Jahresbericht 2012 - Institute of Computer Science - Universität ...
Jahresbericht 2012 - Institute of Computer Science - Universität ...
Jahresbericht 2012 - Institute of Computer Science - Universität ...

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
Universität Osnabrück Institut für Informatik <strong>Jahresbericht</strong> <strong>2012</strong> 46<br />
KURT-3D<br />
Leitung: Pr<strong>of</strong>. Dr. Joachim Hertzberg<br />
Mitarbeiter: Dipl.-Inform. Kai Lingemann, Dipl.-Systemwiss. Jochen Sprickerh<strong>of</strong>, Thomas Wiemann,<br />
M.Sc.<br />
Laufzeit: seit 2004<br />
Stichworte: Mobile Robotik, Umgebungsdatenerfassung, Umgebungsdateninterpretation,<br />
Semantische Kartierung<br />
Web:<br />
http://www.inf.uos.de/kbs/KURT3D.html<br />
KURT-3D ist ein mobiler Roboter, ausgerüstet mit einem 3D-Laserscanner. Mit entsprechender Steuerungs- und<br />
Sensordatenverarbeitungs-S<strong>of</strong>tware ausgerüstet ist er grundsätzlich in der Lage, autonom 3D-Modelle<br />
(Messpunktewolken) seiner Arbeitsumgebung aufzunehmen. Die Arbeiten im Projekt KURT-3D bilden den<br />
Kern für weitere Projekte, einschließlich extern geförderter. Im Einzelnen bearbeiten wir die folgenden Themen:<br />
<br />
6D-SPLAM: Zum Aufbau einer Karte muss der folgende Zyklus ablaufen, den wir SPLAM (Simultaneous<br />
Planning, Localization And Mapping) nennen:<br />
(1) Planung und Anfahren der nächsten Scan-Pose,<br />
(2) Lokalisierung im aktuellen Umgebungsmodell und<br />
(3) konsistentes Einfügen des aktuellen Scans in das bisherige Modell.<br />
Die Roboterpose ist im Allgemeinen in 6D gegeben, also in Koordinaten x, y, z und Gier-, Nick- und<br />
Rollwinkel. Wir arbeiten an Algorithmen dafür.<br />
<br />
<br />
Semantische Kartierung: Die Sensorwerte des 3D-Scanners ergeben ausschließlich ein Geometriemodell<br />
der Umgebung. Wir arbeiten an Methoden und Algorithmen, Umgebungsmodelle zu interpretieren,<br />
also beispielsweise Objekte bestimmter Typen darin zu erkennen (Möbel, Wände etc.).<br />
Demonstrator-Anwendungen<br />
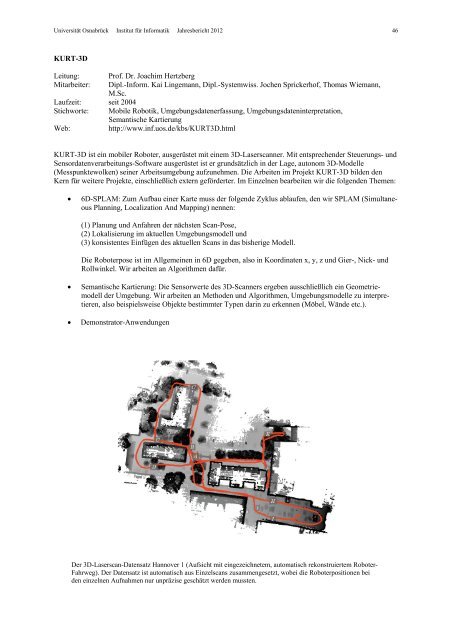
Der 3D-Laserscan-Datensatz Hannover 1 (Aufsicht mit eingezeichnetem, automatisch rekonstruiertem Roboter-<br />
Fahrweg). Der Datensatz ist automatisch aus Einzelscans zusammengesetzt, wobei die Roboterpositionen bei<br />
den einzelnen Aufnahmen nur unpräzise geschätzt werden mussten.