Jahresbericht 2012 - Institute of Computer Science - Universität ...
Jahresbericht 2012 - Institute of Computer Science - Universität ...
Jahresbericht 2012 - Institute of Computer Science - Universität ...

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
Universität Osnabrück Institut für Informatik <strong>Jahresbericht</strong> <strong>2012</strong> 48<br />
Robustness by Autonomous Competence Enhancement (RACE)<br />
Leitung: Pr<strong>of</strong>. Dr. Joachim Hertzberg<br />
Mitarbeiter: Dipl.-Inform. Martin Günther, Sebastian Stock, M.Sc.<br />
Partner: Universität Hamburg (Koordinator), Universität Leeds, Universität Örebro, Universität Aveiro,<br />
HITeC<br />
Laufzeit: 12/2011 – 11/2014<br />
Förderung: EU, 7. RP IKT, Area „Cognitive Systems and Robotics“<br />
Stichworte: Planbasierte Robotersteuerung<br />
Web:<br />
http://www.inf.uos.de/kbs/race.html<br />
Ziel des Projekts insgesamt sind Methoden, in Kognitiven Systemen das Verständnis der Umgebung auf<br />
semantischer Ebene dadurch zu verbessern, dass „Erfahrungen“ des Roboters beim Arbeiten in dieser Umgebung<br />
ausgewertet werden. Erfahrungen entsprechen Aufzeichnungen von Daten auf mehreren Ebenen: Von abstrakten<br />
Daten in Form von Zielen über Aufgaben und aktiven Kontrollstrukturen bis hin zu elementaren Sensor- und<br />
Aktuatordaten. Roboter-Erfahrungen geben somit ein detailliertes Bild darüber ab, wie der Roboter in der<br />
Vergangenheit Ziele erfüllt hat, an Zielen gescheitert ist und welche Fakten und Ereignisse dabei auf allen<br />
Ebenen sensorisch feststellbar waren.<br />
Die Arbeitsgruppe Wissensbasierte Systeme bearbeitet in RACE hauptsächlich die Themen Plangenerierung,<br />
Planausführungskontrolle und Wissensrepräsentation.<br />
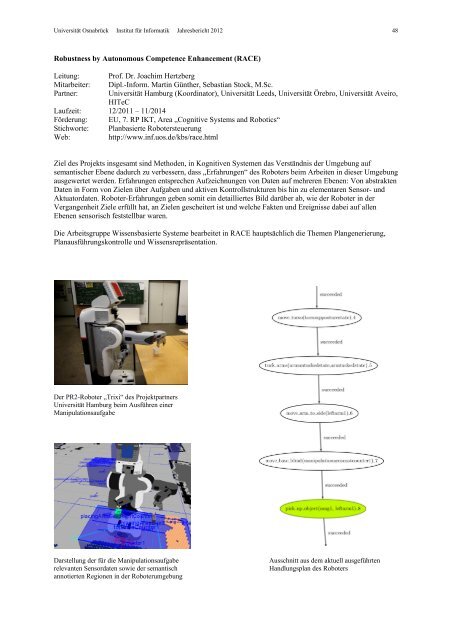
Der PR2-Roboter „Trixi“ des Projektpartners<br />
Universität Hamburg beim Ausführen einer<br />
Manipulationsaufgabe<br />
Darstellung der für die Manipulationsaufgabe<br />
relevanten Sensordaten sowie der semantisch<br />
annotierten Regionen in der Roboterumgebung<br />
Ausschnitt aus dem aktuell ausgeführten<br />
Handlungsplan des Roboters