t pHL ≈ 0 . 7⋅τ<br />
N mit τ N = RN ⋅CT<br />
= ⋅CT<br />
,<br />
I<br />
Nsat<br />
VDD<br />
t pLH ≈ 0 . 7⋅τ<br />
P mit τ P = RP ⋅CT<br />
= ⋅CT<br />
,<br />
I<br />
Psat<br />
1<br />
tp = ⋅ ( tPHL + tPLH) ≈0.7 ⋅ ( Rn + RP)<br />
⋅C T.<br />
2<br />
Für erste Abschätzungen genügt die Näherung:<br />
t ≈ ( R + R ) ⋅C<br />
.<br />
p<br />
n<br />
P<br />
T<br />
Prof. Dr.-Ing. R. Laur - 178 -<br />
ITEM<br />
DD
Kapitel 6: Digitale Schaltungstechnik Integrierte Schaltungen II<br />
I DN<br />
R SN=V DD/I Nsat<br />
Abbildung 6.24: Ersatzwiderstand des NMOS-Transistors<br />
Unter der Voraussetzung symmetrischer Transistoren ( I Nsat = I Psat = I sat ) folgt:<br />
V<br />
0 C .<br />
DD<br />
t p ≈ . 7 ⋅ ⋅<br />
I sat<br />
T<br />
Dieser Wert liegt in der Größenordnung der exakteren Näherung und weicht lediglich um etwa<br />
30% von dieser ab. Abbildung 6.24 zeigt, daß die Widerstandsnäherung den Transistorstrom<br />
unterschätzt. Daraus resultiert eine höhere Verzögerungszeit als bei der exakteren Näherung.<br />
Unter Annahme der Widerstandsnäherung lassen sich die Anstiegs- und Abfallzeiten näherungsweise<br />
sehr einfach berechnen:<br />
t f = t10<br />
% − t90%<br />
= −τ<br />
N ⋅(ln0.<br />
1−<br />
ln0.<br />
9)<br />
= 2.<br />
2⋅τ<br />
N und entsprechend<br />
t = 2 . 2⋅τ<br />
.<br />
r<br />
P<br />
6.2.5 Prozeßspezifische Zeitkonstante<br />
Das dynamische Verhalten des Inverters wird durch die Zeitkonstanten τ N und τ P bestimmt.<br />
Ohne Berücksichtigung der Substratkapazitäten und ohne Berücksichtigung der Leitungskapazität<br />
wird die Ersatzkapazität lediglich von den Gate-Kapazitäten des Steuer- und des<br />
Lastinverters bestimmt:<br />
CT ≈ 4 CGDP +4 CGDN + CGSP + CGSN.<br />
Im Triodengebiet gilt:<br />
1<br />
CGS ≈ CGD<br />
≈ W ⋅ L ⋅C'<br />
Ox , C T ≈ 5⋅W ⋅ L ⋅C'<br />
Ox .<br />
2<br />
Für die Zeitkonstanten gilt damit:<br />
VDD<br />
VDD<br />
2<br />
τ N = ⋅CT<br />
≈<br />
⋅5<br />
⋅W<br />
⋅ L ⋅C'<br />
Ox ∝ L und entsprechend<br />
I<br />
W<br />
Nsat<br />
2<br />
0.<br />
5⋅<br />
µ n ⋅ ⋅C'<br />
Ox⋅(<br />
VDD<br />
−VTN<br />
)<br />
L<br />
2<br />
N L . ∝ τ<br />
Das dynamische Verhalten des CMOS-Inverters wird also im wesentlichen durch L 2 bestimmt,<br />
während sich die Gateweite nicht auf die Verzögerungszeiten auswirkt. Die minimale<br />
Gatelänge legt demnach die Zeitkonstanten eines spezifischen Prozesses fest. Wird besonde-<br />
Prof. Dr.-Ing. R. Laur - 179 -<br />
ITEM<br />
V DD<br />
I Nsat<br />
V DSN
Kapitel 6: Digitale Schaltungstechnik Integrierte Schaltungen II<br />
rer Wert auf minimale Verzögerungszeiten gelegt, wird die Gatelänge minimal gewählt. Die<br />
Symmetrierung der Transistoren kann dann über die Gateweite vorgenommen werden:<br />
k N<br />
Ln = LP<br />
= Lmin<br />
, W P = kR ⋅WN<br />
= ⋅WN<br />
, kR<br />
= 2...<br />
3,<br />
k<br />
TN TP V V = , . τ τ τ = = N P<br />
P<br />
Prof. Dr.-Ing. R. Laur - 180 -<br />
ITEM
Kapitel 6: Digitale Schaltungstechnik Integrierte Schaltungen II<br />
6.3 Statische CMOS-Gatterschaltungen<br />
Gatterschaltungen realisieren in der Regel invertierte logische Funktionen:<br />
y = f( x)<br />
.<br />
Abbildung 6.25 zeigt das Prinzip einer CMOS-Gatterschaltung. Es besteht aus zwei Netzwerken,<br />
die die logische Funktion als Schalterfunktion realisieren. Das Pulldown-Netzwerk realisiert<br />
die logische Funktion mit NMOS-Transistoren, während das Pullup-Netzwerk die<br />
invertierte logische Funktion mit PMOS-Transistoren realisiert. Ist die logische Funktion erfüllt,<br />
leitet das Pulldown-Netzwerk und das Pullup-Netzwerk ist gesperrt. Der Signalknoten<br />
liegt auf Bezugspotential. Ist die logische Funktion nicht erfüllt, sperrt das Pulldown-<br />
Netzwerk und das Pullup-Netzwerk leitet. Der Signalknoten liegt auf dem Potential der Versorgungsspannung.<br />
Damit ist die gewünschte, negierte logische Funktion realisiert.<br />
x 1 ... x n<br />
...<br />
...<br />
Abbildung 6.25: Prinzipielle Funktionsweise statischer CMOS-Gatterschaltungen<br />
Die UND-Funktion wird in Schalternetzen durch Serienschaltung realisiert. Entsprechend<br />
wird die ODER-Funktion durch Parallelschaltung realisiert. Gemäß dem Prinzip von De Morgan<br />
gilt:<br />
A ∧ B = A∨<br />
B , A∨ B = A ∧ B .<br />
Die Negation einer UND-Funktion erfordert den Ersatz der Serienschaltung durch eine Parallelschaltung<br />
wobei gleichzeitig die Schalterfunktion negiert wird. Die Negation der Schalterfunktion<br />
wird durch den Wechsel der Transistorpolarität erreicht. Entsprechend erfordert die<br />
Negation der ODER-Funktion den Ersatz der Parallelschaltung durch eine Serienschaltung<br />
einschließlich des Wechsels der Transistorpolarität.<br />
6.3.1 NAND-Gatter<br />
Abbildung 6.26 zeigt das Beispiel eines NAND-Gatters. Das Pulldown-Netzwerk realisiert<br />
die UND-Funktion durch Serienschaltung von NMOS-Transistoren. Die invertierte Schaltfunktion<br />
wird im Pullup-Netzwerk durch Parallelschaltung von PMOS-Transistoren realisiert.<br />
- Für A = B = 1 leitet das Pulldown-Netzwerk und das Pullup-Netzwerk sperrt. Für den<br />
Ausgangsknoten gilt damit F=0.<br />
- Für A = 1 ∧ B = 0 ∨ A = 0 ∧ B = 1 ∨ A = 0 ∧ B = 0 sperrt das Pulldown-Netzwerk und<br />
das Pullup-Netzwerk leitet. Für den Ausgangsknoten gilt damit F=1.<br />
Prof. Dr.-Ing. R. Laur - 181 -<br />
ITEM<br />
f<br />
f<br />
V DD<br />
P<br />
N<br />
y
Kapitel 6: Digitale Schaltungstechnik Integrierte Schaltungen II<br />
Damit gilt:<br />
F = A⋅<br />
B .<br />
Abbildung 6.26: CMOS-NAND-Gatter mit 2 Eingängen<br />
A<br />
M3<br />
B<br />
V DD<br />
M2<br />
M1<br />
M4<br />
Wird ein vergleichbares symmetrisches stationäres und dynamisches Verhalten wie beim<br />
Inverter gefordert, müssen die Transistorgeometrien geeignet gewählt werden. Damit die<br />
Kette aus zwei NMOS-Transistoren dem NMOS-Transistor des Inverters entspricht, ist eine<br />
Verdopplung der Weite notwendig. Bei minimaler Länge ergibt dies eine<br />
⎛W<br />
⎞ 4λ<br />
Transistorabmessung ⎜ ⎟ = . Die PMOS-Transistoren werden wie beim Inverter<br />
⎝ L ⎠ N 2λ<br />
dimensioniert, weil im ungünstigsten Fall nur ein Transistor leitet. Der Flächenbedarf des 2fach<br />
NAND-Gatters wird dann zu:<br />
2 2 2<br />
A = 2⋅<br />
2⋅<br />
A + 2⋅<br />
A = 16λ<br />
+ 20λ<br />
= 36λ<br />
= 2,<br />
6⋅<br />
A<br />
NAND2<br />
N<br />
P<br />
Ein NAND-Gatter mit n Eingängen wird durch n NMOS-Transistoren im Pulldown-Netzwerk<br />
und durch n PMOS-Transistoren im Pullup-Netzwerk realisiert. Die NMOS-Transistoren<br />
müssen mit n-facher Weite realisiert werden. Der Flächenbedarf des n-fach NAND beträgt<br />
damit:<br />
2<br />
2 2<br />
2<br />
2<br />
ANANDn = n ⋅ AN<br />
+ n ⋅ AP<br />
= 4⋅ n ⋅λ<br />
+ 10⋅<br />
n ⋅λ<br />
= n ⋅(<br />
4n<br />
+ 10)<br />
⋅λ<br />
n 2 3 4<br />
ANAND/λ 2 36 66 104<br />
Der Entwurf unter Beachtung der Flächenverhältnisse wird als ratioed design bezeichnet.<br />
Trotz der Einhaltung der Flächenverhältnisse verschlechtern sich die Verzögerungszeiten.<br />
Dieser Effekt begründet sich mit der erheblichen Erhöhung der Ersatz-Lastkapazität CT sowie<br />
dem Effekt, daß die Entladung dieser Kapazität über Transistorketten erfolgt, wie dies in<br />
Prof. Dr.-Ing. R. Laur - 182 -<br />
ITEM<br />
Inv<br />
F
Kapitel 6: Digitale Schaltungstechnik Integrierte Schaltungen II<br />
Abbildung 6.27 dargestellt ist. Die Erhöhung der Substratspannung in der NMOS-Kette bewirkt<br />
eine höhere Schwellenspannung der Transistoren und damit einen höheren "Widerstand",<br />
der einen geringeren Entladestrom zur Folge hat.<br />
N<br />
N<br />
N CL1 CL2 CT<br />
Abbildung 6.27: Schematische Darstellung des Pull-Down-Netzwerkes<br />
VSB1<br />
Zur Flächeneinsparung können Transistorabmessungen wie beim Inverter verwendet werden:<br />
2<br />
2<br />
2<br />
A N = 4λ , AP<br />
= 10λ , ANAND = n⋅14λ<br />
.<br />
Diese Art des Entwurfs ohne Beachtung der Flächenverhältnisse wird als ratioless design bezeichnet.<br />
Ratioless design bewirkt eine deutliche Erhöhung der Verzögerungszeiten:<br />
t pHL n⋅<br />
t pHL,<br />
INV , t pLH > t pLH , INV<br />
> .<br />
6.3.2 NOR-Gatter<br />
Abbildung 6.28 zeigt ein CMOS-NOR-Gatter mit zwei Eingängen. Im Pulldown-Netzwerk<br />
wird die ODER-Funktion als Schalterfunktion mit NMOS-Transistoren realisiert. Entsprechend<br />
wird im Pullup-Netzwerk die UND-Funktion mit PMOS-Transistoren realisiert.<br />
- Für A = 1 ∧ B = 0 ∨ A = 0 ∧ B = 1 ∨ A = 1 ∧ B = 1 leitet das Pulldown-Netzwerk und das<br />
Pullup-Netzwerk sperrt. Für den Ausgangsknoten gilt damit F=0.<br />
- Für A = 0 ∧ B = 0 sperrt das Pulldown-Netzwerk und das Pullup-Netzwerk leitet. Für den<br />
Ausgangsknoten gilt damit F=1.<br />
Damit gilt:<br />
F = A + B .<br />
Prof. Dr.-Ing. R. Laur - 183 -<br />
ITEM<br />
VSB2<br />
VSB3
Kapitel 6: Digitale Schaltungstechnik Integrierte Schaltungen II<br />
A B<br />
Abbildung 6.28: CMOS-NOR mit 2 Eingängen<br />
Der Flächenbedarf für NOR-Gatter ist größer als bei NAND-Gattern. Für ein NOR-Gatter mit<br />
n Eingängen ergibt sich folgender Flächenbedarf:<br />
Ratioed Design:<br />
Ratioless Design:<br />
VDD<br />
2<br />
ANANDn = n ⋅ AN<br />
+ n ⋅ AP<br />
= n⋅<br />
4 + 10n<br />
2<br />
( ) ⋅λ<br />
n 2 3 4<br />
ANOR/λ 2 48 102 176<br />
2<br />
ANANDn = n⋅14λ<br />
t<br />
pLH<br />
><br />
n ⋅t<br />
pLH , INV , t pHL > t pHL,<br />
INV<br />
Die Verzögerungszeiten werden durch die erhöhten Lastkapazitäten, die Aufladung der Lastkapazitäten<br />
über die PMOS-Kette sowie durch die erhöhten Schwellenspannungen in der<br />
PMOS-Kette ungünstig beeinflußt.<br />
Prof. Dr.-Ing. R. Laur - 184 -<br />
ITEM<br />
F
Kapitel 6: Digitale Schaltungstechnik Integrierte Schaltungen II<br />
6.3.3 Komplexe logische Funktionen<br />
Komplexe logische Funktionen können wie üblich durch die Verschaltung von Grundgattern<br />
(AOI: AND-OR-INVERT) realisiert werden. In der Regel ist es jedoch hinsichtlich Flächenbedarf<br />
und Verzögerungszeit günstiger, diese als CMOS-Funktionalschaltungen zu realisieren.<br />
Als Beispiel soll die Funktion<br />
( D + E)<br />
C<br />
F = A⋅<br />
B + ⋅<br />
realisiert werden. Eine Realisierung mit Grundgattern (AOI)<br />
( D + E)<br />
⋅C<br />
= A⋅<br />
B ⋅(<br />
D + E)<br />
⋅C<br />
= A⋅<br />
B ⋅(<br />
D + E)<br />
C<br />
F = A⋅<br />
B +<br />
⋅<br />
erfordert ein NOR2-Gatter, drei NAND2-Gatter und 2 Inverter. Dies ergibt einen Flächenbe-<br />
2<br />
darf von 184 ⋅λ<br />
. Der längste Signalpfad umfaßt 5 Gatter. Die Gesamtverzögerungszeit entspricht<br />
damit etwa 5 Verzögerungszeiten eines CMOS-Inverters.<br />
E<br />
D<br />
C<br />
A<br />
B<br />
15 λ<br />
2 λ<br />
15 λ<br />
2λ<br />
15 λ<br />
2λ<br />
4 λ<br />
2 λ<br />
4 λ<br />
2 λ<br />
V DD<br />
10 λ<br />
2 λ<br />
15 λ<br />
2 λ<br />
4λ<br />
2λ<br />
4 λ 4 λ<br />
2 λ 2 λ<br />
Abbildung 6.29: CMOS-Funktionalschaltung<br />
Abbildung 6.29 zeigt eine Realisierung der Funktion als CMOS-Funktionalschaltung. Die<br />
Schaltungen der Netzwerke lassen sich einfach aus der Boolschen Gleichung ableiten:<br />
Pulldown-Netzwerk: (A in Serie mit B) parallel zu [C in Serie mit (D parallel zu E)]<br />
Pullup-Netzwerk: (A parallel B) in Serie zu [C parallel zu (D in Serie mit E)]<br />
In der Abbildung sind die Gateabmessungen für ratioed design angegeben. Insgesamt ergibt<br />
2<br />
sich ein Flächenbedarf von 180 ⋅λ<br />
, der dem der Gatterimplementierung entspricht. Die<br />
Verzögerungszeit entspricht etwa der eines Inverters und ist damit erheblich günstiger.<br />
2<br />
Für ratioless design ist der Flächenbedarf 70⋅ λ und für die Verzögerungszeiten gilt:<br />
Prof. Dr.-Ing. R. Laur - 185 -<br />
ITEM<br />
Z
Kapitel 6: Digitale Schaltungstechnik Integrierte Schaltungen II<br />
t pHL > 2⋅ t pHL,<br />
INV , t pLH > 3⋅<br />
t pHL,<br />
INV , t p > 2.<br />
5⋅<br />
t pHL,<br />
INV<br />
Bei deutlich reduziertem Flächenbedarf ist die Verzögerungszeit etwas günstiger als im Fall<br />
der AOI-Implementierung.<br />
6.3.4 Pseudo-NMOS-Schaltung<br />
Vollständige CMOS-Realisierungen statischer Gatterschaltungen sind sehr platzaufwendig.<br />
Durch das Ersetzen des Pullup-Netzwerkes durch einen leitenden PMOS-Transistor kann dieser<br />
Platzaufwand nahezu halbiert werden. Das NMOS-Pulldown-Netzwerk arbeitet mit einem<br />
Lasttransistor. Dies entspricht prinzipiell der Funktion der inzwischen veralteten NMOS-<br />
Logik. Daraus folgt die Bezeichnung Pseudo-NMOS-Logik.<br />
Ebenso wie bei der NMOS-Logik fließt im Low-Zustand am Ausgang ein Querstrom und es<br />
wird stationäre Verlustleistung benötigt. Die Verlustleistung kann durch Verlängerung des<br />
PMOS-Transistors auf Kosten der Verzögerungszeit reduziert werden. Um ein hinreichend<br />
niedriges VOL<br />
zu erhalten, sind breite NMOS-Transistoren im Pulldown-Netzwerk erforderlich.<br />
VDD<br />
NMOS<br />
Pull-Down<br />
Netzwerk<br />
Abbildung 6.30: Pseudo-NMOS-Gatterschaltung<br />
Für einen Pseudo-NMOS-Inverter ergibt sich die erforderliche Dimensionierung des NMOS-<br />
Transistors in Abhängigkeit von der geforderten Ausgangsspannung im L-Zustand (V oL ) zu:<br />
( VDD − | VTP<br />
| )<br />
( )<br />
⎛W ⎞ ⎛W ⎞ kP<br />
⎜ ⎟ = ⎜ ⎟ ⋅ ⋅<br />
2<br />
⎝ L ⎠ ⎝ L ⎠ k 2⋅<br />
V −V ⋅ V + V OL<br />
Beispiel: P<br />
N P N DD TN OL<br />
k 2.5<br />
= , | V TP | = VTN = 0.75V , VDD = 5V , VOL = 0.2V ,<br />
k 1<br />
W ⎛ ⎞<br />
⎜ ⎟ = 1<br />
⎝ ⎠<br />
N<br />
⎛W<br />
⎞<br />
⎜ ⎟<br />
⎝ L ⎠<br />
N<br />
≈<br />
⎛W<br />
⎞<br />
4 . 3⋅<br />
⎜ ⎟<br />
⎝ L ⎠<br />
P<br />
2<br />
Prof. Dr.-Ing. R. Laur - 186 -<br />
ITEM<br />
F<br />
L P
Kapitel 6: Digitale Schaltungstechnik Integrierte Schaltungen II<br />
Die Realisierung des NMOS-Pulldown-Netzwerkes ist sehr flächenauwendig. Daher sollten<br />
NAND-Strukturen vermieden und NOR-Strukturen bevorzugt werden. Sinnvolle Anwendungen<br />
der Pseudo-Logiken sind z.B. strukturierte NOR-basierte Logikarrays, wie beispielhaft in<br />
Abbildung 6.31 dargestellt.<br />
Abbildung 6.31: Pseudo-NMOS-NOR-Array<br />
A<br />
B<br />
X<br />
6.3.5 Transmission Gates<br />
Abbildung 6.32 zeigt je einen PMOS- und einen NMOS-Pass-Transistor. Beide Transistoren<br />
schalten das an A liegende Potential auf B, wenn das Kontrollsignal an C den Transistor einschaltet.<br />
Der Kondensator am Ausgang wird entsprechend geladen oder entladen:<br />
V<br />
A<br />
V DD<br />
= VDD<br />
, VB<br />
( 0)<br />
= 0 : Beide Kondensatoren werden geladen. Beim NMOS-Transistor wirkt<br />
B = VDD −VTN<br />
V =<br />
B als Source. Da der NMOS-Transistor nur für V GS TN leitet, wird der Kondensator lediglich<br />
auf V geladen. Beim PMOS-Transistor erfolgt die Aufladung des Kondensators<br />
jedoch bis V .<br />
V ≥<br />
A<br />
B<br />
B<br />
DD<br />
DD<br />
V = 0 , V ( 0)<br />
= V : Beide Kondensatoren werden entladen. Beim PMOS-Transistor wirkt<br />
B als Source. Da der PMOS-Transistor nur für V GS ≤ VTP<br />
< 0 leitet, wird der Kondensator lediglich<br />
auf B TP V =<br />
B 0 =<br />
V entladen. Beim NMOS-Transistor erfolgt die Entladung des Kondensators<br />
jedoch bis V .<br />
Die Pass-Transistoren wirken wie Schalter, wobei der PMOS-Transistor den H-Pegel ohne<br />
Spannungsverlust schaltet, während beim NMOS-Transistor eine Spannungsdifferenz in Höhe<br />
der Schwellenspannung verbleibt. Entsprechend schaltet der NMOS-Transistor den L-Pegel<br />
ohne Spannungsverlust, während beim PMOS-Transistor eine Pegeldifferenz in Höhe der<br />
Schwellenspannung verbleibt.<br />
Prof. Dr.-Ing. R. Laur - 187 -<br />
ITEM<br />
F
Kapitel 6: Digitale Schaltungstechnik Integrierte Schaltungen II<br />
A<br />
A<br />
V DD<br />
0<br />
C<br />
0<br />
Abbildung 6.32: Pass-Transistoren<br />
Das Problem des Spannungsverlusts wird durch Parallelschalten eines PMOS- und eines<br />
NMOS-Transistors, wie in Abbildung 6.33 dargestellt, vermieden. Die Transistoren werden<br />
mit komplementären Kontrollsignalen gesteuert. Rechts ist das Schaltsymbol des CMOS-<br />
Transmission-Gates dargestellt. CMOS-Transmission-Gates werden als Schalter- oder primitive<br />
Logikelemente eingesetzt. Das Transmission-Gate stellt einen symmetrischen Schalter<br />
dar.<br />
A B<br />
Abbildung 6.33: CMOS-Transmission-Gate<br />
V i<br />
C<br />
C<br />
C<br />
C<br />
C<br />
V DD<br />
C T<br />
B<br />
B<br />
C T<br />
C T<br />
C<br />
A B<br />
Abbildung 6.34: CMOS-Transmission-Gate mit Lastkapazität<br />
Abbildung 6.34 zeigt ein Transmission-Gate mit Lastkapazität, das sich wie folgt verhält:<br />
C = 0: Knoten Vo ist isoliert, CT bleibt im ursprünglichen Zustand.<br />
C = 1: Vi = VDD ⇒ CT wird auf VDD aufgeladen,<br />
Vi = 0 ⇒ CT wird entladen.<br />
Prof. Dr.-Ing. R. Laur - 188 -<br />
ITEM<br />
V o<br />
C
Kapitel 6: Digitale Schaltungstechnik Integrierte Schaltungen II<br />
Das dynamische Verhalten kann durch ein einfaches Schaltermodell entsprechend Abbildung<br />
6.35 beschrieben werden. Der Ersatzwiderstand ergibt sich zu:<br />
R = R || R .<br />
T<br />
N<br />
P<br />
R N , RP<br />
sind die Ersatzwiderstände des NMOS- bzw. des PMOS-Transistors gemäß Kap.<br />
6.2.4:<br />
V<br />
V<br />
DD<br />
DD<br />
RN ≈ , RP ≈ .<br />
I Nsat I Psat<br />
Im Fall des „ratioed design“ ergibt sich mit symmetrischen NMOS- und PMOS-Transistoren<br />
mit βN β und V = P TN = |VTP|:<br />
V<br />
DD τ T = ⋅CT<br />
,<br />
2⋅<br />
I Nsat<br />
t ≈ t ≈ 0 . 7⋅τ<br />
.<br />
pLH<br />
pHL<br />
T<br />
Abbildung 6.36 zeigt den zeitlichen Verlauf des Ausgangssignals nach Einschalten des Transmission-Gates<br />
für unterschiedliche Eingangssignale.<br />
V i<br />
C = 1<br />
Abbildung 6.35: Dynamische Ersatzschaltung eines CMOS-Transmission-Gate<br />
Vo<br />
VDD<br />
Vo = 0<br />
Vi = VDD<br />
C=1<br />
Vo = VDD<br />
Vi = 0<br />
Abbildung 6.36: Zeitlicher Verlauf der Ausgangsgröße beim Transmission-Gate<br />
Im Fall ohne Flächenanpassung (ratioless design) gilt:<br />
V<br />
2 τ C .<br />
DD<br />
RP ≈ . 5⋅<br />
RN<br />
⇒ RT<br />
≈ 0.<br />
7⋅<br />
RN<br />
⇒ T ≈ 0.<br />
7⋅<br />
⋅<br />
I Nsat<br />
Anwendungsgebiete von Transmission-Gates:<br />
• An- und Ausschalten eines Taktes<br />
• Öffnen/Schließen eines Rückkopplungszweiges<br />
Prof. Dr.-Ing. R. Laur - 189 -<br />
ITEM<br />
R T<br />
T<br />
t<br />
C T<br />
V o
Kapitel 6: Digitale Schaltungstechnik Integrierte Schaltungen II<br />
• Speichern eines Zustands am Ausgangsknoten<br />
• Vereinfachte Logik<br />
• Multiplexer / Demultiplexer<br />
Beispiel 1: Vereinfachte Logikschaltungen mit Transmission-Gates am Beispiel eines XOR-<br />
Gatters<br />
Tabelle 5.1: Logiktabelle des XOR-Gatters<br />
A B A XOR B<br />
0 0 0<br />
0 1 1<br />
1 0 1<br />
1 1 0<br />
Y = a⋅ b+ a⋅ b= a⋅ b+ a⋅ b= a+ b+ a+ b= a+ b+ a+ b<br />
Die Realisierung des XOR mit Standard-Gattern benötigt entweder 3 Inverter und 3 NOR(2)-<br />
Gatter oder 2 Inverter und 3 NAND(2)-Gatter. Durch die Verwendung einer Transmission-<br />
Gate-Schaltung werden nur 8 Transistoren zur Realisierung der Schaltungsfunktion benötigt,<br />
wenn man zusätzlich den Aufwand zur Invertierung der Eingangssignale berücksichtigt (vgl.<br />
Abbildung 6.37).<br />
A<br />
B<br />
A<br />
B<br />
Abbildung 6.37: XOR mit Transmission-Gates mit 2 Eingängen<br />
Die XOR-Funktion läßt sich auch durch die Schaltung in Abbildung 6.38 bestehend aus einem<br />
Transmission-Gate und einem Inverter realisieren. Der zusätzliche Aufwand zur Invertierung<br />
von B muß hinzugerechnet werden.<br />
Prof. Dr.-Ing. R. Laur - 190 -<br />
ITEM<br />
Z
Kapitel 6: Digitale Schaltungstechnik Integrierte Schaltungen II<br />
Abbildung 6.38: Vereinfachte XOR-Schaltung<br />
B<br />
A<br />
B<br />
Beispiel 2: Öffnen und Schließen von Rückkopplungszweigen, D-Flipflop<br />
Bei der in Abbildung 6.39 dargestellten Schaltung handelt es sich um ein setz- und rücksetzbares<br />
D-Flipflop.<br />
R<br />
S<br />
D<br />
C<br />
C<br />
>1<br />
-<br />
C<br />
>1<br />
-<br />
C C<br />
Abbildung 6.39: Flip-Flop mit Transmission-Gates<br />
Funktionsweise der Schaltung:<br />
C = 1: Master hält Zustand, Slave liefert Zustand an Q bzw. negierten Zustand an Q ,<br />
C = 0: Master übernimmt Zustand von D, Slave hält Zustand.<br />
Bei ansteigender Flanke an C wird der Zustand vom Master kapazitiv gehalten und an den<br />
Slave weitergegeben.<br />
R = 0, S = 1: Master und Slave werden gesetzt,<br />
R = 1, S = 0: Master und Slave werden zurückgesetzt.<br />
Beispiel 3: Multiplexer, Demultiplexer<br />
Abbildung 6.40 zeigt eine Multiplexerschaltung mit Transmission-Gates. Abhängig von den<br />
Kontrollsignalen Ci<br />
wird das Eingangssignal auf einen der Ausgänge geschaltet. Da die<br />
Transmission-Gates symmetrisch zwischen Aus- und Eingängen sind, kann die Schaltung<br />
ebenso als Demultiplexer genutzt werden. Abhängig von den Kontrollsignalen wird einer der<br />
Eingänge B ausgewählt. Dessen Signal wird auf den Ausgang A geschaltet.<br />
i<br />
Prof. Dr.-Ing. R. Laur - 191 -<br />
ITEM<br />
C<br />
>1<br />
-<br />
C<br />
C<br />
Z<br />
>1<br />
-<br />
Q<br />
Q
Kapitel 6: Digitale Schaltungstechnik Integrierte Schaltungen II<br />
Abbildung 6.40: Multiplexer, Demultiplexer<br />
A<br />
Prof. Dr.-Ing. R. Laur - 192 -<br />
ITEM<br />
C 1<br />
C 2<br />
B 1<br />
B 2
Kapitel 6: Digitale Schaltungstechnik Integrierte Schaltungen II<br />
6.4 Dynamische CMOS-Logik<br />
Der Schaltungsaufwand für statische CMOS-Logik ist verhältnismäßig groß. Sowohl im Pulldown-<br />
als auch im Pullup-Netzwerk wird die logische Funktion oder ihre Inverse als Schalterfunktion<br />
realisiert. In dieser Hinsicht ist die statische CMOS-Logik redundant. Jeder Eingang<br />
ist mit zwei Gates verbunden. Insbesondere wenn die Flächenverhältnisse zur Symmetrierung<br />
eingehalten werden (ratioed design) wird die kapazitive Last am Eingang und der Flächenaufwand<br />
relativ groß.<br />
Bei der dynamischen Logik entfällt das redundante Pullup-Netzwerk. Zusätzlich wird die logische<br />
Information als Ladung auf einer Knotenkapazität gespeichert, wie dies in Abbildung<br />
6.41 dargestellt ist. Die Knotenkapazität C n faßt alle mit dem Knoten verknüpften Gate-, Leitungs-<br />
und Sperrschichtkapazitäten zusammen. Ist das Transmission-Gate eingeschaltet, wird<br />
je nach logischen Zustand am Knoten A, die Knotenkapazität auf V DD geladen oder entladen.<br />
Der Zustand bleibt nach Abschalten des Transmissiongates erhalten. Der invertierte Zustand<br />
erscheint am Ausgang D des Inverters. Sperrströme von Diffusionsgebieten, die mit dem<br />
Knoten verknüpft sind, entladen die Knotenkapazität. Die Zeitkonstante des Entladevorgangs<br />
beträgt einige zehn Millisekunden. Die Information muß demnach über das Transmissiongate<br />
mit einem Takt φ von einigen 100 Hz Taktfrequenz aufgefrischt werden.<br />
A B<br />
φ<br />
C n<br />
Abbildung 6.41: Speicherung logischer Zustände auf einer Knotenkapazität<br />
Abbildung 6.42 zeigt, wie mit diesem Prinzip auf einfache Weise ein Schieberegister aufgebaut<br />
werden kann. Voraussetzung dafür ist, daß sich die beiden Takte φ1 und φ2<br />
nicht überlappen,<br />
wie dies in der Abbildung dargestellt ist. Die Auffrischung der Ladung erfolgt bei jedem<br />
Schiebetakt durch die Inverter.<br />
Prof. Dr.-Ing. R. Laur - 193 -<br />
ITEM<br />
D
Kapitel 6: Digitale Schaltungstechnik Integrierte Schaltungen II<br />
φ 1<br />
φ 2<br />
A<br />
φ 1<br />
C n<br />
B 1 B 2 B 3<br />
φ C 2 φ C n n<br />
1<br />
Abbildung 6.42: Schieberegister mit nicht-überlappendem Taktschema<br />
6.4.1 Precharge-Evaluation-Logik (PE)<br />
Die PE-Logik (Abbildung 6.43) realisiert das dynamische Prinzip auf einfache Weise. Es wird<br />
ein einfacher Takt (Clk) verwendet:<br />
- φ = 0 : Die Knotenkapazität n des Ausgangsknotens wird auf V vorgeladen (Precharge-Phase).<br />
C DD<br />
- φ = 1:<br />
Die logische Funktion wird ausgewertet, d.h. das Pulldown-Netzwerk entlädt die<br />
Knotenkapazität oder beläßt die Ladung auf der Knotenkapazität:<br />
A ⋅ B + C = 1:<br />
= 0 , wird entladen,<br />
C<br />
Z n<br />
A ⋅ B + C = 0:<br />
= 1,<br />
bleibt geladen.<br />
C<br />
φ<br />
Z n<br />
A<br />
B<br />
V DD<br />
Precharge-Transistor<br />
Evaluate-Transistor<br />
Abbildung 6.43: Einfache dynamische Grundschaltung<br />
Prof. Dr.-Ing. R. Laur - 194 -<br />
ITEM<br />
C<br />
C n<br />
Z<br />
t<br />
t
Kapitel 6: Digitale Schaltungstechnik Integrierte Schaltungen II<br />
Die PE-Logik zeigt die wesentlichen Vorteile des dynamischen Logikkonzepts gegenüber<br />
statischer Logik:<br />
- Das Pullupnetzwerk wird durch den PMOS-Takttransistor und die Knotenkapazität<br />
ersetzt. Die Transistorzahl wird damit reduziert.<br />
- Da lediglich die kleine Knotenkapazität geladen und entladen werden muß, sind<br />
die Flächenansprüche an die Takttransistoren und an das NMOS-<br />
Pulldownnetzwerk gering. In der Regel können Minimaltransistoren verwendet<br />
werden.<br />
- Die Eingangskapazität ist wegen der fehlenden PMOS-Transistoren im Pullupnetzwerk<br />
deutlich geringer als bei statischer Logik. Die geringere Eingangskapazität<br />
resultiert in geringere Verzögerungszeiten.<br />
Die wesentlichen Nachteile sind:<br />
- Der zusätzliche Aufwand für die Taktgenerierung und die Verteilung des Takts.<br />
- Oft sind komplizierte Taktschemata (z.B. nichtüberlappende Takte) erforderlich.<br />
- Die Taktfrequenz darf nicht beliebig reduziert werden, da dann die Knotenkapazitäten<br />
durch parasitäre Sperrströme entladen werden.<br />
- Der hochimpedante Ausgangsknoten ist empfindlich gegen Störungen, z.B. durch<br />
kapazitive Signaleinkopplung.<br />
- Die logische Funktion steht zeitlich nur teilweise (und zwar nicht in der Precharge-Phase)<br />
zur Verfügung.<br />
- Durch Ladungsteilung mit anderen Knotenkapazitäten (charge sharing) wird die<br />
Spannung am Speicherknoten reduziert.<br />
Bei der Kaskadierung von PE-Gattern kann das sog. Race-Problem auftreten. Wird Knoten<br />
N1<br />
, wie in Abbildung 6.44 dargestellt, durch eine Transistorkette entladen, ist dieser Entladevorgang<br />
möglicherweise relativ langsam. Dies löst eine ungewollte Teilentladung des Knotens<br />
N2<br />
über den Transistor M1 aus, bis die Schwellenspannung von M1 unterschritten wird.<br />
Das Race-Problem kann durch komplizierte Taktschemata vermieden werden.<br />
Prof. Dr.-Ing. R. Laur - 195 -<br />
ITEM
Kapitel 6: Digitale Schaltungstechnik Integrierte Schaltungen II<br />
CLK<br />
Abbildung 6.44: Race-Problem bei kaskadierter PE-Logik<br />
VDD<br />
N1<br />
CLK<br />
6.4.2 Domino-Logik<br />
Die Domino-Logik (Abbildung 6.45) vermeidet das Race-Problem, indem durch statische Inverter<br />
die Eingangstransistoren der nachfolgenden Schaltungsstufe gesperrt werden. Damit<br />
wird sichergestellt, daß der Vorladezustand gehalten wird.<br />
Nachteilig an der Domino-Logik ist, daß aufgrund der zusätzlichen Inverter keine negierten<br />
Logikfunktionen zur Verfügung stehen. Die Gatterverzögerung wird durch die zusätzlichen<br />
Inverter vergrößert.<br />
CLK<br />
VDD<br />
Abbildung 6.45: Domino-Grundschaltung<br />
N 1<br />
1<br />
CLK<br />
N2<br />
6.4.3 Verbesserte Domino-Logik (NORA-, No-race logic)<br />
Die NORA-Logik ist gekennzeichnet durch alternierend kaskadierte PMOS- und NMOS-<br />
Blöcke, die entsprechend auf VDD bzw. VSS vorgeladen werden. Damit werden in der Precharge-<br />
Phase die Transistoren der nächsten Kaskode gesperrt. Soll ein Ausgangssignal einer NMOS-<br />
Stufe auf eine weitere NMOS-Stufe geschaltet werden, so kann dies nur durch die Zwischen-<br />
Prof. Dr.-Ing. R. Laur - 196 -<br />
ITEM<br />
M1<br />
M1<br />
VDD<br />
VDD<br />
N3<br />
1<br />
N2<br />
N4
Kapitel 6: Digitale Schaltungstechnik Integrierte Schaltungen II<br />
schaltung eines Inverters geschehen. Damit bietet auch die NORA-Logik nur eingeschränkte<br />
Flexibiltät. Ein weiteres Problem ist das charge-sharing. Knotenkapazitäten mit VK = 0 werden<br />
in der Auswertephase parallel zum Ausgangsknoten, der nicht entladen werden sollte, geschaltet<br />
(siehe Abbildung 6.46). Ein Teil der Ladung von Cn dient zum Aufladen der Knotenkapazitäten<br />
CK - es resultiert ein Spannungsabfall an Cn.<br />
V DD<br />
zu anderen<br />
n-Logik-Blöcken<br />
1<br />
n-Logik-<br />
Block<br />
C K<br />
zu anderen<br />
p-Logik-Blöcken<br />
V DD<br />
zu anderen<br />
p-Logik-Blöcken<br />
p-Logik-<br />
Block<br />
CLK CLK<br />
CLK<br />
1<br />
zu anderen<br />
n-Logik-Blöcken<br />
Abbildung 6.46: Verbesserte Domino-Logik (Nora-Logik)<br />
C n<br />
V DD<br />
n-Logik-<br />
Block<br />
1<br />
zu anderen<br />
p-Logik-Blöcken<br />
zu anderen<br />
n-Logik-<br />
Blöcken<br />
6.4.4 Clocked-CMOS-Logik (C 2 MOS)<br />
C 2 MOS (Abbildung 6.47 zeigt einen Inverter, Abbildung 6.48 zeigt ein Logik-Gatter) verfügt<br />
wie statische CMOS-Gatter über vollständige Pullup- und Pulldownnetze. Zusätzlich werden<br />
zwei Takttransistoren benötigt.<br />
- φ = 1: Logik wird ausgewertet, Cn wird geladen bzw. entladen.<br />
- φ = 0: Der letzte Ausgangszustand wird auf Cn gehalten.<br />
Obwohl für die Realisierung einer dynamischen Gatterfunktion mehr Transistoren als bei der<br />
statischen Realisierung notwendig sind, ergibt sich ein geringerer Flächenbedarf, da Minimaltransistoren<br />
verwendet werden können. Weiterhin zeichnet sich C 2 MOS durch eine geringere<br />
Anzahl von Kontakten und weniger Überkreuzungen der Wannen aus.<br />
Prof. Dr.-Ing. R. Laur - 197 -<br />
ITEM
Kapitel 6: Digitale Schaltungstechnik Integrierte Schaltungen II<br />
φ<br />
V i<br />
V DD<br />
Abbildung 6.47: C 2 MOS-Inverter<br />
φ<br />
D<br />
E<br />
A<br />
CLK<br />
CLK<br />
Abbildung 6.48: C 2 MOS-Funktionalschaltung<br />
A<br />
V o<br />
V i<br />
VDD<br />
B D<br />
E<br />
Prof. Dr.-Ing. R. Laur - 198 -<br />
ITEM<br />
C<br />
B<br />
F<br />
C<br />
V DD<br />
φ<br />
φ<br />
V o
Kapitel 6: Digitale Schaltungstechnik Integrierte Schaltungen II<br />
6.5 MOS Ein-/Ausgangsschaltungen<br />
6.5.1 Ausgangs-Treiberschaltungen<br />
Häufig müssen, insbesondere am Chip-Ausgang, hohe kapazitive Lasten bei minimalen Verzögerungszeiten<br />
versorgt werden. Bei vorgegebener Lastkapazität kann der Ausgangsinverter<br />
mit einer mit dem Faktor a multiplizierten Weite realisiert werden, um den Ersatzwiderstand<br />
und damit die Zeitkonstante zu reduzieren. Letztlich wird dadurch nichts gewonnen, da die<br />
Eingangskapazität des Inverters und damit die Lastkapazität des letzten Standardinverters mit<br />
diesem Faktor multipliziert wird. Wird statt eines Inverters eine Kette von n Invertern verwendet,<br />
deren Weite jeweils mit dem Faktor a gegenüber dem jeweiligen Vorgänger vergrößert<br />
wird, ergibt sich für die Verzögerungszeit:<br />
RN<br />
+ RP<br />
2 RN<br />
+ RP<br />
n−1<br />
t p ≈ ( RN<br />
+ RP<br />
) ⋅(<br />
Co1<br />
+ a ⋅Ci1<br />
) + ⋅(<br />
a ⋅Co1<br />
+ a ⋅Ci1<br />
) + .... + ⋅(<br />
a ⋅C<br />
1 )<br />
n 1<br />
o + CL<br />
.<br />
−<br />
a<br />
a<br />
Ci1 ≈ 2⋅<br />
( CGDP<br />
+ CGDN<br />
) + CGSP<br />
+ CGSN<br />
≈1.<br />
5⋅<br />
COxP<br />
+ 1.<br />
5⋅<br />
COxN<br />
bezeichnet die Eingangskapazität<br />
n<br />
des Standartinverters. Der Faktor a kann nun so gewählt werden, daß C L = a ⋅C<br />
i1<br />
gilt. Dann<br />
folgt für die Verzögerungszeit:<br />
CL<br />
n<br />
t p ≈ n ⋅(<br />
RN<br />
+ RP<br />
) ⋅(<br />
Co1<br />
+ ( ) ⋅Ci1<br />
)<br />
C<br />
1<br />
1.<br />
5<br />
Das Minimum der Verzögerungszeit ergibt sich für<br />
CL<br />
n ≈ ln .<br />
C<br />
mit C o1<br />
≈ 2⋅ ( CGDP + CGDN<br />
) ≈ COxP<br />
+ COxN<br />
≈ ⋅Ci1<br />
i1<br />
i1<br />
1<br />
Soll z.B. eine Last von CL zeit von<br />
= 1000⋅ Ci1<br />
getrieben werden, folgt mit n ≈ 7 eine Verzögerungs-<br />
t ≈ ⋅(<br />
R + R ) ⋅(<br />
C + 2.<br />
7 ⋅C<br />
) ≈ 7 ⋅(<br />
R + R ) ⋅2<br />
⋅(<br />
C + C ) = 14⋅<br />
( R + R ) ⋅(<br />
C + C ) .<br />
p<br />
7 N P o1<br />
i1<br />
N P<br />
o1<br />
i1<br />
N P o1<br />
i1<br />
Würde die Last direkt von einem Standardinverter getrieben, ergäbe sich eine um den Faktor<br />
43 größere Verzögerungszeit:<br />
t ≈ R + R ) ⋅1000⋅<br />
C ≈ 600⋅<br />
( C + C ) ≈ 43⋅<br />
t .<br />
pS<br />
( N P<br />
i1<br />
o1<br />
i1<br />
6.5.2 Leitungstreiber<br />
Bei langen Leitungen, wie sie z.B. bei der Verteilung von Takten oder bei Bus-Strukturen erforderlich<br />
sind, muß die verteilte RC-Struktur (siehe Abbildung 6.49) berücksichtigt werden.<br />
Bis hin zu Frequenzen von 30 - 40GHz braucht der Induktivitätsbelag der Leitungen nicht berücksichtigt<br />
werden. Mit den Parametern:<br />
∆R<br />
∆C<br />
r = - Widerstandsbelag, c = - Kapazitätsbelag, l - Leitungslänge<br />
∆l<br />
∆l<br />
berechnet sich die Verzögerungszeit näherungsweise zu:<br />
t t r c<br />
2<br />
2<br />
pLH ≈ pHL ≈0.7⋅ ⋅ ⋅l , t p ( r,<br />
c,<br />
l)<br />
≈ 0.<br />
7⋅<br />
r ⋅c<br />
⋅l<br />
.<br />
Prof. Dr.-Ing. R. Laur - 199 -<br />
ITEM<br />
p
Kapitel 6: Digitale Schaltungstechnik Integrierte Schaltungen II<br />
Demnach besteht eine quadratische Abhängigkeit der Verzögerungszeit von der Leitungslänge.<br />
Abbildung 6.49: Verteilte RC-Leitung<br />
Wird die Verzögerungszeit aufgrund der Leitungslänge zu groß, so kann die Leitung, wie in<br />
Abbildung 6.50 dargestellt, in n-Abschnitte unterteilt und das Signal durch Inverter (Repeater)<br />
aufgefrischt werden.<br />
Abbildung 6.50: Leitung mit Repeatern<br />
Die Verzögerungszeit ergibt sich zu:<br />
⎛ l ⎞<br />
t ( n) ≈0.7⋅r⋅c⋅⎜ ⎟ ⋅ n+ ( n−1) ⋅t<br />
⎝n⎠ p prep<br />
Daraus resultiert:<br />
()<br />
( )<br />
2<br />
t p 1 0.7 ⋅r⋅c⋅l =<br />
2<br />
tpn ⎛ l ⎞<br />
0.7 ⋅r⋅c⋅⎜ ⎟ ⋅ n+ ( n−1) t<br />
⎝n⎠ 2<br />
prep<br />
.<br />
Ist die Verzögerungszeit der Repeater klein gegenüber der Verzögerungszeit der Leitungsstücke,<br />
ist die Aufteilung bereits für n > 2 günstiger.<br />
1<br />
1<br />
Beispiel: tpRep ≈ 0 , n = 2 ⇒ t p ( 2)<br />
= t p ( 1)<br />
, t p ( 3)<br />
= t p ( 1)<br />
2<br />
3<br />
Prof. Dr.-Ing. R. Laur - 200 -<br />
ITEM
Kapitel 6: Digitale Schaltungstechnik Integrierte Schaltungen II<br />
6.5.3 Bustreiber<br />
An einem Bussystem können mehrere Sender und Empfänger angeschlossen sein. Es darf<br />
allerdings nur ein Sender aktiv sein und das Leitungspotential vorgeben. Alle weiteren Sender<br />
müssen inaktiv sein und dürfen die Busleitung nicht belasten (vgl. Abbildung 6.51, unten),<br />
d.h. ihr Ausgang muß hochimpedant sein.<br />
Sender Sender Sender<br />
Sender Sender Sender<br />
Empf.<br />
nicht erlaubt<br />
Abbildung 6.51: Busssysteme<br />
Ausgangsstufen, die neben dem High- und Low-Pegel zusätzlich einen hochohmigen Zustand<br />
(Z) annehmen können werden als Tristate-Ausgänge bezeichnet. Abbildung 6.52 zeigt einen<br />
Inverter mit Tristate-Ausgang.<br />
V in<br />
Datensignal<br />
Abbildung 6.52: Tristate-Inverter<br />
1<br />
Enablesignal<br />
E<br />
&<br />
><br />
=1<br />
V in,P<br />
Empf.<br />
V DD<br />
1 V out<br />
V in,N<br />
Der Ausgang wird durch das Enable-Signal E = 0 aktiviert.<br />
E = 0: Vin,N = Vin , Vin,P = Vin : die Ausgangsstufe wirkt wie ein CMOS-Inverter: Vout=V<br />
in<br />
E = 1: Vin,N = 0, Vin,P = VDD : NMOS- und PMOS-Transistor sind gesperrt, der Ausgang<br />
ist im hochimpedanter Zustand<br />
Prof. Dr.-Ing. R. Laur - 201 -<br />
ITEM
Kapitel 6: Digitale Schaltungstechnik Integrierte Schaltungen II<br />
Der C 2 MOS-Inverter aus Abbildung 6.47 kann ebenfalls als Tristate-Inverter genutzt werden.<br />
Mit φ = 0 ist der Ausgang im hochimpedanten Zustand, während für φ = 1das<br />
Eingangssignal<br />
invertiert wird.<br />
6.5.4 Pads<br />
Ein- und Ausgänge werden an der Peripherie des Chips durch quadratische Metallflecke, den<br />
Pads gebildet. Diese werden über Bonddrähte mit den Anschlüssen des Gehäuses verschaltet.<br />
Bondpads werden als Standardelemente in Bibliotheken für jede Technologie angeboten und<br />
sollten unverändert übernommen werden. In der Regel werden Pads zur Spannungsversorgung<br />
an definierten Stellen der Chipperipherie platziert. Häufig werden mehrere Versorgungspads<br />
zur besseren Spannungsversorgung vorgesehen. Es ist üblich, bei gemischt analog/digitalen<br />
Schaltungen unterschiedliche Pads zur Versorgung von analogen und digitalen<br />
Schaltungsteilen zu verwenden, um das Übersprechen von digitalen Signalen auf analoge<br />
Schaltungsteile zu minimieren.<br />
2<br />
Die üblichen Padabmessungen liegen z.B. bei einem 0,8 µm CMOS-Prozess bei 85 x 85µ m .<br />
Der Padabstand entspricht in der Regel der Seitenabmessung der Pads. Werden verhältnismäßig<br />
viele Pads im Vergleich zur Schaltungsfläche benötigt, wird die Seitenfläche des Chips<br />
und damit die Chipfläche durch die Anzahl der Pads bestimmt. Man spricht von padlimitierter<br />
Fläche. In diesem Fall kann ein erheblicher Teil der Chipfläche leer sein.<br />
6.5.5 Eingangs-Schutzschaltungen<br />
Elektrostatische Aufladungen von Personen oder Geräten können integrierte Schaltungen im<br />
nichteingebauten Zustand gefährden.<br />
Bei einer angenommenen Dicke des Gateoxids eines MOS-Transistors von tOX = 20µm, einer<br />
maximalen Feldstärke EMAX,SiO2 = 10 . . . 15⋅10 6 V/m resultiert eine maximal zulässige Spannung<br />
VMAX = 20 . . . 30V. Wird dieser Wert überschritten, kann das Gate des Transistors zerstört werden.<br />
Abbildung 6.53 zeigt ein üblicherweise verwendetes Modell für eine elektrostatisch aufgeladene<br />
Person. Die gespeicherte elektrostatische Energie von 0.2mJ reicht aus, um 45 000µm 2<br />
Silizium zu schmelzen. Damit wird eine derart betroffene Integrierte Schaltung zerstört.<br />
100pF<br />
2KV<br />
1.5KΩ<br />
Wel = 0.2mJ<br />
Abbildung 6.53: Modell einer elektrostatisch aufgeladenen Person<br />
Die Eingangspads integrierter Schaltungen werden mit Eingangsschutzschaltungen versehen,<br />
die standardmäßig als Bibliothekselemente verfügbar sind, und nicht verändert werden sollten.<br />
Abbildung 6.54 zeigt das Prinzip einer derartigen Schutzschaltung mit einer Poly-Si-<br />
Leitung vom Bondpad und zwei Schutzdioden zu den Versorgungsspannungen. Die lange Poly-Si-Leitung<br />
wirkt als verteilte RC-Leitung als Tiefpaß und filtert hochfrequente Spannungsspitzen<br />
aus. Zudem wird die Energie der Spannungsspitzen im Widerstand der Leitung ver-<br />
Prof. Dr.-Ing. R. Laur - 202 -<br />
ITEM
Kapitel 6: Digitale Schaltungstechnik Integrierte Schaltungen II<br />
braucht. Die Schutzdioden schließen Spannungen am Ende der Leitung, die größer als die<br />
Versorgungsspannung oder negativ sind, gegen die Versorgungsspannung oder das Bezugspotential<br />
kurz.<br />
Die Poly-Leitung wird zur Platzeinsparung mäanderförmig ausgelegt. Die Schutzdioden sind<br />
Diffusionen im Substrat und in den Wannen, die mit Schutzringen versehen sind, um zu<br />
verhindern, daß im Ansprechfall Minoritätsträger in hoher Konzentration zum Latch-Up-<br />
Effekt führen können.<br />
Pad<br />
Polysilizium-Leitung<br />
Abbildung 6.54: Eingangsschutzschaltung mit Poly-Si-Leitung und Schutzdioden<br />
6.6 Bipolare digitale Grundschaltungen<br />
Die ersten digitalen Standardschaltungen waren bipolar. Es entstand eine Reihe von Schaltkreisfamilien,<br />
die heute, bis auf Spezialanwendungen, nahezu jede Bedeutung verloren haben.<br />
Insbesondere wurden die TTL-Standardschaltungen nahezu vollständig durch kompatible<br />
CMOS-Standardschaltungen abgelöst.<br />
6.6.1 RTL (Resistor-Transistor-Logic)<br />
Abbildung 6.55 zeigt einen RTL-Inverter. Wegen des Lastwiderstandes war der Flächenbedarf<br />
sehr groß. Wegen der niedrigen Schwellenspannung von 0,7V ergeben sich ungünstige<br />
Störabstände. Die Verzögerungszeiten sind groß, weil der Transistor im L-Zustand gesättigt<br />
ist. Im H-Zustand am Eingang wird dem ansteuernden Gatter erhebliche Steuerleistung<br />
entnommen.<br />
V i<br />
RB<br />
Prof. Dr.-Ing. R. Laur - 203 -<br />
ITEM<br />
VDD<br />
RC<br />
V o<br />
V DD
Kapitel 6: Digitale Schaltungstechnik Integrierte Schaltungen II<br />
Abbildung 6.55: RTL - Inverter<br />
6.6.2 DTL (Diode-Transistor-Logic)<br />
Durch die zusätzlichen Dioden am Eingang wird die Schwellenspannung erhöht und damit<br />
der Störabstand verbessert.<br />
Abbildung 6.56: DTL - Inverter<br />
Vi<br />
RB<br />
6.6.3 TTL (Transistor-Transistor-Logic)<br />
Abbildung 6.57 zeigt einen Inverter in TTL-Technologie. Die Dioden der DTL-Schaltung<br />
werden durch den Transistor T ersetzt.<br />
1<br />
Im H-Zustand am Eingang wird Transistor T 1 invers betrieben und ist gesättigt. Durch eine<br />
besonders geringe inverse Stromverstärkung, wird der Eingangsstrom im H-Zustand auf etwa<br />
0,1 mA begrenzt. Dadurch wird die erforderliche Treiberleistung minimiert. Im L-Zustand<br />
fließt aus dem Eingangsknoten ein Eingangsstrom von ca. –1,1 mA, der vom Ausgang des ansteuernden<br />
Gatters aufgenommen werden muß.<br />
V i<br />
R 1 R 2 R 3<br />
T 1<br />
R 4<br />
T 2<br />
Abbildung 6.57: TTL – Inverter<br />
Bei einem H-Zustand am Eingang steuert der invers betriebene Eingangstransistor den Transistor<br />
T2 an. Der Emitterstrom von T 2 steuert 4 an. Der Kollektorstrom von T bewirkt einen<br />
Spannungsabfall an . Dies verringert die Basis-Emitterspannung von T so, daß dieser<br />
T 2<br />
T 3<br />
T 4<br />
VDD<br />
R2 3<br />
Prof. Dr.-Ing. R. Laur - 204 -<br />
ITEM<br />
D<br />
RC<br />
V CC<br />
V o<br />
Vo
Kapitel 6: Digitale Schaltungstechnik Integrierte Schaltungen II<br />
sperrt. Die Ausgangsspannung entspricht der Sättigungsspannung des Transistors T 4 in Höhe<br />
von einigen 100 mV.<br />
Bei L-Zustand am Eingang ist der Transistor T 1 vorwärts im gesättigten Zustand. Dadurch<br />
wird T2 und damit T 4 gesperrt. Die Basis von T 3 wird über 2 mit Basisstrom versorgt. Die<br />
Ausgangsspannung ergibt sich näherungsweise zu<br />
R<br />
≈ V −V<br />
−V<br />
≈ 5V<br />
−1.<br />
4V<br />
= 3.<br />
6V<br />
.<br />
Vo CC BE3<br />
D<br />
Die Diode D hat die Aufgabe, Transistor T 3 im L-Zustand sicher zu sperren.<br />
Bei der TTL-Ausgangsstufe handelt es sich um eine Gegentaktendstufe, die im H-Zustand<br />
Treiberleistung liefert und im L-Zustand den Eingangsstrom der Folgegatter aufnehmen kann.<br />
Die Verzögerungszeit der TTL-Schaltung wird dadurch minimiert, daß der Eingangstransistor<br />
in beiden Eingangszuständen gesättigt ist. Damit müssen die Ladungsträger aus der Basis<br />
nicht ausgeräumt werden. Es existierten eine Vielzahl von Modifikationen der TTL-Logik,<br />
die die Schaltungsparameter weiter verbesserten.<br />
6.6.4 ECL (Emitter-Coupled-Logic)<br />
Die ECL-Logik stellt eine ungesättigte Logik mit sehr kurzen Verzögerungszeiten < 1ns dar.<br />
In Abbildung 6.58 ist der schematische Aufbau des ECL-Inverters dargestellt. Der Aufbau<br />
entspricht dem eines Differenzverstärkers. Durch eine geringe Differenzspannung ∆V am Eingang,<br />
wird der Strom der Stromquelle zwischen beiden Transistoren umgeschaltet.<br />
Abbildung 6.58: ECL-Inverter<br />
Vref+∆V<br />
I C1<br />
T 1<br />
ECL-Schaltungen stellen in der Regel den invertierten und den nichtinvertierten Ausgang zur<br />
Verfügung. In Abbildung 6.59 ist ein ECL-NOR/OR-Gatter dargestellt. Die Transistoren T2<br />
und T3 bilden den Differenzverstärker. Bereits geringe Spannungsdifferenzen<br />
|VB2 - VB3| > 100mV<br />
schalten den Strom durch RE von T2 nach T3 oder umgekehrt. Die Basis von Transistor T3 liegt<br />
an der Referenzspannung. Für den Strom IRE gilt:<br />
5.2V −1.3V −0.6V<br />
IRE ≈ = 4.7mA<br />
700Ω<br />
V2 > Vref + 100mV: ⇒ IC2 ≈ I RE<br />
⇒ IC3 ≈ 0<br />
V2 < Vref - 100mV: ⇒ IC2 ≈ 0<br />
Prof. Dr.-Ing. R. Laur - 205 -<br />
ITEM<br />
I K<br />
T 2<br />
I C2<br />
Vref
Kapitel 6: Digitale Schaltungstechnik Integrierte Schaltungen II<br />
⇒ IC3 ≈ IRE<br />
Unter der Annahme von VE ≈ -1.9V ergibt sich die minimale Kollektor-Emitter-Spannung des<br />
leitenden Transistors zu:<br />
V ( T2, T3) ≈ V −I ⋅ R = 1.9V −4.7mA⋅220Ω= 0.87V<br />
CE min E RE 1<br />
Der jeweils leitende Transistor ist stets ungesättigt.<br />
Die Transistoren T4 und T5 bilden mit den Widerständen R5 und R6 Emitterfolger. Hierfür gilt:<br />
VE ≈ VB - 0.7V im leitenden Zustand<br />
Daraus resultieren die Ausgangspegel:<br />
V ≈0V − R2⋅I 5 −07 . V ≈−09<br />
. V<br />
oH B<br />
VoL ≈ −R2<br />
⋅ I RE − 0.<br />
7V<br />
≈ −1.<br />
6V<br />
Die Referenzspannung wird in die Mitte von VoH und VoL gelegt, um ein sicheres Schalten des<br />
Differenzverstärkers zu gewährleisten.<br />
−09 . V −16<br />
. V<br />
VRef<br />
≈ ≈−13<br />
. V<br />
2<br />
Abbildung 6.60 zeigt das Übertragungsverhalten des untersuchten Gatters.<br />
U1<br />
R1<br />
VC<br />
R2<br />
T1 T2 T3<br />
Abbildung 6.59: ECL-NOR/OR-Gatter<br />
Va /V<br />
-0,4<br />
-0,6<br />
-0,8<br />
-1,0<br />
-1,2<br />
-1,4<br />
-1,6<br />
-1,8<br />
U2<br />
<br />
<br />
<br />
<br />
<br />
<br />
NOR<br />
VE<br />
RE<br />
R3<br />
Vref<br />
-1,3V<br />
T4<br />
T 5<br />
R4 R5 R6<br />
-5,2V -5,2V -5,2V -5,2V<br />
OR<br />
<br />
<br />
<br />
<br />
<br />
<br />
-2,0<br />
-2,0 -1,8 -1,6 -1,4 -1,2 -1,0 -0,8 -0,6 -0,4 -0,2 0<br />
Abbildung 6.60: Übertragungscharakteristik des ECL-NOR/OR-Gatters<br />
Ve /V<br />
Prof. Dr.-Ing. R. Laur - 206 -<br />
ITEM<br />
Ua1<br />
Ua2
Kapitel 6: Digitale Schaltungstechnik Integrierte Schaltungen II<br />
Die ECL-Technik ist vergleichsweise flächenaufwendig. ECL-Schaltungen sind teuer und<br />
verbrauchen relativ viel Verlustleistung. Sie werden insbesondere für Hochleistungsrechner<br />
verwendet.<br />
6.6.5 BiCMOS<br />
BiCMOS (Bipolar-CMOS-Technologie, vgl. Kap. 4.14) vereint die Vorteile von Bipolar- und<br />
CMOS-Schaltungen. Bipolare Schaltungen zeichnen sich in der Regel durch hohe Treiberleistung<br />
und geringe Verzögerungszeiten, CMOS-Schaltungen durch geringe Verlustleistungen<br />
aus. Nachteilig an der BiCMOS-Technolgie sind die zur Erzeugung aufwendigen Technologieschritte.<br />
Die Bipolartransistoren werden in n-Wannen mit vergrabener n + -Schicht (burried<br />
layer) realisiert. In diesen n-Wannen können ebenfalls die PMOS-Transistoren eingebracht<br />
werden. NMOS-Transistoren werden in p-Wannen oder im Bereich der p-Epitaxie realisiert.<br />
S D D<br />
S<br />
<br />
<br />
<br />
<br />
<br />
p+ p+ n+ n+<br />
n-Wanne<br />
p-Wanne<br />
n + -Burried-Layer<br />
p - -Substrat<br />
B E<br />
C<br />
p n+<br />
n-Wanne<br />
n+<br />
Abbildung 6.61: BICMOS-Struktur<br />
Die CMOS-Strukturen werden zumeist zur Realisierung der Logikfunktionen genutzt; die bipolaren<br />
Transistoren finden ihren Einsatz bei der Realisierung von Treiberstufen. Diese können<br />
als statische oder dynamische Treiber aufgebaut werden. Bei dynamischen Treibern werden<br />
die bipolaren Transistoren nur während der Schaltflanken genutzt.<br />
Besonders vorteilhaft ist die BiCMOS-Technologie bei der Realisierung gemischt analog/digitaler<br />
Schaltungen. Der analoge Schaltungsteil wird dann in der Regel, wegen der ausgezeichneten<br />
Verstärkereigenschaft von bipolaren Transistoren, bipolar realisiert. Der digitale<br />
Schaltungsteil wird wegen des geringen Flächenaufwandes in CMOS realisiert. Wird hohe<br />
Treiberleistung gefordert, werden entsprechend BiCMOS-Treiber verwendet.<br />
Beispiel: Dynamische BiCMOS-Treiberstufe<br />
Abbildung 6.62 zeigt eine dynamische BiCMOS-Treiberstufe. Die Transistoren T2 und T4 sind<br />
stets leitend. Sie dienen als Widerstände. Damit bilden die Transistoren T1 und T3 einen<br />
CMOS-Inverter.<br />
Im stationären Zustand gilt:<br />
Vi ≈ 0: T3 gesperrt, T1 leitet ⇒ Vo ≈ VDD.<br />
VBE5 wird durch T2 kurzgeschlossen ⇒ T5 gesperrt.<br />
VBE6 wird durch T4 kurzgeschlossen ⇒ T6 gesperrt.<br />
Vi ≈ VDD: T3 leitet, T1 gesperrt ⇒ Vo ≈ 0.<br />
VBE5 wird durch T2 kurzgeschlossen ⇒ T5 gesperrt.<br />
VBE6 wird durch T4 kurzgeschlossen ⇒ T6 gesperrt.<br />
Prof. Dr.-Ing. R. Laur - 207 -<br />
ITEM
Kapitel 6: Digitale Schaltungstechnik Integrierte Schaltungen II<br />
Im stationären Zustand wirkt der BiCMOS-Inverter wie ein CMOS-Inverter.<br />
Verhalten im dynamischen Fall:<br />
Vi ↑: Vo(t=0) ≈ VDD,<br />
Vi ↓: Vo(t=0) ≈ 0<br />
T3 wird sofort leitend, T 1 wird sofort gesperrt, T 5 gesperrt,<br />
Am „Widerstand“ T4 baut sich die Basis-Emitterspannung für T6 auf ⇒ CL wird<br />
über T6 entladen, bis der Transistor wegen zu geringer Basis-Emitterspannung<br />
sperrt. CL wird danach über die Strecke T3 und T4 vollständig entladen.<br />
T1 wird sofort leitend, T3 wird sofort gesperrt, T 6 gesperrt,<br />
Am „Widerstand“ T2 baut sich die Basis-Emitterspannung für T5 auf ⇒ CL wird<br />
über T5 geladen, bis der Transistor wegen zu geringer Basis-Emitterspannung<br />
sperrt. CL wird danach über die Strecke T1 und T2 vollständig auf VDD geladen.<br />
Aufgrund der komplizierten dynamischen Vorgänge ist der effiziente Schaltungsentwurf nur<br />
über Schaltungssimulation möglich. T 1 und T4 werden üblicherweise als Minimaltransistoren<br />
realisiert. T5 und T6 sind so zu dimensionieren, daß möglichst kurze Einschwingzeiten beim<br />
Umschalten erreicht werden.<br />
Abbildung 6.62: BiCMOS-Inverter<br />
V i<br />
T 1<br />
T 3<br />
T 2<br />
T 4<br />
Prof. Dr.-Ing. R. Laur - 208 -<br />
ITEM<br />
V DD<br />
T 5<br />
T 6<br />
C L<br />
V o
Kapitel 6: Digitale Schaltungstechnik Integrierte Schaltungen II<br />
6.7 Rückgekoppelte digitale Grundschaltungen<br />
Im folgenden werden Kippschaltungen und Schmitt-Trigger betrachtet. Monostabile Kippschaltungen<br />
besitzen einen stabilen und einen instabilen Zustand. Durch ein geeignetes Eingangssignal<br />
werden sie in den instabilen Zustand versetzt. Aus dem instabilen Zustand kehren<br />
sie nach einer definierten Zeit in den stabilen Zustand zurück und dienen so zur Erzeugung<br />
von Impulsen definierter Zeitdauer. Bistabile Kippschaltungen (Flipflop, Latch) haben zwei<br />
stabile Arbeitspunkte, die bis zum Abschalten der Betriebsspannung eingehalten werden. Sie<br />
können durch geeignete Eingangssignale gesetzt oder rückgesetzt werden und dienen als digitales<br />
Speicherelement. Astabile Kippschaltungen haben zwei instabile Zustände. Nach einer<br />
definierten Zeit erfolgt ein Übergang zum jeweils anderen Zustand. Sie dienen als Oszillatoren<br />
zur Erzeugung periodischer Vorgänge, z.B. von Takten. Allen Kippschaltungen ist das<br />
Prinzip der (positiven) Rückkopplung der Ausgangsgröße auf den Eingang gemeinsam. Beim<br />
Schmitt-Trigger wird durch Rückkopplung erreicht, daß die Ausgangsspannung als Funktion<br />
der Eingangsspannung ein ausgeprägtes Hystereseverhalten zeigt.<br />
vi bistabil vo vi monostabil vo astabil vo Abbildung 6.63: Kippschaltungen<br />
6.7.1 Flipflop, Latch<br />
Abbildung 6.64 zeigt zwei kreuzverschaltete Inverter sowie die Übertragungscharakteristiken<br />
unter Verschaltungsbedingungen. Es ergeben sich drei Arbeitspunkte, wobei der Arbeitspunkt<br />
im Übergangsbereich instabil ist, da eine kleine Störung auf einer Eingangsspannung, wegen<br />
der hohen Verstärkung, zu großen Änderungen der Ausgangsspannung führt. Wegen der<br />
Rückkopplung führt dies zu einem Übergang in einen der beiden stabilen Arbeitspunkte. Der<br />
jeweilige stabile Zustand steht negiert und nicht-negiert an beiden Ausgängen zur Verfügung.<br />
v i1<br />
v i2<br />
=1<br />
v o1<br />
Q<br />
=1 Q<br />
v o2<br />
Abbildung 6.64: Kippschaltungen<br />
v o1<br />
v i2<br />
instabil<br />
Durch Verwendung von NOR- oder NAND-Gattern statt der Inverter, können die stabilen Zustände<br />
durch geeignete Signale an den Eingängen eingestellt werden. Das Flipflop (FF) kann<br />
gesetzt bzw. rückgesetzt werden (SR-Flipflop).<br />
Abbildung 6.64 zeigt links ein SR-FF in NOR-Technik. Tabelle 6.2 zeigt die zugehörige<br />
Wahrheistabelle. Sind beide Eingänge im Zustand 1, bleibt der aktuell stabile Zustand erhal-<br />
Prof. Dr.-Ing. R. Laur - 209 -<br />
ITEM<br />
stabil<br />
v i1<br />
v o2
Kapitel 6: Digitale Schaltungstechnik Integrierte Schaltungen II<br />
ten. Wird S = 1 , R = 0 wird das Flipflop gesetzt, unabhängig vom bisherigen Zustand. Für<br />
S = 0 , R = 1wird<br />
das Flipflop entsprechend rückgesetzt. Sind beide Eingänge im Zustand 1, ist<br />
dies ein nicht sinnvoller Zustand, da beide Ausgänge den identischen Zustand 1 erhalten. Der<br />
Zustand des FF danach hängt von der Reihenfolge ab, in der sich die Eingangszustände ändern.<br />
S<br />
R<br />
≥1<br />
≥1<br />
Abbildung 6.65: SR-Flipflops mit Schaltsymbol<br />
Q<br />
Q<br />
S<br />
R<br />
S R Q n+<br />
1<br />
Q<br />
Q<br />
Q n+<br />
1<br />
1 1 0 0<br />
1 0 1 0<br />
0 1 0 1<br />
0 0 n Q<br />
Tabelle 6.2 SR-Flipflop in NOR Technik<br />
S R Q n+<br />
1<br />
1 1 n Q Q n<br />
1 0 1 0<br />
0 1 0 1<br />
0 0 1 1<br />
Tabelle 6.3: Wahrheitstabelle des FF in NAND-Technik<br />
Sind bei der NAND-Realisierung beide Eingänge im Zustand 1, bleibt der aktuell stabile Zustand<br />
erhalten (s. Tabelle 6.3). Wird S = 1 , R = 0 wird das Flipflop gesetzt, unabhängig vom<br />
bisherigen Zustand. Für S = 0 , R = 1wird<br />
das Flipflop entsprechend rückgesetzt. Sind beide<br />
Eingänge im Zustand 0 ist dies ein nicht sinnvoller Zustand.<br />
Setz- und Rücksetzimpulse müssen eine minimale Zeitdauer haben, sonst wirken sie sich<br />
nicht aus. Unter Bezug auf die NOR-Realisierung zeigt sich, daß sich der Setzimpuls erst<br />
nach t pHL am Ausgang Q auswirkt. Danach wird eine weitere Verzögerungszeit t pLH benötigt,<br />
bis die Reaktion am Ausgang Q auftritt. Für die Breite des Setzimpulses muß demnach<br />
gelten:<br />
t > t + t = t<br />
S min<br />
pHL<br />
pLH<br />
p<br />
.<br />
Q n<br />
Q n+<br />
1<br />
Entsprechendes gilt für den Rücksetzimpuls.<br />
Abbildung 6.28 zeigt eine CMOS-Realisierung eines RS-Flipflops in NOR-Technik.<br />
Prof. Dr.-Ing. R. Laur - 210 -<br />
ITEM<br />
R<br />
S<br />
&<br />
&<br />
Q<br />
Q
Kapitel 6: Digitale Schaltungstechnik Integrierte Schaltungen II<br />
Q<br />
V DD<br />
S R<br />
Abbildung 6.66: CMOS RS-Flipflop in NOR-Realisierung<br />
K<br />
T<br />
J<br />
Abbildung 6.67: Getaktetes JK-Flipflop<br />
&<br />
&<br />
J K Q n+<br />
1 Q n+<br />
1<br />
0 0 n Q Q n<br />
1 0 1 0<br />
0 1 0 1<br />
1 1 Q n<br />
n Q<br />
Tabelle 6.4: Wahrheitstabelle des JK-FF<br />
Abbildung 6.67 zeigt ein taktgesteuertes JK-Flipflop; Tabelle 6.2 zeigt die zugehörige Wahrheitstabelle.<br />
Die Eingangssignale wirken sich lediglich im Taktzustand 1 aus. Damit sich der<br />
FF-Zustand nicht mehrfach ändert, muß die Dauer des Taktpulses zeitlich begrenzt sein. Die<br />
Invertierung des FF-Zustands für J=K=1 ermöglicht die Realisierung von Frequenzteilern und<br />
Zählern.<br />
Abbildung 6.68 zeigt ein D-FF, das im Taktzustand 1 den Zustand am Eingang D übernimmt.<br />
Prof. Dr.-Ing. R. Laur - 211 -<br />
ITEM<br />
F<br />
S<br />
R<br />
Q<br />
Q<br />
Q
Kapitel 6: Digitale Schaltungstechnik Integrierte Schaltungen II<br />
Abbildung 6.68: D-Flipflop<br />
D<br />
T<br />
D =1<br />
T<br />
=1<br />
&<br />
&<br />
S<br />
R<br />
&<br />
&<br />
=1<br />
QM QS QM QS S<br />
Q<br />
R Q<br />
Abbildung 6.69: Taktflankengesteuertes D-FF<br />
Abbildung 6.69 zeigt ein taktflankengesteuertes D-Master-Slave-FF. Im Taktzustand 1 wird<br />
der aktuelle Zustand des Eingangs D in das Master-FF übernommen. Änderungen des Eingangs<br />
während des Taktzustandes wirken sich auf das Master-FF aus. Mit der fallenden Flanke<br />
des Taktes wird der Zustand des Master-FFs festgehalten und in das Slave-FF übernommen.<br />
Nach der steigenden Flanke des Taktes bleibt der Zustand des Slave-FFs, unabhängig<br />
vom Master, unverändert. Ein FF mit identischer Funktion, allerdings realisiert mit Transmission-Gates<br />
zeigt Abbildung 6.70.<br />
D<br />
C<br />
C<br />
Abbildung 6.70: D-Master-Slave-FF mit Transmission-Gates<br />
=1<br />
C<br />
C<br />
=1<br />
6.7.2 Monostabile Kippstufe, Monoflop<br />
Monostabile Kippstufen erzeugen aus einem kurzen Triggerimpuls einen Impuls definierter<br />
Zeitdauer, dessen Dauer durch die Zeitkonstanten der Schaltung festgelegt wird. Abbildung<br />
6.71 zeigt die Gatterrealisierung einer monostabilen Kippstufe (Monoflop). Im Ruhezustand<br />
gilt V i2<br />
= VDD<br />
und damit Vo = 0 und V o1<br />
= VDD<br />
. Der Kondensator ist ungeladen. Durch einen<br />
kurzen, positiven Impuls am Eingang geht der Ausgang des NOR-Gatters in den Zustand 0.<br />
Da der Kondensator zunächst ungeladen ist, folgt V V und der Ausgang der Schaltung geht<br />
C<br />
C<br />
i2 o1<br />
Prof. Dr.-Ing. R. Laur - 212 -<br />
ITEM<br />
=1<br />
C<br />
C<br />
&<br />
&<br />
=1<br />
S<br />
R<br />
Q<br />
Q<br />
Q S<br />
Q S
Kapitel 6: Digitale Schaltungstechnik Integrierte Schaltungen II<br />
in den Zustand 1. Über den Widerstand R wird der Kondensator aufgeladen. Wenn V i2<br />
die<br />
Schwellenspannung des Inverters erreicht, geht der Ausgang in den Nullzustand. Der Ausgang<br />
des NOR-Gatters geht in den 1-Zustand und der Kondensator wird über R entladen. Die<br />
Pulsdauer ist proportional zur Zeitkonstanten des RC-Gliedes:<br />
T ≈ 0 . 7⋅<br />
RC .<br />
Die Spannung V i2 erreicht einen Maximalwert von V i1max<br />
≈1. 5⋅V<br />
DD . Eine nächste Triggerung<br />
ist erst wieder möglich, wenn V teilweise entladen ist.<br />
V i<br />
V o1<br />
V i2<br />
V o<br />
V i<br />
≥1<br />
i2<br />
V o1<br />
Abbildung 6.71: Monostabile Kippstufe<br />
C<br />
T<br />
V DD<br />
R<br />
V i2<br />
Prof. Dr.-Ing. R. Laur - 213 -<br />
ITEM<br />
=1<br />
V o<br />
t<br />
t<br />
t<br />
t
Kapitel 6: Digitale Schaltungstechnik Integrierte Schaltungen II<br />
6.7.3 Astabile Schaltungen<br />
Astabile Schaltungen zeichnen sich durch eine Folge kurzzeitig stabiler Zustände aus. Die<br />
Zeitdauer der Zustände wird durch die Zeitkonstanten der Schaltung bestimmt. Die Schaltungen<br />
erzeugen regelmäßige Impulsfolgen. Sie werden als Taktgeneratoren oder Oszillatoren<br />
verwendet.<br />
Eine einfache astabile Schaltung stellt der Ringoszillator dar. Eine Kette von n Invertern wird<br />
zu einem Ring verschaltet. Ist n ungerade, existiert kein stationärer Zustand. Jede Taktflanke<br />
wird von jedem Inverter um t pHL bzw. um t pLH verzögert. Insgesamt ergibt sich damit für die<br />
Periodendauer des Taktes: T = n⋅ ( t pHL + t pLH ) = n⋅<br />
t p . Abbildung 6.72 zeigt einen Ringoszillator,<br />
dem zur Signalformung ein Inverter nachgeschaltet ist. Die Anzahl der Inverter in der<br />
rückgekoppelten Inverterkette muß ungerade sein. Der erste Inverter kann gemäß Abbildung<br />
als NAND-Gatter ausgeführt werden. Mit einem 1-Signal am Eingang E kann der<br />
Ringoszillator gestartet werden.<br />
E<br />
&<br />
=1<br />
Abbildung 6.72: Ringoszillator<br />
=1<br />
n=2m+1<br />
=1<br />
Abbildung 6.73 zeigt einen astabilen Multivibrator mit den entsprechenden Impulsdiagrammen.<br />
Der Kondensator C wird über den Widerstand R entweder aufgeladen oder entladen. In<br />
der Abbildung wird für t=0 angenommen, daß der Kondensator in Richtung Betriebsspannung<br />
aufgeladen wird, und daß die Eingangsspannung des ersten Gatters die Schwellenspannung<br />
noch nicht erreicht hat. Es gilt daher V 2 ≈ VDD<br />
und V o ≈ 0 , was die Annahme bestätigt. Erreicht<br />
V1<br />
die Schwellenspannung, schalten beide Inverter. Der Kondensator ist auf<br />
VC ≈ 0. 5⋅V DD geladen. Nach dem Schalten gilt V o VDD<br />
und damit V . Der Kondensator<br />
wird jetzt entladen, d.h. die Spannung V geht exponentiell gegen 0. Wird dabei die<br />
Schwellenspannung des ersten Inverters unterschritten, schaltet der Multivibrator in entgegengesetzter<br />
Richtung. Für die Spannung V 1 gilt demnach − . Die<br />
Taktfrequenz wird durch die Zeitkonstante des RC-Glieds festgelegt und es gilt:<br />
≈<br />
1 ≈1. 5⋅V<br />
DD<br />
1<br />
0.<br />
5⋅V<br />
DD ≤ V1<br />
≤1.<br />
5⋅V<br />
DD<br />
f T<br />
0.<br />
45<br />
≈ ,<br />
R ⋅C<br />
vorausgesetzt, die Zeitkonstante ist deutlich größer als die Verzögerungszeit der Gatter.<br />
Der Multivibrator kann am Ausgang mit einem Inverter zur Impulsformung beschaltet werden.<br />
Außerdem kann der erste Inverter als NAND-Gatter realisiert werden. Mit dem zusätzlichen<br />
Eingang kann der Takt ein- und ausgeschaltet werden.<br />
Prof. Dr.-Ing. R. Laur - 214 -<br />
ITEM<br />
=1<br />
=1
Kapitel 6: Digitale Schaltungstechnik Integrierte Schaltungen II<br />
V 1<br />
V 2<br />
V o<br />
V 1<br />
=1 ≥1<br />
V 2<br />
=1<br />
R C<br />
Abbildung 6.73: Astabiler Multivibrator<br />
Mit Hilfe eines Multivibrators können Ladungspumpen angetrieben werden, die auf dem Chip<br />
Spannungen größer als die Betriebsspannung oder kleiner als die Bezugsspannung erzeugen.<br />
Abbildung 6.74 zeigt das Prinzip einer Ladungspumpe, wie sie zur Erzeugung einer negativen<br />
Substratspannung verwendet werden kann. Die beiden Transistoren sind als Dioden geschaltet.<br />
Sie leiten lediglich für V S > V D + VTp<br />
bzw. V S −V<br />
D > VTp<br />
. Durch einen LH-Übergang am<br />
Ausgang des Inverters wird V positiv und M1 leitet, bis V ≈ V . Der Kondensator C wird<br />
1 1 Tp<br />
1<br />
DD Tp V − 1<br />
etwa auf die Spannung V geladen. Beim HL-Übergang bleibt die Ladung von C im<br />
Schaltaugenblick erhalten, und für V gilt zunächst<br />
V V + − ≈ V . Damit sperrt M1 und M2<br />
1 1 DD Tp<br />
wird leitend. Der Knoten Vo wird entladen, d.h. auf der oberen „Platte“ des Kondensators C o<br />
wird negative Ladung angesammelt. Beim nächsten LH-Übergang sperrt M2 und die Ladung<br />
auf Co wird gehalten. Der stationäre Endwert der Ausgangsspannung V o min ≈ −VDD<br />
+ 2⋅<br />
VTp<br />
wird erst nach mehreren Oszillationen schrittweise erreicht. Wenn der Ausgang belastet ist,<br />
wird der Ausgangskondensator entladen, während M2 gesperrt ist. Die Ausgangsspannung ist<br />
damit mit einer periodischen Spannung überlagert. Der Mittelwert der Ausgangsspannung ist<br />
höher als der o.a. Minimalwert. Das dynamische Verhalten der Ladungspumpe hängt vom<br />
Verhältnis der Kapazitäten der Kondensatoren und von der anliegenden Last ab. Die Schaltung<br />
muß mit PMOS-Transistoren realisiert werden. Source und Drain von M2 sowie Source<br />
von M1 werden deutlich negativer als die Bezugsspannung. Würden NMOS-Transistoren<br />
verwendet, würden die entsprechenden Substratdioden leitend.<br />
Prof. Dr.-Ing. R. Laur - 215 -<br />
ITEM<br />
t<br />
t<br />
t<br />
V o<br />
V C
Kapitel 6: Digitale Schaltungstechnik Integrierte Schaltungen II<br />
Multivibrator =1<br />
C 1<br />
V 1<br />
S<br />
D<br />
M1<br />
V SS=0<br />
D S<br />
M2<br />
C o<br />
V o
Kapitel 6: Digitale Schaltungstechnik Integrierte Schaltungen II<br />
V i<br />
V SHL<br />
V SLH<br />
V o<br />
Abbildung 6.76: Regenerierung digitaler Signale mittels eines Schmitt-Triggers<br />
V i<br />
V DD<br />
M4<br />
M3<br />
M2<br />
V1<br />
M1<br />
Abbildung 6.77: CMOS-Schmitt-Trigger<br />
Abbildung 6.77 zeigt einen CMOS-Schmitt-Trigger. Zunächst sei der Ausgang im H-Zustand,<br />
der Eingang im L-Zustand. Die Transistoren M1, M2 und M6 sperren; die Transistoren M3,<br />
M4, M5 leiten. Der Knoten zwischen M1 und M2 wird durch M5 auf V DD Tn gehalten.<br />
Steigt die Eingangsspannung, wird zunächst M1 leitend. M5 und M1 bilden einen Spannungsteiler,<br />
mit dem die Spannung des Knotens zwischen M1 und M2 bestimmt wird. Wird diese<br />
Spannung von der Eingangsspannung um V überschritten, wird M2 leitend und die Aus-<br />
V V − ≈ 1<br />
Tn<br />
Prof. Dr.-Ing. R. Laur - 217 -<br />
ITEM<br />
M6<br />
M5<br />
V DD<br />
Vo<br />
t<br />
t
Kapitel 6: Digitale Schaltungstechnik Integrierte Schaltungen II<br />
gangsspannung wird verringert. M5 wird dadurch weniger leitfähig. Dies verringert zusätzlich<br />
V1<br />
, wodurch M2 stärker leitend wird. Die positive Rückkopplung beschleunigt den Umschaltvorgang.<br />
Mit steigender Eingangsspannung werden M3, M4 gesperrt, während M6 leitend<br />
wird.<br />
Der LH-Übergang erfolgt entsprechend zum HL-Übergang. In beiden Fällen wird die Schaltschwelle<br />
durch die Rückkopplung sehr exakt festgelegt.<br />
Die Schwellenspannung V SHL ergibt sich zu:<br />
V ≈ V + V .<br />
SHL<br />
1 Tn2<br />
M1 und M5 bestimmen V 1 . Sie sind in Sättigung und führen den gleichen Strom:<br />
β5<br />
2 β1<br />
2<br />
( VDD −V1<br />
−VTn5<br />
) = ( VSHL<br />
−VTn1)<br />
.<br />
2<br />
2<br />
Da bei den Transistoren M2 und M5 die Sources an den gleichen Knoten liegen, ist der Einfluß<br />
des Body-Effekts auf beide Transistoren identisch und die Schwellenspannungen sind<br />
identisch:<br />
V = V .<br />
Tn5<br />
Tn2<br />
Damit folgt:<br />
β5<br />
2 β1<br />
2<br />
( VDD −VSHL<br />
) = ( VSHL<br />
−VTn1)<br />
.<br />
2<br />
2<br />
Mit vorgegebener Schwellenspannung V SHL kann damit das Weiten-Längenverhältnis der<br />
Transistoren M1 und M5 bestimmt werden:<br />
β5<br />
W5<br />
⋅ L1<br />
VSHL<br />
−VTn<br />
2<br />
= = ( ) .<br />
β W ⋅ L V −V<br />
1<br />
1<br />
5<br />
DD<br />
Entsprechend folgt für die Schwellenspannung V :<br />
SLH<br />
β<br />
β<br />
W ⋅ L<br />
V<br />
−V<br />
SHL<br />
− V<br />
6 6 4 DD SLH Tp 2<br />
= = (<br />
)<br />
4 W4<br />
⋅ L6<br />
VSLH<br />
.<br />
Die Transistoren M2 und M3 sind Schalttransistoren und müssen deutlich breiter als M1 und<br />
M4 dimensioniert werden.<br />
Mit V = 5 , V ≈ V ≈ 0,<br />
8V<br />
und der Forderung V = 2 , V = 3V<br />
, womit eine Hy-<br />
DD<br />
V Tn Tp<br />
V SHL<br />
sterese von 1V erreicht wird, folgt:<br />
β5<br />
W5<br />
⋅ L1<br />
2.<br />
2 2 β 6 W6<br />
⋅ L4<br />
2.<br />
2V<br />
2<br />
= = ( ) = 1.<br />
21,<br />
= = ( ) = 1.<br />
21.<br />
β W ⋅ L 2V<br />
β W ⋅ L 2<br />
1<br />
1<br />
5<br />
4<br />
4<br />
Abbildung 6.78 zeigt als Anwendung eines Schmitt-Triggers einen Taktgenerator. Der Kondensator<br />
wird zwischen den Spannungen V SHL und V SLH umgeladen. Die Periodendauer ist<br />
durch die beiden Schwellenspannungen und durch die Zeitkonstante des RC-Glieds festgelegt.<br />
Sind die beiden Schwellenspannungen symmetrisch zur Versorgungsspannung, ergibt<br />
sich ein symmetrischer Takt. Taktfrequenz und Duty-Cycle des Taktes können mittels eines<br />
Schmitt-Triggers wesentlich exakter eingestellt werden, als bei Taktgeneratoren in Multivibratorschaltung.<br />
Prof. Dr.-Ing. R. Laur - 218 -<br />
ITEM<br />
6<br />
SLH
Kapitel 6: Digitale Schaltungstechnik Integrierte Schaltungen II<br />
V i<br />
C<br />
R<br />
V o<br />
V SLH<br />
V SHL<br />
Prof. Dr.-Ing. R. Laur - 219 -<br />
ITEM<br />
V DD<br />
Abbildung 6.78: Taktgenerator mit Schmitt-Trigger<br />
V i<br />
V o<br />
t<br />
t
Kapitel 6: Digitale Schaltungstechnik Integrierte Schaltungen II<br />
Vorläufige unkorrigierte und unvollständige Version<br />
7 Zeitdiskrete Analogschaltungen<br />
Die Abtastung analoger Signale und die Verarbeitung der abgetasteten Signale bieten eine<br />
Vielfalt an Möglichkeiten der Signalverarbeitung, die durch die konventionelle analoge<br />
Schaltungstechnik nicht realisiert werden können. Abbildung 8.1 zeigt ein analoges Signal,<br />
dessen Wert zum Zeitpunkt der skizzierten periodischen Abtastimpulse festgehalten und bis<br />
zum nächsten Abtastimpuls gespeichert wird. Diese Funktion wird als "Abtasten und Halten<br />
(Sample & Hold)" bezeichnet. Das resultierende abgetastete Signal ist im unteren Teil der<br />
Abbildung dargestellt. Ohne auf die Theorie der Abtastung einzugehen, ist offensichtlich, daß<br />
das abgetastete Signal mit zunehmender Abtastfrequenz dem analogen Ausgangssignal "ähnlicher"<br />
wird. Das Abtasttheorem von Shannon fordert eine Abtastfrequenz, die mindestens<br />
dem zweifachen der höchsten Frequenz des abzutastenden Signals entspricht:<br />
f T<br />
V (t)<br />
Vi ≥ 2⋅ f .<br />
max<br />
t i<br />
V i<br />
t i+1<br />
V i+1<br />
Abbildung 8.1: Abgetastetes analoges Signal.<br />
Die Diskretisierung des abgetasteten Signals, und die Wandlung in eine digitale numerische<br />
Darstellung ermöglichen die Anwendung leistungsfähiger Verfahren der digitalen Signalverarbeitung<br />
und der digitalen Signalübertragung. Danach erfolgt eine Rückwandlung in ein<br />
analoges Signal. Wesentliche Komponenten in dieser Verarbeitungskette sind Analogschalter,<br />
Schalter-Kondensator-Schaltungen, Sample&Hold-Schaltungen, Analog-Digitalwandler<br />
(A/D) und Digital-Analogwandler (D/A).<br />
Prof. Dr.-Ing. R. Laur - 171 -<br />
ITEM<br />
t
Kapitel 6: Digitale Schaltungstechnik Integrierte Schaltungen II<br />
7.1 Analogschalter<br />
Pass-Transistoren oder Transmission-Gates können, wie im Fall dynamischer Digitalschaltungen,<br />
zum Schalten auch analoger Signale verwendet werden (s. Abbildung 8.2). Wie bei<br />
den digitalen Schaltern, ergibt sich als Nachteil der Pass-Transistoren, der Schwellenspannungsabfall<br />
zwischen Drain und Source im eingeschalteten Zustand. Beim PMOS-Schalter<br />
ergibt sich bei V A = 0 am Knoten B: B TP V ≥ V . Beim NMOS-Schalter folgt für V A DD ,<br />
. Durch die Parallelschaltung beider Schalter im Fall des CMOS-Schalters wird<br />
dieser Nachteil vermieden. Voraussetzung dafür ist allerdings, daß gilt.<br />
V =<br />
VB ≤ VDD<br />
−VTN<br />
V > V + V<br />
A<br />
A<br />
V DD<br />
0<br />
C<br />
0<br />
C<br />
V DD<br />
B<br />
B<br />
C T<br />
C T<br />
DD TN TP<br />
A B<br />
Abbildung 8.2: MOS-Analogschalter<br />
Beim Einschalten der Analogschalter ergibt sich nach Abschluß des Ausgleichsvorgangs in<br />
allen Fällen V B A . Der Kleinsignal-Widerstand zwischen den Klemmen A und B im eingeschalteten<br />
Zustand wird als On-Widerstand bezeichnet. Für den NMOS-Schalter folgt:<br />
V ≈<br />
r<br />
Non<br />
= 1<br />
dV<br />
dI<br />
DS<br />
D<br />
V<br />
DS<br />
= 0<br />
1<br />
=<br />
β ( V −V<br />
N<br />
GS<br />
TN<br />
=<br />
) β<br />
Für den PMOS-Schalter gilt entsprechend:<br />
r<br />
Pon<br />
=<br />
β<br />
P<br />
1<br />
( −V<br />
− V<br />
GS<br />
TP<br />
=<br />
) β<br />
P<br />
1<br />
( V − V<br />
A<br />
TP<br />
)<br />
N<br />
( V<br />
DD<br />
1<br />
−V<br />
A<br />
−V<br />
für A TP V > V .<br />
TN<br />
)<br />
C<br />
C<br />
für V < V −V<br />
.<br />
Beim CMOS-Schalter sind die beiden On-Widerstände parallelgeschaltet.<br />
r<br />
r<br />
⋅ r<br />
Non Pon<br />
Con = .<br />
rNon<br />
+ rPon<br />
Abbildung 8.3 zeigt den Verlauf der On-Widerstände als Funktion der geschalteten Spannung.<br />
Der PMOS Schalter sperrt für Spannungen, die kleiner als der Betrag der Schwellenspannung<br />
sind ( A TP V < V ). Der NMOS-Schalter sperrt entsprechend für V A ≥ VDD −VTN<br />
. Der<br />
CMOS Schalter kann Spannungen im gesamten Bereich der Betriebsspannung schalten. Zusätzlich<br />
ist der On-Widerstand deutlich geringer als derjenige der anderen Schalter.<br />
Prof. Dr.-Ing. R. Laur - 172 -<br />
ITEM<br />
A<br />
DD<br />
Tn<br />
C T
Kapitel 6: Digitale Schaltungstechnik Integrierte Schaltungen II<br />
Abbildung 8.3: On-Widerstände der Analogschalter<br />
Probleme der Schalter<br />
- Ladungsinjektion (Charge Injection):<br />
Beim Abschalten des Schalters muß Gate-Ladung abgebaut werden. Entlädt Lastkapazität und<br />
verändert die Ausgangsspannung<br />
1 C' ox⋅w⋅l⋅( VGS−VTS ) 1 C' ox⋅w⋅l⋅( VDD−vin −VTS<br />
)<br />
∆vload ≈− ⋅ =− ⋅<br />
(7.1)<br />
2 C 2 C<br />
load load<br />
Wegen VTS = f ( VSB) = f( vin−VB) ist ∆vload<br />
eine nichtlineare Funktion von der Eingangsspannung.<br />
-> Nichtlineare Verzerrungen!<br />
- Kapazitive Spannungsteilung des Taktes (Clock Feedthroug):<br />
Beim Ausschalten des Taktes, Spannungsteilung zwischen Gate-Drain-Kapazität und Lastkapazität,<br />
die die Ausgangsspannung gegenüber der Eingangsspannung verändert.<br />
Prof. Dr.-Ing. R. Laur - 173 -<br />
ITEM
Kapitel 6: Digitale Schaltungstechnik Integrierte Schaltungen II<br />
Beide Effekte werden bei CMOS-Schaltern verringert (entgegengesetzte Takte) jedoch wegen<br />
der unterschiedlichen Flächen von PMOS- und NMOS-Transistor nicht kompensiert. Durch<br />
zufügen eines „Dummy“-Schalters mit entgegengesetztem Takt und Kurzschluß zwischen<br />
Source und Drain, können die Effekte weiter reduziert werden.<br />
Bei vollständig differentieller Ausführung der Schaltung werden die Effekte in erster Ordnung<br />
kompensiert, weil sie als Gleichtaktsignal auftreten, das vom CMRR des Differenzverstärkers<br />
kompensiert wird. Die nichtlinearen Effekte wirken sich jedoch als Gegentaktsignal<br />
aus und werden verstärkt.<br />
7.2 Abtast-Halte-Schaltungen (Sample-and-Hold)<br />
Diese Schaltungen tasten ein Eingangssignal zu einem bestimmten Zeitpunkt ab und halten<br />
diese Spannung bis zum nächsten Abtastimpuls.<br />
Prof. Dr.-Ing. R. Laur - 174 -<br />
ITEM
Kapitel 6: Digitale Schaltungstechnik Integrierte Schaltungen II<br />
Mit dem Abtastimpuls wird der Halte-Kondensator auf die Eingangsspannung aufgeladen.<br />
Danach hält der Kondensator die Ladung wegen der hohen Eingangsimpedanz des Verstärkers,<br />
der als Spannungsfolger geschaltet ist. Der Ausgang kann wegen der niedrigen Ausgangsimpedanz<br />
des Verstärkers hinreichend belastet werden, ohne Rückwirkung auf die gespeicherte<br />
Ladung des Haltekondensators.<br />
Eine verbesserte S&H-Schaltung zeigt die folgende Abbildung:<br />
Der Verstärker A1 puffert jetzt zusätzlich die Eingangsspannung, d.h. der Kondensator wird<br />
nicht von der vorherigen Stufe geladen. Im Sample-Modus sind S1 und S3 geschlossen, während<br />
S2 geöffnet ist. Im Halte-Modus ist S2 geschlossen, wodurch der Ausgang von A1 weiter<br />
dem Eingang folgt. A1 wird damit nicht mit „offener Schleifenverstärkung“ betrieben. Der<br />
Ausgang geht also nicht zur Versorgungsspannung.<br />
7.3 Schalter-Kondensator-Schaltungen (Switched-Capacitor, SC)<br />
Problem großer Widerstände ( M Ω ) bei IC. Die SC-Schaltung in der folgenden Abbildung<br />
wird mit nicht-überlappenden Takten betrieben. Wenn S1 geschlossen ist beträgt die Ladung<br />
auf dem Kondensator q1 = C ⋅v1. Entsprechend gilt q2 = C⋅v2. Wenn beide Spannungen ungleich<br />
sind, ergibt sich ein Ladungsfluß q1− q2<br />
= C( v1−v2) pro Taktintervall T. Im Mittel<br />
fließt ein Strom<br />
Cv ( 1−v2) v1−v2 I = mit (7.2)<br />
T R<br />
Prof. Dr.-Ing. R. Laur - 175 -<br />
ITEM<br />
SC
Kapitel 6: Digitale Schaltungstechnik Integrierte Schaltungen II<br />
R<br />
SC<br />
T 1<br />
= = .<br />
C f ⋅C<br />
Die Schaltung verhält sich wie ein Widerstand und es können sehr große Widerstandswerte<br />
realisiert werden. Allerdings wirken sich die Streuungen der Kapazität (-20%) und die<br />
parasitären Kapazitäten auf den Widerstand aus. Die beiden Takte sind nicht-überlappend.<br />
Beim Takt Φ1 wird der Kondensator auf uC= v1aufgeladen.<br />
Mit Takt 2 ergibt sich<br />
. Die transportierte Ladung pro Taktperiode<br />
Φ<br />
uC=−v2 Das nächste Bild zeigt ein RC-Glied, das mit einer SC-Schaltung realisiert ist.<br />
Für die Zeitkonstante folgt:<br />
C<br />
τ= ⋅ = ⋅ . (7.3)<br />
2 RC2 f<br />
C1<br />
Prof. Dr.-Ing. R. Laur - 176 -<br />
ITEM
Kapitel 6: Digitale Schaltungstechnik Integrierte Schaltungen II<br />
Obwohl Kapazitäten in integrierten Schaltungen hohe Toleranzen aufweisen, ist das Kapazitätsverhältnis<br />
wegen des Trackings sehr genau.<br />
Die Kondensatoren werden sinnvollerweise aus kleinen Einheitszellen von z.B. 100fF zusammengesetzt.<br />
Damit ist gewährleistet, daß die Verhältnisse der parasitären Randkapazitäten<br />
zu den Flächenkapazitäten unabhängig von der Kapazität ist:<br />
Ein alternativer SC-Widerstand ist in nachfolgendem Bild gezeigt:<br />
v 1<br />
i 1<br />
F 1<br />
S 1<br />
F 2<br />
S 2<br />
u C<br />
C<br />
S 4<br />
Mit dem ersten Taktsignal wird der Kondensator auf q1 = C⋅v1. Das zweite Taktsignal lädt<br />
den Kondensator auf q2 =−C⋅v2, d.h. im zweiten Taktintervall fließt die Ladung q 2 − q1<br />
vom<br />
Knoten 2 auf den Kondensator. Im folgenden ersten Taktintervall fließt entsprechend die Ladung<br />
q1−q2 vom Knoten 1 zum Kondensator. Gemittelt über das Taktintervall ergibt sich<br />
damit:<br />
F 1<br />
F 2<br />
S 3<br />
q1−q2 u1−u2 i1 = i2 = = C⋅ f ⋅( u1− u2)<br />
= . (7.4)<br />
T R<br />
Es handelt sich demnach um einen SC-Widerstand. Der Vorteil dieser gegenüber der vorherigen<br />
Schaltung besteht darin, daß die parasitären Kapazitäten, d.h. die Teilkapazitäten der Plat-<br />
Prof. Dr.-Ing. R. Laur - 177 -<br />
ITEM<br />
SC<br />
i 2<br />
v 2
Kapitel 6: Digitale Schaltungstechnik Integrierte Schaltungen II<br />
ten gegen Bezugspotential (parallel zu Schaltern 2 und 4) sich nicht auswirken. Die rechte parasitäre<br />
Kapazität liegt entweder an der virtuellen Masse oder wird durch Schalter 4 kurzgeschlossen.<br />
Sie wird nicht aufgeladen und bewirkt demnach nichts. Die linke parasitäre Kapazität<br />
wird zwar über Schalter 1 aufgeladen, wird dann aber über Schalter 2 entladen. Demnach<br />
ergibt sich kein Stromfluß von Eingang zu Ausgang, d.h. der SC-Widerstand wird nicht beeinflußt.<br />
Sie wirkt sich allerdings wie ein parasitärer Lastwiderstand aus, der den Eingang zusätzlich<br />
belastet.<br />
In der folgenden Abbildung ist mit diesem SC-Widerstand ein SC-Integrator mit seinem analogen<br />
Äquivalent gezeigt:<br />
v C<br />
Die Transferfunktion der Schaltung ergibt sich zu<br />
Vout 1/ jωCF = =<br />
Vin RSC<br />
1<br />
CF<br />
jω( C<br />
,<br />
1<br />
⋅ )<br />
f<br />
(7.5)<br />
wobei wieder in idealer Weise das Kapazitätsverhältnis genutzt wird.<br />
Durch einfachen Austausch der Takte an S1, S2 und S4 ergibt sich ein invertierender Integrator.<br />
Die nächste Abbildung zeigt oben einen aus dem nichtinvertierenden Integrator abgeleiteten<br />
summierenden Integrator. Eine Vielzahl der dort dargestellten Schalter ist redundant und kann<br />
gemäß unterem Bild zusammengefaßt werden. Zusätzlich enthält die Schaltung einen Schalter<br />
zum Zurücksetzen der Integrationsvariablen. Da jede der SC-Schaltungen am Eingang einen<br />
Widerstand darstellt, ergibt sich für die Ausgangsspannung:<br />
Prof. Dr.-Ing. R. Laur - 178 -<br />
ITEM<br />
1
Kapitel 6: Digitale Schaltungstechnik Integrierte Schaltungen II<br />
v<br />
v v<br />
1 2<br />
3<br />
out = + +<br />
jωCFR1SC jωCFR2SC jωCFR3SC v<br />
. (7.6)<br />
Sollen Terme summiert werden, ist lediglich der oben angedeutete Austausch der Takte erforderlich.<br />
Noch problematischer als die Realisierung von Widerständen ist die Realisierung von Induktivitäten<br />
in integrierten Schaltungen. Spulen aus Leiterbahnen sind denkbar, allerdings ist der<br />
Flächenbedarf maximal und die realisierbaren Induktivitätswerte sind extrem klein. Mit aktiven<br />
Elementen (Verstärker) läßt sich allerdings auch das Verhalten von Induktivitäten nachbilden.<br />
Prof. Dr.-Ing. R. Laur - 179 -<br />
ITEM
Kapitel 6: Digitale Schaltungstechnik Integrierte Schaltungen II<br />
Die Abbildung zeigt ein RLC-Filter, das mit SC-Schaltungen nachgebildet werden soll. Spannung<br />
und Strom durch die Induktivität sind mit v 3,i3 bezeichnet. Mit Hilfe eines Widerstandes<br />
RS (üblicherweise 1 Ω ) wird eine Spannung v'3<br />
= i3⋅RS definiert. Die Kapazität C 2 kann<br />
jetzt wie folgt beschrieben werden:<br />
i2 1 vs<br />
v2<br />
v'3<br />
v 2 = = (i1− i 3)<br />
= − − . (7.7)<br />
jωC jωC jωC R jωC R jωC R<br />
2 2 2 1 2 1 2<br />
Dies entspricht allerdings einem summierenden Integrator, wie er in der folgenden Abbildung<br />
im oberen Bild dargestellt ist. Die Kapazitäten ergeben sich dabei zu:<br />
CF2 1 CF2<br />
CR 2 1 = ⋅ , CR 2 S = ⋅<br />
C f C f<br />
1 . (7.8)<br />
Für die Induktivität ergibt sich:<br />
v' R i<br />
21 22<br />
v v<br />
j L /R j L /R<br />
2<br />
4<br />
3 = S⋅ 3 = −<br />
ω 3 S ω 3<br />
S<br />
S<br />
. (7.9)<br />
Dies gibt wiederum einen summierenden Integrator gemäß mittlerem Bild in der folgenden<br />
Abbildung. Die Elemente ergeben sich damit zu<br />
L3 CF3<br />
= ⋅<br />
R C<br />
1<br />
. (7.10)<br />
f<br />
S 31<br />
Der Kondensator C 4 wird beschrieben mit:<br />
1<br />
v 4 =<br />
jωC v's (i3 − i 5)<br />
=<br />
jωC R<br />
vout<br />
−<br />
jωC R<br />
4 4 S<br />
4 5<br />
. (7.11)<br />
Dies ergibt die untere Schaltung in der folgenden Abbildung mit<br />
CF4 1 CF4<br />
CR 4 S = ⋅ , CR 4 5 = ⋅<br />
C f C f<br />
1 . (7.12)<br />
41 42<br />
Prof. Dr.-Ing. R. Laur - 180 -<br />
ITEM
Kapitel 6: Digitale Schaltungstechnik Integrierte Schaltungen II<br />
Werden die 3 Schaltungen in der Abbildung entsprechend den Signalbezeichnungen verschaltet,<br />
entsteht eine Schaltung, die das RLC-Filter wie gewünscht realisiert. ES ist offensichtlich,<br />
daß die Taktfrequenz f deutlich höher als der höchste Frequenzanteil des Eingangssignals sein<br />
muß. Dies wird natürlich auch vom Abtasttheorem gefordert. Der Schaltung muß daher ein<br />
Tiefpaßfilter vorgeschaltet werden, das eine geeignete Begrenzung des Eingangssignals gewährleistet.<br />
7.4 Grundlagen der digitalen Signalverarbeitungsschaltungen<br />
Die Digitaltechnik ermöglicht eine flexible, leistungsfähige und sehr genaue Verarbeitung<br />
von Signalen. Numerische Verfahren auf Mikrocontrollern oder Signalprozessoren implemen-<br />
Prof. Dr.-Ing. R. Laur - 181 -<br />
ITEM
Kapitel 6: Digitale Schaltungstechnik Integrierte Schaltungen II<br />
tiert bieten die Möglichkeit der Anwendung weitgehend beliebiger Algorithmen zur Signalverarbeitung<br />
(Addition, Multiplikation, Integration, Faltung, Transformation, etc.).<br />
7.4.1 Signalverarbeitungskette<br />
Da physikalische Signale in der Regel als zeitkontinuierliche, analoge Signale vorliegen,<br />
müssen diese zunächst in zeitdiskrete, digitale Signale gewandelt werden. Diese können digital<br />
verarbeitet werden. Danach erfolgt wieder eine Wandlung des verarbeiteten Signals in ein<br />
zeitkontinuierliches, analoges Signal. Die zugehörige Signalverarbeitungskette ist im folgenden<br />
dargestellt.<br />
Nach der Wandlung der physikalischen Signalgröße in ein analoges elektrisches Signal, erfolgt<br />
zunächst eine Bandbegrenzung durch Tiefpassfilterung (LPF). Die Tiefpassfilterung<br />
verhindert, dass hochfrequente Signalanteile, deren Frequenzen das Abtasttheorem nicht erfüllen<br />
(Unterabtastung), zum Alias-Effekt führen (s.u.). Durch ein Abtast-Halteglied (S/H)<br />
entsteht aus dem zeitkontinuierlichen ein zeitdiskretes analoges Signal. Danach erfolgt mit einem<br />
Analog-Digitalwandler (ADC) eine Quantisierung der zeitdiskreten Signale und deren<br />
Darstellung durch einen digitalen Code. Das Signal wird jetzt durch eine zeitlich Folge von<br />
digitalen Codes repräsentiert. In diesem Zustand kann die digitale Signalverarbeitung erfolgen.<br />
Das resultierende, verarbeitete digitale Signal wird danach mit Hilfe eines Digital-<br />
Analogwandlers (DAC) in ein zeitdiskretes, analoges Signal gewandelt. Ein Tiefpassfilter<br />
(LPF) entfernt die hochfrequenten Signalanteile und „glättet“ das zeitdiskrete Signal zum verarbeiteten<br />
zeitkontinuierlichen Signal, das mit Hilfe eines Wandlers in die gewünschte physikalische<br />
Signalgröße gewandelt wird.<br />
7.4.2 Alias-Effekt<br />
Die folgende Abbildung zeigt anschaulich den Entstehung des Alias-Effekts durch Unterabtastung.<br />
Die Abtastperiode entspricht etwa dem 3,3-fachen der Signalperiode. Die Abtastpunkte<br />
ergeben eine harmonische Schwingung, deren Frequenz ungleich der Frequenz des Signals<br />
ist. Man kann einfach zeigen, dass die Frequenz des Alias-Signals gleich der Differenz von<br />
Signalfrequenz und Abtastfrequenz ist:<br />
fAlias = fSig−<br />
fT.<br />
(7.13)<br />
Der Alias-Effekt führt zu Signalverzerrungen. Er muß durch Tiefpassfilterung des Signals und<br />
durch eine hinreichend hohe Abtastfrequenz verhindert werden.<br />
Prof. Dr.-Ing. R. Laur - 182 -<br />
ITEM
Kapitel 6: Digitale Schaltungstechnik Integrierte Schaltungen II<br />
7.4.3 Abtastung<br />
Die Abtastung erfolgt mit Abtast-Haltegliedern, wie sie in 7.2 dargestellt wurden. Die folgende<br />
Abbildung zeigt das Ausgangssignal eines Abtast-Haltegliedes für ein gegebenes Eingangssignal.<br />
Das Ausgangssignal schwingt zunächst ein. Erst nach Abschluß des Einschwingvorgangs<br />
darf das Halte-Signal erfolgen. Ladungsinjektion und Spannungsteilung des<br />
Taktes führen zu einer Fehlspannung (pedestal error), die minimiert werden muß. Leckströme<br />
des Haltekondenators und der endliche Eingangswiderstand des Operationsverstärkers führen<br />
zu einer schleichenden Entladung (droop – error, to droop – welken, schwinden).<br />
Nichtlinearitäten, Offset-Spannung u.a. des Verstärkers führen zu weiteren Fehlern.<br />
Ein typischer Fehler der Abtast-Halte-Glieder ist der sog. „Aperturfehler“. Durch Störungen<br />
des Haltesignals ist der Zeitpunkt der Trennung des Haltekondensators vom Eingangssignal<br />
nur ungenau festgelegt. In der folgenden Abbildung wird anschaulich gezeigt, wie es zum<br />
Aperturfehler kommt, der besonders groß ist, wenn die zeitliche Änderung des Eingangssignal<br />
groß ist.<br />
Prof. Dr.-Ing. R. Laur - 183 -<br />
ITEM
Kapitel 6: Digitale Schaltungstechnik Integrierte Schaltungen II<br />
7.4.4 Prinzipien der Analog-Digital-Wandlung<br />
Die folgende Abbildung zeigt das Prinzipschaltbild eines A/D-Wandlers. Das Verhältnis<br />
vIN<br />
0<<br />
< 1 bestimmt den Zustand des digitalen Ausgangssignals.<br />
V<br />
REF<br />
Bei einer Breite des Ausgangssignals von N Bits, können 2 unterschiedliche Ausgangszustände<br />
unterschieden werden. Im folgenden soll als Ausgangscode der Dualcode vereinbart<br />
sein. Eine Codewandlung in einen beliebigen anderen Binärcode ist unproblematisch. Bei<br />
äquidistanter Quantisierung können Eingangsspannungsdifferenzen von<br />
N<br />
VREF<br />
∆ vIN<br />
= 1LSB<br />
(7.14)<br />
N<br />
2<br />
aufgelöst werden. Diese Auflösung entspricht der Auflösung der niedrigsten Quantisierungsstufe<br />
(des niederwertigen Bits, LSB). Man bezeichnet diese Auflösung daher als 1 LSB. Die<br />
folgende Abbildung zeigt die Transfercharakteristik eines idealen 3 Bit A/D-Wandlers. Auf<br />
der Abszisse ist die Eingangsspannung in Relation zur Referenzspannung aufgetragen. Die<br />
Ordinate zeigt den resultierenden Code und das zugehörige quantisierte analoge Signal in<br />
Form einer Treppenstufe. Die Differenz zwischen Eingangs- und quantisiertem Signal ergibt<br />
Prof. Dr.-Ing. R. Laur - 184 -<br />
ITEM
Kapitel 6: Digitale Schaltungstechnik Integrierte Schaltungen II<br />
den „Quantisierungsfehler“, der im unteren Teil des Bildes dargestellt ist. In dem dargestellten<br />
Fall ergibt der maximale Quantisierungsfehler<br />
VREF<br />
emax = 0,5 ⋅ 0,5LSB.<br />
(7.15)<br />
N<br />
2<br />
Bei einem realen ADC sind die Quantisierungsstufen nicht uniform. Als Differentielle Nichtlinearität<br />
(DNL) wird die Differenz zwischen der Weite der einzelnen Quantisierungsstufe<br />
und der Weite der idealen Quantisierungsstufe bezeichnet. In der folgenden Abbildung wird<br />
der Einfluß der DNL auf den Quantisierungsfehler dargestellt. Offensichtlich ist der mittlere<br />
Quantisierungsfehler gleich dem maximalen Quantisierungsfehler des idealen ADC.<br />
Prof. Dr.-Ing. R. Laur - 185 -<br />
ITEM
Kapitel 6: Digitale Schaltungstechnik Integrierte Schaltungen II<br />
In der nächsten Abbildung ist der Einfluß von Offsetfehler (links) und Verstärkungsfehler<br />
(rechts) auf den Quantisierungsfehler dargestellt. Der Offsetfehler führt zu einer Überlagerung<br />
des Quantisierungsfehler mit einem konstanten Wert, während der Verstärkungsfehler zu<br />
einem zunehmenden Quantisierungsfehler mit zunehmender Eingangsspannung führt.<br />
Als Störspannungsabstand (signal-to-noise ratio, SNR) wird das Verhältnis von Effektivwert<br />
des Nutzsignals zum Effektivwert der Störspannung bezeichnet:<br />
Vin,max<br />
SNR = 20⋅ log( ) . (7.16)<br />
V<br />
Der Störspannungsabstand soll für den Fall des idealen ADC bestimmt werden. Die maximale<br />
Eingangsspannung ist durch die Referenzspannung gegeben. Unter der Voraussetzung, daß es<br />
sich um eine ungestörte, harmonische Schwingung handelt, ergibt sich für ihren Effektivwert:<br />
N<br />
1 VREF<br />
2 vLSB<br />
V in,max<br />
= ⋅ =<br />
2 2 2 2 (7.17)<br />
Der Effektivwert der Störspannung ergibt sich durch quadratische Mittelung des Quantifizierungsfehlers,<br />
der im unteren Teil der Abb. ... als „Sägezahnfunktion“ dargestellt ist:<br />
v+ vLSB<br />
1<br />
2<br />
E e de<br />
vLSB<br />
v<br />
stoer<br />
vLSB<br />
= ∫ = (7.18)<br />
12<br />
SNR = 20⋅ log(<br />
N<br />
2 vLSB<br />
2 2<br />
vLSB<br />
12<br />
) = 20⋅N⋅ log(2) + 20⋅log(12) −20⋅ log(2 2) (7.19)<br />
SNR = 6,02N + 1,76<br />
(7.20)<br />
Prof. Dr.-Ing. R. Laur - 186 -<br />
ITEM
Kapitel 6: Digitale Schaltungstechnik Integrierte Schaltungen II<br />
Der Störspannungsabstand ist beim idealen ADC demnach linear abhängig von der Auflösung<br />
des ADC. Umgekehrt kann aus dem erforderlichen Störspannungsabstand die erforderliche<br />
Auflösung des ADC berechnet werden. Wird beispielsweise ein Störspannungsabstand von 80<br />
dB gefordert, ergibt sich die Auflösung N zu<br />
80 −1,76<br />
N = = 12,99 ≈13bit . (7.21)<br />
6,02<br />
7.4.5 Prinzipien der Digital-Analog-Wandlung<br />
Die Abbildung zeigt das Prinzipschaltbild eines D/A-Wandlers (DAC) ist in nachfolgender<br />
Abbildung dargestellt. Die Ausgangsspannung kann diskrete Werte im Intervall<br />
0≤ vOUT < VREF<br />
(7.22)<br />
annehmen. Das digitale Eingangssignal mit der Informationsbreite (Auflösung) N Bit adressiert<br />
das jeweilige diskrete Ausgangssignal<br />
D<br />
v OUT (D) = ⋅ V N REF . (7.23)<br />
2<br />
Die nachfolgende Abbildung zeigt die Übertragungscharakteristik für einen idealen 3-Bit<br />
DAC. Auf der Abszisse ist der Eingangscode aufgetragen. Auf der Ordinate ist entsprechend<br />
das ideale Ausgangssignal in Bezug zur Referenzspannung aufgetragen. Das Spannungsinkrement<br />
ergibt sich zu<br />
∆ v = 2 V 1 LSB<br />
−N<br />
OUT REF<br />
(7.24)<br />
und wird anschaulich als 1 LSB bezeichnet, da dies die Spannungsänderung bei Veränderung<br />
des LSB ist. In den eingezeichneten Punkte stimmen Ausgangs- und Sollspannung überein.<br />
Der maximale Fehler der Ausgangsspannung beim idealen DAC ist demnach<br />
− (N+ 1)<br />
e = 0,5⋅∆ v = 2 ⋅V0,5 LSB.<br />
(7.25)<br />
max OUT REF<br />
Prof. Dr.-Ing. R. Laur - 187 -<br />
ITEM
Kapitel 6: Digitale Schaltungstechnik Integrierte Schaltungen II<br />
Die maximale Ausgangsspannung beträgt<br />
v<br />
OUT,max<br />
N<br />
2 −1<br />
N REF<br />
= V . (7.26)<br />
2<br />
Die folgende Abbildung zeigt die Übertragungscharakteristik eines nichtidealen DAC. Die<br />
Ausgangsspannung weicht von der Sollspannung ab. Die Spannungsdifferenz der einzelnen<br />
Übergänge weicht von der idealen Spannungsdifferenz ab. Die Übertragungscharakteristik ist<br />
nichtlinear. Als differentielle Nichtlinearität des i-ten Übergangs wird definiert:<br />
DNL = ( v −v) −∆v.<br />
(7.27)<br />
Angegeben wird sie üblicherweise in LSB.<br />
i OUT , i+ 1 OUT , i OUT , ideal<br />
Prof. Dr.-Ing. R. Laur - 188 -<br />
ITEM
Kapitel 6: Digitale Schaltungstechnik Integrierte Schaltungen II<br />
Als integrale Nichtlinearität INLi<br />
wird die Abweichung der Ausgangsspannung von der idealen<br />
Übertragungscharakteristik für einen bestimmten Code i bezeichnet (vgl. folgende Abbildung):<br />
INL = v −v−<br />
i OUT , i OUT , i ideal<br />
. (7.28)<br />
Die Benennung deutet an, daß die integrale Nichtlinearität sich aus der Summation der differentiellen<br />
Nichtlinearitäten ergibt.<br />
Für Offsetfehler, Verstärkungsfehler und Störspannungsabstand ergeben sich entsprechende<br />
Beziehungen wie im Fall des ADC.<br />
7.5 Digital-Analogwandler<br />
Da DAC in ADC-Schaltungskonzepten Verwendung finden, soll zunächst eine Auswahl an<br />
DAC-Konzepten betrachtet werden.<br />
Ein offensichtlich einfaches Konzept ergibt sich bei Verwendung einer Widerstandskette, wie<br />
sie in der folgenden Abbildung dargestellt ist. Es ist lediglich erforderlich den betreffenden<br />
„Abgriff“ der Spannungsteilerkette mit dem Ausgang des DAC zu verbinden. Um eine Belastung<br />
des Spannungsteilers zu vermeiden, muß der Ausgang durch einen Spannungsfolger gepuffert<br />
werden. Es werden 2 Widerstände in der Kette benötigt. Eine entsprechende Anzahl<br />
an Schaltern ist erforderlich. Die Schalter bilden kapazitive Lasten, die das<br />
Einschwingverhalten des DAC beeinflussen. Bei der Schaltung im linken Teil der Abbildung<br />
ist der Ausgang mit N Schaltern verbunden. Bei Verwendung eines binären Schalterfeldes<br />
(rechte Abbildung) wird der Ausgang lediglich von Schaltern belastet.<br />
N<br />
2 N<br />
2N<br />
Prof. Dr.-Ing. R. Laur - 189 -<br />
ITEM
Kapitel 6: Digitale Schaltungstechnik Integrierte Schaltungen II<br />
Prof. Dr.-Ing. R. Laur - 190 -<br />
ITEM
Kapitel 6: Digitale Schaltungstechnik Integrierte Schaltungen II<br />
Prof. Dr.-Ing. R. Laur - 191 -<br />
ITEM
Kapitel 6: Digitale Schaltungstechnik Integrierte Schaltungen II<br />
Prof. Dr.-Ing. R. Laur - 192 -<br />
ITEM