

Roboterarm - Baureihe RX260 D28057902B - 03 ... - eule-roboter.de
Roboterarm - Baureihe RX260 D28057902B - 03 ... - eule-roboter.de
Roboterarm - Baureihe RX260 D28057902B - 03 ... - eule-roboter.de

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
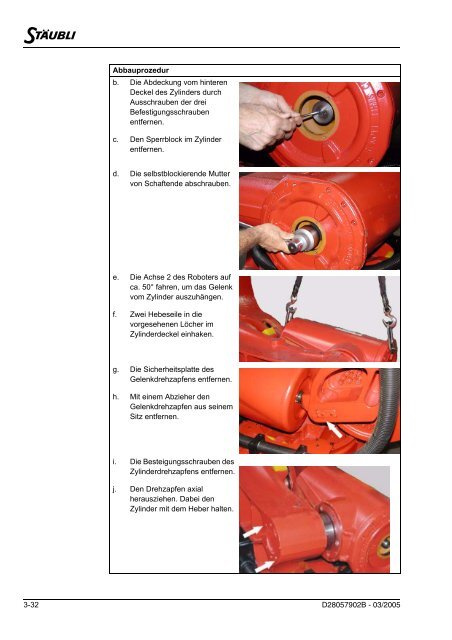
Abbauprozedur<br />
b. Die Ab<strong>de</strong>ckung vom hinteren<br />
Deckel <strong>de</strong>s Zylin<strong>de</strong>rs durch<br />
Ausschrauben <strong>de</strong>r drei<br />
Befestigungsschrauben<br />
entfernen.<br />
c. Den Sperrblock im Zylin<strong>de</strong>r<br />
entfernen.<br />
d. Die selbstblockieren<strong>de</strong> Mutter<br />
von Schaften<strong>de</strong> abschrauben.<br />
e. Die Achse 2 <strong>de</strong>s Roboters auf<br />
ca. 50° fahren, um das Gelenk<br />
vom Zylin<strong>de</strong>r auszuhängen.<br />
f. Zwei Hebeseile in die<br />
vorgesehenen Löcher im<br />
Zylin<strong>de</strong>r<strong>de</strong>ckel einhaken.<br />
g. Die Sicherheitsplatte <strong>de</strong>s<br />
Gelenkdrehzapfens entfernen.<br />
h. Mit einem Abzieher <strong>de</strong>n<br />
Gelenkdrehzapfen aus seinem<br />
Sitz entfernen.<br />
i. Die Besteigungsschrauben <strong>de</strong>s<br />
Zylin<strong>de</strong>rdrehzapfens entfernen.<br />
j. Den Drehzapfen axial<br />
herausziehen. Dabei <strong>de</strong>n<br />
Zylin<strong>de</strong>r mit <strong>de</strong>m Heber halten.<br />
3-32 <strong>D28057902B</strong> - <strong>03</strong>/2005













