¨Ubung 1 DC–Motor - Power Electronics Systems Laboratory
¨Ubung 1 DC–Motor - Power Electronics Systems Laboratory
¨Ubung 1 DC–Motor - Power Electronics Systems Laboratory

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
<strong>Power</strong> Electronic <strong>Systems</strong><br />
<strong>Laboratory</strong><br />
Dr. T. Gempp Übung 1 FS2012 Mechatronik<br />
<strong>DC–Motor</strong><br />
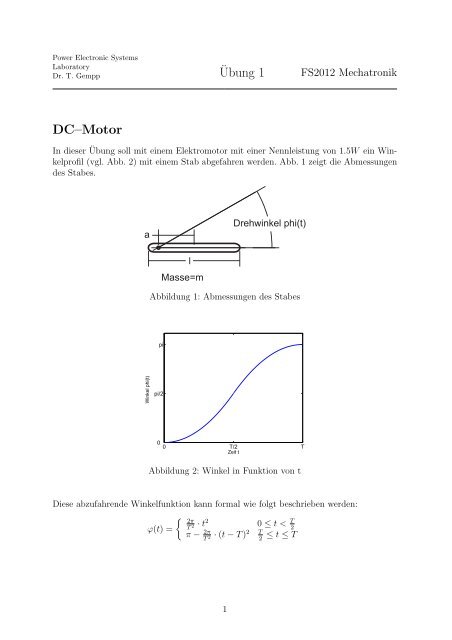
In dieser Übung soll mit einem Elektromotor mit einer Nennleistung von 1.5W ein Winkelprofil<br />
(vgl. Abb. 2) mit einem Stab abgefahren werden. Abb. 1 zeigt die Abmessungen<br />
des Stabes.<br />
a<br />
Drehwinkel phi(t)<br />
l<br />
Masse=m<br />
Abbildung 1: Abmessungen des Stabes<br />
pi<br />
Winkel phi(t)<br />
pi/2<br />
0<br />
0 T/2 T<br />
Zeit t<br />
Abbildung 2: Winkel in Funktion von t<br />
Diese abzufahrende Winkelfunktion kann formal wie folgt beschrieben werden:<br />
{ 2π<br />
·t<br />
ϕ(t) =<br />
2 0 ≤ t < T T 2 2<br />
π − 2π ·(t−T) 2 T ≤ t ≤ T<br />
T 2 2<br />
1
Aufgaben<br />
Abmessungen des Stabes:<br />
m = 2g<br />
l = 2.5cm<br />
a = 1cm<br />
T = 0.05s<br />
1. BerechnenSiedasTrägheitsmomentdiesesStabes.VerwendenSiedazudieNäherungsformel<br />
für das Trägheitsmoment eines langen Stabes mit Drehachse im Mittelpunkt<br />
und verschieben Sie die Drehachse gemäss Satz von Steiner in die gewünschte Lage.<br />
2. Berechnen Sie das Drehmoment M(t) bei der vorgegebenen Bahnkurve<br />
3. Machen Sie aufgrund der Abmessungen des Motors eine Abschätzung über die Leistungsdichtes<br />
bei Nennleistung.<br />
4. Berechnen Sie den Strom i(t) und die Spannung u(t) an den Klemmen des Motors<br />
mit der Bestellnummer 118392 während dem Drehvorgang.<br />
5. Berechnen Sie die Arbeit, die in den Motor gesteckt werden muss während dem<br />
ganzen Drehvorgang.<br />
6. Berechnen Sie den Wirkungsgrad η(t).<br />
2
Sonnenstoren<br />
Eine Sonnenstore wird motorbetrieben ein– und ausgefahren. Ein Elektromotor treibt<br />
über ein Getriebe mit der Übersetzung ü = 300 : 1 (Übersetzung ins Langsame n Motor ><br />
n Rolle ) eine Rolle an, auf der der Stoff der Store aufgewickelt wird. Der Stoff wird als unendlich<br />
dünn und masselos angenommen, ebenso werden Haltevorrichtungen und jegliche<br />
Reibung vernachlässigt.<br />
BM<br />
Abbildung 3: Bild Sonnenstore<br />
90mm<br />
1800mm<br />
40mm<br />
80mm<br />
eingefahren<br />
m =5kg<br />
s<br />
600mm<br />
ausgefahren<br />
Abbildung 4: Skizze der Sonnenstore<br />
In dieser Aufgabe soll ein Einfahrvorgang der Sonnenstore betrachtet werden. Die Einfahrgeschwindigkeit<br />
wird während τ = 0.5s mit konstanter Beschleunigung erhöht oder<br />
gesenkt, die totale Einfahrzeit beträgt T = 25s. Die Store hat eine Breite B M = 4m. Die<br />
Rolle besteht aus Metall mit ρ S = 7kg/dm 3 . Der Stab am vorderen Ende der Store wiegt<br />
5kg.<br />
Das Trägheitsmoment eines Hohlstabes berechnet sich nach dieser Formel:<br />
J = m 2 (r2 a +r 2 i)<br />
Das Trägheitsmoment des Motors sowie des Getriebes kann vernachlässigt werden.<br />
3
1. Die Rolle der Sonnenstore rollt beim Einfahrvorgang den Stoff mit dem gegebenen<br />
Winkelgeschwindigkeitsprofil auf. Berechnen Sie die nötige maximale Winkelgeschwindigkeit<br />
ω.<br />
<br />
<br />
T-<br />
T<br />
t<br />
Abbildung 5: Verlauf der Winkelgeschwindigkeit der Rolle<br />
2. Bilden Sie das mechanische Modell der Sonnenstore, indem Sie die auftretenden<br />
Kräfte und Trägheitsmomente berechnen.<br />
3. Berechnen Sie das zum Einfahren der Sonnenstore nötige Drehmoment an der Rolle<br />
in Abhängigkeit der Zeit.<br />
4. Zum Antrieb der Rolle über ein Getriebe stehen zwei Elektromotoren zur Auswahl,<br />
Serie 1331 012 SR und 1336 012 C. Bestimmen Sie anhand der Datenblätter den<br />
geeigneten Motor und begründen Sie ihre Wahl. Für diesen Motor sollen nun die<br />
Verläufe von Strom und Spannung über der Zeit berechnet und aufgezeichnet werden.<br />
5. Berechnen Sie die Energieaufnahme des Motors für einen Einfahrvorgang.<br />
6. Der Antriebsmotor der Sonnenstore kann durch einen Defekt am Sonnenstorenmechanismus<br />
oder durch äussere Einflüsse blockiert werden. Der Motor soll durch eine<br />
Überstromabschaltung vor Überlast geschützt werden. Bestimmen Sie die Stromgrenze<br />
bei der dieser Sicherheitsschalter ansprechen soll.<br />
4
maxon DC motor<br />
Lagerprogramm<br />
Standardprogramm<br />
Sonderprogramm (auf Anfrage!)<br />
Bestellnummern<br />
118392 118393 118394 118395 118396 118397 118398 118399 118400<br />
Motordaten<br />
1 Typenleistung W 1.5 1.5 1.5 1.5 1.5 1.5 1.5 1.5 1.5<br />
2 Nennspannung Volt 3.0 3.0 4.5 4.5 6.0 6.0 9.0 9.0 12.0<br />
3 Leerlaufdrehzahl min -1 13000 10700 12800 10600 12400 9880 12200 11100 12500<br />
4 Anhaltemoment mNm 3.12 2.52 3.03 2.47 3.01 2.61 3.08 2.83 3.24<br />
5 Kennliniensteigung min -1 mNm -1 4250 4340 4290 4370 4180 3860 4010 3980 3930<br />
6 Leerlaufstrom mA 24 19 16 12 11 8 7 6 6<br />
7 Anlaufstrom mA 1440 963 919 619 660 458 444 371 360<br />
8 Anschlusswiderstand Ohm 2.08 3.11 4.90 7.27 9.09 13.1 20.3 24.3 33.3<br />
9 Grenzdrehzahl min -1 19000 19000 19000 19000 19000 19000 19000 19000 19000<br />
10 Max. Dauerbelastungsstrom mA 710 580 462 379 339 282 227 208 177<br />
11 Max. Dauerdrehmoment mNm 1.54 1.52 1.53 1.51 1.55 1.61 1.58 1.58 1.59<br />
12 Max. Abgabeleistung, bei Nennspannung mW 1050 699 1000 673 962 665 971 810 1050<br />
13 Max. Wirkungsgrad % 76 75 76 74 76 75 76 76 77<br />
14 Drehmomentkonstante mNm A -1 2.16 2.62 3.30 3.99 4.56 5.69 6.95 7.63 9.00<br />
15 Drehzahlkonstante min -1 V -1 4410 3650 2890 2400 2100 1680 1370 1250 1060<br />
16 Mechanische Anlaufzeitkonstante ms 4 4 4 4 4 4 4 4 4<br />
17 Rotorträgheitsmoment gcm 2 0.098 0.096 0.096 0.094 0.098 0.105 0.101 0.102 0.103<br />
18 Anschlussinduktivität mH 0.02 0.03 0.04 0.06 0.08 0.12 0.18 0.21 0.30<br />
19 Therm. Widerstand Gehäuse-Luft KW -1 38 38 38 38 38 38 38 38 38<br />
20 Therm. Widerstand Rotor-Gehäuse KW -1 9.0 9.0 9.0 9.0 9.0 9.0 9.0 9.0 9.0<br />
21 Therm. Zeitkonstante der Wicklung s 2 2 2 2 2 2 2 2 2<br />
Spezifikationen<br />
Axialspiel<br />
0.05 - 0.15 mm<br />
Max. Belastung der Sinterlager<br />
axial (dynamisch)<br />
0.15 N<br />
radial (4 mm ab Flansch)<br />
0.4 N<br />
Aufpressdruck (statisch)<br />
15 N<br />
Radialspiel bei Sinterlager 0.012 mm<br />
Umgebungstemperatur<br />
-20/+65°C<br />
Max. Rotortemperatur<br />
+85°C<br />
Anzahl Kollektorsegmente 7<br />
Motorgewicht<br />
10 g<br />
Motordaten gemäss Tabelle sind Nenndaten.<br />
Toleranzdarstellung Seite 43.<br />
Detailliertere Angaben entnehmen Sie aus dem<br />
maxon-selection-Programm auf der beigelegten<br />
CD-Rom.<br />
Betriebsbereiche Legende LagerprogrammErläuterungen Seite 49<br />
n [min -1 ]<br />
Empfohlener<br />
Standardprogramm<br />
Leistungsbereich<br />
0000<br />
Sonderprogramm (auf Anfrage!)<br />
1.5 Watt<br />
Dauerbetriebsbereich<br />
6000<br />
unter Berücksichtigung der angegebenen thermischen<br />
Widerstände (Ziffer 19 und 20) und einer Umgebungstemperatur<br />
2000<br />
von 25°C wird bei dauernder<br />
Belastung die maximal zulässige Rotortemperatur<br />
8000<br />
erreicht. = thermische Grenze<br />
Kurzzeitbetrieb<br />
4000<br />
Der Motor darf kurzzeitig und wiederkehrend überlastet<br />
werden.<br />
1 2 3 4 M [mNm]<br />
0.1 0.2 0.3 0.4 I [A]<br />
118400<br />
118392<br />
Motor mit hochohmiger Wicklung<br />
Motor mit niederohmiger Wicklung<br />
0.4 0.8 1.2 1.6 2.0 I [A]<br />
maxon-Baukastensystem<br />
Planetengetriebe<br />
10 mm<br />
0.005-0.1 Nm<br />
Detail Seite 168<br />
Planetengetriebe<br />
10 mm<br />
0.01-0.15 Nm<br />
Detail Seite 169<br />
Digital-Magnet-<br />
Encoder 10 mm<br />
12 Imp., 2 Kanal<br />
Detail Seite 211<br />
Ausgabe April 2001 / Änderungen vorbehalten maxon DC motor 51
Massbilder<br />
Auf der CD-ROM stehen die Massbilder im<br />
DXF-Format für den Import in beliebige CAD-Systeme<br />
zur Verfügung.<br />
Darstellung der Ansichten gemäss Projektionsmethode<br />
E (ISO)<br />
Alle Abmessungen in [mm].<br />
Befestigungsgewinde in Kunststoff<br />
Schraubverbindungen bei Motoren mit Kunststoffflansch<br />
bedürfen einer speziellen Beachtung.<br />
M A<br />
Maximales Anzugsdrehmoment<br />
[Ncm]<br />
Auf diesen Wert darf ein Einschraubgerät (Elektroschrauber<br />
etc.) eingestellt werden.<br />
L Aktive Einschraubtiefe [mm]<br />
Das Verhältnis von Einschraubtiefe zu Gewindedurchmesser<br />
muss mindestens 2:1 betragen. Die<br />
Einschraubtiefe darf die nutzbare Gewindelänge nicht<br />
überschreiten!<br />
Zeile 5 Kennliniensteigung<br />
n/ M [min -1 mNm -1 ]<br />
Die Drehzahl - Drehmoment - Kennlinie gibt Auskunft<br />
über die Stärke des Motors. Je flacher die<br />
Kennlinie, desto weniger verändert sich die Drehzahl<br />
bei Lastschwankungen. Die Kennliniensteigung<br />
ist ein Rechenwert für 25°C Wicklungstemperatur.<br />
Zeile 6 Leerlaufstrom I o [mA]<br />
ist der Strom, der sich bei unbelastetem Motor einstellt.<br />
Er ist von der Bürstenreibung und der Reibung<br />
in den Lagern abhängig und ändert sich etwas<br />
mit der Drehzahl.<br />
Zeile 7 Anlaufstrom I A [mA], [A]<br />
ist der Quotient aus Nennspannung (Klemmenspannung)<br />
und Anschlusswiderstand des Motors.<br />
Er ist dem Anhaltemoment äquivalent.<br />
Zeile 12<br />
Maximale Abgabeleistung<br />
P max [mW], [W]<br />
ist die rechnerische Maximalleistung bei Nennspannung<br />
und 25°C Rotortemperatur. Die zulässigen<br />
Grenzwerte liegen oft darunter (siehe max.<br />
Dauerbelastungsstrom und Grenzdrehzahl).<br />
Zeile 13 Maximaler Wirkungsgrad max[%]<br />
Er bestimmt sich aus dem Verhältnis von Leerlaufund<br />
Anlaufstrom. Je höher er ist, desto näher liegt<br />
er bei den Leerlaufdaten. Im allgemeinen liegt er<br />
bei etwa 1/7 des Anhaltemomentes. Nicht immer<br />
kennzeichnet er auch den optimalen Arbeitspunkt.<br />
Zeile 14 Drehmomentkonstante k M [mNm A -1 ]<br />
oder auch spezifisches Drehmoment, ist der Quotient<br />
aus erzeugtem Drehmoment und dem dazugehörenden<br />
Strom.<br />
Zeile 15 Drehzahlkonstante k n [min -1 V -1 ]<br />
zeigt die spezifische Drehzahl pro 1 Volt angelegter<br />
Spannung. Reibungsverluste nicht berücksichtigt.<br />
Der reziproke Wert der Drehzahlkonstante wird<br />
Spannungs- oder Back-EMF-Konstante genannt.<br />
Zeile 8 Anschlusswiderstand R[ ]<br />
Motordaten:<br />
ist der Widerstand, der bei 25°C an den Anschlussklemmen<br />
gemessen wird. Er bestimmt bei gegebener<br />
Spannung den Anlaufstrom. Bei Graphitbürs-<br />
m [ms]<br />
Zeile 16 Mechanische Anlaufzeitkonstante<br />
Zeile 1 Typenleistung P 2T [W]<br />
ist die im empfohlenen Leistungsbereich maximale ten ist zu beachten, dass sich der Übergangswiderstand<br />
belastungsabhängig verändert.<br />
auf 63% seiner Leerlaufdrehzahl zu kommen.<br />
ist die Zeit, die der Rotor benötigt, um vom Stillstand<br />
Abgabeleistung. Sie ist typenabhängig und entspricht<br />
der Darstellung im Selection Guide (siehe<br />
Zeile 17 Rotorträgheitsmoment J R [gcm 2 ]<br />
auch Seite 50 bis 148 unter Betriebsbereiche).<br />
ist das polare Massenträgheitsmoment des Rotors.<br />
Zeile 2 Nennspannung U [Volt]<br />
Zeile 9 Grenzdrehzahl n max [min -1 ]<br />
ist diejenige Spannung, auf die sich alle Nenndaten Die Grenzdrehzahl sollte im Normalbetrieb nicht Zeile 18 Anschlussinduktivität L [mH]<br />
beziehen (Zeile 3, 4, 6, 7, 12, 13). Sie ist so gewählt, überschritten werden. Bei höheren Drehzahlen ist ist die Induktivität der Wicklung, an den Anschlussklemmen<br />
gemessen<br />
dass im Leerlauf die Grenzdrehzahl nicht überschritten<br />
wird. Die Motoranwendung ist aber nicht vorzeitigen Ausfall des Motors führen können. (bei 1 kHz, sinus).<br />
mit Kommutierungsproblemen zu rechnen, die zum<br />
auf diese Spannung beschränkt. Um die Typenleistung<br />
(Zeile 1) zu erreichen, sind im Betriebspunkt<br />
Zeile 19 Thermischer Widerstand R th2 [K W -1 ]<br />
höhere Spannungen zulässig. Entsprechend steigt<br />
von Gehäuse zu umgebender Luft. Charakteristischer<br />
Wert des thermischen Übergangswiderstan-<br />
Zeile 10 Maximaler Dauerbelastungsstrom<br />
auch die maximale Abgabeleistung (Zeile 12) an.<br />
I zul. [mA],[A]<br />
des ohne zusätzliche Wärmeableitung. Zeile 19<br />
Zeile 3 Leerlaufdrehzahl n o [min -1 ]<br />
ist der Strom, der bei einer Umgebungstemperatur und 20 addiert, bestimmen die max. zul. Verlustleistung.<br />
ist die Drehzahl, die sich bei unbelastetem Motor von 25°C die Wicklung bis zur maximal zulässigen<br />
unter Betrieb mit Nennspannung einstellt. Sie ist Temperatur erwärmt.<br />
Zeile 20 Thermischer Widerstand R<br />
praktisch proportional zur angelegten Spannung.<br />
th1 [K W -1 ]<br />
von Rotor zu Gehäuse.<br />
Zeile 4 Anhaltemoment M H [mNm]<br />
ist das Lastmoment, das bei Nennspannung einen Zeile 11 Dauerdrehmoment M zul [mNm]<br />
Stillstand der Welle bewirkt. Die hierbei rasch ansteigende<br />
Motortemperatur führt zu einer entsprechen-<br />
abgegeben werden kann und dabei die Wicklung<br />
lung th1 [s]<br />
ist das Drehmoment, das dauernd oder im Mittel Zeile 21 Thermische Zeitkonstante Wickden<br />
Abnahme des Anhaltemomentes (siehe auch<br />
unter «Technik – kurz und bündig» – Temperatur).<br />
bis zur maximal zulässigen Temperatur erwärmt.<br />
Basis ist eine Umgebungstemperatur von 25°C.<br />
ist die Zeit, die die Wicklung benötigt, um 63% der<br />
Endtemperatur zu erreichen.<br />
maxon DC motor<br />
Betriebsbereiche Legende Beispiel von Seite 113<br />
n [min -1 ]<br />
1000<br />
9000<br />
7000<br />
5000<br />
3000<br />
1000<br />
5 10 15 20<br />
0.1 0.2 0.3 0.4<br />
1 2 3<br />
5 Watt<br />
M [mNm]<br />
I [A]<br />
I [A]<br />
Empfohlener Leistungsbereich<br />
Dauerbetriebsbereich<br />
unter Berücksichtigung der angegebenen thermischen<br />
Widerstände (Ziffer 19 und 20) und<br />
einer Umgebungstemperatur von 25°C wird bei<br />
dauernder Belastung die maximal zulässige<br />
Rotortemperatur erreicht. = thermische Grenze<br />
Kurzzeitbetrieb<br />
Der Motor darf kurzzeitig und wiederkehrend<br />
überlastet werden.<br />
110128 Motor mit hochohmiger Wicklung (Zeile 8)<br />
110117 Motor mit niederohmiger Wicklung (Zeile 8)<br />
Kurzzeitbetrieb<br />
Drehzahl (n), Drehmoment (M), Strom (l):<br />
Die Eckpunkte davon stellen Grenzwerte für den<br />
Dauer- und Kurzzeitbetrieb dar. Die in den Tabellen<br />
aufgeführten Motordaten (Zeile 3, 4, 6, 7, 12, 13) beziehen<br />
sich auf die Nennspannung (Zeile 2), sind<br />
also keine Grenzwerte. Diese werden bei höheren<br />
Spannungen erreicht.<br />
110128<br />
Typenleistung P 2T (W) (Zeile 1)<br />
Anlaufstrom I A bei Nennspannung<br />
(Zeile 7) sowie zugehöriges<br />
Anhaltemoment<br />
M H (mNm) (Zeile 4) I A = U R 103 (mA)<br />
Wicklungsnummer mit zugehörigem<br />
Stromniveau bei entsprechendem<br />
Drehmoment.<br />
ON Motor in Betrieb<br />
OFF Motor steht still<br />
Î max. Spitzenstrom<br />
I zul. max. Dauerbelastungsstrom (Zeile 10)<br />
t ON Einschaltzeit [s]<br />
T Zykluszeit t ON +t OFF [s]<br />
ED Einschaltdauer in Prozenten der<br />
Zykluszeit.<br />
Der Motor darf während X% der gesamten<br />
Zykluszeit T um das Verhältnis<br />
Î/I zul überlastet werden.<br />
Ausgabe April 2001 / Änderungen vorbehalten maxon DC motor 49
DC-Kleinstmotoren<br />
Edelmetallkommutierung<br />
Serie<br />
1<br />
2<br />
3<br />
4<br />
1331 ... SR<br />
Nennspannung<br />
Anschlusswiderstand<br />
Abgabeleistung<br />
Wirkungsgrad<br />
3,2 mNm<br />
Kombinierbar mit<br />
Getriebe:<br />
14/1, 15/3, 15/5<br />
Impulsgeber:<br />
IE2<br />
1331 T 006 SR 012 SR 024 SR<br />
U N<br />
R<br />
6<br />
2,83<br />
12<br />
13,7<br />
24<br />
52,9<br />
P 2 max.<br />
3,11 2,57 2,66<br />
η max.<br />
81 80 80<br />
Volt<br />
Ω<br />
W<br />
%<br />
5<br />
6<br />
7<br />
8<br />
Leerlaufdrehzahl<br />
Leerlaufstrom (bei Wellen ø 1,5 mm)<br />
Anhaltemoment<br />
Reibungsdrehmoment<br />
n o<br />
I o<br />
M H<br />
M R<br />
10 600 9 900 10 400<br />
0,0220 0,0105 0,0055<br />
11,20 9,90 9,76<br />
0,12 0,12 0,12<br />
rpm<br />
A<br />
mNm<br />
mNm<br />
9<br />
10<br />
11<br />
12<br />
Drehzahlkonstante<br />
Generator-Spannungskonstante<br />
Drehmomentkonstante<br />
Stromkonstante<br />
k n<br />
k E<br />
k M<br />
k I<br />
1 790 835 439<br />
0,56 1,20 2,28<br />
5,35 11,4 21,8<br />
0,187 0,087 0,046<br />
rpm/V<br />
mV/rpm<br />
mNm/A<br />
A/mNm<br />
13<br />
14<br />
15<br />
16<br />
17<br />
Steigung der n-M-Kennlinie<br />
Anschlussinduktivität<br />
Mechanische Anlaufzeitkonstante<br />
Rotorträgheitsmoment<br />
Winkelbeschleunigung<br />
∆n/∆M<br />
L<br />
τ m<br />
J<br />
α max.<br />
946 1 000 1 070<br />
70 310 1 100<br />
7 7 7<br />
0,71 0,67 0,63<br />
160 150 160<br />
rpm/mNm<br />
µH<br />
ms<br />
gcm 2<br />
. 10 3 rad/s 2<br />
18<br />
19<br />
20<br />
Wärmewiderstände<br />
Thermische Zeitkonstante<br />
Betriebstemperaturbereich:<br />
– Motor<br />
– Rotor, max. zulässig<br />
Rth 1 / Rth 2<br />
τ w1 / τ w2<br />
6 / 25<br />
5 / 190<br />
– 30 ... + 85<br />
+125<br />
(Sonderausführung – 55 … + 125)<br />
K/W<br />
s<br />
°C<br />
°C<br />
21<br />
22<br />
23<br />
Wellenlagerung<br />
Wellenbelastung, max. zulässig:<br />
– für Wellendurchmesser<br />
– radial bei 3000 rpm (3 mm vom Lager)<br />
– axial bei 3000 rpm<br />
– axial im Stillstand<br />
Wellenspiel:<br />
– radial<br />
– axial<br />
≤<br />
≤<br />
Sinterlager<br />
(standard)<br />
1,5<br />
1,2<br />
0,2<br />
20<br />
0,03<br />
0,2<br />
mm<br />
N<br />
N<br />
N<br />
mm<br />
mm<br />
24<br />
25<br />
26<br />
Gehäusematerial<br />
Gewicht<br />
Drehrichtung<br />
Stahl, schwarz beschichtet<br />
19<br />
rechtsdrehend auf Abtriebswelle gesehen<br />
g<br />
Empfohlene Werte<br />
27 Drehzahl bis<br />
28 Dauerdrehmoment bis<br />
29 Thermisch zulässiger Dauerstrom<br />
ne max.<br />
Me max.<br />
Ie max.<br />
12 000 12 000 12 000<br />
3,2 3,2 3,2<br />
0,81 0,37 0,19<br />
rpm<br />
mNm<br />
A<br />
0<br />
0<br />
ø13 -0,052 ø6 -0,05<br />
A<br />
ø3,5<br />
ø1,5 -0,004<br />
-0,009<br />
ø0,05 A<br />
0,02<br />
ø2,38 -0,015<br />
0<br />
ø0,07 A<br />
0,04<br />
DIN 58400<br />
m=0,2<br />
z=9<br />
x=+0,35<br />
10,6<br />
1<br />
31,2<br />
1<br />
2,1 6 ±0,3<br />
8,1 ±0,3<br />
1,1<br />
2,1<br />
4,3 ±0,3<br />
2<br />
3,9<br />
1331 T ... SR<br />
Angaben zu Gewährleistung und Lebensdauer sowie weitere<br />
technische Erläuterungen siehe „Technische Informationen”.<br />
1331 E ... SR<br />
für Getriebe 15/...<br />
Sonderausführungen für DC-Kleinstmotoren sind auf Seite 62 ersichtlich.<br />
Änderungen vorbehalten.<br />
41 www.faulhaber.com
DC-Kleinstmotoren<br />
Graphitkommutierung<br />
Serie<br />
1<br />
2<br />
3<br />
4<br />
1336 ... C<br />
Nennspannung<br />
Anschlusswiderstand<br />
Abgabeleistung<br />
Wirkungsgrad<br />
4 mNm<br />
Kombinierbar mit<br />
Getriebe:<br />
14/1<br />
Impulsgeber:<br />
IE2, 30B, 20/21B<br />
1336 U 006 C 012 C 024 C<br />
U N<br />
R<br />
6<br />
4,0<br />
12<br />
15,6<br />
24<br />
63,6<br />
P 2 max.<br />
1,75 1,98 2,02<br />
η max.<br />
68 69 68<br />
Volt<br />
Ω<br />
W<br />
%<br />
5<br />
6<br />
7<br />
8<br />
Leerlaufdrehzahl<br />
Leerlaufstrom (bei Wellen ø 2,0 mm)<br />
Anhaltemoment<br />
Reibungsdrehmoment<br />
n o<br />
I o<br />
M H<br />
M R<br />
8 600 9 000 9 200<br />
0,051 0,025 0,013<br />
7,79 8,40 8,39<br />
0,30 0,29 0,31<br />
rpm<br />
A<br />
mNm<br />
mNm<br />
9<br />
10<br />
11<br />
12<br />
Drehzahlkonstante<br />
Generator-Spannungskonstante<br />
Drehmomentkonstante<br />
Stromkonstante<br />
k n<br />
k E<br />
k M<br />
k I<br />
1 620 810 406<br />
0,616 1,230 2,460<br />
5,88 11,80 23,50<br />
0,170 0,085 0,042<br />
rpm/V<br />
mV/rpm<br />
mNm/A<br />
A/mNm<br />
13<br />
14<br />
15<br />
16<br />
17<br />
Steigung der n-M-Kennlinie<br />
Anschlussinduktivität<br />
Mechanische Anlaufzeitkonstante<br />
Rotorträgheitsmoment<br />
Winkelbeschleunigung<br />
∆n/∆M<br />
L<br />
τ m<br />
J<br />
α max.<br />
1 100 1 070 1 100<br />
80 300 1 200<br />
5,5 5,5 5,5<br />
0,48 0,49 0,48<br />
160 170 180<br />
rpm/mNm<br />
µH<br />
ms<br />
gcm 2<br />
. 10 3 rad/s 2<br />
18<br />
19<br />
20<br />
Wärmewiderstände<br />
Thermische Zeitkonstante<br />
Betriebstemperaturbereich:<br />
– Motor<br />
– Rotor, max. zulässig<br />
Rth 1 / Rth 2<br />
τ w1 / τ w2<br />
7 / 21<br />
5,5 / 168<br />
– 30 ... +100<br />
+125<br />
K/W<br />
s<br />
°C<br />
°C<br />
21<br />
22<br />
23<br />
Wellenlagerung<br />
Wellenbelastung, max. zulässig:<br />
– für Wellendurchmesser<br />
– radial bei 3000 rpm (3 mm vom Lager)<br />
– axial bei 3000 rpm<br />
– axial im Stillstand<br />
Wellenspiel:<br />
– radial<br />
– axial<br />
≤<br />
=<br />
Kugellager, vorgespannt<br />
2,0<br />
8<br />
0,8<br />
10<br />
0,015<br />
0<br />
mm<br />
N<br />
N<br />
N<br />
mm<br />
mm<br />
24<br />
25<br />
26<br />
Gehäusematerial<br />
Gewicht<br />
Drehrichtung<br />
Stahl, schwarz beschichtet<br />
23<br />
rechtsdrehend auf Abtriebswelle gesehen<br />
g<br />
Empfohlene Werte<br />
27 Drehzahl bis<br />
28 Dauerdrehmoment bis<br />
29 Thermisch zulässiger Dauerstrom<br />
ne max.<br />
Me max.<br />
Ie max.<br />
9 000 9 000 9 000<br />
4 4 4<br />
0,800 0,400 0,200<br />
rpm<br />
mNm<br />
A<br />
Lage zu Anschlussfahnen unbestimmt<br />
2x<br />
ø0,3 A<br />
M1,6 1,5 tief ø 3,5<br />
ø7<br />
0<br />
ø13 -0,05<br />
0<br />
ø6 -0,02<br />
A<br />
ø3,5<br />
ø2 -0,004<br />
-0,009<br />
ø0,05<br />
0,02<br />
A<br />
10<br />
9<br />
1 1<br />
2 6 ±0,3<br />
3 ±0,5 36<br />
2<br />
8 ±0,3<br />
5 ±0,4<br />
1336 U<br />
Angaben zu Gewährleistung und Lebensdauer sowie weitere<br />
technische Erläuterungen siehe „Technische Informationen”.<br />
42<br />
Sonderausführungen für DC-Kleinstmotoren sind auf Seite 62 ersichtlich.<br />
Änderungen vorbehalten.<br />
www.faulhaber.com