Grundlagen - schmidt-walter.eit.h-da.d...
Grundlagen - schmidt-walter.eit.h-da.d...
Grundlagen - schmidt-walter.eit.h-da.d...

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
Elektrische Maschinen<br />
Prof. Dr.-Ing. Heinz Schmidt-Walter<br />
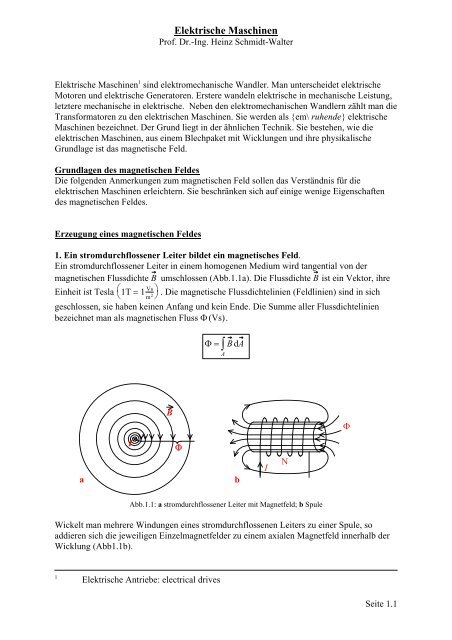
Elektrische Maschinen 1 sind elektromechanische Wandler. Man unterscheidet elektrische<br />
Motoren und elektrische Generatoren. Erstere wandeln elektrische in mechanische Leistung,<br />
letztere mechanische in elektrische. Neben den elektromechanischen Wandlern zählt man die<br />
Transformatoren zu den elektrischen Maschinen. Sie werden als {em\ ruhende} elektrische<br />
Maschinen bezeichnet. Der Grund liegt in der ähnlichen Technik. Sie bestehen, wie die<br />
elektrischen Maschinen, aus einem Blechpaket mit Wicklungen und ihre physikalische<br />
Grundlage ist <strong>da</strong>s magnetische Feld.<br />
<strong>Grundlagen</strong> des magnetischen Feldes<br />
Die folgenden Anmerkungen zum magnetischen Feld sollen <strong>da</strong>s Verständnis für die<br />
elektrischen Maschinen erleichtern. Sie beschränken sich auf einige wenige Eigenschaften<br />
des magnetischen Feldes.<br />
Erzeugung eines magnetischen Feldes<br />
1. Ein stromdurchflossener L<strong>eit</strong>er bildet ein magnetisches Feld.<br />
Ein stromdurchflossener L<strong>eit</strong>er in einem homogenen Medium wird tangential von der<br />
magnetischen Flussdichte B umschlossen (Abb.1.1a). Die Flussdichte B ist ein Vektor, ihre<br />
Einh<strong>eit</strong> ist Tesla Vs<br />
1T 1 . Die magnetische Flussdichtelinien (Feldlinien) sind in sich<br />
m 2 <br />
geschlossen, sie haben keinen Anfang und kein Ende. Die Summe aller Flussdichtelinien<br />
bezeichnet man als magnetischen Fluss Vs<br />
B dA<br />
A<br />
B<br />
<br />
a<br />
I<br />
<br />
b<br />
I<br />
N<br />
Abb.1.1: a stromdurchflossener L<strong>eit</strong>er mit Magnetfeld; b Spule<br />
Wickelt man mehrere Windungen eines stromdurchflossenen L<strong>eit</strong>ers zu einer Spule, so<br />
addieren sich die jeweiligen Einzelmagnetfelder zu einem axialen Magnetfeld innerhalb der<br />
Wicklung (Abb1.1b).<br />
1<br />
Elektrische Antriebe: electrical drives<br />
S<strong>eit</strong>e 1.1
Elektrische Maschinen<br />
Prof. Dr.-Ing. Heinz Schmidt-Walter<br />
2. Erzeugung eines magnetischen Feldes mittels Permanentmagneten<br />
Permanentmagneten bestehen aus hartmagnetischen Werkstoffen, die durch Remanenz ihr<br />
Magnetfeld erhalten (siehe die Abschnitte 2.3.8.1 und 2.3.11).<br />
N<br />
B<br />
Abb. 1.2: permanent erregtes Magnetfeld<br />
S<br />
Motorprinzip<br />
Ein stromdurchflossener L<strong>eit</strong>er im Magnetfeld erfährt eine Kraft (Motorprinzip, siehe Abb.<br />
1.3).<br />
.<br />
Erregerstrom<br />
F<br />
N<br />
I<br />
S<br />
l<br />
B<br />
F<br />
N<br />
I<br />
r<br />
I<br />
S<br />
B<br />
F<br />
a<br />
b<br />
Abb. 1.3: Ein stromdurchflossener L<strong>eit</strong>er im Magnetfeld erfährt eine Kraft (Motorprinzip)<br />
Sie beträgt: F I l B <br />
. Wenn alle Größen senkrecht aufeinander stehen beträgt sie<br />
(Abb.1.3a):<br />
F I l B<br />
In elektrischen Motoren wird der stromführende L<strong>eit</strong>er N-mal axial um den zylinderförmigen<br />
Rotor gewickelt, so<strong>da</strong>ss die Kraft F NI l B beträgt. Diese Kraft tritt einmal je Pol auf,<br />
d.h. in Abb. 1.3b zweimal. Das resultierende Drehmoment beträgt:<br />
M 2 NI l B r<br />
S<strong>eit</strong>e 1.2
Elektrische Maschinen<br />
Prof. Dr.-Ing. Heinz Schmidt-Walter<br />
Generatorprinzip<br />
In einem bewegten L<strong>eit</strong>er im Magnetfeld wird eine Spannung induziert (Generatorprinzip,<br />
siehe Abb. 1.4).<br />
Erregerstrom<br />
v<br />
N<br />
l<br />
B<br />
u q<br />
N<br />
<br />
r<br />
B<br />
u q<br />
S<br />
S<br />
a<br />
Abb. 1.4: In einem bewegten L<strong>eit</strong>er im Magnetfeld wird eine Spannung induziert (Generatorprinzip)<br />
Sie beträgt: u q l v B <br />
. Wenn alle Größen senkrecht aufeinander stehen beträgt sie<br />
(Abb1.4a):<br />
u q l v B<br />
In elektrischen Generatoren ist der bewegte L<strong>eit</strong>er N-mal axial um den rotierenden Rotor<br />
gewickelt, so<strong>da</strong>ss die induzierte Spannung u q Nl v B beträgt. Diese Spannung tritt einmal<br />
je Pol auf, d.h. in Abb 1.4b zweimal. Mit der Winkelgeschwindigk<strong>eit</strong> beträgt die<br />
resultierende Spannung:<br />
b<br />
u q 2 Nl r B<br />
Allgemeines Induktionsgesetz<br />
Die induzierte Spannung u q in einer L<strong>eit</strong>erschleife ist proportional der Änderung des<br />
magnetischen Flusses, der die L<strong>eit</strong>erschleife durchtritt (Abb. 1.5a):<br />
u q N d<br />
dt<br />
bzw.<br />
1 N u q dt Konst.<br />
Dabei ist es gleichgültig, ob sich die magnetische Flussdichte z<strong>eit</strong>lich ändert, oder ob sich die<br />
Fläche des umfassten Flusses z<strong>eit</strong>lich ändert (siehe auch Kap. 2.3.13).<br />
u q N d<br />
dt<br />
N <br />
dB A<br />
dt<br />
N A dB<br />
dt N B dA<br />
dt<br />
S<strong>eit</strong>e 1.3
Elektrische Maschinen<br />
Prof. Dr.-Ing. Heinz Schmidt-Walter<br />
(t)<br />
<br />
u q<br />
t<br />
u q<br />
a<br />
u q<br />
b<br />
N <br />
Abb. 1.5: a u q<br />
und allgemein; b bei sinusförmigen Größen<br />
t<br />
Bei sinusförmiger Spannung u q ergibt sich ein um 90° nacheilender, sinusförmiger<br />
magnetischer Fluss (Abb. 1.5b):<br />
1 N u q dt 1 N <br />
U sin t dt <br />
1<br />
cos t<br />
N<br />
Hinweis: Auf die Angabe einer Integrationskonstanten wurde verzichtet, weil sich im<br />
stationären Zustand in jedem Fall ein mittlere magnetische Fluss gleich Null einstellt.<br />
Umgekehrt wird in einer L<strong>eit</strong>erschleife, die einen z<strong>eit</strong>lich veränderlichen Fluss umfasst, eine<br />
Spannung induziert:<br />
u q N d d sin t<br />
N N cos t<br />
dt dt<br />
Hinweis: Der magnetische Fluss ist nur abhängig von dem z<strong>eit</strong>lichen Verlauf der Spannung<br />
und der Windungszahl. Er wird durch <strong>da</strong>s Eisen nicht beeinflusst. Der Eisenkreis wird<br />
benutzt, um den Fluss zum Luftspalt zu l<strong>eit</strong>en (siehe Abb.1.5.b).<br />
Ferromagnetische Werkstoffe<br />
Der wichtigste ferromagnetische Werkstoff für elektrische Maschinen ist Eisen. Eisen<br />
bündelt <strong>da</strong>s magnetische Feld. Diese Eigenschaft wird mittels der relativen Permeabilität r<br />
quantifiziert. Der Wert von r<br />
liegt bei Eisen bei einigen tausend bis zehntausend.<br />
Anschaulich kann man sagen, <strong>da</strong>ss Eisen den magnetischen Fluss um den Faktor r<br />
besser<br />
l<strong>eit</strong>et als Luft. Mittels Eisen kann der magnetische Fluss in der elektrischen Maschine<br />
dorthin gelenkt werden, wo er gebraucht wird. Dies ist in der Regel der Luftspalt zwischen<br />
Stator und Rotor, denn dort befindet sich die stromdurchflossene Wicklung, die im Betrieb<br />
des Motors die momentenbildende Kraft erfährt. Der magnetische Fluss fließt in einem<br />
geschlossenen Umlauf. Der Eisenweg muss <strong>da</strong>her ebenfalls einen geschlossenen Umlauf<br />
bilden. Man bezeichnet den Weg des magnetischen Flusses deswegen als Eisenkreis. In<br />
Abb. 1.6.b verläuft der Eisenkreis vom Nordpol über den oberen Luftspalt, durch den Rotor,<br />
über den unteren Luftspalt, durch den Südpol und durch den Eisenrückschluss zurück zum<br />
Nordpol.<br />
S<strong>eit</strong>e 1.4
Elektrische Maschinen<br />
Prof. Dr.-Ing. Heinz Schmidt-Walter<br />
Erregerstrom<br />
<br />
Eisenrückschluss<br />
N<br />
I<br />
N<br />
Pole<br />
Rotor<br />
<br />
Luftspalt<br />
S<br />
S<br />
a<br />
Abb. 1.6: a Eisenkreis mit Luftspalt; b Eisenkreis eines Motors<br />
b<br />
Eisen behält jedoch nur bis zu seiner Sättigungsgrenze die guten magnetfeldl<strong>eit</strong>enden<br />
Eigenschaften. Oberhalb der Sättigungsgrenze verliert es zunehmend diese Eigenschaft, bis<br />
es sich bei sehr hohen magnetischen Flussdichten wie Luft verhält. Deswegen kann man<br />
Eisen zur L<strong>eit</strong>ung des magnetischen Flusses nur unterhalb seiner Sättigungsgrenze nutzen.<br />
Die Sättigungsgrenze liegt üblicherweise zwischen 0,3 T (Ferrit) und 2T ( warmgewalzte<br />
Elektrobleche). Da der magnetische Fluss <strong>da</strong>s Flächenintegral über die Flussdichte B ist,<br />
benötigt man zur L<strong>eit</strong>ung eines bestimmten Flusses einen bestimmten Eisenquerschnitt.<br />
D.h. die Menge des benötigten Eisens hängt von der Größe des magnetischen Flusses ab.<br />
Streuung<br />
Das magnetische Feld verläuft nicht vollständig in dem gewünschten, durch <strong>da</strong>s Eisen<br />
vorgegebenen Weg. Ein Teil der Feldlinien schließt sich über die Luft. Dieser Effekt ist umso<br />
stärker, je stärker <strong>da</strong>s Eisen in die Sättigung gefahren wird. Die Summe dieser<br />
unerwünschten Feldlinien nennt man Streuung 2 oder Streufeld.<br />
I<br />
Streufeld<br />
Abb. 1.8: Streuung<br />
Eisenverluste<br />
Eisen wird bei einer Wechseldurchflutung warm, d.h. es entstehen Verluste. Diese setzen sich<br />
aus den Hystereseverlusten und den Wirbelstromverlusten zusammen.<br />
Hystereseverluste<br />
Sie entstehen bei dem Durchlaufen der Magnetisierungskurve (Hysteresekurve). Die in Abb.<br />
1.8a umschlossene Fläche hat die Dimension Wattsekunde pro Kubikmeter<br />
2<br />
Streuung: leakage<br />
S<strong>eit</strong>e 1.5
Elektrische Maschinen<br />
Prof. Dr.-Ing. Heinz Schmidt-Walter<br />
( B H Vs A ). Diese Fläche ist proportional zum Quadrat der Aussteuerung B. Die<br />
m 2 m Ws <br />
m 3<br />
entstehende Verlustleistung ist außerdem proportional zur Frequenz.<br />
Daraus ergibt sich für die Hystereseverluste:<br />
P Hysteresis f B 2<br />
Wirbelstromverluste<br />
Ein magnetischer Wechselfluss erzeugt im Eisen nach dem Induktionsgesetz Spannungen<br />
( u ). Diese verursachen innerhalb des Eisens einen Strom. Dieser Strom wird als 3<br />
q d f B<br />
dt<br />
bezeichnet (Abb. 1.8b). Er verursacht Verluste, die proportional zu seinem Quadrat sind. Zur<br />
Reduzierung dieser Ströme wird <strong>da</strong>s Eisen geblecht. Je höher die Frequenz des<br />
Wechselflusses ist, desto feiner wird <strong>da</strong>s Eisen geblecht, wobei die Bleche gegeneinander<br />
isoliert sind. Für Hochfrequenzanwendungen wird <strong>da</strong>s Eisen aus einem Pulver<br />
zusammengepresst, <strong>da</strong>ss durch seinen Kleber in sich isoliert ist (Eisenpulverkerne, Ferrite).<br />
Für die Wirbelstromverluste folgt aus diesen Betrachtungen:<br />
P Wirbelstrom f 2 B 2<br />
.<br />
B<br />
(t)<br />
H<br />
u , i q<br />
a<br />
Abb. 1.8: a Hysteresekurve; b Wirbelstrom<br />
b<br />
Drehmoment, mechanische Leistung und Beschleunigung<br />
Elektrische Maschinen wandeln elektrische in mechanische Leistung und umgekehrt<br />
(Abb.1.9).<br />
Pv<br />
U<br />
I<br />
<br />
M<br />
Abb. 1.9: Leistungsbilanz eines elektrischen Motors<br />
Ein elektrischer Motor nimmt die elektrische Leistung P el U I auf und gibt die<br />
mechanische Leistung P mech M ab. Ein Generator nimmt die mechanische Leistung<br />
3<br />
Wirbelstrom: eddy current<br />
S<strong>eit</strong>e 1.6
Elektrische Maschinen<br />
Prof. Dr.-Ing. Heinz Schmidt-Walter<br />
P mech M auf und gibt die elektrische Leistung P el U I ab. In beiden Fällen geht bei der<br />
Wandlung die Verlustleistung P v<br />
als Wärmeleistung verloren.<br />
Es gilt für den Motor:<br />
und für den Generator:<br />
P mech M P el P v U I P v<br />
P el U I P mech P v M P v<br />
Der Wirkungsgrad der Leistungswandlung ist <strong>da</strong>nn<br />
für den Motor:<br />
Mot P mech<br />
M <br />
P el U I<br />
und für den Generator: Gen P el<br />
U I<br />
P mech M <br />
Statt der Winkelgeschwindigk<strong>eit</strong> s 1 wird bei elektrischen Maschinen die Drehzahl 4<br />
n in Umdrehungen pro Minute (min -1 ) angegeben. Die mechanische Leistung beträgt<br />
<strong>da</strong>nn:<br />
P mech M M 2 f M 2<br />
n<br />
60 s<br />
min<br />
HINWEIS:<br />
Zur eindeutigen Handhabung der Winkelgeschwindigk<strong>eit</strong> und der Frequenz f wird stets<br />
in s -1 und f in Hz angegeben (obwohl s -1 statt Hz physikalisch ebenso richtig wäre).<br />
Typenschil<strong>da</strong>ngaben<br />
Die Typenschil<strong>da</strong>ngaben eines Motors beschreiben den Motor in einem Betriebspunkt, dem<br />
sogenannten Bezugspunkt oder Nennpunkt. Dieser Punkt wird mittels der Eingangsgrößen<br />
Spannung U N<br />
und Strom I N<br />
und der mechanischen Ausgangsgrößen Drehzahl n N<br />
und der<br />
mechanischen Leistung an der Welle P N<br />
angegeben. Dazu kommen ggf. w<strong>eit</strong>ere, für den<br />
Bezugspunkt notwendige Angaben, wie beispielsweise der Erregerstrom oder der cos bei<br />
Wechselstrommotoren.<br />
Die Leistungsangabe eines Motors betrifft immer die mechanische Wellenleistung<br />
Ist <strong>da</strong>s prinzipielle Drehzahldrehmomentverhalten des Motors (z.B. Reihenschluss-,<br />
Nebenschlussverhalten) bekannt, so kann mittels der Typenschil<strong>da</strong>ngaben näherungsweise<br />
auf alle anderen Betriebspunkte geschlossen werden.<br />
Baugröße, Drehmoment, Leistung<br />
Nach dem Motorprinzip gilt: M l B I . Geht man <strong>da</strong>von aus, <strong>da</strong>ss die Flußdichte im<br />
Nennbetrieb knapp unter der Sättigungsgrenze gefahren wird und der Strom durch die Dicke<br />
des Kupferdrahtes begrenzt ist, so muß zur Drehmomenterhöhung die Länge l des Motors,<br />
d.h. die Länge des Blechpaketes, wachsen. Eine Verdopplung des Drehmomentes 5 erfordert<br />
somit näherungsweise eine Verdopplung des Motorgewichtes.<br />
4<br />
5<br />
Die Baugröße eines Motors wächst näherungsweise mit dem Drehmoment.<br />
Drehzahl: speed (of rotation)<br />
Drehmoment: torque<br />
S<strong>eit</strong>e 1.7
Elektrische Maschinen<br />
Prof. Dr.-Ing. Heinz Schmidt-Walter<br />
Die Leistung eines Motors beträgt P M Bei einer bestimmten Baugröße wächst die<br />
abgegebene Leistung mit der Drehzahl. Natürlich muß mit einer Leistungserhöhung auch der<br />
zugeführte Strom wachsen, d. h. die Wicklung muß einen größeren Kupferquerschnitt<br />
bekommen und die Belüftung des Motors muß verbessert werden, <strong>da</strong>mit die erhöhte<br />
Verlustleistung abgeführt werden kann. Dennoch gilt näherungsweise:<br />
Die Leistung des Motors wächst näherungsweise mit der Drehzahl<br />
Wünscht man eine bestimmte Antriebsleistung, so wählt man gerne eine hohe Drehzahl bei<br />
kleinem Drehmoment. Das führt zu einer kleinen Baugröße, geringem Gewicht und <strong>da</strong>mit zu<br />
einer kostengünstigen Antriebslösung. Oft ist es günstiger, einen hochdrehenden Motor mit<br />
vorgesetztem Getriebe einzusetzen, als einen langsam drehenden Motor ohne Getriebe<br />
(Beispiel: Heimwerkerbohrmaschinen, Scheibenwischermotoren). Ein wesentlicher Nachteil<br />
bei hochdrehenden Antrieben ist der hohe Geräuschpregel.<br />
Rechtslauf/Linkslauf<br />
Als Rechtslauf einer elektrischen Maschine bezeichnet man die Drehrichtung auf die Welle<br />
gesehen im Uhrzeigersinn.<br />
Drehzahl-Drehmoment-Arb<strong>eit</strong>spunkt<br />
Ein Antrieb besteht aus Motor und Last. Das Antriebsmoment M Mot<br />
eines Motors wird durch<br />
die anzutreibende Last mit dem Lastmoment M Last<br />
belastet. Als stabiler Arb<strong>eit</strong>spunkt stellt<br />
sich genau die Drehzahl n 1<br />
ein, in der <strong>da</strong>s Lastmoment gleich dem Antriebsmoment ist und<br />
die Lastkennlinie im Arb<strong>eit</strong>spunkt eine größere Steigung als <strong>da</strong>s Antriebsmoment hat<br />
(Abb.1.10). Verhalten sich die Steigungen anderes herum, so ist der Arb<strong>eit</strong>spunkt instabil.<br />
M<br />
Antriebsmoment MMot<br />
(Motorkennlinie)<br />
Lastmoment M Last<br />
(Lastkennlinie)<br />
Arb<strong>eit</strong>spunkt<br />
n 1<br />
n<br />
M<br />
M<br />
stabil<br />
instabil<br />
M Last<br />
MMot<br />
n<br />
M<br />
Mot<br />
M Last<br />
n<br />
Abb. 1.10: Arb<strong>eit</strong>spunkt zwischen Motor und Last<br />
Beschleunigung und Hochlaufz<strong>eit</strong>en<br />
Während des Hochlaufs eines Antriebs ist <strong>da</strong>s Antriebsmoment M Mot<br />
größer als <strong>da</strong>s stationäre<br />
Lastmoment M Last<br />
. Die Differenz M Mot<br />
- M Last<br />
treibt den Antrieb an, bis er seinen stabilen<br />
Arb<strong>eit</strong>spunkt erreicht hat. Für die Beschleunigung 6 einer Drehmasse gilt allgemein:<br />
M J d<br />
dt<br />
J: Massenträgh<strong>eit</strong>smoment 7 , : Winkelgeschwindigk<strong>eit</strong>.<br />
6<br />
7<br />
Beschleunigung: acceleration; Verzögerung: deceleration<br />
Massenträgh<strong>eit</strong>smoment: mass moment of inertia<br />
S<strong>eit</strong>e 1.8
Elektrische Maschinen<br />
Prof. Dr.-Ing. Heinz Schmidt-Walter<br />
Für den Antrieb wird <strong>da</strong>raus: M Mot M Last J d , wobei J <strong>da</strong>s gesamte<br />
dt<br />
Massenträgh<strong>eit</strong>smoment des Antriebs ist (Motor und Last). Rechnet man die<br />
Winkelgeschwindigk<strong>eit</strong> in die Drehzahl n um, ergibt sich:<br />
M Mot M Last J d<br />
dt J<br />
2<br />
60 s<br />
min<br />
d n<br />
d t<br />
M<br />
Antriebsmoment M<br />
Mot<br />
M Mot -MLast<br />
Lastmoment M Last<br />
Arb<strong>eit</strong>spunkt<br />
n 1<br />
n<br />
Abb. 1.11: Darstellung des resultierenden Beschleunigungsmomentes M Mot<br />
-M Last<br />
Beschleunigung<br />
Die Beschleunigung beträgt:<br />
d<br />
dt M Mot M Last<br />
J<br />
bzw.<br />
d n<br />
d t M Mot M Last<br />
J<br />
60 s<br />
min<br />
2<br />
Hochlaufz<strong>eit</strong><br />
Aus M Mot M Last J<br />
2<br />
60 s<br />
min<br />
d n<br />
d t<br />
folgt die Hochlaufz<strong>eit</strong>:<br />
t Hoch J <br />
2<br />
60 s<br />
min<br />
n 1<br />
<br />
1<br />
<br />
d n<br />
M<br />
0 Mot M Last<br />
Theoretisch erreicht der Antrieb natürlich nie seinen Arb<strong>eit</strong>spunkt, weil <strong>da</strong>s antreibende<br />
Drehmoment umso kleiner wird, je näher die Drehzahl an den Arb<strong>eit</strong>spunkt kommt. Sofern<br />
die Motor- und Lastkennlinie analytisch vorliegen, kann man bis 1 oder 2% an den<br />
Arb<strong>eit</strong>spunkt heranrechnen, um ein endliches Ergebnis zu erhalten. In der Praxis liegen die<br />
Motor- und Lastkennlinie in der Regel nicht analytisch vor, sondern als gemessene Graphen.<br />
Dann kann man die Hochlaufz<strong>eit</strong> abschnittsweise bestimmen, indem man den Hochlauf in i<br />
Abschnitte unterteilt und für jeden Abschnitt die Abschnittshochlaufz<strong>eit</strong> t m<br />
mittels des<br />
Differenzenquotienten berechnet (Abb. 1.12):<br />
M J<br />
2<br />
60 s<br />
min<br />
d n<br />
d t J<br />
2<br />
60 s<br />
min<br />
n<br />
t<br />
Daraus folgt für jeden Abschnitt:<br />
S<strong>eit</strong>e 1.9
Elektrische Maschinen<br />
Prof. Dr.-Ing. Heinz Schmidt-Walter<br />
M m J<br />
2 n m<br />
60 s t<br />
t m J 2 n m<br />
m 60 s M<br />
min<br />
min m<br />
m: Zähler für die Berechnungsabschnitte<br />
Die Hochlaufz<strong>eit</strong> beträgt <strong>da</strong>nn:<br />
t Hoch t m<br />
M<br />
Antriebsmoment<br />
M<br />
M<br />
M<br />
M<br />
Lastmoment<br />
Arb<strong>eit</strong>spunkt<br />
n<br />
n n n<br />
n1 n2 n3 n4<br />
n<br />
Abb. 1.12: Zur abschnittsweisen Berechnung der Hochlaufz<strong>eit</strong><br />
Die abschnittsweise Berechnung der Hochlaufz<strong>eit</strong> führt ber<strong>eit</strong>s bei sehr grober<br />
Abschnittswahl zu sehr kleinen Fehlern, insbesondere <strong>da</strong>nn, wenn für den letzten Abschnitt<br />
ein kleines Drehzahlintervall gewählt wird.<br />
Beschleunigungsweg<br />
Der Hochlauf eines Antriebes führt zu einem Beschleunigungsweg bzw. bei negativer<br />
Beschleunigung zu einem Bremsweg. Bei rotierenden Systemen beschreibt man den<br />
Beschleunigungsweg zweckmäßigerweise durch den zurückgelegten Winkel oder durch die<br />
Angabe der Umdrehungen, die der Antrieb während der Beschleunigungsphase ausgeführt<br />
hat.<br />
Der zurückgelegte Winkel während der Beschleunigung von einer beliebigen Drehzahl n 1<br />
zur Drehzahl n 2<br />
kann mittels der Beschleunigungsz<strong>eit</strong>en berechnet werden.<br />
Allgemein gilt:<br />
d<br />
dt<br />
und<br />
t 2<br />
1,2 t dt<br />
t 1<br />
Mit d gilt für die Winkeländerung im Z<strong>eit</strong>intervall t näherungsweise t.<br />
dt<br />
Für die Winkelgeschwindigk<strong>eit</strong> wird die mittlere Winkelgeschwindigk<strong>eit</strong> des jeweiligen<br />
Z<strong>eit</strong>inkrements (Berechnungsabschnitts) eingesetzt.<br />
Setzt man anstatt der Winkelgeschwindigk<strong>eit</strong> die Drehzahl n (min -1 ) ein, so berechnet sich <br />
zu:<br />
m m t m n m n m1<br />
2<br />
<br />
2 <br />
60 s t m<br />
min<br />
; m im Bogenmaß<br />
S<strong>eit</strong>e 1.10
Elektrische Maschinen<br />
Prof. Dr.-Ing. Heinz Schmidt-Walter<br />
Der während der Beschleunigung zurückgelegte Winkel ist gleich der Summe der<br />
Einzelwinkel m<br />
:<br />
m<br />
Die Anzahl der Umdrehungen Z im Z<strong>eit</strong>inkrement t berechnen sich:<br />
Z m m<br />
2 n m n m1 t<br />
m<br />
2 60 s<br />
min<br />
Die während der Beschleunigung zurückgelegten Umdrehungen Z betragen <strong>da</strong>nn:<br />
Z Z m<br />
BEISPIEL<br />
entsprechend Abb. 1.12:<br />
Hochlaufz<strong>eit</strong> t hoch<br />
:<br />
J<br />
M 1<br />
1<br />
J<br />
M 2<br />
2<br />
J<br />
M 3<br />
3<br />
J<br />
M 4<br />
4<br />
J 2 <br />
M 1<br />
n<br />
60 s 1<br />
min<br />
J 2 <br />
M 2<br />
n<br />
60 s 2<br />
min<br />
J 2 <br />
M 3<br />
n<br />
60 s 3<br />
min<br />
J 2 <br />
M 4<br />
n<br />
60 s 4<br />
min<br />
J 2 <br />
M 1<br />
<br />
60 s<br />
min<br />
n 1 t 1<br />
J 2 <br />
M 2<br />
<br />
60 s<br />
min<br />
n 2 n 1 t 2<br />
J 2 <br />
M 3<br />
<br />
60 s<br />
min<br />
n 3 n 2 t 3<br />
J 2 <br />
M 4<br />
n<br />
60 s 4 n 3 t 4<br />
min<br />
Hochlaufz<strong>eit</strong>: t 1 t 2 t 3 t 4<br />
t hoch<br />
Beschleunigungswinkel und Anzahl der Umdrehungen Z:<br />
1 t 1 n 1<br />
2 <br />
2 60 s/ min<br />
1 1<br />
2 t 2 n 2n 1 2 <br />
2 60 s/ min<br />
2 2<br />
3 t 3 n 3n 2 2 <br />
2 60 s/ min<br />
3 3<br />
4 t 4 n 4n 3 2 <br />
2 60 s/ min<br />
4 4<br />
Beschleunigungswinkel 1 2 3 4<br />
:<br />
Anzahl der Umdrehungen:<br />
<br />
<br />
2 <br />
Z<br />
S<strong>eit</strong>e 1.11