Deutsch - Auma.com
Deutsch - Auma.com
Deutsch - Auma.com

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
Beschreibung der Datenschnittstelle<br />
Stellantriebs-Steuerung<br />
AUMATIC AC 01.2/ACExC 01.2 Profibus DP<br />
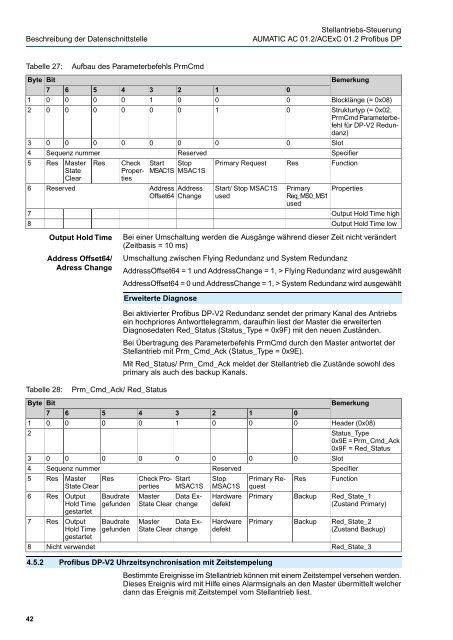
Tabelle 27:<br />
Byte<br />
1<br />
2<br />
3<br />
4<br />
5<br />
6<br />
7<br />
8<br />
Bit<br />
7<br />
0<br />
0<br />
0<br />
6<br />
0<br />
0<br />
0<br />
Aufbau des Parameterbefehls PrmCmd<br />
5<br />
0<br />
0<br />
0<br />
Sequenz nummer<br />
Res<br />
Master<br />
State<br />
Clear<br />
Reserved<br />
Res<br />
Output Hold Time<br />
Address Offset64/<br />
Adress Change<br />
4<br />
0<br />
0<br />
0<br />
Check<br />
Properties<br />
3<br />
1<br />
0<br />
0<br />
Start<br />
MSAC1S<br />
2<br />
0<br />
0<br />
0<br />
Reserved<br />
Stop<br />
MSAC1S<br />
Address Address<br />
Offset64 Change<br />
1<br />
0<br />
1<br />
0<br />
Primary Request<br />
Start/ Stop MSAC1S<br />
used<br />
0<br />
0<br />
0<br />
0<br />
Res<br />
Primary<br />
Req_MS0_MS1<br />
used<br />
Bemerkung<br />
Blocklänge (= 0x08)<br />
Strukturtyp (= 0x02,<br />
PrmCmd Parameterbefehl<br />
für DP-V2 Redundanz)<br />
Slot<br />
Specifier<br />
Function<br />
Properties<br />
Output Hold Time high<br />
Output Hold Time low<br />
Bei einer Umschaltung werden die Ausgänge während dieser Zeit nicht verändert<br />
(Zeitbasis = 10 ms)<br />
Umschaltung zwischen Flying Redundanz und System Redundanz<br />
AddressOffset64 = 1 und AddressChange = 1, > Flying Redundanz wird ausgewählt<br />
AddressOffset64 = 0 und AddressChange = 1, > System Redundanz wird ausgewählt<br />
Erweiterte Diagnose<br />
Bei aktivierter Profibus DP-V2 Redundanz sendet der primary Kanal des Antriebs<br />
ein hochpriores Antworttelegramm, daraufhin liest der Master die erweiterten<br />
Diagnosedaten Red_Status (Status_Type = 0x9F) mit den neuen Zuständen.<br />
Bei Übertragung des Parameterbefehls PrmCmd durch den Master antwortet der<br />
Stellantrieb mit Prm_Cmd_Ack (Status_Type = 0x9E).<br />
Mit Red_Status/ Prm_Cmd_Ack meldet der Stellantrieb die Zustände sowohl des<br />
primary als auch des backup Kanals.<br />
Tabelle 28:<br />
Prm_Cmd_Ack/ Red_Status<br />
Byte<br />
1<br />
2<br />
3<br />
4<br />
5<br />
6<br />
7<br />
8<br />
Bit<br />
7<br />
0<br />
0<br />
6<br />
0<br />
0<br />
Sequenz nummer<br />
Res<br />
Res<br />
Res<br />
Master<br />
State Clear<br />
Output<br />
Hold Time<br />
gestartet<br />
Output<br />
Hold Time<br />
gestartet<br />
Nicht verwendet<br />
5<br />
0<br />
0<br />
Res<br />
Baudrate<br />
gefunden<br />
Baudrate<br />
gefunden<br />
4<br />
0<br />
0<br />
3<br />
1<br />
0<br />
Check Properties<br />
Start<br />
MSAC1S<br />
Master<br />
State Clear<br />
Master<br />
State Clear<br />
Data Exchange<br />
Data Exchange<br />
2<br />
0<br />
0<br />
Reserved<br />
Stop<br />
MSAC1S<br />
Hardware<br />
defekt<br />
Hardware<br />
defekt<br />
1<br />
0<br />
0<br />
Primary Request<br />
Primary<br />
Primary<br />
0<br />
0<br />
0<br />
Res<br />
Backup<br />
Backup<br />
Bemerkung<br />
Header (0x08)<br />
Status_Type<br />
0x9E = Prm_Cmd_Ack<br />
0x9F = Red_Status<br />
Slot<br />
Specifier<br />
Function<br />
Red_State_1<br />
(Zustand Primary)<br />
Red_State_2<br />
(Zustand Backup)<br />
Red_State_3<br />
4.5.2 Profibus DP-V2 Uhrzeitsynchronisation mit Zeitstempelung<br />
Bestimmte Ereignisse im Stellantrieb können mit einem Zeitstempel versehen werden.<br />
Dieses Ereignis wird mit Hilfe eines Alarmsignals an den Master übermittelt welcher<br />
dann das Ereignis mit Zeitstempel vom Stellantrieb liest.<br />
42