

PDF-Download
PDF-Download
PDF-Download

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
Kurzversion der Dissertation von Herrn Dr.-Ing. Tobias Düser<br />
X-in-the-Loop – ein durchgängiges Validierungsframework für die Fahrzeugentwicklung<br />
am Beispiel von Antriebsstrangfunktionen und Fahrerassistenzsystemen<br />
Die aktuelle Entwicklung im Fahrzeugbau mit einer enormen Zunahme an Antriebskonzepten, zum<br />
Beispiel Doppelkupplungsgetriebe, Hybridantriebe und Brennstoffzellen, sowie komplexe Steuerungs-<br />
und Regelungsfunktionen erfordern die Erforschung neuer Entwicklungs- und insbesondere<br />
Validierungsmethoden – Methoden, die Simulation und reale Erprobung auf allen Ebenen vom<br />
Wirkflächenpaar bis zum Gesamtfahrzeug sinnvoll koppeln und unterstützen. Die Integration von<br />
Fahrer und Umwelt, in einer durchgängigen und reproduzierbaren Art und Weise, ist eine wichtige<br />
Voraussetzung für die Validierung neuer Fahrerassistenzsysteme und Antriebsstrangfunktionen.<br />
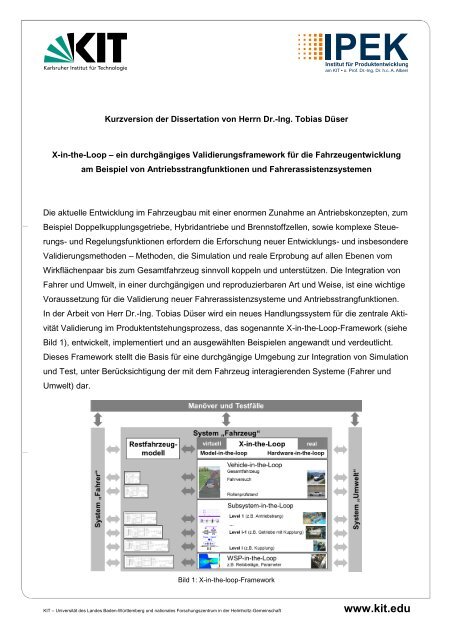
In der Arbeit von Herr Dr.-Ing. Tobias Düser wird ein neues Handlungssystem für die zentrale Aktivität<br />
Validierung im Produktentstehungsprozess, das sogenannte X-in-the-Loop-Framework (siehe<br />
Bild 1), entwickelt, implementiert und an ausgewählten Beispielen angewandt und verdeutlicht.<br />
Dieses Framework stellt die Basis für eine durchgängige Umgebung zur Integration von Simulation<br />
und Test, unter Berücksichtigung der mit dem Fahrzeug interagierenden Systeme (Fahrer und<br />
Umwelt) dar.<br />
Bild 1: X-in-the-loop-Framework<br />
KIT – Universität des Landes Baden-Württemberg und nationales Forschungszentrum in der Helmholtz-Gemeinschaft<br />
www.kit.edu
Ausgehend von einer abstrakten und systemtheoretischen Beschreibung wird eine flexible und<br />
offene, auf etablierten Methoden und Werkzeugen basierende Soft- und Hardwarearchitektur abgeleitet<br />
– eine Voraussetzung für den produktiven, industriellen Einsatz.<br />
Im Bedarfsfall muss genau geklärt werden, inwieweit ein Restfahrzeugmodell, bzw. die Integration<br />
von Fahrer oder Umwelt, notwendig ist. Gleiches gilt für den entsprechenden Detaillierungsgrad.<br />
Hierfür wird ein Prozess (siehe Auszug in Bild 2) bereitgestellt, der eine aufgabenorientierte<br />
Spezifikation und Konfiguration des Frameworks ermöglicht. Dieser wird zum einen theoretisch<br />
beschrieben, an einem Anwendungsbeispiel verdeutlicht sowie in Form eines Leitfadens für<br />
Entwickler zur Verfügung gestellt.<br />
Bild 2: Auszug Spezifikationsprozess – Alternative Lösungen<br />
Die Implementierung erfolgt am Beispiel Vehicle-in-the-Loop – sowohl am Rollenprüfstand (siehe<br />
Bild 3) als auch im Fahrversuch. Nach dem Aufzeigen neuer Applikationsmöglichkeiten wird an<br />
vier Beispielen aus dem Bereich der Antriebsstrangfunktionen und Fahrerassistenzsysteme die<br />
Flexibilität und die Vielfältigkeit des Frameworks verdeutlicht.<br />
Bild 3: Vehicle-in-the-Loop am Rollenprüfstand<br />
Seite 2 von 2









